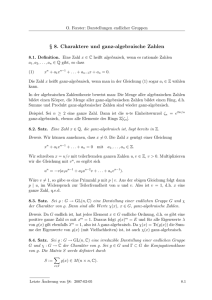
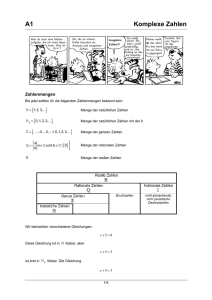
(aij)n×n eine gegebene (n×n)-Matrix. Die zur Matrix A klassisch
Werbung
n×n eine gegebene (n×n)-Matrix. Die zur Matrix A klassisch")
Berechnung der Inversen Definition 6. Es sei A = (aij )n×n eine gegebene (n×n)-Matrix. Die zur Matrix A klassisch adjungierte Matrix bzw. die Adjunkte A∗ ist als die Transponierte der Matrix (ãij )n×n definiert, also ist ∗ T A := (ãij )n×n, wobei die Komponenten der Matrix (ãij )n×n durch ⎛ ãij 1 ⎜ 0 i+j := (−1) det ⎜ ⎝ ... 0 0 ··· Aij 0 ⎞ ⎟ ⎟ ⎠ gegeben sind und die hier angegebene Matrix Aij aus der Matrix A durch Streichen der i-ten Zeile und der j -ten Spalte gewonnen wird. Lemma 3. Es sei A eine (n × n)-Matrix mit det A = 0. Dann ist die zu A inverse Matrix durch 1 −1 ∗ A = A det A gegeben. Für det A = 0 besitzt A keine Inverse. D. Horstmann: Oktober 2016 108 Berechnung der Inversen Beispiel 16. Es sei a b A= c d mit a · d − b · c = 0. Die Inverse von A ist nach dem oben genannten Satz gegeben durch A −1 1 = a·d−b·c d −c −b a . Für (2 × 2)-Matrizen hat man also eine einfache Formel zur Bestimmung der Inversen zur Hand. D. Horstmann: Oktober 2016 109 Berechnung der Inversen Beispiel 17. Es sei nun ⎞ 2 3 −4 A = ⎝ 0 −4 2 ⎠. 1 −1 5 Die Berechnung der Determinante ergibt in diesem Fall: det A = −46. Nun bestimmen wir die Einträge der Matrix (ãij )3×3. Nach der Formel zur Berechnung der Einträge erhalten wir: ⎞ ⎛ 1 0 0 1+1 ã11 = (−1) · det ⎝ 0 −4 2 ⎠ = −18, 0 −1 5 ⎛ ⎞ 1 0 0 1+2 ã12 = (−1) · det ⎝ 0 0 2 ⎠ = 2, 0 1 5 ⎛ ⎞ 1 0 0 1+3 · det ⎝ 0 0 −4 ⎠ = 4, ã13 = (−1) 0 1 −1 D. Horstmann: Oktober 2016 ⎛ 110 ⎛ ã21 = ã22 = ã23 = ã31 = ã32 = D. Horstmann: Oktober 2016 1 2+1 (−1) · det ⎝ 0 0 ⎛ 1 2+2 (−1) · det ⎝ 0 0 ⎛ 1 2+3 (−1) · det ⎝ 0 0 ⎛ 1 3+1 (−1) · det ⎝ 0 0 ⎛ 1 3+2 (−1) · det ⎝ 0 0 ⎞ 0 −4 ⎠ = −11, 5 ⎞ 0 0 2 −4 ⎠ = 14, 1 5 ⎞ 0 0 2 3 ⎠ = 5, 1 −1 ⎞ 0 0 3 −4 ⎠ = −10, −4 2 ⎞ 0 0 2 −4 ⎠ = −4, 0 2 0 3 −1 111 ⎛ ã33 und somit insgesamt: woraus: = (−1) 3+3 1 · det ⎝ 0 0 0 2 0 ⎞ 0 3 ⎠ = −8, −4 ⎞ −18 2 4 (ãij )3×3 = ⎝ −11 14 5 ⎠ −10 −4 −8 ⎞ ⎛ −18 −11 −10 1 −1 A =− ⎝ 2 14 −4 ⎠ 46 4 5 −8 ⎛ folgt. D. Horstmann: Oktober 2016 112 Spezielle Gleichungssysteme und die Eigenwerte einer Matrix Von besonderem Interesse sind Gleichungssysteme, bei denen auf der rechten Seite nicht ein konstanter Spaltenvektor b steht, sondern ein Vielfaches des Variablenvektors x. Solche Gleichungssysteme haben die Gestalt: A · x = λ · x. (11) Natürlich stellt sich als erstes die Frage, ob es überhaupt solche Zahlen λ und derartige Vektoren gibt, so dass Gleichungen der Form (11) auftreten. Wobei hier zuerst das Augenmerk auf der Frage nach der Existenz derartiger Zahlen λ liegt und man sich erst im zweiten Schritt die Frage nach der Existenz des Vektors x stellt, der diese Gleichung erfüllt und nicht gleich dem Nullvektor ist. Zunächst stellen wir fest, dass sich die Gleichung (11) wie folgt umschreiben lässt: (A − λ · I) · x = 0 (12) D. Horstmann: Oktober 2016 113 Spezielle