Mikrorobotik für die minimalinvasive Ophthalmochirurgie
Werbung

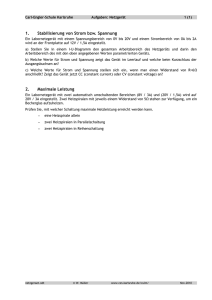
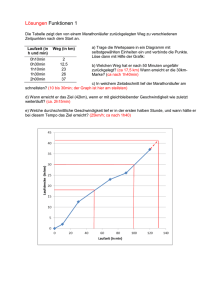
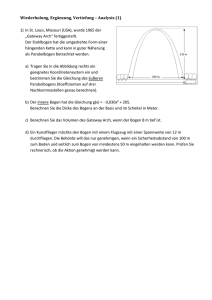
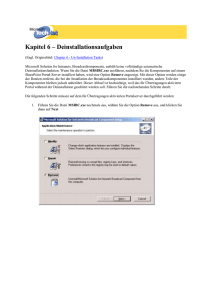
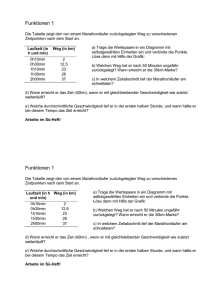
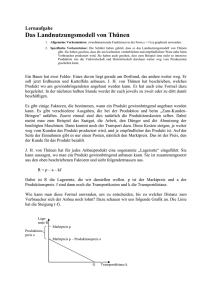
SCHWERPUNKT AMD/NETZHAUT Mikrorobotik für die minimalinvasive Ophthalmochirurgie Am Institut für Robotik und Intelligente Systeme an der ETH Zürich werden in Zusammenarbeit mit Schweizer Augenkliniken (Triemli Spital Zürich, Inselspital Bern) verschiedene Robotersysteme für ophthalmochirurgische Eingriffe entwickelt. Jedes minimalinvasive Robotersystem ist zur Behandlung spezifischer Augenerkrankungen, wie zum Beispiel die Altersbedingte Makuladegeneration, den retinalen Venenverschluss und die Diabetische Retinopathie, entwickelt worden. Franziska Ullrich und Prof. Bradley J. Nelson vom Multi-Scale Robotics Lab der ETH Zürich erörtern die Möglichkeit einer robotergestützten gezielten intravitrealen Medikamentenapplikation sowie die Entwicklung von robotischen Systemen zur Unterstützung bei minimalinvasiven chirurgischen Eingriffe. D amit das Gesundheitssystem der Überalterung und dem damit verbundenen Anstieg altersbedingter Augenerkrankungen gerecht werden kann, müssen diese präzise, sicher und auch wirt­ schaftlich behandelt werden. Aus diesem Grund befasst sich die Forschung mit der Entwicklung von magnetisch gesteuerten Mikro­ robotern, die in vielen Bereichen in der Augenheilkunde denkbar sind. Ein zukünftig möglicher Einsatz ist beispielsweise die robo­ tergestützte gezielte intravitreale Medikamentenapplikation oder die Unterstützung durch robotische Systeme bei minimalinvasiven chirurgischen Eingriffen am Auge. Am Institut für Robotik und Ophthalmoskop & CCD-Kamera BIOM Arbeitsbereich Elektromagnete (8x) Abb. 1: Elektromagnetisches System (OctoMag) zur Steuerung von gebundenen und drahtlosen Mikrorobotern innerhalb des Auges. 32 DER AUGENSPIEGEL Intelligente Systeme der ETH Zürich (ETHZ) werden in Zusam­ menarbeit mit Schweizer Augenkliniken (Triemli Spital Zürich, Inselspital Bern) verschiedene minimalinvasive Robotersysteme für ophthalmochirurgische Eingriffe entwickelt, die jeweils für spezifi­ sche Augenerkrankungen, wie zum Beispiel AMD, Netzhautvenen­ verschluss und Diabetische Retinopathie, eingesetzt werden sollen. Assistierende Roboter in der Augenheilkunde Ophthalmologische Eingriffe müssen möglichst zügig, mit hoher Sicherheit und großer Präzision erfolgen. Da die bei Operationen am Auge wirksamen Kräfte oft kleiner als das menschliche Wahr­ nehmungslimit sind, muss der Chirurg viel Erfahrung und Fin­ gerfertigkeit mitbringen (Gupta et al. 1999; Jagtap et al. 2004). Mit Hilfe robotischer Hilfstechnologien können mögliche Prob­ leme, die durch die auftretenden Kräfte verursacht werden, ver­ mindert beziehungsweise sogar verhindert werden und sie erlau­ ben die Durchführung sicherer und hochpräziser Operationen. Derzeit bestehen bereits einzelne Technologien, die in der Augen­ chirurgie assistieren, zum Beispiel teleoperierende Roboter wie das Da-Vinci-System (Tsirbas et al. 1992; Bourla et al. 2008), ein Parallelroboter für vitreoretinale Eingriffe (Nakano et al. 2009) sowie kooperativ gesteuerte (Uneri et al. 2010) und tremorreduzie­ rende Technologien (Maclachlan et al. 2012). Alle diese Systeme unterstützen den Augenchirurg während der Operation, wobei der Mensch weiterhin für Entscheidungsfindung und Instrumenten­ führung verantwortlich ist. Medikamentengabe in das Auge Hornhaut und Bindehautepithel bilden eine dichte physikalische Barriere, die das Auge vor externen Einwirkungen schützt. Bei JANUAR 2016 20 2020 00 10050 100 150100 200150 250200 150 200 300250 250 0 300 50 300 150 200 250 300 300250 6060 4040 20 20 0 100500 150100 200150 50 100 80 60 60 40 40 20 20 0 250 50 50200 150 80 gemessenes Feld [mT] 4040 8080 gemessenes gemessenes Feld Feld [mT] [mT] 0 050 50 6060 100 Distanz zum Arbeitsbereich [mm] 0 10035mT 200150 in y250200 50 in150100 x, 500mT/m Distanz zumDistanz Arbeitsbereich [mm] zum Arbeitsbereich [mm] 80 35 mT x 500mT/m ininx,x,500 mT/m in35 mT 500mT/m in500mT/m y 35mTininx,x,500 mT/m 500mT/m xinx, 35mT in x,in500mT/m in x35mTin in yin y 35mT in xx, 35mT gemessenes Feld [mT] gemessenes Feld [mT] 20 20 80 positivepositive x-Achse positive x-Achse x-Achse negativenegative x-Achse negative x-Achse 60 x-Achse positivepositive y-Achse positive y-Achse y-Achse negativenegative y-Achse negative y-Achse y-Achse positivepositive z-Achse positive z-Achse 40 z-Achse gemessenes Feld [mT] 40 40 gemessenes Feld in [mT] 60 60 in Gradient 35mT in35 mT x,in kein 35mT inx,x, kein kein Gradient 35mT x, Gradient kein Gradient 8080 gemessenes Feld [mT] gemessenes gemessenesFeld Feld[mT] [mT] 80 80 50 0 50 20 60 40 20 0 300 250 100 50 100 200 150 100 150300 250 200 200150300 250 250200 300 300250 Distanz zumDistanz Arbeitsbereich [mm] mit[mm] zumDistanz Arbeitsbereich [mm]im Distanz zum Arbeitsbereich zum Arbeitsbereich [mm]zum Arbeitsbereich [mm] zum Arbeitsbereich [mm] Abb. 2: Abfall desArbeitsbereich Magnetfelds der Distanz zumDistanz zentralen Arbeitsbereich OctoMag. Distanz zumDistanz Arbeitsbereich [mm] Distanz zum [mm] Distanz zum Arbeitsbereich [mm] 80 80 35mT in x, 35mT 500mT/m y in x,in500mT/m in y 35mT in x, 500mT/m in y 80 100 35mT in x, 35mT 500mT/m z in x,in500mT/m in z 35mT in x, 500mT/m in z 20 40 200 50 0 300 50 gemessenes Feld [mT 200 40 60 60 40 20 100 SCHWERPUNKT AMD/NETZHAUT 150 200 250 300 Distanz zum Arbeitsbereich [mm] 0 10035mT 200150 in z250200 50 in150100 x, 500mT/m 300250 300 0 0 100 150 250 300 300 50 50 Distanz 10050 150100 200 200150 50-300 250200 mm 300250 zum Arbeitsbereich 300 100 100 80 80 60 60 40 40 20 20 Distanz zumDistanz Arbeitsbereich [mm] zum Arbeitsbereich [mm] 35 mT 35mTininx,x,500 mT/m 500mT/m zin z in z 35mT in x,in500mT/m 100 gemessenes Feld [mT] 40 40 gemessenes Feld [mT gemessenes 20 positive x-Achse positive x-Achse positive z-Achse negative x-Achse negative x-Achse positive y-Achse positive y-Achse negative y-Achse negative y-Achse positive z-Achse positive z-Achse 60 gemessenes gemessenes Feld Feld [mT] [mT] 60 gemessenes Feld [mT gemessenes gemessenes Feld [mT 40 80 60 40 20 Distanz Arbeitsbereich [mm] zum Arbeitsbereich [mm] Distanz zum zumDistanz Arbeitsbereich [mm] 100 100 gemessenes Feld [mT] gemessenes Feld [mT] gemessenes Feld [mT] gemessenes Feld [mT] gemessenes gemessenesFeld Feld[mT] [mT] erte chirurgische Instrumente aus einem flexiblen Körper (zum topischer