Mathematischer Vorkurs - Mathematik, TU Dortmund
Werbung

Mathematischer Vorkurs
Mathematischer Vorkurs – TU Dortmund
Seite 1 / 157
Mengen
Kapitel 1 – Mengen
Mathematischer Vorkurs – TU Dortmund
Seite 2 / 157
Mengen
1.1 Definition: Mengen
Unter einer Menge verstehen wir eine Zusammenfassung von Objekten zu
einem Ganzen.
Diese Objekte heißen dann Elemente der Menge.
Beschreibung von Mengen durch ...
... Aufzählen aller Elemente mit Mengenklammern {. . .}.
... Angabe einer Eigenschaft E, die die Elemente beschreibt:
{x | x hat die Eigenschaft E}
Mathematischer Vorkurs – TU Dortmund
Seite 3 / 157
Mengen
Beispiele:
Die Menge der natürlichen Zahlen
:= {1, 2, 3, . . .}.
N
Die Menge der natürlichen Zahlen mit Null
0 := {0, 1, 2, 3, . . .}.
N
Für alle natürlichen Zahlen k > 0 definieren wir
N≥k := {k, k + 1, k + 2, . . .}.
Die Menge der ganzen Zahlen:
Z := {. . . , −2, −1, 0, 1, 2, . . .}.
Die Menge
der (gekürzten) Brüche:
n a der rationalen Zahlen als Menge
o
:=
a, b ganze Zahlen und b > 0 .
b
Die Menge der reellen Zahlen: .
Q
R
Die Menge der nicht negativen reellen Zahlen:
Die Menge der komplexen Zahlen:
C.
R+ = {x ∈ R | x > 0}.
Die leere Menge ∅ ist die Menge, die kein Element enthält.
Mathematischer Vorkurs – TU Dortmund
Seite 4 / 157
Mengen
Schreibweisen:
Ist a ein Element der Menge M , so schreiben wir kurz a ∈ M .
Ist a kein Element der Menge M , so schreiben wir kurz a 6∈ M .
Beispiel: 1 ∈
N, 2 ∈ Z aber −3 6∈ N.
Mathematischer Vorkurs – TU Dortmund
Seite 5 / 157
Mengen
1.2 Definition: Mengenoperationen
Es seien M und N Mengen.
1. Die Vereinigungsmenge M ∪ N ist die Menge der Elemente, die in M
oder in N enthalten sind. Also M ∪ N = {x | x ∈ M oder x ∈ N }.
2. Die Schnittmenge M ∩ N ist die Menge der Elemente, die in M und
in N enthalten sind. Also M ∩ N = {x | x ∈ M und x ∈ N }.
3. M heißt Teilmenge von N , wenn alle Elemente die in M enthalten sind
auch in N enthalten sind. Wir schreiben dann M ⊂ N oder N ⊃ M .
4. Die Differenzmenge N \ M ist die Menge der Elemente, die in N
enthalten sind, aber nicht in M , also
N \ M := {x | x ∈ N und x 6∈ M }.
5. Ist M ⊂ N so ist das Komplement von M (bezüglich N ) durch
M c := {x | x ∈ N und x 6∈ M } definiert.
Mathematischer Vorkurs – TU Dortmund
Seite 6 / 157
Mengen
1.3 Bemerkung
Es gilt in jedem Fall ∅ ⊂ M ⊂ M .
In 4. muss M keine Teilmenge von N sein. Ist zum Beispiel
M ∩ N = ∅, so ist N \ M = N und M \ N = M .
Ist aber M ⊂ N so ist N \ M = M c und M \ N = ∅.
Zwei Mengen M und N sind gleich, wenn die eine jeweils eine
Teilmenge der anderen ist. Also M = N genau dann, wenn M ⊂ N
und N ⊂ M .
Mathematischer Vorkurs – TU Dortmund
Seite 7 / 157
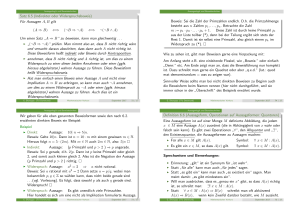
Mengen
Graphisch kann man die Mengenoperationen gut mit Hilfe von
Venn-Diagrammen darstellen:
M
N
N
M
N ⊂M
M ∪N
N
M
M ∩N
N
M
M \N
Mathematischer Vorkurs – TU Dortmund
Seite 8 / 157
Mengen
1.4 Satz: Rechenregeln für Mengenoperationen
1
M ∪ N = N ∪ M und M ∩ N = N ∩ M .
2
(M ∪ N ) ∪ P = M ∪ (N ∪ P ) und (M ∩ N ) ∩ P = M ∩ (N ∩ P ).
3
M ∪ (N ∩ P ) = (M ∪ N ) ∩ (M ∪ P ).
4
M ∩ (N ∪ P ) = (M ∩ N ) ∪ (M ∩ P ).
5
(M c )c = M .
6
(M ∪ N )c = M c ∩ N c und (M ∩ N )c = M c ∪ N c .
Mathematischer Vorkurs – TU Dortmund
Seite 9 / 157
Mengen
1.5 Definition: Kartesisches Produkt
1. Das kartesische Produkt zweier Mengen M und N wird mit M × N
bezeichnet und enthält als Elemente die geordneten Paare (m, n) mit
m ∈ M und n ∈ N . Also:
M × N = {(m, n) | m ∈ M und n ∈ N } .
Ist M ⊂ G1 und N ⊂ G2 so kann man das kartesische Produkt wie
folgt darstellen:
G2
N
MxN
M
G1
Mathematischer Vorkurs – TU Dortmund
Seite 10 / 157
Mengen
1.5 Definition: Kartesisches Produkt[cont.]
2. Das kartesische Produkt mehrerer Mengen M1 , . . . , Mk wird analog
definiert.
Z.B. ist 3 = × × = {(x, y, z)|x, y, z ∈ }
R
R R R
R
Mathematischer Vorkurs – TU Dortmund
Seite 11 / 157
Mengen
1.6 Definition: Quantoren
Ist A eine Eigenschaft, die für die Elemente einer Menge M sinnvoll ist, so
schreiben wir
∀x ∈ M : A(x) ,
wenn jedes Element aus M die Eigenschaft A hat – in Worten: für alle
x ∈ M gilt A(x) und
∃x ∈ M : A(x) ,
wenn es mindestens ein Element aus M gibt, das die Eigenschaft A hat –
in Worten: es gibt ein x ∈ M mit A(x).
Mathematischer Vorkurs – TU Dortmund
Seite 12 / 157
Zahlen
Kapitel 2 – Zahlen
Mathematischer Vorkurs – TU Dortmund
Seite 13 / 157
Zahlen
Uns bisher bekannte Zahlenbereiche sind
N ⊂ Z ⊂ Q ⊂ R |(⊂{zC}) .
später
2.1 Definition: Rationale und irrationale Zahlen
1.
ist die Menge der Dezimalbrüche.
R
2. Q ist die Menge der abbrechenden oder periodischen Dezimalbrüche.
Dabei wird allerdings die Periode 9 ausgeschlossen, indem man die
Zahl n, a1 a2 . . . ak−1 ak 9 mit der Zahl n, a1 a2 . . . ak−1 bk identifiziert
mit bk = ak + 1. Dabei ist n ∈ 0 , a1 , a2 , . . . , ak−1 ∈ {0, 1, . . . , 9},
ak ∈ {0, 1, . . . , 8}.
N
R Q
3. Die Elemente der Menge \ , also die nicht-abbrechenden und
nicht-periodischen Dezimalbrüche, heißen irrationale Zahlen.
Mathematischer Vorkurs – TU Dortmund
Seite 14 / 157
Zahlen
Beispiele irrationaler Zahlen:
1. Die Länge der Diagonale eines
√ Quadrates der Seitenlänge 1 ist
irrational. Diese Länge ist 2 = 1, 414213562 . . .
2. Der Umfang eines Kreises mit Durchmesser 1 ist irrational. Diese
Länge ist π = 3, 141592654 . . .
3. Die Eulersche Zahl e = 2, 718281828 . . . ist irrational.
2.2 Definition: Rechenoperationen
Sind x, y ∈
y 6= 0 auch
Rx so sind die Rechenoperationen x + y, x − y, xy und für
y
erklärt.
Mathematischer Vorkurs – TU Dortmund
Seite 15 / 157
Zahlen
2.3 Satz: Rechenregeln
1. x + y = y + x und xy = yx (Kommutativgesetze)
2. x + (y + z) = (x + y) + z und x(yz) = (xy)z (Assoziativgesetze)
3. x(y + z) = xy + xz (Distributivgesetz)
Als direkte Konsequenz erhalten wir die drei Binomischen Formeln
4. (a + b)2 = a2 + 2ab + b2 ,
(a − b)2 = a2 − 2ab + b2 und
(a + b)(a − b) = a2 − b2 .
Mathematischer Vorkurs – TU Dortmund
Seite 16 / 157
Zahlen
2.4 Definition: Kurzschreibweisen für Summen und Produkte
Sind m, n ∈ 0 mit m ≤ n und am , am+1 , . . . , an ∈ so schreiben wir
N
1.
2.
n
X
k=m
n
Y
R
ak = am + am+1 + . . . + an und
ak = am · am+1 · . . . · an
k=m
Dabei kann der Laufindex eine beliebige Variable sein, etwa
n
n
X
X
ak =
aj .
k=m
j=m
Es gelten die folgenden Vereinbarungen wenn m > n ist
n
X
k=m
ak = 0
und
n
Y
ak = 1
k=m
Mathematischer Vorkurs – TU Dortmund
Seite 17 / 157
Zahlen
Rechenregeln und Beispiele:
a·
n
X
ak =
k=m
n
X
k=m
n
Y
n
X
(a · ak )
k=m
ak +
n
X
bk =
k=m
ak ·
k=m
n
Y
k=m
n
X
(ak + bk ) und
k=m
n
Y
bk =
(ak · bk ).
k=m
n
X
Indexverschiebung:
n+t
X
ak =
k=m
ak−t .
k=m+t
n
X
Arithmetische Summenformel:
k=
k=1
geometrische Summenformel:
q 6= 1.
n
X
k=0
qk =
n(n + 1)
.
2
1 − q n+1
für eine reelle Zahl
1−q
Mathematischer Vorkurs – TU Dortmund
Seite 18 / 157
Zahlen
2.5 Definition: Potenzen
Für a ∈
R und n ∈ N0 setzen wir an :=
n
Y
a.
k=1
Insbesondere gilt also a0 = 1 und 00 = 1 aber 0n = 0 für n > 0.
1
Für a ∈ \ {0} und n ∈ 0 setzen wir a−n := n .
a
a ∈ heißt die Basis und n ∈ der Exponent der Potenz an .
R
R
N
Z
2.6 Potenzregeln
Für n, m ∈
Z gilt:
1
am an = an+m und an bn = (ab)n sowie
2
(am )n = amn
falls die Ausdrücke definiert sind.
Mathematischer Vorkurs – TU Dortmund
Seite 19 / 157
Zahlen
2.7 Definition: Quadratwurzel
Sind a, b ∈
R und b2 = a so definieren wir
√
(
b
falls b ≥ 0
a :=
−b falls b < 0
Die stets nicht-negative Zahl
√
a heißt Quadratwurzel von a.
2.8 Existenz der Quadratwurzel
Die Gleichung x2 = a besitzt ...
... für a < 0 keine reelle Lösung,
... für a = 0 die eindeutige (reelle) Lösung x = 0 und
√
√
... für a > 0 die zwei (reellen) Lösungen x1 = a und x2 = − a.
Mathematischer Vorkurs – TU Dortmund
Seite 20 / 157
Zahlen
Der Satz 2.7 lässt sich noch verallgemeinern:
2.9 Satz: Höhere Wurzeln
1 Ist n eine natürliche ungerade Zahl, dann hat die Gleichung xn = a
√
genau eine reelle Lösung und diese bezeichnen wir mit x = n a.
2 Ist n eine natürliche gerade Zahl mit n 6= 0, dann hat die Gleichung
xn = a ...
... für a < 0 keine reelle Lösung,
... für a = 0 die eindeutige (reelle) Lösung x = 0 und
√
... für a √
> 0 die zwei reellen Lösungen, die wir mit x1 = n a und
x2 = − n a bezeichnen.
