Fachbereich Elektrotechnik
Werbung

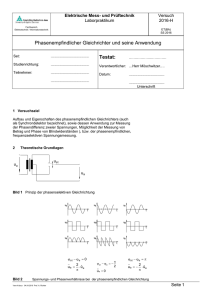
Elektrische Mess- und Prüftechnik Laborpraktikum Versuch 2016-H Fachbereich Elektrotechnik / Informationstechnik ET(BA) SS 2016 Phasenempfindlicher Gleichrichter und seine Anwendung Set: ....................................... Testat: Studienrichtung: ....................................... Verantwortlicher: …Herr Möschwitzer…. Teilnehmer: ....................................... Datum: ………………..………… .................................... ....................................... .................................... Unterschrift 1 Versuchsziel Aufbau und Eigenschaften des phasenempfindlichen Gleichrichters (auch als Synchrondetektor bezeichnet), sowie dessen Anwendung zur Messung der Phasendifferenz zweier Spannungen, Möglichkeit der Messung von Betrag und Phase von Blindwiderständen ), bzw. der phasenempfindlichen, frequenzselektiven Spannungsmessung. 2 Theoretische Grundlagen ust ue ua Bild 1 Prinzip der phasenselektiven Gleichrichtung ue ue ue t ust ust ust t ua t ua ua Bild 2 2 û e t ua t st e 0 t t t st e ua 0 2 t st e ua 2 û e Spannungs- und Phasenverhältnisse bei der phasenempfindlichen Gleichrichtung Document1 16.05.2016 Prof. A. Richter Seite 1 Document1 16.05.2016 Prof. A. Richter Seite 2 2.1 Grundprinzip Dieses besteht darin, daß ein phasenempfindlicher Gleichrichter eine Ausgangsspannung (u a) liefert, deren Größe und Polarität nicht nur von der Amplitude der anliegenden Eingangsspannung u e abhängt, sondern auch von dem Phasenwinkel dieser Eingangsspannung in Bezug auf eine Steuerspannung ust gleicher Frequenz. Um dies zu erreichen, muß dem Gleichrichter neben der Signalwechselspannung (u e) auch eine Referenzspannung (ust) zugeführt werden. Dabei darf die Referenzspannung selbst aber nicht in der gewonnenen Gleichspannung in Erscheinung treten. Sie hat lediglich die Aufgabe, einen mechanischen oder elektrischen Schalter zu betätigen, dessen Schaltrhythmus den Phasenvergleich ermöglicht. Bild 1 zeigt eine Möglichkeit, einen phasen-empfindlichen Gleichrichter mittels mechanischen Schalters zu realisieren. In der Praxis wird diese jedoch nicht angewendet, da Meßfehler durch Kontaktprellungen entstehen können. Die Schaltung ist aber gut geeignet, die prinzipielle Wirkungsweise eines gesteuerten Gleichrichters kennenzulernen. Im Bild 2 sind für verschiedene Werte von st-e die zugehörigen Spannungsverläufe ( u e bzw. u st ) sowie die daraus ableitbare Spannung u a dargestellt. Generell wird diesem Gleichrichter ein Tiefpaß nachgeschaltet, um den Mittelwert von u a ( u a ) zu bilden. Aus den zahlreichen Realisierungsmöglichkeiten des phasenempfindlichen Gleichrichters werden in diesem Praktikum Ringmodulator und Multiplizierer vorgestellt und näher untersucht. 2.2 Der Ringmodulator Obwohl der Ringmodulator ursprünglich - wie der Name schon verrät - für einen anderen Einsatz konzipiert wurde, läßt er sich auch als gesteuerter Gleichrichter betreiben. Der Ringmodulator zählt zur Kategorie der Zerhacker und Modulatoren und stellt einen speziellen Diodenzerhacker dar. Im Bild 3 ist das Schaltbild dargestellt. Die prinzipielle Wirkungsweise besteht darin, daß die Steuerspannung Punkt 5 abwechselnd mit den Punkten 1 und 3 verbindet. Folglich arbeitet das Diodenquartett wie ein Wechselschalter, der die Ausgangsspannung u a von + ue/2 auf - ue/2 umschaltet. Aufgrund der Symmetrie der Schaltung sind ue und ust gleichberechtigt. Die Steuerspannung ust muß aber groß gegenüber der Eingangsspannung ue und den Durchlaßspannungen sein, damit die Dioden momentan umschalten. Der vorliegende Ringmodulator ist symmetrisch aufgebaut mit einem Übersetzungsverhältnis der Übertrager von 1:0,625. Das Diodenquartett besteht aus Dioden vom Typ GA 101 jeweils in Reihe mit 470 Widerständen geschaltet. 