Dynamik von Massenpunkten
Werbung

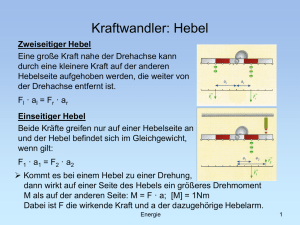
Physik I im Studiengang Elektrotechnik - Dynamik von Massenpunkten - Prof. Dr. Ulrich Hahn WS 2015/2016 1. Newtonsches Axiom Kinematik: Objekteigenschaften nicht berücksichigen Trägheitsaxiom: Bewegungszustand eines Objektes: v Änderung des Bewegungszustandes: a Ohne äußere Beeinflussung behält ein Objekt seinen Bewegungszustand bei. Ruhe gleichförmige (gradlinige) Bewegung Inertialsystem „Aufwand“ für gleiche Beschleunigung unterschiedlicher Objekte verschieden Dynamik: Dynamik von Massenpunkten Bewegungszustand eines Objektes: Schwung Impuls 2 Masse & Impuls Unterscheidungsmerkmal der Objekte: Definition Impuls: (träge) Masse p mv Teilen/Vereinigen von Objekten: m [ p] kg s pgesamt p1 p2 Impuls: Mengeneigenschaft Geschwindigkeit Masse „Impulskapazität“ extensive Größe intensive Größe extensive Größe Häufig in anderen Gebieten der Physik: Gextensiv = KapazitätG * Hintensiv Dynamik von Massenpunkten 3 2. Newtonsches Axiom Ursache für die Änderung des Bewegungszustandes sind Kräfte. dp d m v m v m v ma F ( mv ) dt dt Massenstrom m [ F ] kg N s² Strömungsgeschwindigkeit allgemein: Größen G werden durch Ströme IG geändert dG IG dt Kraft: „Impulsstrom“ ändert Bewegungszustand „Grundgesetz der Dynamik“: F ma Masse des Objektes ändert sich nicht Dynamik von Massenpunkten 4 Kraftquellen Massenströme (elastische) Deformation Schwerkraft elektromagnetische Kräfte Kraftvermittlung Direkter Kontakt Impulsstromleiter: Felder Dynamik von Massenpunkten starre Leiter Zug- und Druckkräfte schlaffe Leiter Zugkräfte Gravitation elektromagnetische Felder Felder in der Mikrophysik 5 Kraftmessung Elastische Deformation Quelle Dynamik von Massenpunkten Objekt Quelle Objekt Länge Elektrischer Widerstand Elektrische Spannung Lichtdurchlässigkeit 6 3. Newtonsches Axiom Kraftwirkung zwischen 2 Objekten: Objekt 1 Objekt 2 F Ip p1 I p (1 2 ) F12 p2 I p( 2 1) = F21 actio = reactio Abgeschlossenes System: p i const . i Fi j 0 i,j Dynamik von Massenpunkten 7 Nicht abgeschlossene Systeme ! pMensch 0 Ip Ip Wagen pObjekt Boden Mensch: „Impulspumpe“ Boden: „Impulsreservoir“ vBoden = 0 p mR v Reservoirs: Dynamik von Massenpunkten mR Extensive Größe ändert intensive Größe nicht: Kapazität 8 Zusammensetzen von Kräften Mehrere Kräfte greifen an einen Massenpunkt an: FR F1 F2 F3 FR F1 F2 d p falls m const : F m a F1 FR R F 2 dt F3 Ursachen unterscheiden Sonderfall: FR 0 Keine Änderung des Bewegungszustands Gleichgewicht Bewegungszustand Ruhe: Statik Messen von Massen: Gleichgewicht mit Gewichtskraft Dynamik von Massenpunkten 9 Impulsströme beim Gleichgewicht Haftreibung I p FPO I p FBP I p FOB Schwerkraft I p FDO Gleichgewicht geschlossener Impulsstromkreis I p FOG Dynamik von Massenpunkten 10 Zerlegen von Kräften Spezielle Zerlegung: F Ft Fn Tangentialkraft Ft : Ft // p Normalkraft Fn : Fn p Änderung von p Änderung von e p Beispiel: schiefe Ebene Ft Fn Dynamik von Massenpunkten FG wirksame Kräfte: Schwerkraft Kontaktkraft Bewegung längs der Ebene Impulsänderung längs der Ebene schiefe Ebene kompensiert Fn Kontaktkraft