Mathematischer Vorkurs – TU Dortmund
Seite 21 / 157
Zahlen
2.10 Bemerkung
√
1
Wir setzen nun a n := n a für a ≥ 0 und n 6= 0, und definieren(!)
m
1 m
a n := a n . Dann kann man zeigen, dass die Rechenregeln aus Satz 2.6
weiterhin gültig bleiben.
Somit haben wir das Potenzieren von ganzen auf rationale Exponenten
erweitert.
Mathematischer Vorkurs – TU Dortmund
Seite 22 / 157
Zahlen
2.11 Satz: p-q-Formel
Es sei D := p2 − 4q. Dann besitzt die quadratische Gleichung
x2 + px + q = 0 ...
p
... die eindeutige (reelle) Lösung x = − falls D = 0,
2 √
√
p+ D
p− D
... die zwei (reellen) Lösungen x1 = −
und x2 = −
2
2
falls D > 0, und
... keine reelle Lösung falls D < 0.
Die Zahl D heißt Diskriminante der quadratischen Gleichung.
Mathematischer Vorkurs – TU Dortmund
Seite 23 / 157
Zahlen
2.12 Definition: Fakultät und Binomialkoeffizient
1 Für natürliche Zahlen n ∈
0 ist die Fakultät definiert als
N
n! :=
n
Y
k.
k=1
Also gilt insbesondere 0! = 1 und (n + 1)! = n! · (n + 1).
2
N
Für zwei natürliche Zahlen k, n ∈ 0 mit k ≤ n ist der
Binomialkoeffizient definiert als
n
n(n − 1) · · · (n − k + 1)
n!
=
:=
k
k!(n − k)!
k!
Mathematischer Vorkurs – TU Dortmund
Seite 24 / 157
Zahlen
2.13 Satz: Eigenschaften der Binomialkoeffizienten
n
n
n
n
=
= 1 und
=
.
0
n
k
n−k
n
n
n+1
+
=
(Additionstheorem).
k
k+1
k+1
Mathematischer Vorkurs – TU Dortmund
Seite 25 / 157
Zahlen
Wegen des Additiontheorems lassen sich die Binomialkoeffizienten im
Pascalschen Dreieck anordnen:
n
n
k
1
0
1
1
1
1
2
1
2
1
3
3
1
3
1
4
6
4
1 4
..
.
2.14 Binomischer Lehrsatz
Für x, y ∈ und n ∈ 0 gilt
R
N
n X
n k n−k
(x + y) =
x y
k
n
k=0
Mathematischer Vorkurs – TU Dortmund
Seite 26 / 157
Ordnung und Betrag
Kapitel 3 – Ordnung und Betrag
Mathematischer Vorkurs – TU Dortmund
Seite 27 / 157
Ordnung und Betrag
3.1 Definition: Ordnung
Jede reelle Zahl x hat genau eine der folgenden drei Eigenschaften:
x < 0 (negativ), x = 0 (Null) und x > 0 (positiv).
Wir definieren x > y durch x − y > 0 und x ≥ y durch x − y > 0 oder
x − y = 0.
Analog werden x < y und x ≤ y definiert.
Damit gilt für alle x, y ∈
R entweder(!) x < y oder x = y oder x > y.
Die Zeichen ≤, ≥, <, > und = heißen Ordnungszeichen.
Mathematischer Vorkurs – TU Dortmund
Seite 28 / 157
Ordnung und Betrag
Mit Hilfe der Ordnungszeichen definieren wir spezielle Teilmengen von
Seien dazu a, b ∈ mit a < b.
R
R.
3.2 Definition: Intervalle
Beschränkte Intervalle
[a, b] := {x ∈
möglich).
R | a ≤ x ≤ b} (Abgeschlossenes Intervall, auch a = b
R | a < x < b} (Offenes Intervall).
[a, b[ := {x ∈ R | a ≤ x < b} oder ]a, b] := {x ∈ R | a < x ≤ b}
]a, b[ := {x ∈
(Halboffene Intervalle).
Unbeschränkte Intervalle:
R | a ≤ x} und ] − ∞, b] := {x ∈ R | x ≤ b}
]a, ∞[ := {x ∈ R | a < x} und ] − ∞, b[ := {x ∈ R | x < b}
] − ∞, ∞[ := R
[a, ∞[ := {x ∈
Mathematischer Vorkurs – TU Dortmund
Seite 29 / 157
Ordnung und Betrag
3.3 Rechenregeln
Es seien x, y, z ∈
R. Dann gilt
1
Ist x < y und y < z, dann gilt x < z.
2
Ist x ≤ y und y ≤ x, so ist x = y.
3
Ist x < y dann ist x + z < y + z.
4
Ist x > 0 und y > 0, so ist auch xy > 0.
5
Ist z > 0 und x < y, so ist xz < yz.
6
Ist z < 0 und x < y, so ist xz > yz.
7
Ist 0 < x < y, so gilt
1
x
>
1
y
> 0.
Mathematischer Vorkurs – TU Dortmund
Seite 30 / 157
Ordnung und Betrag
Aus den Rechenregeln 3.3 folgt:
3.4 Satz: Vorzeichen von Produkten
Es seien x1 , . . . , xn ∈ . Dann gilt:
n
Y
xi = 0 ist gleichbedeutend damit, dass es mindestens ein
R
i=1
j ∈ {1, . . . , n} gibt mit xj = 0.
n
Y
xi > 0 ist gleichbedeutend damit, dass nur eine gerade Anzahl der
i=1
Faktoren xj negativ ist.
Mathematischer Vorkurs – TU Dortmund
Seite 31 / 157
Ordnung und Betrag
Die Rechenregeln 3.3 liefern für das Rechnen mit Ungleichungen:
3.5 Bemerkung
Die Lösungsmenge einer Ungleichung ändert sich nicht, wenn wir auf
beiden Seiten ...
... eine Zahl addieren.
... mit einer positiven Zahl multiplizieren.
... eine streng monoton steigende Funktion anwenden. (Genaueres
dazu folgt später.)
Beispiele streng monotoner Funktionen:
Die Wurzelfunktion auf [0, ∞[.
Potenzfunktion mit ungeradem Exponenten auf
und mit geradem
Exponenten auf [0, ∞[.
Die Exponentialfunktion auf
und die Logarithmusfunktion auf
(0, ∞).
R
R
Mathematischer Vorkurs – TU Dortmund
Seite 32 / 157
Ordnung und Betrag
3.6 Definiton: Betrag
Der Betrag einer reellen Zahl x ist definiert als der Abstand zu 0 und wird
mit |x| bezeichnet. Also
(
x
falls x ≥ 0
|x| :=
−x falls x < 0
Für x, y ∈
R ist |x − y| der Abstand von x und y.
Mathematischer Vorkurs – TU Dortmund
Seite 33 / 157
Ordnung und Betrag
3.7 Eigenschaften des Betrags
1. |x| = 0 ist gleichbedeutend mit x = 0.
2. |x| = | − x|.
3. −|x| ≤ x ≤ |x| mit Gleichheit an genau einer Stelle, wenn x 6= 0.
4. |xy| = |x||y|.
5. |x + y| ≤ |x| + |y|.
6. | |x| − |y| | ≤ |x − y|.
√
7. x2 = |x|.
Mathematischer Vorkurs – TU Dortmund
Seite 34 / 157
Ordnung und Betrag
3.8 Satz: Quadratische Ungleichungen
Es gilt
√
p D
x + px + q < 0 ⇔ x + <
,
2
2
2
wobei D = p2 − 4q die Diskriminante ist. Ist D < 0 so hat die Ungleichung
keine reelle Lösung. Außerdem gilt
√
D
p 2
,
x + px + q > 0 ⇔ x + >
2
2
wobei im Fall D < 0 die Lösungsmenge ganz
R ist.
Mathematischer Vorkurs – TU Dortmund
Seite 35 / 157
Abbildungen und Funktionen
Kapitel 4 – Abbildungen und Funktionen
Mathematischer Vorkurs – TU Dortmund
Seite 36 / 157
Abbildungen und Funktionen
4.1 Definition: Abbildung
Es seien D und W Mengen. Eine Abbildung f von D nach W ist eine
Vorschrift, die jedem Element x ∈ D genau ein Element f (x) ∈ W
zuordnet.
f (x) heißt das Bild von x unter f
D heißt der Definitions- und W der Wertebereich (manchmal besser
Wertevorrat.
Ist nun f : D → W eine Abbildung, so heißt die Menge der Elemente in
W , die von f getroffen wird, die Bildmenge von f und wird mit f (D)
bezeichnet. Es gilt
f (D) := {y ∈ W | ∃x ∈ D : y = f (x)} = {f (x) | x ∈ D} ⊂ W .
Mathematischer Vorkurs – TU Dortmund
Seite 37 / 157
Abbildungen und Funktionen
4.2 Definition, Urbild, Graph
Ist U ⊂ W eine Teilmenge, so nennt man die Menge aller Elemente von D
deren Bild in U liegt, das Urbild von U . Dies wird mit f −1 (U ) bezeichnet.
Es gilt
f −1 (U ) := {x ∈ D | f (x) ∈ U } ⊂ D .
Die Teilmenge {(x, f (x)) | x ∈ D} ⊂ D × W , bezeichnet man als Graph
der Abbildung f .
Mathematischer Vorkurs – TU Dortmund
Seite 38 / 157
Abbildungen und Funktionen
4.3 Bemerkung
Zwei Abbildungen f1 : D1 → W1 und f2 : D2 → W2 sind genau dann
gleich, wenn D1 = D2 , W1 = W2 und f1 (x) = f2 (x) für alle x ∈ D1 .
4.4 Definition: identische Abbildung
Es sei f : D → D mit f (x) := x für alle x ∈ D. Diese Abbildung heißt
identische Abbildung oder Identität auf D und wird hier mit idD
bezeichnet.
Sprechweise:
Oft wird der Begriff Funktion parallel zum Begriff Abbildung benutzt.
Mathematischer Vorkurs – TU Dortmund
Seite 39 / 157
Abbildungen und Funktionen
4.5 Definition: Polynome
N
R R
Es sei n ∈ und a0 , a1 , . . . , an ∈
p : → mit
p(x) =
n
X
R mit an 6= 0. Dann heißt die Funktion
ak xk = an xn + an−1 xn−1 + . . . + a1 x + a0
k=0
ein Polynom.
Die Zahl grad(p) := n heißt der Grad, die ak heißen die Koeffizienten und
speziell an der Leitkoeffizient von p.
Eine Zahl x0 ∈ mit p(x0 ) = 0 heißt Nullstelle von p.
R
Mathematischer Vorkurs – TU Dortmund
Seite 40 / 157
Abbildungen und Funktionen
4.6 Satz: Faktorisierung
Es sei p ein Polynom und x0 eine Nullstelle. Dann gibt es ein Polynom q
mit grad(q) = grad(p) − 1, so dass p(x) = (x − x0 )q(x).
Die Koeffizienten des Polynoms q aus der Faktorisierung lassen sich durch
Polynomdivision oder mit Hilfe des Hornerschemas bestimmen.
4.7 Hornerschema
Das Hornerschema kann dazu benutzt werden, den Funktionswert eines
Polynoms p an einer beliebigen Stelle x0 zu bestimmen.
Man erhält zusätzlich die Koeffizienten eines Polynoms q, dessen Grad um
Eins kleiner ist, als der von p, und das
p(x) = (x − x0 )q(x) + p(x0 )
erfüllt.
Mathematischer Vorkurs – TU Dortmund
Seite 41 / 157
Abbildungen und Funktionen
Beschreibung des Hornerschemas:
Zunächst schreiben wir die Koeffizienten von p in die erste Zeile einer
Tabelle und den Wert 0 unter an . Dann führt man dann von links nach
rechts in der Tabelle immer wieder zwei Schritte durch:
1. Addiere die Zahlen der ersten und zweiten Zeile und schreibe sie in die
dritte Zeile.
2. Der zuletzt berechnete Wert wird mit x0 multipliziert und in die
zweite Zeile der nächsten Spalte eingetragen.
Schließlich gelangt man zu folgendem Abschlußschema:
an
+
0
=
cn−1
an−1
an−2
···
a1
a0
+
+
+
+
cn−1 x0
cn−2 x0
···
c1 x0
c0 x0
%
=
%
=
%
% = % =
cn−2
cn−3
...
c0
c−1
Mathematischer Vorkurs – TU Dortmund
Seite 42 / 157
Abbildungen und Funktionen
Dann ist an xn + an−1 xn−1 + · · · + a1 x + a0 =
(x − x0 )(cn−1 xn−1 + cn−2 xn−2 + · · · c1 x + c0 ) + c−1 .