1 6 4 ue 5 2 ust Bild 3 Schaltung des Ringmodulators 3 ua 2.3 Der Multiplizierer Ein Multiplizierer ist ein Baustein, der zwei am Eingang anliegende Spannungen miteinander multipliziert am Ausgang bereitstellt; siehe (Bild 4). Wie nachstehend zu zeigen ist, läßt sich auch mit einem Multiplizierer ein phasenselektiver Gleichrichter aufbauen. Geht man aus von der Spannung u e t û e sine t e und der Referenzspannung u st t û st sinst t st , so folgt für e st ua (t) ~ 1 1 û e û st cos e st û e û st cos2st t e st 2 2 (Gl. 1) Daraus folgt nach der Mittelwertbildung für die Ausgangsspannung: UA = u a ( t ) ~ Document1 16.05.2016 Prof. A. Richter 1 û e û st cos e st 2 (Gl 2) Seite 3 Speziell für den Fall, daß e st = 0 ergibt sich für den Mittelwert der Ausgangsspannung ein Maximalwert. 1 û eû st 2 UAmax ~ X ue (Gl 3) TP Bild 4 Prinzipschaltung des Multiplizierers ua ust 3 Anwendungen Der phasenselektive Gleichrichter bietet zunächst einmal die Möglichkeit, meßtechnisch den Phasenunterschied zwischen zwei Wechselspannungen zu bestimmen. Es läßt sich also der Phasenwinkel bestimmen. Damit ist aber auch die Möglichkeit gegeben, Wirk- und Blindwiderstände zu ermitteln. Dazu ist es lediglich erforderlich, neben dem Phasenwinkel auch die Wechselspannung zu messen. Eine dritte Anwendungsmöglichkeit ist der Aufbau eines frequenzselektiven Spannungsmessers. Dieser erlaubt es, aus einem Frequenzspektrum gezielt die Amplitude von Wechselspannungen einer bestimmten Frequenz zu messen. 3.1 Phasenwinkel Unter der Voraussetzung, daß die Amplituden der Eingangs- und Steuerspannung eines phasenselektiven Gleichrichters konstant, und ihre Frequenzen einander absolut gleich sind, ist der Mittelwert der Ausgangsspannung ua (t ) = UA eine eindeutige Abbildung der Differenz der beiden Nullphasenwinkel e st . Wird nun ( ohne dabei die Allgemeingültigkeit einzuschränken ) st = 0 gesetzt, so hängt UA lediglich von e ab, d.h., UA f ( e ) (vergl. auch Bild 2). S X C TP i ue ua UA R Bild 5 Schaltung zur Messung von Wirk- und Blindwiderstand 3.2 Wirk und Blindwiderstand Eine getrennte meßtechnische Bestimmung von Wirk- und Blindwiderstand und damit auch des Phasenwinkels dieses verlustbehafteten Blind-widerstands ist ebenfalls mittels der phasenselektiven Gleichrichtung möglich. Ausgehend von der Eingangsspannung u e û e sint nach Bild 5 ergibt sich z. B. für eine verlustbehaftete Kapazität ( Parallelschaltung von R und C ) der Strom zu: û i i C iR û e C cos t e sin t (Gl. 4) R Multipliziert man nun Strom und Spannung miteinander, so entspricht u a der Momentanleistung p(t), während nach dem Tiefpaß die Spannung UA dem Mittelwert der Momentanleistung ( p(t ) entspricht. Die Phasenverschiebung zwischen den Eingangsspannungen des Multiplizierers kann 0° (S geschlossen) oder 90° (S geöffnet) betragen. Bei geschlossenem Schalter entspricht UA der Wirkleistung (UAw ) und ist somit ein Maß für den Wirkwiderstand R, während bei geöffnetem Schalter U A die Blindleistung ( U Ab ) repräsentiert und somit ein Maß für den Blindwiderstand darstellt. Als Beispiel soll nunmehr eine verlustbehaftete Kapazität untersucht werden: Document1 16.05.2016 Prof. A. Richter Seite 4 3.2.1 Bestimmung des Blindwiderstandes: Am Eingang des Multiplizieres liegt einmal die Steuerspannung, die gegenüber der Eingangsspannung u e um 90° voreilt, zum anderen wird ue über R//C dem zweiten Eingang zugeführt. 