Behandlung des Auges muss das80Medikament diese 80 60 80 Beispiel einem Katheter) mit einem magnetischen Kopf, welcher Barriere passieren, wobei in der Regel weniger als fünf Prozent 60 60 60 in einem extern angelegten Magnetfeld bewegt wird. Ein kontrol­ Medikaments in das Auge eindringen (Davies et 40 des gegebenen 40 40 40 40 40 liertes Magnetfeld und die dazugehörigen magnetischen Gradi­ al. 2000; Urtti et al. 2006). Deshalb werden verschiedene Medi­ 20 20 20 20 20 kamente intravenös oder intravitreal verabreicht, enten können durch Permanentmagnete (Stereotaxis 2015) oder da die benötigten 20 0 Medikamentendosierungen 0 0 0 Elektromagnete (AeonScientific 2015) erzeugt werden. Darüber in300250 der hinteren Augenkammer (Netz­ 10050 150100 200150 250200 100500 150100 200150 250200 300250 300 50 300 050 50 100 zumDistanz 150 zum Arbeitsbereich 200 100 150 200 250 300 Distanz Arbeitsbereich [mm] 250 Distanz50sind. zumDistanz Arbeitsbereich [mm] [mm] 300 zum Arbeitsbereich [mm] hinaus haben sich magnetisch geführte ungebundene Mikrorobo­ haut, Glaskörper, Aderhaut) häufig relativ hoch Sowohl bei Distanz zum Arbeitsbereich [mm] Distanz zum Arbeitsbereich [mm] ter als chirurgische Instrumente für die gezielte Wirkstoffabgabe der intravenösen als auch intravitrealen Medikamentenapplikation im Auge etabliert (Chatzipirpiridis et al. 2014). kann es zu Gewebsschäden und auch unerwünschten Nebenwir­ Das erste magnetisch gesteuerte Instrument für Ophthalmologie kungen wie zum Beispiel Glaskörperblutungen, Netzhautablösung wurde 1974 von Charles D. Kelman vorgestellt (Kelman 2001). oder Endophthalmitis kommen (Kuno et al. 2011). Die Entwick­ Seitdem haben sich mikrorobotische Systeme als In-vivo-Werk­ lung von Systemen, die über lange Zeit Wirkstoff in der hinte­ zeuge für minimalinvasive Augenchirurgie fortentwickelt (Flynn ren Augenkammer abgeben, ist deshalb von zunehmendem Inte­ et al. 1998; Nelson 2006). Im Jahr 2010 wurde ein elektromag­ resse. Intravitreale Implantate können mit einer großen Auswahl netisches System zur Steuerung von drahtlosen Mikrorobotern verschiedener Medikamente beladen werden und ermöglichen die im Glaskörper des Auges entwickelt, der so genannte OctoMag Abgabe eines Wirkstoffes über längere Zeit nach nur einer einzel­ (Kummer et al. 2010). Das System besteht aus acht Elektromag­ nen Injektion. neten mit weichmagnetischem Kern, die in einer Halbkugel ange­ Bislang wurden mehrere intravitreale Implantate entwickelt und ordnet sind. Mithilfe dieses Systems (siehe Abbildung 1), können in Studien getestet (Kane et al. 2008; Jaffe et al. 2011; Thrima­ gezielt magnetische Felder (bis zu 40 mT) und Gradienten (bis withana et al. 2011). Keines dieser Implantate verfügt jedoch über zu 1 T/m) in einem Arbeitsbereich von 2x2x2 cm erzeugt wer­ die Fähigkeit, sich kontrolliert im Auge zu bewegen, um möglichst den, wobei die Größe des Arbeitsbereiches ungefähr den Dimen­ nahe am pathologischen Prozess stationiert zu werden. Außerdem sionen eines menschlichen Auges entspricht. Ein Computer regelt erfordert die Entfernung der bisherigen Implantate häufig eine Vit­ den Strom in jedem der acht Elektromagnete und überwacht den rektomie und beinhaltet die damit verbundenen Risiken. Um diese Arbeitsbereich mithilfe einer