Ist x0 eine Nullstelle des Polynoms p, so hat man eine Polynomdivision
durchgeführt:
p(x) = (x − x0 )q(x) mit q(x) = cn−1 xn−1 + cn−2 xn−2 + · · · c1 x + c0 .
Man kann nun 4.7 auf q anwenden und so nach und nach Nullstellen von p
abspalten.
Hilfreich beim Nullstellensuchen:
Hat p nur ganzzahlige Koeffizienten, und ist der Leitkoeffizient an = 1, so
sind alle rationalen Nullstellen sogar ganz und sie sind Teiler des
Koeffizienten a0 . .
Mathematischer Vorkurs – TU Dortmund
Seite 43 / 157
Abbildungen und Funktionen
4.8 Definition: Rationale Funktionen
p(x)
q(x)
| q(x) 6= 0}.
Es seien p und q Polynome. Dann heißt die Funktion f mit f (x) :=
rationale Funktion. Ihr Definitionsbereich ist D = {x ∈
R
4.9 Definition: Potenzfunktion
Es sei q ∈ eine rationale Zahl. Dann ist die Potenzfunktion definiert
durch
Q
i) fq : ]0, ∞[ → ]0, ∞[, fq (x) = xq , falls q < 0,
ii) fq : [0, ∞[ → [0, ∞[, fq (x) = xq , falls q > 0.
Bemerkung: Später werden wir die Potenzfunktionen auch für irrationale
Exponenten erklären.
Mathematischer Vorkurs – TU Dortmund
Seite 44 / 157
Abbildungen und Funktionen
4.10 Definition: Einschränkung und Fortsetzung
Es seien D1 ⊂ D2 und f1 : D1 → W , f2 : D2 → W zwei Abbildungen mit
f1 (x) = f2 (x) für alle x ∈ D1 .
Dann heißt f1 Einschränkung von f2 und f2 Fortsetzung von f1 . Man
schreibt auch f1 = f2 |D1 .
4.11 Definition: Verkettung von Abbildungen
Es seien f : D → U und g : V → W Abbildungen und es gelte U ⊂ V .
Dann ist die Verkettung g ◦ f : D → W definiert durch
(g ◦ f )(x) := g(f (x)) .
Statt Verkettung sagt man auch Hintereinanderausführung oder
Komposition und man liest g ◦ f als “g nach f ”.
Mathematischer Vorkurs – TU Dortmund
Seite 45 / 157
Abbildungen und Funktionen
4.12 Definition: Umkehrabbildung
Es seien f : D → W und g : W → D Abbildungen mit den Eigenschaften
(1) g ◦ f = idD und (2) f ◦ g = idW .
Dann heißen f und g Umkehrabbildungen voneinander und wir schreiben
g = f −1 bzw. f = g −1 . Man sagt dann auch f (und natürlich auch g) ist
invertierbar.
Eine Abbildung f : D → W hat genau dann eine Umkehrabbildung, wenn
die Gleichung f (x) = y für jedes y ∈ W genau eine Lösung x ∈ D hat.
Die Umkehrabbildung ist dann (für dieses (x, y)-Paar) durch f −1 (y) = x
definiert.
R
Sind D und W Teilmengen von , so erhält man den Graphen der
Umkehrfunktion f −1 aus dem Graphen von f durch Spiegelung an der
winkelhalbierenden.
Mathematischer Vorkurs – TU Dortmund
Seite 46 / 157
Abbildungen und Funktionen
4.13 Definition: Monotonie
Es sei I ⊂ und f : I → eine Funktion. Dann heißt f ...
R
R
1
... monoton wachsend, wenn für alle x1 , x2 ∈ I mit x1 < x2 gilt
f (x1 ) ≤ f (x2 ).
2
... streng monoton wachsend, wenn für alle x1 , x2 ∈ I mit x1 < x2 gilt
f (x1 ) < f (x2 ).
3
... monoton fallend, wenn für alle x1 , x2 ∈ I mit x1 < x2 gilt
f (x1 ) ≥ f (x2 ).
4
... streng monoton fallend, wenn für alle x1 , x2 ∈ I mit x1 < x2 gilt
f (x1 ) > f (x2 ).
Beispiel: Die Potenzfunktionen fq : [0, ∞[ → [0, ∞[ sind streng monoton
steigend.
Mathematischer Vorkurs – TU Dortmund
Seite 47 / 157
Trigonometrie
Kapitel 5 – Trigonometrie
Mathematischer Vorkurs – TU Dortmund
Seite 48 / 157
Trigonometrie
Winkel werden in Grad
oder im Bogenmaß
(auch Rad) angegeben:
360◦ =2π.
b
Schenkel
Scheitel S
Winkelbereich
α
y
cot α
1
r=1
sin α
Durch diese Betrachtungen am Einheitskreis
werden vier Funktionen
definiert.
tan α
α
cos α
1
x
Mathematischer Vorkurs – TU Dortmund
Seite 49 / 157
Trigonometrie
5.1 Definition: Winkelfunktionen
Name
Sinus
sin
Cosinus
cos
Tangens
tan
Cotangens
cot
D
R
R
W
[−1, 1]
R \ { 2k+1
2 π | k ∈ Z}
R \ {kπ | k ∈ Z}
[−1, 1]
R
R
Die Graphen der Sinus- und Cosinusfunktionen
y
y = sin x
π
y = cos x
2π x
Mathematischer Vorkurs – TU Dortmund
Seite 50 / 157
Trigonometrie
Die Graphen der Tangens- und Cotangensfunktionen:
y
y = tan x
y = cot x
1
π
4
π
2
3π
4
π
5π
4
3π
2
x
Mathematischer Vorkurs – TU Dortmund
Seite 51 / 157
Trigonometrie
5.2 Interpretation am rechtwinkligen Dreieck
C
Mit diesen Bezeichnungen gilt dann
b
a
A
α
c
sin α =
a
,
b
cos α =
c
b
und
tan α =
a
c
B
Mathematischer Vorkurs – TU Dortmund
Seite 52 / 157
Trigonometrie
5.3 Definition: Periodische Funktionen
Es sei T > 0. Eine Funktion f : → heißt T -periodisch, wenn
f (x + T ) = f (x) für alle x ∈ .
R
R R
5.4 Definition: Symmetrie von Funktionen
Es sei I ⊂
heißt ...
R ein um 0 symmetrisches Intervall. Eine Funktion f : I → R
1. ... gerade, wenn f (−x) = f (x) für alle x ∈ I.
2. ... ungerade, wenn f (−x) = −f (x) für alle x ∈ I.
Mathematischer Vorkurs – TU Dortmund
Seite 53 / 157
Trigonometrie
5.5 Satz: Eigenschaften der Winkelfunktionen
1. sin sowie cos sind 2π- und tan sowie cot sind π-periodisch.
2. sin(x + π) = − sin x und cos(x + π) = − cos x.
3. sin(x + π2 ) = cos x und cos(x + π2 ) = − sin x.
sin x
1
4. tan x =
und cotx =
.
cos x
tan x
5. cos ist eine gerade Funktion und sin, tan und cot sind ungerade
Funktionen.
R gilt | sin x| ≤ 1 und | cos x| ≤ 1.
7. sin(x) = 0 genau dann, wenn x = kπ mit k ∈ Z.
2k+1
6. Für alle x ∈
cos(x) = 0 genau dann, wenn x =
2
8. sin x +
2
Z
π mit k ∈ .
cos2 x
= 1 der Trigonometrische Pythagoras.
1
1
9. cos2 x =
und sin2 x =
.
2
1 + tan x
1 + cot2 x
Mathematischer Vorkurs – TU Dortmund
Seite 54 / 157
Trigonometrie
5.6 Einschränkungen der Winkelfunktionen
Die folgenden Einschränkungen der Winkelfunktionen benutzt man zur
Definiton von Umkehrfunktionen:
: − π , π → [−1, 1] ist streng monoton wachsend.
1 sin π π
2
2
− ,
2 2
2 cos : [0, π] → [−1, 1] ist streng monoton fallend.
[0,π]
: − π , π → ist streng monoton wachsend.
3 tan − π2 , π2
4
cot
]0,π[
:]0, π[ →
2
2
R
R ist streng monoton fallend.
Mathematischer Vorkurs – TU Dortmund
Seite 55 / 157
Trigonometrie
5.7 Definition: Arcusfunktionen
Die Umkehrfunktionen der Winkelfunktionen werden Arcusfunktionen
genannt und sind
1. arcsin : [−1, 1] → − π2 , π2
2. arccos : [−1, 1] → [0, π]
3. arctan : → − π2 , π2
4. arccot : → 0, π[
R
R
Die Graphen der Arcusfunktionen sehen wie folgt aus (siehe Bemerkung
4.12):
Mathematischer Vorkurs – TU Dortmund
Seite 56 / 157
Trigonometrie
y
y
y = arccos x
y = arcsin x
π
2
π
y = arccot x
π
4
x
− π2
π
2
y = arctan x
1
x
− π2
Mathematischer Vorkurs – TU Dortmund
Seite 57 / 157
Trigonometrie
Beim Rechnen mit den Winkelfunktionen sind folgende Additionstheoreme
sehr nützlich:
5.8 Satz: Additionstheoreme
1 sin(x ± y) = sin x cos y ± sin y cos x
2
3
cos(x ± y) = cos x cos y ∓ sin x sin y
tan x ± tan y
tan(x ± y) =
1 ∓ tan x tan y
Daraus erhält man dann
5.9 Folgerung: Doppelte Winkel
1. sin(2x) = 2 sin x cos x
2. cos(2x) = cos2 x − sin2 x
2 tan x
3. tan(2x) =
1 − tan2 x
4. cos2 x = 12 1 + cos(2x) und sin2 x =
1
2
1 − cos(2x)
Mathematischer Vorkurs – TU Dortmund
Seite 58 / 157
Trigonometrie
Eine kleine Beweisskizze für die Additionstheoreme:
sin x cos y
cos x sin y
x
cos y
cos x cos y
x y
sin x sin y
sin y
1
x+y
cos(x + y)
sin(x + y)
Mathematischer Vorkurs – TU Dortmund
Seite 59 / 157
Trigonometrie
Und nun noch ein paar spezielle Werte der Winkelfunktionen (und mit den
Additionstheoremen und der Periodizität dann natürlich weitere).
x in Grad
0
30◦
45◦
60◦
90◦
x in Rad
0
π
6
π
4
π
3
π
2
sin x
0
1
2
cos x
tan x
cotx
1
√
1
0
√
1
−
1
2
2
3
3
3
√
√
1
2
2
2
√
3
1
1
2
0
−
90◦
√
4
2
√
3
1
3
√
1
3 3
30◦
√
1
2
45◦
√
2
2
60◦
√
3
2
√
1
1
2
0
Eselsbrücke für die Sinus-Werte:
x in Grad
sin x
0
√
0
2
Mathematischer Vorkurs – TU Dortmund
Seite 60 / 157
Differenzierbarkeit
Kapitel 6 – Differenzierbarkeit
Mathematischer Vorkurs – TU Dortmund
Seite 61 / 157
Differenzierbarkeit
Die Begriffe Grenzwert und Stetigkeit werden in Mathematikvorlesungen
genau definiert. Hier sollen lediglich die Ideen verdeutlicht werden.
6.1 Grenzwert und Stetigkeit
Sei I ein Intervall und x0 ein Punkt in I oder ein Randpunkt.
Eine Funktion f : I → hat in x0 den Grenzwert a, wenn sich die Werte
f (x) nur um beliebig wenig von a unterscheiden, wenn x immer näher an
x0 rückt. f (x0 ) selbst wird dabei nicht betrachtet.
Schreibweisen: lim f (x) = a oder f (x) → a für x → x0 .
R
x→x0
Die Funktion f nennt man stetig in x0 ∈ I, wenn lim f (x) = f (x0 ) ist.
x→x0
f ist stetig auf I, wenn f in jedem Punkt von I stetig ist.
Beispiele unstetiger Funktionen sind Funktionen mit Sprungstellen oder
Polstellen.