2 û û 2 pB ust i ûe cos t ûe C cos t e sin t û e C cos 2 t e sin t cos t R R pB (Gl 5) 2 û 1 2 2 û e C û e C cos 2t e sin 2t 2 R Der zeitliche Mittelwert ( pB ) dieses Ausdrucks ergibt die Blindleistung Q. Da die beiden letzten Terme des Klammerausdrucks der (Gl 5) null ergeben, folgt für die Blindleistung: pB Q kU Ab 2 kU Ab 1 2 ue C C 2 ue 2 (Gl. 6) Der rechte Term der (Gl. 6) enthält nur bekannte Größen, so daß sich die Kapazität berechnen läßt. 3.2.2 Bestimmung des Wirkwiderstandes: Um die Wirkleistung zu bestimmen, wird der Schalter S geschlossen. Damit ist die Steuerspannung gleich der Eingangsspannung und es ergibt sich am Ausgang des Multiplizierers: 2 û û 2 p w u st i û e sin t û e C cos t e sin t û e C sin t cos t e sin2 t R R pw (Gl. 7) 2 2 û 1 û e 2 e cos 2t û e C sin 2t 2 R R Wird nunmehr der zeitliche Mittelwert von p w gebildet, so ergibt sich die Wirkleistung P zu: 2 2 û e û e R (Gl. 8) 2R 2kUAw Der rechte Term der (Gl. 8) enthält wieder nur bekannte Größen, so das sich der Widerstand R berechnen läßt. Unter Verwendung der errechneten Werte von C und R sowie der vorgegebenen Frequenz läßt sich auch der zugehörige Phasenwinkel berechnen: U arctan RC arctan Ab (Gl. 9) UAw p w P kU Aw 3.2.3 Frequenzselektive Spannungsmessung Eine frequenzselektive Spannungsmessung läßt sich auf verschiedene Weise realisieren. Im Rahmen dieses Versuchs soll lediglich die Möglichkeit untersucht werden, den phasenempfindlichen Gleichrichter zum Aufbau eines Selektivvoltmeters zu verwenden. Bild 6 verdeutlicht die auftretenden Probleme. Von anderen Einflußgrößen abgesehen, wird das Resultat der Meßanordnung (punktierte Kurve) verfälscht. Einmal ist der mitgemessene ~ 2 4KTR B ), zum anderen würde die dargestellte Störfrequenz einen Fehler Rauschanteil relativ hoch ( u äq äq verursachen. Diese Fehler lassen sich vermeiden, wenn B verkleinert wird (gestrichelte Kurve). Zu klein darf B aber auch nicht gewählt werden, da Einschwing- und Meßzeit des Selektivoltmeters mit B-1 wachsen. ideal u(t) real Rauschen f meß Bild 6 Probleme der frequenzselektiven Spannungsmessung Document1 16.05.2016 Prof. A. Richter f stör f Seite 5 4 Versuchsvorbereitung 4.1 Skizzieren Sie ua = f(t) für st - e = 45° bzw. - 90°! 4.2 Weshalb wird die mechanische Umschaltung nach Bild 1 in der Praxis nicht angewendet? 4.3 Welche Bedeutung kommt den Widerständen im Diodenquartett nach Bild 3 zu? 4.4 Welche Messabweichungen treten in der Schaltung nach Bild 3 auf und wodurch werden sie verursacht? 4.5 Läßt sich für die Steuerspannung auch eine Sinus-Wechselspannung verwenden? 4.6 Weshalb besteht die Forderung, die Steuerspannung hinreichend groß zu machen? 4.7 Leiten Sie die (Gl. 1) her! 4.8 Wie wird die Mittelwertbildung von ua(t) schaltungstechnisch realisiert? 4.9 Weisen Sie mathematisch nach, daß die beiden letzten Glieder des Klammerausdrucks der (Gl. 5) nach Mittelwertbildung tatsächlich null werden! 4.10 Bestimmen Sie die Maßeinheit von k in der (Gl. 8)! 4.11 Bestätigen Sie die Richtigkeit der (Gl. 9)! 5 Versuchsdurchführung 5.1 Schalten Sie zu Versuchsbeginn alle Geräte ein, und bauen Sie dann die Meßschaltung auf ! Stellen Sie am Funktionsgenerator FG 120 (Yokogawa), Kanal 2, eine Rechteckspannung mit einer Wiederholfrequenz von 10kHz und einer Signalamplitude von 2V, am Kanal 1 eine Sinusspannung gleicher Frequenz und Amplidude ein und stellen Sie beide Spannungen am Oszilloskop dar! Durch den Aufbau des Signalgenerators sind beide Spannungen phasenstarr zueinander. Mit Hilfe der Einstellparameter „Phase“ können Sie den Phasenverschiebungswinkel zwischen beiden Spannungen einstellen. Bestätigen Sie diese Aussage durch Auswertung der Oszillogramme. Triggern Sie das Oszilloskop mit der Rechteckspannung. 