CCD-Kamera und einem Weitwin­ Nachteile zu überwinden, entwickelt das Institut für Robotik und kel BIOM, sodass große Teile der Netzhaut beobachtet werden Intelligente Systeme an der ETH Zürich mobile und steuerbare können. Abbildung 2 stellt den steilen Abfall des Magnetfeldes Mikroroboter, mit deren Hilfe die gezielte Arzneimittelabgabe in mit zunehmender Entfernung vom zentralen Arbeitsbereich dar. der hinteren Augenkammer ohne Vitrektomie ausgeführt werden kann. Indem der mit Wirkstoff beladene Mikroroboter gezielt an den erkrankten Bereich im Auge gesteuert wird, ergibt sich auf­ grund des Fickschen Diffusionsgesetzes bei gleicher applizierter Medikamentendosis eine höhere Konzentration des Wirkstoffs. 60 60 Magnetische Steuerung ophthalmischer Mikroroboter Magnetisch gesteuerte Instrumente sind aufgrund ihrer hohen Fle­ xibilität, ihrer Stabilität und Präzision und gleichzeitig reduzierter Perforationsgefahr des Gewebes vielversprechende Hilfsmittel für minimalinvasive Eingriffe (Ernst et al. 2004; Moreno et al. 2009; Nguyen et al. 2010). Typischerweise bestehen magnetisch gesteu­ JANUAR 2016 Abb. 3: Intravitrealer Mikroroboter in einer 23-Gauge-Injektionsnadel. DER AUGENSPIEGEL 33 SCHWERPUNKT AMD/NETZHAUT Abb. 4: Ein Mikroroboter folgt einer vorherbestimmten Trajektorie (gestrichelte Linie) entlang einer Netzhautvene in einem Augenmodel. Im Abstand von 300 mm, was der Entfernung zwischen Auge und Herz entspricht, werden nur noch fünf Prozent des angeleg­ ten Magnetfeldes gemessen. Das beschriebene System bietet hohe Präzision während medizinischer Eingriffe und ermöglicht eine Kraftrückkopplung unterhalb der vom Menschen wahrnehmbaren Kraft. Der OctoMag wird über einen Joystick vom behandelnden Augenchirurgen gesteuert und ermöglicht damit Teleoperation. Sicherheit für Patienten Aufgrund der hohen Sicherheit trifft die Nutzung von Magnet­ feldern und Gradienten in der Chirurgie auf zunehmendes Inte­ resse. Magnetfelder dringen tief ins menschliche Gewebe ein. Aufgrund der geringen magnetischen Suszeptibilität von biologi­ schem Gewebe schaden schwache Magnetfelder dem Menschen nicht und sind mit hoher Sicherheit für den Patienten verbunden (Schaefer et al. 2010; Schenk 2010; Shellock 2010). Um Mikro­ roboter im Auge zu bewegen, generiert das elektromagnetische System OctoMag Magnetfelder bis zu 40 mT, das in etwa einem Hundertstel der Feldstärke eines konventionellen Magnetresonanz­ tomographens entspricht. Zudem fallen die generierten Felder mit sich vergrößernder Distanz zum Arbeitsbereich rapide ab, gezeigt in Abbildung 2. Minimalinvasive intravitreale Mikroroboter sind zylindrisch mit Außendurchmesser von 285 µm und passen damit in eine 23-Gauge-Injektionsnadel (Abb. 3), die zur Injektion des Roboters in den Glaskörper des Patienten verwendet wird (Ullrich et al. 2013). Aufgrund von biokompatiblen Polymer- oder MetallBeschichtungen sind die Mikroroboter für das Auge unschädlich (Sivaraman et al. 2012). Die Sicherheit für den Patienten ist durch kleinere Einschnitte, weniger Narbenbildung und reduzierte Kom­ plikationen während des medizinischen Eingriffs gewährleistet. Hohe Präzision Zurzeit existiert kein kommerziell verfügbares intravitreales Implantat, das die Fähigkeit zur gezielten Medikamentenabgabe in der