Angewandte Mathematik in der Geographie
Werbung

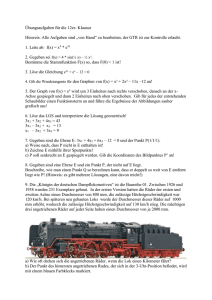
PS – Angewandte Mathematik WS 2002/03 Kathrin Wi nkelmayer 9801661 Angewandte Mathematik in der Geographie Inhalt: 1. Einleitung Seite 2 2. Koordinatensysteme Seite 3 2.1. Dreidimensionale Koordinatensysteme Seite 3 2.2. Ebene Koordinatensysteme Seite 4 3. Geometrische Grundlagen Seite 6 3.1. Metriken Seite 6 3.2. Geradenschnitte Seite 7 4. Kugelgeometrie Seite 9 5. Mathematische Anwendungen in GIS Seite 11 5.1. Seite 11 Transformationen 5.1.1. Transformationen in der Ebene Seite 11 5.1.2. Transformationen im Raum Seite 14 5.2. Seite 15 Planeare geometrische Projektionen 5.2.1. Die Parallelprojektion Seite 16 5.2.2. Die perspektivische Projektion Seite 15 6. Literaturverzeichnis Seite 17 -1- PS – Angewandte Mathematik WS 2002/03 Kathrin Wi nkelmayer 9801661 1. Einleitung Schon zu Beginn allen wissenschaftlichen Arbeitens bei den alten Griechen waren Geographie und Mathematik eng verbunden. Wie sonst hätte man wohl herausfinden können, dass etwa die Erde eine Kugel ist? Auch heute sind viele Bereiche der Geographie ohne die Mathematik undenkbar, wenngleich sich die Ausgangslage grundlegend verändert hat. Sowohl in der Humangeographie als anwendungsorientierte auch in der Mathematik Physiogeographie angewiesen. sind Während wir sich auf die Humangeographie sehr stark auf statistische Mittel stützt, beschäftigt man sich in der Physiogeographie vor allen Dingen mit Erdmessungen aller Art. Beide müssten ohne die Mathematik auf ein wichtiges Werkzeug verzichten! In dieser Arbeit möchte ich mich verstärkt auf die Mittel der modernen physischen Geographie konzentrieren. Informationssysteme, aber Viele auch Bereiche der der Geophysik Geographischen sind für breite Bevölkerungsschichten ein unerlässliches Hilfsmittel im Alltag geworden (GPS, Erdbebenvorhersage,...). -2- PS – Angewandte Mathematik WS 2002/03 Kathrin Wi nkelmayer 9801661 2. Koordinatensysteme In vielen Alltagssituationen ist der Mensch heute auf Orientierungshilfen angewiesen – geradezu überall benötigt man grundlegendes Kartenmaterial. Dieses ist heute nicht immer analog, sondern auch digital erhältlich. Es soll für den Benutzer verständlich und auch lesbar sein. Bei der Herstellung solcher Orientierungshilfen (im wesentlichen etwas Kartenverwandtes) gab es jedoch schon immer ein generelles Problem: die Darstellung der dreidimensionalen Erde auf dem zweidimensionalen Papier. Dazu muss eine Umrechnung mit möglichst verzerrungsfreiem Ergebnis angewendet werden. Geometrische Berechnungen geschehen üblicherweise mit Koordinaten, für die vorweg ein Koordinatensystem zu definieren ist. Grundsätzlich lassen sich im GIS sowohl zweidimensionale als auch dreidimensionale Bezugssysteme nutzen. 2.1. Dreidimensionale Koordinatensysteme Im geozentrischen erdfesten X,Y,Z-Koordinatensystem wird ein Oberflächenpunkt P im Erdschwerefeld bezogen auf eine mittlere Rotationsachse der Erde festgelegt. S ist dabei der Erdschwerepunkt. Als Z-Achse bezeichnet man die mittlere Rotationsachse der Erde, die X-Y-Ebene ist die Äquatorebene und die X-Z-Ebene geht durch die mittlere Meridianebene von Greenwich. Wir sprechen von einer „mittleren“ Ebene, weil Erdrotation nicht um eine starre Achse erfolgt, sondern aufgrund der Polbewegung leicht pendelt. -3- PS – Angewandte Mathematik WS 2002/03 Kathrin Wi nkelmayer 9801661 Abb. 1: Geozentrisches erdfestes