Oberfläche 11 Elastische Deformation, Federkräfte Kraft wirkt auf Körper (elastische) Deformation Verschiebung der Atome elektrostatische Kräfte reversibel Formänderung in Kraftrichtung Formänderung auch zur Kraft (Querkontraktion) größere Kraftwirkung: (plastische) Deformation irreversibel Formänderung auch zur Kraft (Querkontraktion) Dynamik von Massenpunkten 12 Hookesches Gesetz Kraftgesetz: Abhängigkeit der Kraft von anderen Größen Felastisch F (l ) Lineare Näherung: Felastisch l Felastisch : rücktreibend Felastisch D l Federkonstante [ D] N m weiche Feder: kleines D starre Feder: großes D Federkonstante D hängt ab von: Dynamik von Massenpunkten Material Form der Feder 13 Reibungskräfte (äußere Reibung) 2 Objekte berühren sich: Kontaktkraft // Kontaktfläche FAntrieb FReibung Reibungskräfte wirken bewegungshemmend Gleichgewicht keine Bewegung : FHR FA max Schwellwert FA FHR Gleitreibung max FHR unabhängig von der Größe der Kontaktfläche max FHR ~ FNormal Haftreibung max FHR µHR FNormal Haftreibungszahl Dynamik von Massenpunkten Rauheit der Flächen Materialpaar 14 Reibungskräfte Gleitreibung max FA FHR Bewegung Gleichgewicht gleichförmige Bewegung max FA FGR FHR FGR unabhängig von der Größe der Kontaktfläche FGR unabhängig von der Geschwindigkeit FGR // ev FGR µGR FNormal FGR ~ FNormal Gleitreibungszahl Rauheit der Flächen Materialpaar Fremdkörpern zwischen Kontaktflächen Haftreibung Anschluss an Impulsreservoirs (Gegenkräfte) Gleitreibung Reibungsverluste Wärme Dynamik von Massenpunkten 15 Rollreibung FRollreibung abhängig von FRollreibung Kontaktfläche ändert sich dauernd Lösen des Kontaktes durch Abheben Normalkraft des Rades Materialpaar f FN r f: Rollreibungslänge Bewegliche Teile: Dynamik von Massenpunkten Deformation des Rades Rollreibung << Gleitreibung Räder Kugellager Wälzlager 16 Reibungszahlen Dynamik von Massenpunkten 17 Innere Reibung Objekt bewegt sich durch Fluid: Gleitreibung Gase Luftwiderstand Flüssigkeiten Strömungswiderstand Wärme unterscheiden laminare Strömung v klein FR b | v | ev Form des Objektes Größe Zähigkeit des Fluids turbulente Strömung v groß FR d v ² ev Dynamik von Massenpunkten Form des Objektes: cW Anströmfläche Dichte des Fluids 1 d cW A 2 18 cW - Werte Dynamik von Massenpunkten 19 Anwendung des 2. Newtonschen Axioms Ein Objekt: dp m a Fi dt i Berechnung der Beschleunigung des Objektes Berechnung von Kräften auf das Objekt Mehrere Objekte: Kräfte auf die Objekte dpi F ji dt j Objekte sind verbunden 3. Newtonsches Axiom Nebenbedingungen Beispiel: Atwoodsche Fallmaschine Dynamik von Massenpunkten 20 Kräfte bei Kreisbewegungen Zentripetalkraft: Tangentialkraft: Corioliskraft: v² FZP m ar m ² r er m er r Ft m r et Gradlinige und Kreisbewegung überlagern sich Radialbewegung: u const , const , r0 r (t ) 0 s (t ) r (t ) er (r0 u t ) er v u er ω r (t ) et dp dv F m dt dt F m 2 u et m ² r (t ) er Corioliskraft 21 Koordinatentransformationen Wie ändern sich die physikalischen Gesetze, wenn sich das Bezugssystem ändert? Gradlinige Bewegung t = t‘ y‘ y s * s x‘ w x Verschiebung gleichförmige Bewegung beschleunigte Bewegung (m 0) F F m aS Scheinkraft Spezialfall: „Dynamisches Gleichgewicht“ F 0 Dynamik von Massenpunkten 22 D‘Alembertsches Prinzip F 0 F m aS 0 m a m aS 0 F ma a aS Einer Änderung seines Bewegungszustandes (a) setzt ein Objekt eine „Trägheitskraft“ (- m a) entgegen, so dass es in dem mit a beschleunigten System ruht. Betrachtung im beschleunigten System manchmal anschaulicher! anfahrender Zug Bremswirkung auf Autoinsassen Zentrifugalkraft Frot . 