Mathematischer Vorkurs – TU Dortmund
Seite 62 / 157
Differenzierbarkeit
6.2 Definition: Differenzierbarkeit
Es sei f : I → eine Funktion auf dem offenen Intervall I ⊂
R
R. f heißt ...
1. ... differenzierbar in dem Punkt x0 ∈ I, wenn der Grenzwert des
Differenzenquotienten
lim
x→x0
f (x) − f (x0 )
f (x0 + h) − f (x0 )
= lim
∈
h→0
x − x0
h
R
existiert. Dieser Wert wird dann mit f 0 (x0 ) bezeichnet und heißt die
Ableitung von f an der Stelle x0 .
2. ... differenzierbar auf I, wenn f an jeder Stelle x ∈ I differenzierbar ist.
Mathematischer Vorkurs – TU Dortmund
Seite 63 / 157
Differenzierbarkeit
6.3 Grundlegende Beispiele
f (x)
f 0 (x)
c
0
x
1
x2
2x
xn
n · xn−1 , n ∈
f (x)
1
x
1
xn
N
f 0 (x)
−
−
1
x2
n
xn+1
sin x
cos x
cos x
− sin x
, n∈
Wichtige Beobachtung: In der rechten Spalte taucht
1
x
N
= x−1 nie auf!
Mathematischer Vorkurs – TU Dortmund
Seite 64 / 157
Differenzierbarkeit
Die Ableitung einer Funktion f kann man auch geometrisch interpretieren.
y
T
a
Die Steigung der Tangente T im Punkt
a ist der Grenzwert der Sekantensteigungen.
x
6.4 Tangente
Die Gerade mit der Gleichung
y = f (x0 ) + f 0 (x0 ) · (x − x0 )
heißt Tangente an den Graphen von f im Punkt x0 , f (x0 ) (kurz auch:
Tangente an f in x0 ).
Mathematischer Vorkurs – TU Dortmund
Seite 65 / 157
Differenzierbarkeit
Bemerkung: Differenzierbarkeit in x0 bedeutet also anschaulich, dass sich
die Funktionswerte von f in einer “kleinen Umgebung von x0 ” gut durch
die Werte der Tangente annähern lassen. Man sagt auch: f ist linear
approximierbar. Genauer:
6.5 Satz: Lineare Approximation
R
Es sei f : I → eine Funktion auf dem offenen Intervall I ⊂
x0 ∈ I. Dann sind folgende Aussagen äquivalent:
R und
1. f ist differenzierbar in x0 .
2. Es gibt eine Zahl c ∈
lim φ(x) = 0 und
R und eine Funktion φ : I → R mit
x→x0
f (x) = f (x0 ) + c · (x − x0 ) + φ(x) · (x − x0 ) .
In diesem Fall ist c = f 0 (x0 ).
Mathematischer Vorkurs – TU Dortmund
Seite 66 / 157
Differenzierbarkeit
6.6 Satz
Ist f : I →
R differenzierbar in x0 ∈ I, so ist f auch stetig in x0.
6.7 Definition: Höhere Ableitungen
1. Ist f auf I differenzierbar, so heißt die Funktion f 0 : I →
x 7→ f 0 (x) die Ableitung von f .
R mit
2. Ist f differenzierbar, und f 0 stetig auf I so nennt man f stetig
differenzierbar.
3. Sind f und f 0 differenzierbar auf I, dann nennt man die Funktion
f 00 := (f 0 )0 die zweite Ableitung von f .
4. Ebenso definiert man höhere Ableitungen f 000 , f (4) , . . .
5. f heißt k-mal stetig differenzierbar, wenn f (k) existiert und stetig ist.
Mathematischer Vorkurs – TU Dortmund
Seite 67 / 157
Differenzierbarkeit
6.8 Satz: Differentiationsregeln
1.
Vielfache
(cf )0 = cf 0
2.
Summenregel
(f + g)0 = f 0 + g 0
3.
Produktregel
4.
Quotientenregel
5.
Kettenregel
(f · g)0 = f 0 · g + f · g 0
0
f 0g − f g0
f
=
g
g2
(f ◦ g)0 (x) = f 0 g(x) · g 0 (x)
Insbesondere ist
1. (f 2 )0 (x) = 2 · f (x) · f 0 (x).
2. (f n )0 (x) = n · f n−1 (x) · f 0 (x).
0
1
f 0 (x)
3.
(x) = − 2
.
f
f (x)
Mathematischer Vorkurs – TU Dortmund
Seite 68 / 157
Differenzierbarkeit
6.9 Satz: Ableitung der Umkehrfunktion
Es sei f auf dem Intervall I streng monoton und differenzierbar und es
gelte f 0 6= 0. Dann ist die Umkehrfunktion f −1 differenzierbar auf
J := f (I). Für y = f (x) ∈ J, also x = f −1 (y), gilt dann
0
f −1 (y) =
1
f 0 (x)
.
Mathematischer Vorkurs – TU Dortmund
Seite 69 / 157
Differenzierbarkeit
6.10 Anwendungen
f (x)
f 0 (x)
√
1
√
2 x
1
√
n
n xn−1
x
√
n
x
tan x
arcsin x
arccos x
arctan x
1 + tan2 x =
n∈
N
1
cos2 x
1
1 − x2
1
−√
1 − x2
1
1 + x2
√
Mathematischer Vorkurs – TU Dortmund
Seite 70 / 157
Anwendungen der Differentialrechnung
Kapitel 7 – Anwendungen der Differentialrechnung
Mathematischer Vorkurs – TU Dortmund
Seite 71 / 157
Anwendungen der Differentialrechnung
7.1 Satz: Mittelwertsatz der Differentialrechnung
Es sei f auf [a, b] stetig und auf ]a, b[ differenzierbar. Dann gibt es ein
x0 ∈]a, b[ mit
f (b) − f (a)
f 0 (x0 ) =
.
b−a
7.2 Folgerung
Sei f auf [a, b] stetig und auf ]a, b[ differenzierbar. Dann gilt:
1
2
3
Ist f 0 (x) ≥ 0 (> 0) für alle x ∈]a, b[, so ist f auf [a, b] (streng)
monoton steigend.
Ist f 0 (x) ≤ 0 (< 0) für alle x ∈]a, b[, so ist f auf [a, b] (streng)
monoton fallend.
Ist f 0 (x) = 0 für alle x ∈]a, b[, so ist f auf [a, b] konstant.
Mathematischer Vorkurs – TU Dortmund
Seite 72 / 157
Anwendungen der Differentialrechnung
Wenn nicht anders angegeben, sind im Folgenden die Intervalle stets offen
(diese werden dann mit I bezeichnet).
7.3 Satz: Krümmung
Es se f : I →
R zweimal differenzierbar. Dann heißt (der Graph von) f ...
1. ... linksgekrümmt, falls f 00 > 0 auf ganz I.
2. ... rechtsgekrümmt, falls f 00 < 0 auf ganz I.
7.4 Definition: Wendestelle, Wendepunkt
R
Es sei f : I → zweimal differenzierbar, x0 ∈ I und f 00 (x) habe in x0
einen Vorzeichenwechsel.
Dann heißt x0 eine Wendestelle und der Punkt
x0 , f (x0 ) ein Wendepunkt (des Graphen) von f .
Mathematischer Vorkurs – TU Dortmund
Seite 73 / 157
Anwendungen der Differentialrechnung
7.5 Definition: Extremum
Es sei D ∈ eine beliebige Teilmenge, f : D →
Graph von) f hat in x0 ein ...
R
R und x0 ∈ D. (Der
1
...globales Maximum, wenn f (x) ≤ f (x0 ) für alle x ∈ D.
2
...globales Minimum, wenn f (x) ≥ f (x0 ) für alle x ∈ D.
3
...lokales Maximum, wenn es ein offenes Intervall I mit x0 ∈ I gibt, so
dass f (x) ≤ f (x0 ) für alle x ∈ I ∩ D.
4
...lokales Minimum, wenn es ein offenes Intervall I mit x0 ∈ I gibt, so
dass f (x) ≥ f (x0 ) für alle x ∈ I ∩ D.
Maxima und Minima fassen wir auch unter dem Namen Extrema
zusammen. Wir nennen x0 eine Extremalstelle, f (x0 ) ein Extremum und
x0 , f (x0 ) einen Extrempunkt (des Graphen) von f .
Mathematischer Vorkurs – TU Dortmund
Seite 74 / 157
Anwendungen der Differentialrechnung
7.6 Satz: Notwendiges Kriterium für Extrema
R
Es sei f : I → differenzierbar in x0 ∈ I. Hat f in x0 ein lokales
Extremum, so ist f 0 (x0 ) = 0.
Die Umkehrung dieses Satzes ist in der Regel nicht richtig. Das zeigt schon
das Beispiel f (x) = x3 und x0 = 0.
Das Phänomen des letzten Beispiels werden wir nun näher beleuchten.
Mathematischer Vorkurs – TU Dortmund
Seite 75 / 157
Anwendungen der Differentialrechnung
7.7 Satz: Hinreichendes Kriterium für Extrema
Es sei f : I → hinreichend oft differenzierbar und x0 ∈ I mit f 0 (x0 ) = 0.
Dann gilt
<0
lokales Maximum
00
1. Ist f (x0 )
, so hat f in x0 ein
.
>0
lokales Minimum
R
2. Ist f 00 (x0 ) = 0 und f 000 (x0 ) 6= 0 so hat f in x0 eine Wendestelle. In
diesem Fall spricht man von einem Sattelpunkt.
Allgemeiner gilt:
3. Ist f 00 (x0 ) = . . . = f (n−1) (x0 ) = 0 und f (n) 6= 0, dann gilt
• Ist n gerade, so hat f in x0 ein
(
lokales Maximum, falls f (n) (x0 ) < 0
.
lokales Minimum, falls f (n) (x0 ) > 0
• Ist n ungerade, so hat f in x0 einen Wendepunkt.
Mathematischer Vorkurs – TU Dortmund
Seite 76 / 157
Anwendungen der Differentialrechnung
Beispiel: Wir betrachten f :
R → R mit f (x) = 2 +sincosx x . Da die
Funktion 2π-periodisch ist, schauen wir sie uns nur auf einem Teilintervall
an, nämlich auf [0, 2π]. (genauer auf ] − δ, 2π + δ[, da wir ein offenes
Intervall brauchen).
f (x)
y
f 0 (x)
f 00 (x)
2π
x
Mathematischer Vorkurs – TU Dortmund
Seite 77 / 157
Integralrechnung
Kapitel 8 – Integralrechnung
Mathematischer Vorkurs – TU Dortmund
Seite 78 / 157
Integralrechnung
8.1 Definition: Stammfunktion
Es seien f, F : I → Funktionen. F heißt Stammfunktion von f auf I,
wenn F auf I differenzierbar ist und F 0 (x) = f (x) für alle x ∈ I.
Wenn wir für f eine Stammfunktion suchen, so sagen wir auch: wir
integrieren f .
Wenn wir eine Stammfunktion gefunden haben, so nennen wir f
integrierbar.
R
8.2 Satz
1 Ist F eine Stammfunktion zu f , so ist auch G = F + c mit einer
Konstanten c ∈ eine Stammfunktion von f .
R
2
Alle Stammfunktionen zu f sind von dieser Form.
Sind also G und F zwei Stammfunktionen, so gibt es eine Konstante
c ∈ mit G(x) = F (x) + c.
R
Mathematischer Vorkurs – TU Dortmund
Seite 79 / 157
Integralrechnung
8.3 Definition: unbestimmtes Integral
Die Menge aller ZStammfunktionen von f heißt unbestimmtes Integral von
f und wird mit f (x) dx bezeichnet.
Ist F eine Stammfunktion zu f so schreiben wir auch
Z
f (x) dx = F (x) + c .
8.4 Satz: erste Eigenschaften: Linearität
Z
Z
Z
1.
f (x) + g(x) dx = f (x) dx + g(x) dx.
Z
Z
2.
c · f (x) dx = c · f (x) dx für c ∈ .
R
Mathematischer Vorkurs – TU Dortmund
Seite 80 / 157
Integralrechnung
8.5 Beispiele
1. Wir bekommen grundlegende Beispiele für Stammfunktionen, wenn
wir die Tabellen zu Beispiel 6.3 von rechts nach links lesen.
2. Insbesondere können wir alle Polynome integrieren und bekommen für
n
X
p(x) =
ak xk
k=0
Z
p(x) dx = c +
n+1
X
k=1
ak−1 k
x
k
Mathematischer Vorkurs – TU Dortmund
Seite 81 / 157
Integralrechnung
Nun folgen zwei wichtige Eigenschaften des Integrals, die sich auf Produkte
und Verkettungen von Funktionen beziehen. Sie folgen direkt aus den
Rechenregeln für das Differenzieren (Satz 6.8).