Gleichungssysteme und die Eigenwerte einer Matrix Wenn die Matrix A − λ · I invertierbar ist, so ist x = 0 die einzige denkbare Lösung der Gleichung (12). Wir suchen aber gerade Lösungen dieser Gleichung, die nicht gleich Null sind. Das bedeutet, dass die Matrix A − λ · I nicht invertierbar sein darf. Nach dem vorangegangenen Überlegungen ist dies genau dann der Fall, wenn det(A − λ · I) = 0 (13) gilt. Da die Berechnung der Determinante von A − λ · I auf ein Polynom in der Unbekannten λ führt, nennt man det(A − λ · I) auch charakteristisches Polynom der Matrix A und die Gleichung (13) charakteristische Gleichung. D. Horstmann: Oktober 2016 114 Eigenwerte und Eigenvektoren Beispiel 18. Es sei 1 3 A= . 2 4 Wir suchen die λ, für die das charakteristische Polynom der Matrix A Null wird. Das charakteristische Polynom ist in diesem Fall gegeben durch 1−λ 3 det(A − λ · I) = det 2 4−λ = (1 − λ)(4 − λ) − 6 = λ − 5λ − 2. 2 Damit erhalten wir als Nullstellen des charakteristischen Polynoms die Werte 5 5 33 33 . λ1 = + und λ1 = − 2 4 2 4 D. Horstmann: Oktober 2016 115 Eigenwerte und Eigenvektoren Die Nullstellen λi des charakteristischen Polynoms der Matrix A bezeichnet man als die Eigenwerte der Matrix. Für diese Werte existieren also Vektoren xλi , die von 0 verschieden sind und die die entsprechende Gleichung A · x λi = λ i · x λi (14) lösen. Einen derart besonderen Spaltenvektoren xλi , der für einen festen Eigenwert λi die entsprechende Gleichung (14) löst, nennt man dann einen zum Eigenwert λi gehörenden Eigenvektor. Zu einem Eigenwert kann es auch mehr als einen Eigenvektor geben und offensichtlich ist mit xλi auch jedes Vielfache dieses Vektors (c · xλi ) erneut Eigenvektor zum Eigenwert λi. D. Horstmann: Oktober 2016 116 Eigenwerte und Eigenvektoren Beispiel 19. Wir suchen Lösungen der Gleichungssysteme (1 − λ1)x1 + 3x2 = 0 2x1 + (4 − λ1)x2 = 0 (1 − λ2)y1 + 3y2 = 0 2y1 + (4 − λ2)y2 = 0. und D. Horstmann: Oktober 2016 117 Eigenwerte und Eigenvektoren Setzt man in diese Gleichungssysteme die im vorangegangenen Beispiel gefundenen Werte für λ1 und λ2 ein, so erhält man die Gleichungssysteme 5 33 x1 + 3x2 = 0 1− − 2 4 5 33 2x1 + 4 − − x2 = 0 2 4 und 1− 2y1 + D. Horstmann: Oktober 2016 5 + 2 4− 33 4 5 + 2 y1 + 3y2 33 4 = 0 = 0. y2 118 Eigenwerte und Eigenvektoren Betrachten wir zunächst das System: 33 5 x1 + 3x2 1− − 2 4 5 33 x2 2x1 + 4 − − 2 4 = 0 = 0. Man sieht leicht, dass man in Wirklichkeit nur die Gleichung 33 5 x2 = 0 2x1 + 4 − − 2 4 vorliegen hat, die für x1 die nachfolgende Gleichung ergibt: √ (−3 + 33) x1 = x2 4 D. Horstmann: Oktober 2016 119 Eigenwerte und Eigenvektoren Wenn wir nun x2 gleich dem Parameter m setzen, so sehen wir, dass für alle m ∈ IR Lösungen des Systems durch √ (−3 + 33) x2 = m und x1 = m 4 gegeben sind. Wenn wir m = 1 setzen, erhalten wir als einen Eigenvektor zum Eigenwert λ1 den Vektor √ x λ1 = D. Horstmann: Oktober 2016 −3+ 33 4 1 . 