0 FZP FZF Corioliskraft Dynamik von Massenpunkten 23 Corioliskraft yy(yy(t((t35t42t)01))) yyy((t(tt3)4)) yy((t0t12)) yy(yyt((0t(t1)t2)3)) yyy((t(t0t1)2)) yy((t0t1)) y (t0 ) xxx(x(t(x0tt(1x()2t)t3()4t))5 ) x(xxt(0x(tx)t1(2)(tt)34)) x(xt(x0t(x)1t)(2t)3 ) x(txx0(()tt12)) Cor.xls Dynamik von Massenpunkten x(t0 ) xx((tt01)) 26 Bewegung unter Krafteinfluss Wie bewegt sich ein Objekt, wenn Kräfte wirken? dv (t ) ma m Fi (t ) dt i Differentialgleichung Lösung: Funktion v(t), die die DGL erfüllt ds v (t ) dt Differentialgleichung Lösung: Funktion s(t), die die DGL erfüllt Mathematische Methoden: Integration der Bewegungsgleichung Numerische Näherungsmethoden (Euler-Cauchy): Anfangswerte für s (t0 ) ,v (t0 ) ,a (t0 ) ? (kleines) Zeitintervall t wählen v ( t ) v ( t ) a (ti ) t für spätere Zeitpunkte ti+1 = ti + t: i 1 i Dynamik von Massenpunkten s (ti1 ) s (ti ) v (ti ) t 27 „einfache“ Maschinen Aufgabe: Reduzierung der für eine Aufgabe erforderliche Kraft Dynamik von Massenpunkten 28 Beispiele für einfache Maschinen schiefe Ebene Hebel Flaschenzug Weg, auf dem die Kraft aufgewendet werden muss wird größer aber: Goldene Regel der Mechanik Was an Kraft gewonnen wird, geht an Weg verloren Größe, die beides berücksichtigt Dynamik von Massenpunkten Arbeit 29 Definition: Arbeit = Kraft . Weg F Fs eindimensional: s W Fs s [W] = Nm = J W > 0: Fs s W < 0: Fs s W = 0: Fs = 0 oder s = 0 speziell: Arbeit durch gleichmäßige Beschleunigung m 2 W m a s (vE v A2 ) 2 kinetische Energie : Dynamik von Massenpunkten Ekin Ekin 1 mv² 2 30 Arbeit bei Bewegungen im Raum s1 F Fs s2 s dreidimensional: W Fs s F s1 Fs2 s2 Fs F cos s1 s cos Fs2 0 W F s cos( F ,s ) : F s Skalarprodukt: Berechnung: Dynamik von Massenpunkten a b Zahl a x bx a b a y by a x bx a y by a z bz a b z z 31 Arbeitsdiagramm Fs Fs1 W Fs1 ( sE s A ) Rechteckfläche sE sA konstante Kraft: s Fs veränderliche Kraft: sE W FsII ( s ) ds sA sA Dynamik von Massenpunkten FsII Fläche unter der Kurve sE s 32 Arbeit (dreidimensional) Kraft nicht konstant: Wsa sb ? Weg in kleine Teilwege aufteilen, so dass dort F const. W F s über alle Teilarbeiten W summieren Wsa sb Fi si i si 0 sb Wsa sb F ds sa xb yb zb xa ya za Fx dx Fy dy Fz dz Arbeitsdiagramm für yx Dynamik von Massenpunkten 33 Energie Beschleunigungsarbeit aus der Ruhe: m W m a s vE2 Ekin 2 Nach Beschleunigungsphase keine Kraftwirkung: Arbeit ist im Bewegungszustand mit Ekin „gespeichert“ m p² Bewegungszustand: p Ekin v² 2 2m Definition: Energie: gespeicherte Arbeit Speichermedium: Energieträger Bewegung Wärme Elektrizität Dynamik von Massenpunkten 34 Potentielle Energie Arbeit unter Einfluss einer variablen Hangabtriebskraft : y