8.6 Satz: Partielle Integration
Z
Z
0
f (x) · g (x) dx = f (x) · g(x) − f 0 (x) · g(x) dx.
8.7 Satz: Substitution
Ist F eine Stammfunktion zu f und ist g differenzierbar, so gilt
Z
f g(x) · g 0 (x) dx = F g(x) + c.
Mathematischer Vorkurs – TU Dortmund
Seite 82 / 157
Integralrechnung
8.8 Folgerungen
Es sei F eine Stammfunktion zu f . Dann ist
Z
1.
f (x + a) dx = F (x + a) + c
Z
1
2.
f (a · x) dx = F (a · x) + c
a
Z
2
1
3.
g(x) · g 0 (x) dx = g(x) + c
2
Z
1
4.
x · f x2 dx = · F x2 + c
2
Mathematischer Vorkurs – TU Dortmund
Seite 83 / 157
Integralrechnung
8.9 Definition: bestimmtes Integral
R
Es sei f : [a, b] → eine Funktion. Dann hat der Wert F (b) − F (a) für
jede Stammfunktion F von f den gleichen Wert. Dieser Wert heißt
bestimmtes Integral von f in den Grenzen a und b und wird mit
Z
a
b
b
f (x) dx = F (x) := F (b) − F (a).
a
bezeichnet. f heißt Integrand und a bzw. b untere bzw. obere
Integrationsgrenze sowie [a, b] das Integrationsintervall.
Mathematischer Vorkurs – TU Dortmund
Seite 84 / 157
Integralrechnung
8.10 Satz: Eigenschaften des bestimmten Integrals
Z a
Z b
Z a
1
f (x) dx = 0 und
f (x) dx = −
f (x) dx.
a
a
b
Z b
Z c
Z b
2
f (x) dx =
f (x) dx +
f (x) dx.
a
a
c
Z b
b Z b
0
3
f (x) · g 0 (x).
f (x) · g(x) dx = f (x) · g(x) −
a
a
4
a
g(a)
g(a)
Z
5
a
Ist F eine Stammfunktion zu f und ist g differenzierbar, so gilt
Z b
Z g(b)
g(b)
f g(x) · g 0 (x) dx =
f (t) dt = F (t) .
Ist f (x) ≤ g(x) so ist
b
Z
f (x) dx ≤
a
b
g(x) dx.
a
Mathematischer Vorkurs – TU Dortmund
Seite 85 / 157
Integralrechnung
y
y = f (x)
a
Af (a, b)
b
x
8.11 Folgerung: Integral und Flächeninhalt
Rb
Das Integral a f (x) dx lässt sich als der (orientierte) Inhalt der Fläche
unter dem Graphen der Funktion f im Intervall [a, b] deuten.
Mathematischer Vorkurs – TU Dortmund
Seite 86 / 157
Integralrechnung
8.12 Definition und Satz: geometrischer Flächeninhalt
Es sei f integrierbar. Der geometrische Flächeninhalt Af (a, b) von f auf
dem Intervall [a, b] ist definiert als Inhalt der Fläche, die der Graph von f
mit der x-Achse einschließt.
Z
b
|f (x)| dx berechnen.
Dieser lässt sich gemäß Af (a, b) =
a
8.13 Beispiel
Für f (x) = x3 ist F (x) = 14 x4 eine Stammfunktion. Damit gilt also
Z 1
1
f (x) dx = F (x) = 0, aber
−1
−1
Z 1
Z 1
1 1
Af (−1, 1) =
|f (x)| dx = 2
f (x) dx = F (x) = .
2
0
−1
0
Mathematischer Vorkurs – TU Dortmund
Seite 87 / 157
Integralrechnung
Wir haben schon gesehen, dass Integration in einem gewissen Sinne die
Umkehrung der Differentiation ist. Zum Abschluß dieses Kapitels zitieren
wir noch den Satz, der diesen Sachverhalt mathematisch formuliert. Dieser
heißt
8.14 Hauptsatz der Differential- und Integralrechnung
Jede auf einem Intervall [a, b] stetige Funktion f besitzt eine
Stammfunktion F .
Genauer gilt: Definiert man für x ∈ [a, b]
Z x
F (x) :=
f (t) dt
a
so ist diese Funktion auf [a, b] stetig, auf ]a, b[ stetig differenzierbar und es
gilt F 0 (x) = f (x).
Mathematischer Vorkurs – TU Dortmund
Seite 88 / 157
Logarithmus- und Exponentialfunktion
Kapitel 9 – Logarithmus- und Exponentialfunktion
Mathematischer Vorkurs – TU Dortmund
Seite 89 / 157
Logarithmus- und Exponentialfunktion
Wir können laut des Hauptsatzes der Differential- und Integralrechnung alle
stetigen Funktionen integrieren. Die Funktion f (x) = x1 tauchte allerdings
in unseren Beispielen zur Differentiation nie als Ergebnis auf (vgl. Tabellen
aus Beispiel 6.3). Ihre Stammfunktion kennen wir also bisher nicht und wir
definieren deshalb wie folgt:
9.1 Definition: Logarithmusfunktion
Die Logarithmusfunktion (oder der Logarithmus) ln :
über eine Stammfunktion der auf
R+ → R ist definiert
R+ stetigen Funktion x 7→ x1 . Genauer:
x
Z
ln x :=
1
1
dt .
t
Mathematischer Vorkurs – TU Dortmund
Seite 90 / 157
Logarithmus- und Exponentialfunktion
9.2 Satz: Eigenschaften des Logarithmus
1
1. ln0 (x) = .
x
2. ln 1 = 0.
1
3. ln = − ln x.
x
4. ln(x · y) = ln x + ln y.
5. ln ist streng monoton steigend.
6. lim ln x = ∞ und lim ln x = −∞
x→∞
x→0+
Da der Logarithmus ln streng monoton ist, existiert seine Umkehrfunktion.
Mathematischer Vorkurs – TU Dortmund
Seite 91 / 157
Logarithmus- und Exponentialfunktion
9.3 Definition: Exponentialfunktion
R R
Die Exponentialfunktion exp : → + ist die Umkehrfunktion des
Logarithmus ln : + → .
Die Zahl e := exp(1) = ln−1 (1) ≈ 2, 718281828 . . . heißt Eulersche Zahl.
R
R
9.4 Satz: Eigenschaften der Exponentialfunktion
1. exp ist streng monoton wachsend.
2. exp(ln x) = ln(exp x) = x.
3. exp(0) = 1 und exp(x) > 0.
4. lim exp(x) = ∞ und lim exp(x) = 0
x→∞
x→−∞
5. exp(x) · exp(y) = exp(x
n + y), insbesondere gilt für n ∈
exp(n · x) = exp(x) .
N damit
6. exp0 (x) = exp(x).
Mathematischer Vorkurs – TU Dortmund
Seite 92 / 157
Logarithmus- und Exponentialfunktion
9.5 Bemerkung
Aus Satz 9.4 Punkt 5. folgt exp(q) = eq für alle q ∈
Deshalb schreiben wir exp(x) = ex sogar für x ∈
R.
Q.
Sinn bekommt die Schreibweise aus der vorigen Bemerkung durch
9.6 Definition: allgemeine Potenz
Für a, b ∈
R mit a > 0 definieren wir die allgemeine Potenz ab durch
ab := exp(b ln a) .
Mathematischer Vorkurs – TU Dortmund
Seite 93 / 157
Logarithmus- und Exponentialfunktion
Mit Hilfe des Logarithmus können wir unsere Integralregeln weiter ergänzen:
9.7 Satz
Z
1
1
dx = ln |x| + c.
x
Z 0
f (x)
2
dx = ln |f (x)| + c.
f (x)
Mathematischer Vorkurs – TU Dortmund
Seite 94 / 157
Aussagenlogik
Kapitel 10 – Aussagenlogik
Mathematischer Vorkurs – TU Dortmund
Seite 95 / 157
Aussagenlogik
10.1 Definition: Wahrheitswerte, Aussagen
Eine Aussage A ist eine Behauptung über einen (mathematischen)
Sachverhalt, der genau einer der beiden Wahrheitswerte “wahr” (w) oder
“falsch” (f ) zugeordnet werden kann.
10.2 Definition: Negation, NOT
Ist A eine Aussage so nennt man ¬A die Negation von A (man sagt auch
“nicht A”). Sie ist definiert über ihren Wahrheitsgehalt:
¬A ist wahr, wenn A falsch ist und
¬A ist falsch, wenn A wahr ist.
Mathematischer Vorkurs – TU Dortmund
Seite 96 / 157
Aussagenlogik
10.3 Definiton: Konjunktion, AND
Sind A und B Aussagen, so bezeichnet A ∧ B die Konjunktion (man sagt
auch “A und B”). Sie ist definiert über ihren Wahrheitsgehalt:
A∧B
A∧B
A∧B
A∧B
ist
ist
ist
ist
wahr, wenn A und B beide wahr sind,
falsch, wenn A wahr und B falsch ist,
falsch, wenn A falsch und B wahr ist und
falsch, wenn A und B beide falsch sind.
10.4 Definiton: Disjunktion, OR
Sind A und B Aussagen, so bezeichnet A ∨ B die Disjunktion (man sagt
auch “A oder B”). Sie ist definiert über ihren Wahrheitsgehalt:
A∨B
A∨B
A∨B
A∨B
ist
ist
ist
ist
wahr, wenn A und B beide wahr sind,
wahr, wenn A wahr und B falsch ist,
wahr, wenn A falsch und B wahr ist und
falsch, wenn A und B beide falsch sind.
Mathematischer Vorkurs – TU Dortmund
Seite 97 / 157
Aussagenlogik
10.5 Definiton: Tautologie, Kontradiktion
Es sei A eine beliebige Aussage, dann ist ...
W
1. ... die Tautologie, , die Aussage mit dem Wahrheitswert der
Aussage (¬A) ∨ A, und
2. ... die Kontradiktion,
Aussage (¬A) ∧ A
F, die Aussage mit dem Wahrheitswert der
W ist also immer wahr und F ist immer falsch.
Die letzten Definitionen kann man gut mit Hilfe von Wahrheitswerttabellen
beschreiben:
A B ¬A A ∧ B A ∨ B ¬A ∨ A,
w w f
w
w
w
w f
f
f
w
w
f w w
f
w
w
f f w
f
f
w
W
¬A ∧ A,
f
f
f
f
F
Mathematischer Vorkurs – TU Dortmund
Seite 98 / 157
Aussagenlogik
10.6 Definition: Äquivalenz von Aussagenverknüpfungen
Es seien A, B, . . . Aussagen und F (A, B, . . .) und G(A, B, . . .) Ausdrücke
die durch Verknüpfung der Aussagen entstehen. Dann heißen F (A, B, . . .)
und G(A, B, . . .) äquivalent, wenn für alle Kombinationen von
Wahrheitswerten der Aussagen A, B, . . . die Aussagen F (A, B, . . .) und
G(A, B, . . .) den gleichen Wahrheitswert haben.
Wir schreiben dann F (A, B, . . .) ⇐⇒ G(A, B, . . .).
10.7 Bemerkung: Die Äquivalenz von Aussagenverknüpfungen lässt sich
sehr gut mit Hilfe von Wahrheitswerttabellen überprüfen. Gehen k
Aussagen A1 , A2 , . . . , Ak in die Äquivalenz ein, so braucht man eine
Tabelle mit 2k Zeilen.