hinteren Augenkammer besitzt, ohne das umgebende Gewebe zu beeinflussen. Da der mit Wirkstoff beladene Mikroroboter mit­ tels Magnetfeldern direkt zum pathologischen Focus gesteuert wird, erhöht sich die Präzision der Medikamentenabgabe deutlich, sodass die Dosis verringert werden kann. Die Augenheilkunde 34 DER AUGENSPIEGEL tendiert zu immer kleiner werdenden Instrumenten, wodurch die Präzision und die Verwendung der Geräte immer mehr zu einer kritischen Größe wird. Dieser Trend wird durch die Entwicklung magnetisch gesteuerter minimalinvasiver Mikroroboter unter­ stützt und gleichzeitig optimiert. Kraftrückkopplung Studien haben gezeigt, dass 75 Prozent der bei Augenoperati­ onen auftretenden Kräfte kleiner als 7.5 mN sind und nur 20 Prozent dieser Kräfte von einem Augenchirurg gespürt wurden, da sie unter dem menschlichen Wahrnehmungsvermögen liegen (Gupta et al. 1999). Aufgrund dieser Begrenzungen nimmt der Operateur die auftretenden Kräfte häufig nicht wahr und muss sich somit auf seine Erfahrung, sein Training und seine Finger­ fertigkeit verlassen. Ein elektromagnetisches System ermöglicht die direkte Rückkopplung von Kraft und Drehmoment, da die angelegten Magnetfelder und Gradienten sowie die Magnetisie­ rung des Instruments bekannt sind. Die Kraft F in [N], die ein intravitrealer Mikroroboter auf das Gewebe ausübt, leitet sich von der Stärke der magnetischen Gradienten und der Magneti­ sierung des Roboters M als T " ∂B ∂B ∂B % F =$ ' M # ∂x ∂y ∂z & T = M ×B T ab, wobei B das Magnetfeld in [T] beschreibt. " ∂B ∂B ∂B % Das Drehmoment T F = $ ausübt, kann' über M in [Nm], das der Mikroroboter # ∂x ∂y ∂z & T = M ×B berechnet werden. Indem man die maximal ausgeübten Kräfte und Momente begrenzt, wird das Risiko einer Netzhautschädigung deutlich reduziert. Anwendung von Mikrorobotern im Auge Magnetisch gesteuerte Mikroroboter können für verschiedene Eingriffe sowohl in der vorderen als auch in der hinteren Augen­ kammer eingesetzt werden. JANUAR 2016 SCHWERPUNKT AMD/NETZHAUT Vordere Augenkammer: Zur automatisierten Kapsulorhexis wurde ein magnetisch-mechanisches System mit flexiblem Körper und magnetischer Spitze entwickelt (Ullrich et al. 2014). Die Kapsulo­ rhexis beschreibt den Prozess des Aufschneidens der Linsenkap­ sel während einer Kataraktoperation und zielt darauf ab, eine per­ fekt kreisförmige Öffnung zu erstellen, die eine bestimmte Größe, Form und Lokalisierung aufweist. Das magnetisch gesteuerte Ins­ trument besteht aus einem flexiblen Katheter (Außendurchmesser 600 µm) mit einer magnetischen Spitze. Die Katheterspitze wird durch einen kleinen Einschnitt in die vordere Augenkammer einge­ führt. Die Längsbewegung des Katheters wird durch einen piezo­ elektrischen Aktuator, die seitliche Bewegung über Magnetfelder gesteuert, sodass die Bewegung der scharfen Spitze einen perfek­ ten Kreis mit definiertem Durchmesser beschreibt. Bei In-situExperimenten wurden eine mittlere radiale Genauigkeit von 136 µm und eine Wiederholbarkeit von 18 µm verifiziert. Hintere Augenkammer: Drahtlos im Auge gesteuerte Mikroro­ boter können unter anderem für die gezielte Arzneimittelabgabe in ophthalmologischen Anwendungen, wie zum Beispiel bei der Behandlung von AMD, verwendet werden. Ein solcher Mikro­ roboter mit einem Wirkstoffreservoir