a Wab hängt nicht von der Wahl des Weges ab, sondern nur von a und b b x Wab Ekin 0 Umgekehrter Weg: E 'kin Wba Wab 0 Verlust an Ekin Gewinn an Höhe Potentielle Energie E ' pot 0 Kann für Verrichtung von Arbeit genutzt werden F ds a E ' pot Wba Dynamik von Massenpunkten b 35 Energieerhaltung in der Mechanik a: E pot (a) , Ekin (a) Bewegung von a b: b: E pot (b) , Ekin (b) F ds Ekin E pot b W(ab) unabhängig vom Weg Wab a Ekin E pot 0 ( Ekin E pot ) 0 Ekin E pot Emech ,ges const F: konservative Kraft F ds 0 F ds unabhängig vom Weg Beispiele: Schwerkraft elastische Deformation elektrostatische Kraft Dynamik von Massenpunkten Nicht konservative Kräfte: Reibung plastische Deformation 36 Anwenden von Epot Kraftwirkung auf das Objekt Wba (2) a (1) (1) b E pot (a gegenüber b) E pot (1) Wba (1) Bezugspunkt Wahl der Problemstellung anpassen Nur Änderungen von Ekin und Epot relevant Dynamik von Massenpunkten 37 Räumlicher Verlauf von Epot Fk eindimensional: Örtlicher Verlauf von Epot(x) sei bekannt: dW Fk ( x)dx dE pot ( x) Sonderfälle: dE pot ( x) Art des Extremums: dreidim.: dx 0 Fk Fk ( x) dE pot ( x) dx Gleichgewicht stabiles Gleichgewicht Minimum Maximum labiles Gleichgewicht „Flachzone“ indifferentes Gleichgew. dW Fk ( s ) ds dE pot ( s ) Fk ( s ) grad ( E pot ) grad (( x, y, z )) : ( / x, / y, / z ) Dynamik von Massenpunkten Richtung größten Anstiegs von 38 Berechnen der Arbeit bei konservativen Kräften konservative Kraft: Zonen gleicher Epot Äquipotentialflächen Richtung der Kraft (Richtung des Gradienten) senkrecht zu den Äquipotentialflächen Berechnung der Arbeit: Beispiele: Dynamik von Massenpunkten Wege aufteilen in Wege - auf Äquipotentialflächen - längs des Gradienten Schwerkraft: Höhenlinien elektrostatische Kraft: Äquipotentialflächen 39 Beschreibung des Bewegungszustandes Newton: Bewegungszustand: Änderung: s,p dp F m v m v m s m s dt Bewegungsgleichung Energie: Bewegungszustand: Ekin , E pot Änderung: W Ekin E pot Erste Integrale der Bewegungsgleichung Kein zeitlicher Verlauf der Bewegung bestimmbar! Dynamik von Massenpunkten 40 Allgemeiner Energiesatz der Mechanik Bewegung unter Einfluss von konservativen- und anderen Kräften: b W ( Fk Fnk ) ds Wk Wnk Ekin E pot Wnk a Wnk Ekin E pot Eges ,mech Nicht-konservative Kräfte ändern die Gesamtenergie eines Objektes Energiebilanz: Objekt Eges Epot, Ekin Bilanzhülle Dynamik von Massenpunkten Kontinuitätsgleichung: Zeitl. Änderung der Energie in der Bilanzhülle = Strom/Fluss durch die Bilanzhülle + : hinein 41 Verändern der Epot eines Objektes steigern: Bewegung unter Einfluss einer Kraft Fk von a b b W Fk ds 0 E pot W 0 a Ekin W 0 Bewegung unter Einfluss von Fk und Fnk von a b W Wk Wnk Ekin E pot Wnk Ekin Sonderfall: Ekin = 0 (gleichförmige Bewegung) verringern: Bewegung unter Einfluss einer Kraft Fk von a b W Fk ds 0 E pot W 0 b Ekin 0 a Bewegungen unter Einfluss von konservativen Kräften aus der Ruhe senken die potentielle Energie Dynamik von Massenpunkten 42 Leistung Energiestrom: dW dE : P dt dt Nm [ P] W s Momentanleistung ds dW F ds P F F v dt Momentangeschwindigkeit Dynamik von Massenpunkten 43