Mathematischer Vorkurs – TU Dortmund
Seite 99 / 157
Aussagenlogik
10.8 Satz: einfache Beispiele
Es seien A und B Aussagen. Dann gelten folgende Äquivalenzen:
¬(¬A) ⇐⇒ A
A ∧ B ⇐⇒ B ∧ A
A ∨ A ⇐⇒ A
A∨
⇐⇒
A ∨ ⇐⇒
W
F
W
A
A ∨ B ⇐⇒ B ∨ A
A ∧ A ⇐⇒ A
A∧
⇐⇒ A
A ∧ ⇐⇒
W
F
F
Mathematischer Vorkurs – TU Dortmund
Seite 100 / 157
Aussagenlogik
10.9 Satz: Rechenregeln
Es seien A, B und C Aussagen. Dann gelten folgende Äquivalenzen:
1. (A ∧ B) ∧ C ⇐⇒ A ∧ (B ∧ C) und (A ∨ B) ∨ C ⇐⇒ A ∨ (B ∨ C)
— Assoziativgesetze
2. A ∧ (B ∨ C) ⇐⇒ (A ∧ B) ∨ (A ∧ C) und
A ∨ (B ∧ C) ⇐⇒ (A ∨ B) ∧ (A ∨ C)
— Distributivgesetze
3. ¬(A ∧ B) ⇐⇒ ¬A ∨ ¬B und
¬(A ∨ B) ⇐⇒ ¬A ∧ ¬B
— de Morgansche Regeln
Mathematischer Vorkurs – TU Dortmund
Seite 101 / 157
Aussagenlogik
10.10 Definition: Subjunktion, Bikonditional
Es seien A und B Ausagen. Dann ist die Subjunktion durch
A → B :⇐⇒ ¬A ∨ B
und das Bikonditional durch
A ↔ B :⇐⇒ (A → B) ∧ (B → A)
definiert.
Bemerkung: Die Wahrheitswertabellen dieser Verknüpfungen lauten wie
folgt:
A B A→B A↔B
w w
w
w
f
f
w f
f w
w
f
f f
w
w
Mathematischer Vorkurs – TU Dortmund
Seite 102 / 157
Aussageformen
Kapitel 11 – Aussageformen
Mathematischer Vorkurs – TU Dortmund
Seite 103 / 157
Aussageformen
11.1 Definition: Aussageformen
Eine Aussageform A über einer Grundmenge G ist ein Satz in Form einer
Aussage, der eine Variable enthält, die ihre Werte in G annimmt.
Wird die Variable durch einen konkreten Wert aus x ∈ G ersetzt, so liegt
eine Aussage A(x) vor.
11.2 Definition: Erfüllungsmenge
1. Ist A eine Aussageform auf der Grundmenge G so nennt man die
Menge (A) := {x ∈ G | A(x) ist wahr} die Erfüllungsmenge von A.
L
2. Gilt für die Erfüllungsmenge einer Aussageform
man A allgemeingültig.
3. Ist die Aussage A(x) für alle x ∈ G falsch, dh.
man A nicht erfüllbar.
4. Ist für eine Aussageform
L(A) = G, so nennt
L(A) = ∅, so nennt
L(A) 6= ∅, so heißt A erfüllbar.
Mathematischer Vorkurs – TU Dortmund
Seite 104 / 157
Aussageformen
11.3 Beispiel: Mengenoperationen
Es seien M, N ⊂ G Mengen und M die Aussageform, für die die Aussage
M (x) durch x ∈ M definiert ist (analog für N ).
Dann ist
L(M ) = M und L(N ) = N .
Über genau diese Aussageformen haben wir die Mengenoperationen
definiert (vgl. Kapitel 1)
Mathematischer Vorkurs – TU Dortmund
Seite 105 / 157
Aussageformen
11.4 Definition: Verknüpfen von Aussageformen
Sind A und B Aussageformen auf der gleichen Grundmenge G so sind die
Aussageformen ¬A, A ∧ B und A ∨ B punktweise definiert. Dh.
(¬A)(x) := ¬(A(x)),
(A ∧ B)(x) := A(x) ∧ B(x) und
(A ∨ B)(x) := A(x) ∨ B(x).
11.5 : Bemerkung
W
Wir bezeichnen mit
bzw.
stets wahr bzw. falsch ist.
F die Aussageformen, die für beliebiges x ∈ G
Die Rechenregeln für Aussagen übertragen sich analog.
Mathematischer Vorkurs – TU Dortmund
Seite 106 / 157
Aussageformen
11.6 Satz
Es seien A und B Aussageformen auf der gleichen Grundmenge G. Dann
gilt
c
1. (¬A) = (A) ,
L
L
2. L(A ∧ B) = L(A) ∩ L(B),
3. L(A ∨ B) = L(A) ∪ L(B)
Mathematischer Vorkurs – TU Dortmund
Seite 107 / 157
Aussageformen
11.7 Wiederholung: Allquantor, Existenzquantor
Es sei A eine Aussageform über der Grundmenge G.
∀x ∈ G : A(x) bedeutet, dass die Aussageform A allgemeingültig ist —
Für jedes x ∈ G ist A(x) wahr.
∃x ∈ G : A(x) bedeutet, dass die Aussageform A erfüllbar ist — Es gibt
ein x ∈ G, so dass A(x) wahr ist.
11.8 Bemerkung
Es sei A eine Aussageform über G. Dann gilt
1. A ist erfüllbar
⇐⇒ ∃x ∈ G : A(x).
2. A ist nicht erfüllbar
⇐⇒ ∀x ∈ G : ¬A(x).
3. A ist allgemeingültig
⇐⇒ ∀x ∈ G : A(x).
4. A ist nicht allgemeingültig ⇐⇒ ∃x ∈ G : ¬A(x).
Mathematischer Vorkurs – TU Dortmund
Seite 108 / 157
Aussageformen
In der letzten Bemerkung haben wir schon von folgendem Sachverhalt
Gebrauch gemacht:
11.9 Satz: Negation von Quantoren
Es gilt:
1. ¬ ∃x ∈ G : A(x)
⇐⇒
∀x ∈ G : ¬A(x)
2. ¬ ∀x ∈ G : A(x)
⇐⇒
∃x ∈ G : ¬A(x)
Beispiel: Es seien A bzw. B Aussageformen auf G1 bzw. G2 . Dann gilt
¬ ∀x ∈ G1 ∃y ∈ G2 : (A(x) → B(x))
⇐⇒ ∃x ∈ G1 ∀y ∈ G2 : (A(x) ∧ ¬B(x))
Mathematischer Vorkurs – TU Dortmund
Seite 109 / 157
Aussageformen
11.10 Satz
Es sei A eine Aussageform auf der Menge G1 × G2 . Dann gilt:
1. Nebeneinanderstehende gleiche Quantoren darf man vertauschen, dh.
∀x ∈ G1 ∀y ∈ G2 : A(x, y) ⇐⇒ ∀y ∈ G2 ∀x ∈ G1 : A(x, y)
und
∃x ∈ G1 ∃y ∈ G2 : A(x, y) ⇐⇒ ∃y ∈ G2 ∃x ∈ G1 : A(x, y).
2. Bei unterschiedlichen Quantoren darf man das (in der Regel) nicht.
Mathematischer Vorkurs – TU Dortmund
Seite 110 / 157
Beweisführung
Kapitel 12 – Beweisführung
Mathematischer Vorkurs – TU Dortmund
Seite 111 / 157
Beweisführung
12.1 Definiton Folgerung
Sind A und B Aussageformen über der Grundmenge G, so ist die
Folgerung wie folgt definiert:
A ⇒ B genau dann, wenn ∀x ∈ G : A(x) → B(x)
Das heißt: A ⇒ B, wenn die Subjunktion A → B allgemeingültig ist.
12.2 Definiton: Äquivalenzumformung
Zwei Aussageformen A und B über der Grundmenge G heißen äquivalent,
A ⇔ B, wenn A ⇒ B und B ⇒ A.
12.3 Satz
A ⇒ B genau dann, wenn
L(A) ⊂ L(B).
A ⇔ B genau dann, wenn L(A) = L(B).
Mathematischer Vorkurs – TU Dortmund
Seite 112 / 157
Beweisführung
12.4 Regel: Aussagen mit einem Existenzquantor
Eine Existenzaussage ∃x ∈ G : A(x) kann man beweisen, indem man ein
konkretes x ∈ G angibt, so dass A(x) wahr ist.
Der Beweis beginnt dann üblicherweise so: “Wähle x =...”
12.5 Regel: Aussagen mit einem Allquantor
Eine Allaussage ∀x ∈ G : A(x) kann man beweisen, indem für einen Wert
x, von dem man nichts weiter annimmt, als dass er aus G stammt,
nachweist, dass A(x) wahr ist.
Der Beweis beginnt dann üblicherweise so: “Sei x ∈ G beliebig ...”
Mathematischer Vorkurs – TU Dortmund
Seite 113 / 157
Beweisführung
12.6 Regel: Folgerungen und Äquivalenzen
1. Ist eine Aussage A ⇒ B zu zeigen, so kann der Beweis wie folgt
verlaufen:
Sei x ∈
L(A) beliebig. Weise nun die Gültigkeit von B(x) nach.
2. Die Aussage A ⇔ B kann man beweisen, indem man das obige in
beide Richtung durchführt.
Mathematischer Vorkurs – TU Dortmund
Seite 114 / 157
Beweisführung
12.7 Regel: Allaussagen mit zwei Quantoren
Den Beweis von ∀x ∈ G1 ∃y ∈ G2 : A(x, y) kann man wie folgt aufbauen:
Es sei x ∈ G1 beliebig. Dann finde ein y ∈ G2 (das von x abhängen darf),
so dass A(x, y) wahr ist.
12.8 Regel: Existenzaussagen mit zwei Quantoren
Den Beweis von ∃x ∈ G1 ∀y ∈ G2 : A(x, y) kann man wie folgt aufbauen:
Gib ein konkretes x ∈ G1 an, so dass A(x, y) für alle y ∈ G2 wahr ist.
Mathematischer Vorkurs – TU Dortmund
Seite 115 / 157
Beweisführung
12.9 Regel: Indirekter Beweis
Will man A ⇒ B beweisen, so kann man stattdessen ¬B ⇒ ¬A zeigen.
Diese beiden Aussagen sind äquivalent.
12.10 Regel Widerlegen von Aussagen
Soll eine Aussage A widerlegt werden, so kann man diese zunächst
negieren, und dann zeigen, dass ¬A allgemeingültig ist.
Das ist insbesondere oft bei Aussagen, die Quantoren beinhalten
anwendbar.
12.11 Regel: Widerspruchsbeweis
1. Will man zeigen, dass eine Aussage A wahr ist, so kann man
stattdessen zeigen, dass ¬A → wahr ist. Diese Aussagen sind
äquivalent.
F
Angewendet wird 1. oft in folgender Form:
2. Statt der Aussage A ⇒ B beweist man die Aussage A ∧ ¬B ⇒
Mathematischer Vorkurs – TU Dortmund
F.
Seite 116 / 157
Vollständige Induktion
Kapitel 13 – Vollständige Induktion
Mathematischer Vorkurs – TU Dortmund
Seite 117 / 157
Vollständige Induktion
Die Vollständige Induktion ist ein Beweisverfahren, mit dem man
Allaussagen für Aussageformen beweisen kann, deren Grundbereich die
natürlichen Zahlen sind.
N
Ist nun A eine Aussageform über , d.h. für alle n ∈
Aussage, so ist die zugehörige All-Aussage
∀n ∈
N0 ist A(n) eine
N0 : A(n)
N
Bemerkung: Manchmal ist es sinnvoll oder notwendig statt ganz 0 nur
≥k zu betrachten. Zum Beispiel gilt die Allaussage für die Aussageform
A(n) :⇐⇒ n − 2 > 0 nur für ≥3 .
N
N
Mathematischer Vorkurs – TU Dortmund
Seite 118 / 157
Vollständige Induktion
Bevor wir zu einigen Beispielen und Anwendungen kommen formulieren wir
zuerst einmal das Induktionsprinzip
13.1 Satz: Vollständige Induktion
Es sei A eine Aussageform über
N≥k und es gelte
(IA) A(k) ist wahr.
sowie
(IS) Ist A(n) wahr, so ist auch A(n + 1) wahr
(oder kurz: A(n) −→ A(n + 1)).
Dann ist A(n) für alle n ∈
N≥k wahr.
(IA) nennt man auch den Induktionsanfang und (IS) den Induktionsschluss.
Mathematischer Vorkurs – TU Dortmund
Seite 119 / 157
Vollständige Induktion
Die folgenden Aussagen sind typisch für einen Induktionsbeweis.
13.2 Beispiele: Summen, Gleichungen
1. Für alle n ∈
N0 gilt
n
X
N0 gilt
n
X
N0 gilt
n
X
k=
k=0
2. Für alle n ∈
n(n + 1)
.
2
qk =
q n+1 − 1
.
q−1
k2 =
n(n + 1)(2n + 1)
.
6
k3 =
n2 (n + 1)2
.
4
k=0
3. Für alle n ∈
4. Für alle n ∈
N0 gilt
n
5. Es gilt (x + y) =
k=0
n
X
k=0
n
X
k=0
n k n−k
x y
für alle n ∈
k
N0.