120 Eigenwerte und Eigenvektoren Das analoge Vorgehen bei dem Gleichungssystem 5 33 y1 + 3y2 1− + 2 4 5 33 y2 2y1 + 4 − + 2 4 führt uns hier mit yλ2 = √ −3− 33 4 = 0 = 0 1 auf einen zum Eigenwert λ2 gehörenden Eigenvektor. D. Horstmann: Oktober 2016 121 Eigenwerte und Eigenvektoren Beispiel 20. Es sei die Matrix 3 1 A= −2 5 gegeben. Wir wollen nun die Eigenwerte dieser Matrix bestimmen. Hierbei erhalten wir die charakteristische Gleichung 3−λ 1 det = (3 − λ)(5 − λ) + 2 −2 5−λ = 2 λ − 8λ + 17 = 0 Mit Hilfe der p − q−Formel berechnet man nun die Nullstellen √ λ1 = 4 + −1 √ λ2 = 4 − −1. √ Aber macht der Ausdruck −1 überhaupt Sinn? D. Horstmann: Oktober 2016 122 Komplexe Zahlen Definition 7. Da keine reelle Zahl existiert, deren Quadrat -1 ist, definieren wir die imaginäre Einheit i durch die Gleichung 2 i = −1. Als die Menge aller komplexen Zahlen C definieren wir alle Zahlen z , die sich in der Form z =a+i·b darstellen lassen. Hierbei sind a und b reelle Zahlen und i die imaginäre Einheit. Die Zahl a bezeichnet man als Realteil und die Zahl b als Imaginärteil der komplexen Zahl z und schreibt hierfür Re(z) = a und Im(z) = b. D. Horstmann: Oktober 2016 123 Komplexe Zahlen Die komplexen Zahlen kann man mit Vektoren in der Ebene identifizieren. Identifiziert man komplexe Zahlen mit Vektoren in der in der Graphik dargestellten Ebene, so sieht man (mit Hilfe des Satzes von Pythagoras, der allen aus der Schule bekannt sein dürfte), dass die Definition des Betrags einer komplexen Zahl, die durch |z| := 2 (Re(z)) + (Im(z)) 2 gegeben ist, sinnvoll ist. Der Betrag einer komplexen Zahl entspricht also der Länge des Vektors in der komplexen Ebene. Definition 8. Die zu der komplexen Zahl z = a + ib konjugierte komplexe Zahl z ist definiert als z = a − ib. D. Horstmann: Oktober 2016 124 Rechnen mit komplexen Zahlen Für das Rechnen mit komplexen Zahlen sind die nachfolgenden Rechenvorschriften zu beachten: 1. Addition: Zwei komplexe Zahlen werden miteinander addiert, indem man jeweils die Realteile und Imaginärteile addiert, d.h. für z1 = a + ib und z2 = c + id gilt z1 + z2 = (Re(z1) + Re(z2)) + i (Im(z1) + Im(z2)) = (a + c) + i(b + d). 2. Multiplikation: Zwei komplexe Zahlen werden miteinander multipliziert, indem man die übliche Multiplikation von “Klammern” anwendet, d.h. für z1 = a + ib und z2 = c + id gilt 2 z1 · z2 = (a + ib) · (c + id) = ac + iad + ibc + (i) db = ac − bd + i(ad + bc). D. Horstmann: Oktober 2016 125 3. Division: Zwei komplexe Zahlen werden dividiert, indem man den vorliegenden Bruch mit der zum Nenner konjugierten komplexen Zahl erweitert und den resultierenden Bruch in Realteil und Imaginärteil umsortiert. D.h. für z1 = a + ib und z2 = c + id = 0 gilt: z1 z2 = = = D. Horstmann: Oktober 2016 a + ib a + ib c − id = · c + id c + id c − id ac + bd + i(bc − ad) (a + ib)(c − id) = c2 + d 2 c2 + d 2 ac + bd bc − ad + i . c2 + d2 c2 + d2 126 Rechnen mit komplexen Zahlen Abbildung 1: Die Addition und die Subtraktion von komplexen Zahlen dargestellt in der komplexen Ebene (Gaußschen Zahlenebene). D. Horstmann: Oktober 2016 127