Koordinatensystem 2.2. Ebene Koordinatensysteme In der Praxis arbeitet man oft mit geographischen Gebieten geringer räumlicher Ausbreitung und wählt dazu ein örtliches Koordinatensystem. Ein ebenes geodätisches Koordinatensystem ist – ähnlich wie in der Mathematik – ein x-yKoordinatensystem, jedoch mit einem Unterschied: während man in der Mathematik mit x die nach rechts gerichtete und mit y die nach oben gerichtete Achse bezeichnet, verwendet man in der Geographie x für den Hochwert (Ordinate) und y für den Rechtswert (Abszisse) – also genau umgekehrt. Darüber hinaus wird im mathematischen System von der x-Achse ausgehend gegen den Uhrzeiger von 0 bis 360 Grad gezählt, während man im geodätischen System von x (das dem mathematischen y entspricht!!) ausgehend im Uhrzeiger von 0 bis 400 Gon zählt. Dies führt sehr häufig zu Verwirrungen und ist dringend zu beachten! Abb.2: Geodätisches System -4- PS – Angewandte Mathematik WS 2002/03 Kathrin Wi nkelmayer 9801661 Natürlich wird nicht nur das geodätische Koordinatensystem sondern auch das Polarkoordinatensystem häufig verwendet, rechnet man doch in der Geographie sehr häufig mit Winkeln. Die Umrechnung von Polarkoordinaten in rechtwinkelige Koordinaten wird als 1.geodätische Grundaufgabe bezeichnet, die Überführung aus dem rechtwinkeligen System in das Polarsystem als 2.geodätische Grundaufgabe. Hier ein Beispiel: 1.geodätische Grundaufgabe: Gegeben sei ein Punkt P1(x1,y1) in einem kartesischen Koordinatensystem und die Polarkoordinaten eines weiteren Punktes P2(t12,s12). Dann lässt sich das kartesische Koordinatenpaar für P2 ableiten: x2=x1+s12 cos t12 y2=y1+s12 sin t12 Mit Zahlen: gegeben sei P1 mit den Koordinaten (496,72m, 713,64m). t12 sei gemessen 32,9645 Gon (oder 29,6681 Grad) und s 12 sei gemessen 135,25m. Dann hat der Punkt P2 die Koordinaten (614,24m 780,59m). 2.geodätische Grundaufgabe: Gegeben seien zwei Punkte in einem kartesischen Koordinatensystem: P 1(x1,y1) P2(x2,y2) Die relativen Polarkoordinaten lassen sich ableiten zu: y 2 y1 x 2 x1 s12 ( x 2 x1)² ( y 2 y1)² ´ t12 arctan Mit Zahlen: sei P1 mit (407,65m, 528,15m) und P2 mit (525,10m, 795,17m) gegeben. Dann folgt t12 mit 73,6194 Gon und s12 mit 291,71m. -5- PS – Angewandte Mathematik WS 2002/03 Kathrin Wi nkelmayer 9801661 Abb. 3:Vektordaten, Rasterdaten 3. Geometrische Grundlagen Für geographische Informationssysteme ergeben sich ständig geometrische Grundprobleme. Wichtig bei der Darstellung von geographischen Punkten sind die Abstände (abstandstreue Kartendarstellungen sind unerlässlich für Messungen der Distanz zwischen zwei Orten!). 3.1. Metriken Unter einer Metrik (Distanzfunktion) verstehen wir eine Abstandsfunktion zwischen zwei Punkten P und Q. Man bezeichnet sie als d(P,Q). Eine Metrik hat folgende Eigenschaften: d ( P, Q ) 0 P Q d ( P, Q ) 0 P Q d ( P, Q) d (Q, P) d ( P, Q) d ( P, T ) d (T , Q) Die bekannteste Metrik (für Vektordaten) ist die euklidische Metrik. Im ndimensionalen Raum ist sie für P=(p1, p2,...,pn) und Q=(q1,q2,...,qn) so definiert: dE ( P, Q) n ( pi qi)² i 1 -6- PS – Angewandte Mathematik WS 2002/03 Kathrin Wi nkelmayer 9801661 Auch für Rasterdaten können verschiedenste Metriken definiert werden – die oben genannte Euklidische Metrik wird aber wegen der notwendigen Quadrate und Wurzeln eher gemieden. Üblich sind dagegen die - City-Block-Metrik - Schachbrett-Metrik - Chamfer-Metrik Je komplexer die Distanz definiert ist, desto schwieriger