Mathematischer Vorkurs – TU Dortmund
Seite 120 / 157
Vollständige Induktion
13.3 Beispiele: Ungleichungen
6. Es sei x > −1 eine feste reelle Zahl. Dann gilt: Für alle n ∈
(1 + x)n ≥ 1 + nx
7. Ist x 6= 0 so gilt 6. mit “>” für alle n ∈
N ist
N≥2.
N ist pn ≥ n.
9. Es sei p ≥ 3. Dann gilt: Für alle n ∈ N ist pn ≥ n2 .
10. Für alle n ∈ N≥5 gilt 2n > n2 .
√ 1
11. Für alle n ∈ N ist 21 34 56 · · · 2n−1
2n ≤ 3n+1 .
8. Es sei p ≥ 2. Dann gilt: Für alle n ∈
Mathematischer Vorkurs – TU Dortmund
Seite 121 / 157
Vollständige Induktion
13.4 Beispiele: Teilbarkeit
N.
13. 3 teilt
+ 1 für alle n ∈ N0 .
3
14. 6 teilt n − n für alle n ∈ N0 .
12. 3 teilt 13n + 2 für alle n ∈
22n+1
Mathematischer Vorkurs – TU Dortmund
Seite 122 / 157
Vollständige Induktion
13.5 Beispiele: Ableitungen
15. Es ist f (x) =
16. Für alle n ∈
x
1−x .
N0 gilt: Ist f (x) =
2
n!
für alle n ∈
(1−x)n+1
xn , dann ist f 0 (x) = nxn−1 .
Dann ist f (n) (x) =
N.
N
17. Es sei f (x) = e−x . Dann gilt: Für alle n ∈ 0 gibt es ein Polynom pn
2
vom Grad n, so dass f (n) (x) = pn (x)e−x .
1
(−1)n n!an
18. Es sei f (x) :=
. Dann ist f (n) (x) =
für alle
ax + b
(ax + b)n+1
n ∈ 0.
N
N
19. Es sei f (x) = sin(ax) + cos(bx).
Dann ist für alle n ∈ 0
f (n) (x) = an sin ax + n π2 + bn cos bx + n π2 .
Z
x
n
fn (x) + c für alle
20. Es sei fn (x) = x . Dann ist fn (x) dx =
n+1
n ∈ 0.
N
Mathematischer Vorkurs – TU Dortmund
Seite 123 / 157
Lineare Gleichungssysteme
Kapitel 14 – Lineare Gleichungssysteme
Mathematischer Vorkurs – TU Dortmund
Seite 124 / 157
Lineare Gleichungssysteme
14.1 Definition: Lineares Gleichungssystem – LGS
Ein (reelles) lineares Gleichungssystem (LGS) mit n Variablen
x1 , x2 , . . . , xn und m Gleichungen hat folgende Gestalt
a11 x1 + a12 x2 + . . . + a1n xn = b1
a21 x1 + a22 x2 + . . . + a2n xn = b2
..
.
am1 x1 + am2 x2 + . . . + amn xn = bm
R
mit aij , bj ∈ für 1 ≤ i ≤ n und 1 ≤ j ≤ m.
Die aij nennen wir die Koeffizienten des LGS und die bj nennen wir die
rechte Seite des LGS.
Das LGS heißt homogen, wenn die rechte Seite nur aus Nullen besteht.
Mathematischer Vorkurs – TU Dortmund
Seite 125 / 157
Lineare Gleichungssysteme
Kurzschreibweise: Statt der Form in oben benutzen wir auch die etwas
kompaktere Schreibweise
(A|b) :=
a11
a21
..
.
a12
a22
..
.
am1 am2
a1n b1
a2n b2
.. .. .
. .
. . . amn bm
...
...
14.2 Definition: Lösungsmenge
Die Lösungsmenge des LGS (A|b) bezeichnen wir mit
L(A, b) := (x1 , . . . , xn ) ∈ n | (x1 , . . . , xn ) löst (A|b)
R
Mathematischer Vorkurs – TU Dortmund
Seite 126 / 157
Lineare Gleichungssysteme
14.3 Satz: Gauß-Operationen
Die folgenden Operationen verändern die Lösungsmenge eines LGS nicht:
1. Multiplizieren einer Zeile mit einer Zahl a 6= 0.
2. Vertauschen von Zeilen.
3. Addition eines Vielfachen einer Zeile zu einer anderen Zeile.
4. Vertauschen von Spalten
Achtung: Wenn man Punkt 4. anwendet, muss man sich merken, welche
Variable zu welcher Spalte gehört!
Mathematischer Vorkurs – TU Dortmund
Seite 127 / 157
Lineare Gleichungssysteme
14.4 Satz: Gauß-Algorithmus
Es sei (A|b) ein lineares Gleichungssystem, dann kann man durch geeignete
Gauß-Operationen erreichen, dass das LGS die folgende Form bekommt:
y1 y2 · · · yk yk+1 · · · yn
1 0 ··· 0
∗
··· ∗
c1
0 1 ··· 0
∗
··· ∗
c2
..
..
.. . .
..
..
. .
.
.
.
.
0
0
..
.
0
0
..
.
···
···
1
0
..
.
∗
0
···
···
..
.
∗
0
0
0
···
0
0
···
0
ck
ck+1
..
.
cm
Die yj sind die Variablennamen x1 bis xn , aber eventuell in vertauschter
Reihenfolge.
Mathematischer Vorkurs – TU Dortmund
Seite 128 / 157
Lineare Gleichungssysteme
Praktische Durchführung des Gauß-Algorithmus:
1k Wir versuchen durch 3.(Tausch von Zeilen), 4.(Tausch von Spalten)
und 1.(Skalierung einer Zeile) eine “1” in die obere linke Ecke zu
bekommen.
(Ist dies nicht möglich, dann endet der Algorithmus, denn die
Koeffizienten, mit denen man diesen Schritt gestartet hat, sind alle
Null.)
2k Durch Anwenden von 2.(Addition von Zeilen) erzeugen wir Nullen
unterhalb und oberhalb dieser “1”.
3k Wir beginnen nun wieder mit Step1. Allerdings wenden wir ihn auf
das kleinere System an, das wir durch Löschen der ersten Spalte und
ersten Zeile erhalten.
Mathematischer Vorkurs – TU Dortmund
Seite 129 / 157
Vektoren
Kapitel 15 – Vektoren
Mathematischer Vorkurs – TU Dortmund
Seite 130 / 157
Vektoren
15.1 Definition: Vektoren im Zahlenraum
Ein Vektor (im Zahlenraum) mit n Komponenten ist ein n-Tupel reeller
Zahlen, also ein Element aus n . Wir schreiben die Komponenten eines
Vektors in eine Spalte:
v1
(Manchmal benutzen wir die platzsparende
v2
Schreibweise ~v = (v1 , v2 , . . . , vn )T , wobei das T
~v =
.
..
andeutet, dass wir eigentlich einen Spaltenvektor
meinen).
vn
R
15.2 Definition: Rechnen mit Vektoren
v1
w1
.
Mit ~v = .. , w
~ = ... und α ∈
v
wn
n
αv1
α · ~v = ... .
R
v1 + w1
ist ~v + w
~ = ... und
vn + wn
αvn
Mathematischer Vorkurs – TU Dortmund
Seite 131 / 157
Vektoren
R
R
Wir beschränken uns in den kommenden Betrachtungen auf 2 und 3 ,
obwohl alles auch im Höherdimensionalen und allgemeineren Situationen
richtig bleibt.
2~v
~v
~0
~v + w
~
− 12 ~v
w
~
Mathematischer Vorkurs – TU Dortmund
Seite 132 / 157
Vektoren
15.3 Satz: Rechenregeln für Vektoren
Es seien ~u, ~v und w
~ Vektoren und α und β seien reelle Zahlen, dann gilt:
1. ~v + w
~ =w
~ + ~v .
2. ~u + (~v + w)
~ = (~u + ~v ) + w.
~
3. Es gibt einen Nullvektor ~0 mit ~v + ~0 = ~0 + ~v = ~v .
4. Zu ~v gibt es einen Vektor −~v mit ~v + (−~v ) = ~0.
5. α · (β · ~v ) = (αβ) · ~v .
6. 1 · ~v = ~v .
7. (α + β) · ~v = α · ~v + β · ~v .
8. α · (~v + w)
~ = α · ~v + α · w
~
Bemerkung zu 3.: ... nämlich ~0 := (0, 0, . . . , 0)T .
Bemerkung zu 4.: ... nämlich −~v := (−1) · ~v = (−v1 , . . . , −vn )T .
Mathematischer Vorkurs – TU Dortmund
Seite 133 / 157
Vektoren
15.4 Definition: Linearkombination
Es seien ~v1 , . . . , ~vn Elemente des Vektorraums V . Eine Summe der Form
α1~v1 + α2~v2 + . . . + αn~vn
heißt Linearkombination und die Zahlen αj ∈
Linearkombination.
6
4
2
!
Beispiele: Der Vektor
1
0
0
!
,
0
1
0
!
und
0
0
1
∈
R heißen Koeffizienten der
R3 ist eine Linearkombination der Vektoren
!
mit Koeffizienten 6, 4 und 2,
und eine Linearkombination der Vektoren
1
1
0
!
0
1
1
!
,
1
0
1
!
und
mit
Koeffizienten 4, 0 und 2.
Mathematischer Vorkurs – TU Dortmund
Seite 134 / 157
Vektoren
15.5 Definition: Linear abhängig
Die Vektoren ~v1 , . . . , ~vn des Vektorraums V heißen linear abhängig, wenn
es Zahlen α1 , . . . , αn ∈ gibt, die nicht alle Null sind, so dass aber die
Linearkombination α1~v1 + α2~v2 + . . . + αn~vn = ~0 ist.
R
Sie heißen linear unabhängig, wenn sie nicht linear abhängig sind.
15.6 Bemerkung
Die Vektoren ~v1 , . . . ~vn sind genau dann linear unabhängig, wenn die
Gleichung
α1~v1 + α2~v2 + . . . + αn~vn = ~0
(als Gleichung für die Zahlen α1 , . . . , αn ) nur die Lösung
α1 = . . . = αn = 0 hat.
Mathematischer Vorkurs – TU Dortmund
Seite 135 / 157
Vektoren
15.7 Beispiele
1
2
1
1. Die Vektoren ~u = 2 , ~v = 6 , w
~ = 1 ∈ 3 sind linear
3
8
2
abhängig, denn es gilt 4~u + (−1)~v + (−2)w
~ = 0.
1
2
2. Die Vektoren ~v =
,w
~=
∈ 2 sind linear unabhängig, denn
2
1
α+
2β
=
0
α~v + β w
~ = ~0 ist gleichbedeutend mit dem LGS
und
2α+ β = 0
dies hat die eindeutige Lösung α = β = 0 (vgl. das Kapitel über LGS).
R
R
Mathematischer Vorkurs – TU Dortmund
Seite 136 / 157
Vektoren
15.8 Bemerkung
1. ~v ∈ V ist genau dann linear abhängig, wenn ~v = 0.
R
2. Die lineare Abhängigkeit zweier Vektoren ~v , w
~ ∈ 3 ist
gleichbedeutend mit jeweils
a) ~v und w
~ liegen auf einer Geraden durch den Nullpunkt, und
b) je einer der Vektoren ist ein Vielfaches des anderen.
R
3. Die lineare Abhängigkeit dreier Vektoren ~u, ~v , w
~ ∈ 3 ist
gleichbedeutend mit jeweils
a) ~u, ~v und w
~ liegen in einer Ebene durch den Nullpunkt, und
b) mindestens einer der Vektoren ist eine Linearkombination der
anderen beiden.
Mathematischer Vorkurs – TU Dortmund
Seite 137 / 157
Vektoren
15.9 Weitere wichtige Begriffe und Bemerkungen
1. Das Erzeugnis (oder Spann) der Vektoren ~v1 , . . . , ~vk ∈ V ist die
Menge aller Linearkombinationen dieser Vektoren. (Das ist auch für
eine beliebige Menge von Vektoren erklärt).
2. Lässt sich jedes Element von V eindeutig(!) als Linearkombination
der
Vektoren ~v1 , . . . , ~vk ∈ V darstellen, dann nennt man ~v1 , . . . , ~vk eine
Basis von V .