wurde entwickelt und kann in die Nähe der Netzhaut gesteuert werden, ohne das umgebende Gewebe wesentlich zu traumatisieren. Mit Hilfe entsprechender Algorithmen wird der Mikroroboter auf einer vorher definierten Trajektorie bewegt, so wie dies in Abbildung 4 dargestellt ist (Ber­ geles et al. 2012). Mikroroboter, die mit kleinsten Nadeln ausge­ stattet sind, wurden dazu benutzt, einzelne Venen auf der Chorio­ allantoismembran (CAM) eines Hühnerembryos zu punktieren, um die Möglichkeit einer Injektion in Netzhautvenen zu demons­ trieren. Die Kräfte, die der magnetisch gesteuerte Mikroroboter dabei auf die Vene ausübt, werden in Echtzeit gemessen und auf­ gezeichnet. Intravitreale Mikroroboter zeigen somit vielverspre­ chende Möglichkeiten beim gezielten Arzneimitteltransport und als Instrumente für die minimalinvasive Augenchirurgie. Sie kön­ nen aber auch zur Diagnostik eingesetzt werden. Ein Mikroroboter wurde mit lumineszierendem Material beschichtet, das in Gegen­ wart von Sauerstoff die Intensität der Lumineszenz verändert (Ergeneman et al. 2012). Somit kann die Sauerstoffkonzentration im Glaskörper des Auges gemessen werden. Nach Beendigung eines durch einen Mikroroboter assistierten chirurgischen Ein­ griffs, wird der Mikroroboter mittels eines magnetischen Werk­ zeugs wieder aus dem Auge entfernt. Experimente am lebenden Auge: Mittels In-vivo-Experimenten an insgesamt fünf Augen von lebenden Kaninchen, konnten Mobilität und Steuerbarkeit von magnetisch gesteuerten Mikrorobotern im Auge untersucht werden (Ullrich et al. 2013). Drei der Augen wur­ JANUAR 2016 Abb. 5: Goldbeschichteter, zylindrischer Mikroroboter im Kaninchenauge. den vitrektomiert und mit Silikonöl (Viskosität 1.000 mm2/s bei 25 Grad Celsius) oder physiologischer Kochsalzlösung (Balan­ ced Salt Solution, BSS) befüllt. Mit einer 23-Gauge-Injektions­ nadel wurde in jedes Auge ein Mikroroboter mit einem Außen­ durchmesser von 285 µm injiziert (Abb. 5). Anschließend wurde der Kopf des Kaninchens so im OctoMag platziert, dass sich das Auge im Arbeitsbereich des elektromagnetischen Systems befin­ det. Einem experimentellen Protokoll folgend, wurde der Mikro­ roboter innerhalb des lebenden Auges mit verschiedenen Rotati­ onsfrequenzen, Magnetfeldstärken und magnetischen Gradienten bewegt. Die Experimente zeigen, dass minimalinvasive Mikroro­ boter über gute dreidimensionale Mobilität verfügen und sowohl Rotationen als auch Translationen im Auge ermöglichen, unab­ hängig vom umgebenden Medium (Glaskörper, Silikonöl, BSS). Zukünftige intravitreale Mikroroboter Die Entwicklung magnetisch gesteuerter Mikroroboter eröffnet viele neue Möglichkeiten als Hilfsmittel in der Augenheilkunde. Dies betrifft zum Beispiel die gezielte Medikamentenapplikation als auch minimalinvasive chirurgische Eingriffe. In Zukunft kann die Effizienz von ophthalmologischen Eingriffen mittels dieser magnetisch gesteuerten Instrumente verbessert werden, da unter anderem eine hohe Präzision besteht und die entstehenden Kräfte rückgekoppelt werden, um so die Gewebstraumatisierung auf ein Minimum zu beschränken. Literatur auf Anfrage in der Redaktion. Franziska Ullrich Institut für Robotik und Intelligente Systeme (IRIS) an der ETH Zürich E-Mail: [email protected] DER AUGENSPIEGEL 35