5.2 Beschalten Sie den vorgegebenen Ringmodulator in der Weise, daß Sie die Rechteckspannung als Steuerspannung, und die Sinusspannung als Eingangsspannung betrachten. An die Ausgangsklemmen (u a) des Ringmodulators schließen Sie einen Kanal des Oszilloskops, sowie das Digitalmultimeter GDM 8039 an. Der andere Kanal des Oszilloskops wird mit der Eingangsspannung beschaltet. Für die normalerweise am Signalgenerator voreingestellte Phasenverschiebung ( = o°) muß sich nunmehr eine positive Anzeige ergeben. Nehmen Sie für den Bereich 0° < < 360° die Abhängigkeit ua = f() auf, und stellen Sie diese in einem Diagramm dar. Ermitteln Sie aus dem Diagramm möglichst genau Extremwerte und Nullstellen der Funktion! Erklären Sie evtl. vorhandene Abweichungen mit den theoretisch erwarteten Werten (vergl. auch Bild 2)! 5.3 Wiederholen Sie die Aufgabenstellung unter Punkt 5.2, - wobei jedoch als Steuerspannung diesmal eine Sinusspannung zu verwenden ist. Vergleichen Sie das Ergebnis mit dem unter 5.2 erhaltenen Werten, und diskutieren Sie das Ergebnis! Anmerkung: Amplitude mit dem Oszillograph nachkontrollieren! 5.4 Schalten Sie zwischen Signalausgang des Signalgenerators und Eingang des Ringmodulators ein geeignetes RC - Glied, um die unter 5.2 bzw. 5.3 ermittelte Messabweichung in der Bestimmung der Phasenverschiebung zu korrigieren! Aus den eingestellten C- und R- Werten ist die vorgenommene Korrektur mathematisch zu bestätigen! Frequenzselektiver Spannungsmesser 5.5 Lösen Sie nun die Verbindung zwischen Kanal 1 des Funktionsgenerators und des Modulators. Bauen Sie das RC-Glied zurück. Mit Hilfe des Funktionsgenerators 2 (Standford Research) addieren Sie auf die Signalspannung für den Modulator eine Rauschspannung mit einer Amplitude von 5V. Die Signalspannung ist weiterhin eine Sinusspannung mit 2 V Amplitude und einer von der Laboraufsicht vorgegebenen Frequenz. Stellen Sie die Document1 16.05.2016 Prof. A. Richter Seite 6 Signalspannung mit Rauschen auf dem Oszilloskop dar. Versuchen Sie die Frequenz der Signalspannung mit Hilfe des Oszilloskops zu bestimmen! 5.6 Mit Hilfe des phasenselektiven Gleichrichters sollen Sie nun die Frequenz der Signalspannung bestimmen. ( frequenzselektive Spannungsmessung). Hierzu beschalten Sie den Modulator mit einer sinusförmigen Steuerspannung (Kanal 2 des Signalgenerators 1) einer Amplitude von 3 V. Die verrauschte Signalspannung stellt das Eingangssignal für den Gleichrichter dar. Am Ausgang des Gleichrichters schalten Sie einen Tiefpass mit einer eingestellten Grenzfrequenz so, dass die Restwelligkeit der Ausgangsspannung auf dem Oszilloskop merklich reduziert ist. Überprüfen Sie die Einstellung mit dem Oszilloskop! 5.7 Verändern Sie die Frequenz des Steuersignales des Gleichrichters in kleinen Schritten (Einstellauflösung 1 Hz) so, dass Sie bei Erreichen der zu bestimmenden Signalfrequenz eine deutliche Veränderung der Gleichrichterausgangsspannung am Oszilloskop beobachten. 5.8 Notieren Sie Ihre Beobachtungen über das Verhalten der Gleichrichterausgangsspannung, ins besonders bei Steuerpannungen mit einer Frequenz in der Nähe der gesuchten Signalspannungsfrequenz. Interpretieren Sie dieses Verhalten. Notieren Sie die von Ihnen bestimmte Signalfrequenz. 6 Literatur Schmusch, Wolfgang: Elektronische Meßtechnik Würzburg: Vogel 1993 Frühauf . Kranz: Methoden und Verfahren zur Messung elektrischer Größen Hamburg, Dresden: VMS 1992 Schrüfer, Elmar: Elektrische Meßtechnik München, Wien: Hanser 1992 Loose Schommartz: Document1 16.05.2016 Prof. A. Richter msr 22 (1979) H. 11, S.648...649 Seite 7