3. Die Elemente einer Basis sind linear unabhängig.
Mathematischer Vorkurs – TU Dortmund
Seite 138 / 157
Vektoren
15.9 Weitere wichtige Begriffe und Bemerkungen[cont.]
Speziell für das Rechnen im
4. n Vektoren des
Basis bilden.
Rn heißt das
Rn sind genau dann linear unabhängig, wenn sie eine
R
5. Die Standardbasis des n besteht aus den kanonischen
Einheitsvektoren
1
0
0
0
1
0
0
0
0
~e1 = . , ~e2 = . , . . . , ~en = . .
..
..
..
0
0
0
0
0
1
Mathematischer Vorkurs – TU Dortmund
Seite 139 / 157
Skalar- und Vektorprodukt
Kapitel 16 – Skalar- und Vektorprodukt
Mathematischer Vorkurs – TU Dortmund
Seite 140 / 157
Skalar- und Vektorprodukt
16.1 Definition: Skalarprodukt, Norm und Winkel
1. Das Skalarprodukt zweier Vektoren ~v , w
~∈
Rn ist definiert durch
~v · w
~ := v1 w1 + v2 w2 + . . . + vn wn .
2. Die Norm (oder der Betrag) eines Vektors ist definiert durch
p
√
k~v k := ~v · ~v = v12 + v22 + . . . + vn2 .
3. Der Winkel ψ ∈ [0, π] zwischen zwei Vektoren ~v , w
~∈
der Nullvektor, ist definiert durch
~v · w
~
.
cos ψ =
k~v kkwk
~
Rn, beide nicht
Mathematischer Vorkurs – TU Dortmund
Seite 141 / 157
Skalar- und Vektorprodukt
Das Winkel wird über das Skalarprodukt so definiert, dass er mit dem
ebenen Winkel im 2 übereinstimmt. Hilfsmittel ist der Kosinussatz:
R
c
α
a
b
a2 = b2 + c2 − 2bc cos α.
Mathematischer Vorkurs – TU Dortmund
Seite 142 / 157
Skalar- und Vektorprodukt
16.2 Satz: Eigenschaften des Skalarproduktes und der Norm
1. ~v · w
~ =w
~ · ~v .
2. ~v · αw
~ + β~u = α(~v · w)
~ + β(~v · ~u .
3. Für ~v 6= ~0 ist k~v1k ~v = 1.
4. ~v · w
~ = 0 genau dann, wenn ~v und w
~ senkrecht aufeinander stehen.
−b
a
5. Der Vektor
steht senkrecht auf dem Vektor
.
a
b
6. k~v k ≥ 0.
7. k~v k = 0 genau dann, wenn ~v = ~0.
8. kα~v k = |α|k~v k.
Mathematischer Vorkurs – TU Dortmund
Seite 143 / 157
Skalar- und Vektorprodukt
16.3 Satz: Dreiecksungleichung
Für Vektoren ~v und w
~ gilt
k~v + wk
~ ≤ k~v k + kwk
~
und
k~v k − kwk
~ ≤ k~v − wk,
~
sowie damit dann
k~v − wk
~ ≤ k~v − ~uk + k~u − wk.
~
16.4 Satz: Parallelogrammgleichung
Für Vektoren ~v und w
~ gilt
k~v + wk
~ 2 + k~v − wk
~ 2 = 2k~v k2 + 2kwk
~ 2.
Mathematischer Vorkurs – TU Dortmund
Seite 144 / 157
Skalar- und Vektorprodukt
R
Im Fall des 3 gibt es noch ein Produkt zwischen Vektoren, dass als
Ergebnis wieder einen Vektor liefert.
16.5 Definition: Kreuzprodukt
v1
w1
Es seien ~v = v2 , w
~ = w2 ∈ 3 . Dann ist das Kreuzprodukt (oder
v3
w3
Vektorprodukt) ~v × w
~ definiert durch
v2 w3 − v3 w2
~v × w
~ := v3 w1 − v1 w3 .
v1 w2 − v2 w1
R
Mathematischer Vorkurs – TU Dortmund
Seite 145 / 157
Skalar- und Vektorprodukt
16.6 Satz: Eigenschaften des Kreuzproduktes
1. ~v × w
~ = −w
~ × ~v .
2. ~v × αw
~ + β~u = α(~v × w)
~ + β(~v × ~u .
3. Ist α der Winkel zwischen ~v und w
~ so ist k~v × wk
~ = k~v kkwk
~ sin α.
4. ~v × w
~ = ~0 genau dann, wenn ~v und w
~ linear abhängig sind.
5. (~v × w)
~ · ~v = (~v × w)
~ ·w
~ = 0. D.h. ~v × w
~ steht sowohl senkrecht auf ~v
als auch auf w.
~
6. k~v × wk
~ entspricht dem Flächeninhalt des von ~v und w
~ aufgespannten
Parallelogramms.
7. ~v , w
~ und ~v × w
~ bilden in dieser Reihenfolge ein Rechtssystem.
Mathematischer Vorkurs – TU Dortmund
Seite 146 / 157
Skalar- und Vektorprodukt
~v × w
~
Mittelfinger
Rechte-HandRegel
w
~
Zeigefinger
~v
Daumen
Mathematischer Vorkurs – TU Dortmund
Seite 147 / 157
Skalar- und Vektorprodukt
Eine Kombination des Skalarproduktes und des Kreuzproduktes im
liefert ein weiteres geometrisch relevantes Produkt:
16.7 Definition: Spatprodukt
Das Spatprodukt dreier Vektoren ~u, ~v , w
~∈
R3
R3 ist definiert durch
s(~u, ~v , w)
~ = ~u · (~v × w)
~
ie folgenden Eigenschaften des Spatproduktes sind direkte Konsequenzen
aus denen der beiden beteiligten Produkte:
16.8 Folgerung: Eigenschaften des Spatproduktes
1. Das Spatprodukt ist total schiefsymmetrisch, d.h.
s(~u, ~v , w)
~ = s(w,
~ ~u, ~v ) = s(~v , w,
~ ~u)
= −s(~v , ~u, w)
~ = −s(~u, w,
~ ~v ) = −s(w,
~ ~v , ~u)
Mathematischer Vorkurs – TU Dortmund
Seite 148 / 157
Skalar- und Vektorprodukt
16.8 Definition: Spatprodukt[cont.]
2. Der Betrag des Spatproduktes |s(~u, ~v , w)|,
~ entspricht dem Volumen
des von ~u, ~v und w
~ aufgespannten Parallelepipeds.
~u × ~v
w
~
~v
~u
Mathematischer Vorkurs – TU Dortmund
Seite 149 / 157
Skalar- und Vektorprodukt
u1
Bemerkung: Man kann das Spatprodukt der Vektoren ~u = u2 ,
u3
v1
w1
~v = v2 und w
~ = w2 mit Hilfe der Sarrus-Regel berechnen.
v3
w3
−
u1
v1
w1
u1
v1
u2
v2
w2
u2
v2
? u3
? v3
? w3 _
u3
−
−
+
v3
_
+
_
+
Es ist nämlich
s (~u, ~v , w)
~ = u1 v2 w3 + v1 w2 u3 + w1 u2 v3 − u3 v2 w1 − v3 w2 u1 − w3 u2 v1
Mathematischer Vorkurs – TU Dortmund
Seite 150 / 157
Geraden und Ebenen
Kapitel 17 – Geraden und Ebenen
Mathematischer Vorkurs – TU Dortmund
Seite 151 / 157
Geraden und Ebenen
17.1 Definition: Gerade und Ebene
R
Es seien ~v , w
~ ∈ 3 linear unabhängige Vektoren und ~a ein weiterer Vektor.
Eine Gerade g ist eine Menge der Form
g = {~x = ~a + t~v | t ∈
R}.
Eine Ebene E ist eine Menge der Form
E = {~x = ~a + t~v + sw
~ | t, s ∈
R}
Dabei heißen ~a Aufpunktvektor und ~v bzw. ~v , w
~ Richtungsvektoren der
Geraden bzw. Ebene. Diese Darstellungen nennt man
Parameterdarstellungen der Geraden bzw. Ebene.
Bemerkung: Geraden kann man analog im
n ≥ 2 definieren.
Rn für n ≥ 1 und Ebenen für
Mathematischer Vorkurs – TU Dortmund
Seite 152 / 157
Geraden und Ebenen
17.2 Bemerkung
Die Richtungsvektoren sind nicht eindeutig.
1. Im Fall der Gerade ist mit ~v auch jeder Vektor α~v für α 6= 0 ein
Richtungsvektor der gleichen Geraden.
2. Im Fall der Ebene lässt sich jeder der Richtungsvektoren ~v und w
~
durch eine Linearkombinaton α~v + β w
~ ersetzen, ohne die Ebene zu
ändern (man muss nur die lineare Unabhängigkeit erhalten).
17.3 Definition: Parallelität
R
1. Zwei Geraden im 3 heißen parallel, wenn ihre Richtungsvektoren
linear abhängig sind.
R
2. Zwei Ebenen im 3 heißen parallel, wenn die Richtungsvektoren der
einen Ebene jeweils als Linearkombination der Richtungsvektoren der
anderen Ebene dargestellt werden können.
Mathematischer Vorkurs – TU Dortmund
Seite 153 / 157
Geraden und Ebenen
17.4 Definition: Normalenvektor einer Ebene
Ein Vektor ~n heißt Normalenvektor der Ebene E, wenn ~n auf allen
Richtungsvektoren der Ebene senkrecht steht.
Gilt zusätzlich noch k~nk = 1, so nennt man ~n einen
Einheitsnormalenvektor.
17.5 Satz
1. Sind ~v und w
~ Richtungsvektoren einer Ebene, so ist
1
(~v × w)
~ ein Einheitsnormalenvektor der Ebene.
~n :=
k~v × wk
~
2. Der Einheitsnormalenvektor einer Ebene ist bis auf das Vorzeichen
eindeutig.
3. Zwei Ebenen sind genau dann parallel, wenn die
Einheitsnormalenvektoren (bis auf das Vorzeichen) übereinstimmen.
Mathematischer Vorkurs – TU Dortmund
Seite 154 / 157
Geraden und Ebenen
Geraden sind bereits durch die Angabe zweier unterschiedlicher Punkte
eindeutig festgelegt, eine Ebene durch die Angabe dreier Punkte, die nicht
auf einer Geraden liegen.
17.6 Satz
Es seien zwei verschiedene Punkte im Raum und p~ und ~q gegeben. Dann
gibt es genau eine Gerade, die p~ und ~q enthält. Diese ist gegeben durch
g = {~
p + t(~q − p~) | t ∈
R}.
Es sei ~r ein weiterer Punkt, der nicht auf der Geraden g durch p~ und ~q
liegt. Dann gibt es genau eine Ebene, die die Punkte p~, ~q und ~r enthält.
Diese ist gegeben durch
E = {~
p + t(~q − p~) + s(~r − p~) | t, s ∈
R}.
Mathematischer Vorkurs – TU Dortmund
Seite 155 / 157
Geraden und Ebenen
17.7 Satz: Hessesche Normalenform
R3 und ~a ein beliebiger Aufpunktvektor. Dann lässt
1. Eine Ebene E im
sich E in der Form
E = {~x | ~n · (~x − ~a) = 0} = {~x | ~n · ~x = ~n · ~a},
darstellen, wobei ~n ein Normalenvektor der Ebene ist.
2. Ist ~n ein Einheitsnormalvektor der Ebene, so ist d0 := ~n · ~a unabhängig
von der Wahl des Aufpunktes.
3. Wählt man den Einheitsnormalenvektor ~n so, dass d0 ≥ 0, so nennt
man die Darstellung
E = {~x | ~n · ~x = d0 }
Hessesche Normalenform (HNF) der Ebene.
4. Ist d0 > 0, so ist die HNF eindeutig.
Mathematischer Vorkurs – TU Dortmund
Seite 156 / 157
Geraden und Ebenen
Mit Hilfe der HNF kann man den Abstand eines Punktes von einer Ebene
bestimmen
17.8 Satz: Abstand Punkt↔Ebene
Es sei {~x | ~n · ~x = d0 } die HNF der Ebene E und ~a ein beliebiger
Aufpunktvektor. Ferner sei P ein Punkt im Raum und p~ sein Ortsvektor.
Dann misst d(P ) := |~n · (~a − p~)| den Abstand des Punktes P von der
Ebene E.
Insbesondere gilt für den Nullpunkt d(O) = d0 .
Mathematischer Vorkurs – TU Dortmund
Seite 157 / 157