wird die Berechnung, desto genauer ist aber auch das Ergebnis. Seien i,j und k,l die Rasterkoordinaten der beiden Punkte, so ergeben sich mit d1 i k und d 2 j l folgende Distanzfunktionen City-Block-Metrik: d 4( Pij , Pkl) d1 d 2 Schachbrett-Metrik: d 8( Pij , Pkl) max d1, d 2 Euklidische Metrik: de( Pij , Pkl) d1² d 2² Dazwischen gelten folgende Größenbeziehungen: de d 4 de 2 de d 8 de 2 3.2..Geradenschnitte Geradenschnitte werden in der Kartographie häufig benötigt (Flächenverschneidung, topologische Strukturierung,...). Auch hier muss zwischen dem Geradenschnitt in der 2. Dimension und der 3. Dimension unterschieden werden. -7- PS – Angewandte Mathematik WS 2002/03 Kathrin Wi nkelmayer 9801661 2-dimensionale Lösung: Zwei Geraden seien durch 2 Punkte festgelegt. Daraus lässt sich leicht die Parameterdarstellung der beiden Geraden g und h berechnen (u und v seien die Steigungen): g : x x1 u ( x 2 x1) und y y1 u ( y 2 y1) h : x x3 u ( x 4 x3) und y y3 u ( y 4 y3) Die Lösungen für die Unbekannten u und v ergeben sich nach der Gleichsetzung der beiden Gleichungen. Daraus lässt sich der Schnittpunkt S(x,y) schnell errechnen. (Anmerkung: vorweg sollte geprüft werden, ob sich die Geraden überhaupt bzw. in einem relevanten Bereich schneiden. In diesem Anwendungsgebiet ist es nötig, den Fall eines echten Schnittes innerhalb der Geradenstücke anzunehmen.) 3-dimensionale Lösung: Diese Lösung ermittelt sich aus dem kürzesten Abstand zweier windschiefer Geraden. Wiederum wird die Parameterdarstellung ermittelt: g: x x1 u ( x 2 x1) y y1 u ( y 2 y1) z z1 u ( z 2 z1) h: x x3 u ( x 4 x3) y y3 u ( y 4 y3) bwz. x x3 vb z z 3 u ( z 4 z 3) bwz. x x1 ua Die beiden Fußpunkte G (auf der Geraden g) und H (auf der Geraden h) des senkrechten Abstandes sind mit den Größen ug und vh festgelegt. ( x1 x3 ua vb)a 0 ( x1 x3 ua vb)b 0 Damit können wiederum G und H mit ihren Koordinaten berechnet werden. -8- PS – Angewandte Mathematik WS 2002/03 Kathrin Wi nkelmayer 9801661 4. Kugelgeometrie Auch in der Geophysik wie in allen anderen Bereichen der Geographie haben sehr viele Problemstellungen mit der Kugelgeometrie zu tun. Es geht hier vor allem um die Berechnung von Abständen auf der Kugeloberfläche. Diese Rechnungen sind leider nicht mit den Formeln der ebenen Trigonometrie lösbar, wir benötigen dazu die sphärische Trigonometrie. Dazu muss allerdings – was nicht völlig korrekt ist – die Kugelgestalt der Erde angenommen werden. Mit diesem Körper lassen sich aber sehr viele Probleme einfach und relativ exakt lösen. Abb.4: Geographisches Koordinatensystem auf der Kugel Besonders nützlich sind dabei einige Formeln, die sich mit den Bezeichnungen der sphärischen Trigonometrie ermitteln lassen. Ein Dreieck auf der Kugeloberfläche ergibt sich demnach aus den Schnittpunkten A, B und C von drei Großkreisen (die jeweils durch den Kugelmittelpunkte gehen). Die Schenkel des Dreiecks ABC werden als a, b und c bezeichnet. Wie man sich leicht vorstellen kann, sind diese jeweils Kreisabschnitte. -9- PS – Angewandte Mathematik WS 2002/03 Kathrin Wi nkelmayer 9801661 Sinussatz: sin a sin b sin c sin sin sin Seitenkosinussatz: cos a cos b cos c sin b sin cos cos b cos c cos a sin c sin a cos cos c cos a cos b sin a sin b cos Winkelcosinussatz: cos cos cos sin sin cos a cos cos cos sin sin cos b cos cos cos sin sin cos c Abb.5. Sphärisches Dreieck (Kugeldreieck) - 10 - PS – Angewandte Mathematik WS 2002/03 Kathrin Wi nkelmayer 9801661 5. Mathematische Anwendungen in GIS 5.1. Transformationen 5.1.1. Transformationen in der Ebene Der Raumbezug für Objekte an der Erdoberfläche ist mit sogenannten Weltkoordinaten gegeben. Zur Darstellung an einem interaktiven Bildschirm oder an einem Zeichentisch sind verschiedene Transformationen notwendig. Zuerst findet ein Übergang von den Weltkoordinaten zu den normalisierten Gerätekoordinaten mit dem Koordinatenbereich ([0,1],[0,1,]) statt. Die nächste Transformation findet zu den jeweiligen Gerätekoordinaten statt (zum Beispiel ([0,65535],[0,65535]) für den Zeichentisch oder ([0,1023],[0,1023]) für einen hochauflösenden Bildschirm). Die einzelnen Schritte der Transformation in der Ebene definieren wir anhand von homogenen Koordinaten. Dies erlaubt uns die Darstellung der Transformationsgleichungen in Matrixschreibweise. Eine beliebige Transformation ergibt sich dann durch eine Folge von Matrixmultiplikationen. Ein beliebiger Punkt P(x,y) wird in homogener Koordinatenschreibweise durch das Tripel P[x h yh w] – also durch einen Vektor – dargestellt. w ist ein Skalierungsfaktor und kann beliebig (ungleich 0) gewählt werden. Der Einfachheit halber wählen wir ihn gleich 1. Die homogenen Koordinaten ergeben sich dann zu xh=xw=x yh=yw=y Also ist jeder Punkt P(x,y) durch das Tripel [x y 1] beschrieben. Vier Formen der Transformation sollen im Folgenden beschrieben werden: - die Translation (Verschiebung) - die Skalierung (Vergrößerung bzw. Verkleinerung) - die Rotation (Drehung) - die Scherung (Drehstreckung) - 11 - PS – Angewandte Mathematik WS 2002/03 Kathrin Wi nkelmayer 9801661 Abb.6: Translation, Skalierung, Rotation, Scherung Die Translation: Damit wird eine geradlinige Verschiebung eines Objektes bezeichnet. Der verschobene Punkt P´(x´,y´,1) ergibt sich aus der Multiplikation des Originalpunktes P(x,y,1) mit der Verschiebungsmatrix T(tx,ty) wobei tx und ty die Verschiebungsparameter sind. P PT (tx, ty) x y 1 x 1 0 0 y 1 0 1 0 tx ty 1 Die Skalierung: Eine Skalierung vergrößert oder verkleinert ein Objekt. Sie wird durch die beiden Skalierungsparameter sx und sy definiert. Die Proportionen zwischen den Koordinatenachsen bleiben daher unverändert, wenn sx gleich sy ist (uniforme Skalierung im Gegensatz zur verzerrenden Skalierung). P PS ( sx, sy ) x y 1 x sx 0 0 y 1 0 sy 0 0 0 1 - 12 - PS – Angewandte Mathematik WS 2002/03 Kathrin Wi nkelmayer 9801661 Die Rotation: Damit bezeichnet man eine Drehung um das Koordinatenzentrum um einen bestimmten Winkel Delta: P PR( ) x y 1 x cos y 1 sin 0 sin cos 0 0 0 1 Die Scherung: Sie führt eine Drehstreckung in x und y durch: P PU (u, v) x y 1 x 1 u 0 y 1v 1 0 0 0 1 Aufgrund der Assoziativität und der Kommutativität bei Matrixprodukten lassen sich durch Aneinanderreihung der oben genannten Transformationsschritte komplexe Transformationen angeben. Um eine Transformation rückgängig zu machen, verwendet man einfach die Inverse der jeweiligen Anwendung. Eine allgemeine Transformation ist durch folgende Transformationsmatrix definiert: P PM a d 0 M b e 0 c f 1 x ax by c y dx ey f In den GIS wird sehr häufig eine 4-Parameter-Transformation angewendet, die aus 2 Translationen, 1 Rotation und 1 Skalierung besteht. - 13 - PS – Angewandte Mathematik WS 2002/03 Kathrin Wi nkelmayer 9801661 5.1.2. Transformationen im Raum Der Übergang zu einer dritten Dimension ist leider nicht nur die einfache Addition einer dritten Komponente. Es bedarf dazu neuer Datenmodelle. Von einer flächenorientierten Betrachtungsweise geht man zu einem volumenhaften Ansatz über. Aus den „Pixel“ (picture elements) weden „Voxel“ (volume elements). Auf das Problem der graphischen Darstellung eines dreidimensionalen Körpers in der Ebene wird später eingegangen. Der dreidimensionale Punkt P(x,y,z) wird – analog zum zweidimensionalen System – in homogenen Koordinaten durch einen um eine Dimension erhöhten Vektor [x y z 1] dargestellt. Die Translation: Sie kann aus dem zweidimensionalen System übernommen werden (um die dritte Komponente erweitert): 1 0 0 0 1 0 T (tx, ty, tz) 0 0 1 tx ty tz 0 0 0 1 Die Skalierung: Für die Skalierung gilt dasselbe wie für die Translation – auch sie kann übernommen werden: sx 0 0 sy S ( sx, sy , sz ) 0 0 0 0 0 0 0 0 sz 0 0 1 - 14 - PS – Angewandte Mathematik WS 2002/03 Kathrin Wi nkelmayer 9801661 Die Rotation: Um die Rotationsmatrix aufstellen zu können, bedarf es zuerst genauerer Betrachtung der Abfolge der Rotationen. Eine Rotation um die z-Achse kann analog zur zweidimensionalen Darstellung übernommen werden: cos sin Rz ( ) 0 0 sin cos 0 0 0 0 0 1 0 0 1 0 Die Rotationen um die Achsen x und y jedoch müssen gesondert behandelt werden. Sei ergeben sich durch zyklische Vertauschung: cos 0 Ry ( ) sin 0 0 sin 1 0 0 cos 0 0 0 1 0 cos Rx ( ) 0 sin 0 0 0 sin cos 0 0 0 0 1 0 0 0 1 5.2. Planeare geometrische Projektionen Unter einer Projektion versteht man allgemein die Abbildung eines Punktes in n Dimensionen auf einen Punkt geringerer Dimension (z.B. von der dreidimensionalen Erdkugel auf die zweidimensionale Karte). Für die Projektion selbst ist es wichtig, das Projektionszentrum und die Projektionsebene festzulegen. Ich beschränke mich hier auf die Parallel- und die perspektivische Projektion, die beide auf Ebenen abbilden. In der Kartographie werden jedoch sehr häufig auch Projektionen auf gekrümmte Flächen wie Kegel oder Zylinder vorgenommen. - 15 - PS – Angewandte Mathematik WS 2002/03 Kathrin Wi nkelmayer 9801661 5.2.1. Die Parallelprojektion: Hier liegt das Projektionszentrum im Unendlichen; die Projektionsstrahlen sind daher parallel. Nach dem Einfallswinkel der Strahlen unterscheidet man noch zwischen orthogonalen und schiefen Projektionen. Die Transformationsmatrix für die orthogonale Projektion lautet: 1 0 Porthoxy 0 0 0 0 0 1 0 0 0 0 0 0 0 1 5.2.2. Die perspektivische Projektion: Das Projektionszentrum liegt hier in einem endlichen Abstand von der Bildebene. Die Objekte werden daher proportional zu ihrer Entfernung von der Bildebene verkleinert dargestellt (entspricht der menschlichen Betrachtungsweise). Nimmt man nun als Bildebene die xy-Ebene an und liegt das Projektionszentrum P z auf der negativen z-Achse im Abstand a (also Pz=(0,0,-a)), so folgt als Transformation: x y z 1 x y 0 z x a 1 y 1 0 z 1 0 0 Abb.7: Parallel- und perspektivische Projektion - 16 - 0 0 1 0 0 0 0 0 0 0 1 a 1 PS – Angewandte Mathematik WS 2002/03 Kathrin Wi nkelmayer 9801661 6. Literaturverzeichnis BILL, Ralf (1999): Grundlagen der Geo-Informationssysteme. Hardware, Software und Daten (Band 1), Wichmann Verlag, Heidelberg BILL, Ralf (1999): Grundlagen der Geo-Informationssysteme. Analysen, Anwendungen und neue Entwicklungen (Band 2), Wichmann Verlag, Heidelberg CARA, Michel (1994): Geophysik, Springer-Lehrbuch, Springer Verlag, Berlin HEYWOOD, Ian (1998): An Introduction to Geographical Information Systems, Longman, Essex - 17 -