Vektorrechnung - Hochschule Esslingen
Werbung

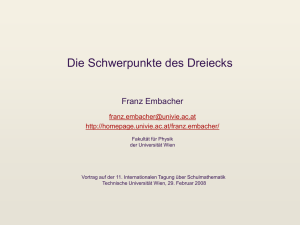
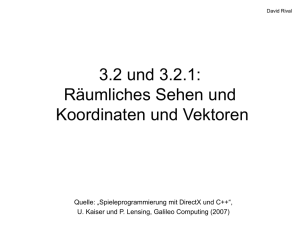
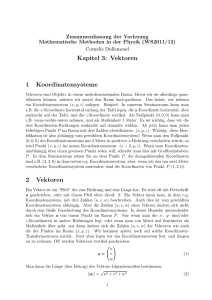
Vektoralgebra Anwendungen der Vektorrechnung VEKTORRECHNUNG Prof. Dr. Dan Eugen Ulmet Hochschule Esslingen März 2011 1/64 Vektoralgebra Anwendungen der Vektorrechnung Overview 1 Vektoralgebra 2 Anwendungen der Vektorrechnung 2/64 Vektoralgebra Anwendungen der Vektorrechnung Was sind Vektoren ? Vektoren werden geometrisch definiert als Pfeilklassen: Strecken mit gleichem Betrag, gleicher Richtung und Orientierung. 3/64 Vektoralgebra Anwendungen der Vektorrechnung Was sind Vektoren ? Vektoren werden geometrisch definiert als Pfeilklassen: Strecken mit gleichem Betrag, gleicher Richtung und Orientierung. Physikalische Interpretation als Kräfte, Geschwindigkeiten etc. (Mechanik, Festigkeitslehre, Elektrotechnik ..) 3/64 Vektoralgebra Anwendungen der Vektorrechnung Was sind Vektoren ? Vektoren werden geometrisch definiert als Pfeilklassen: Strecken mit gleichem Betrag, gleicher Richtung und Orientierung. Physikalische Interpretation als Kräfte, Geschwindigkeiten etc. (Mechanik, Festigkeitslehre, Elektrotechnik ..) Vektoren werden algebraisch definiert als geordnete Zahlenpaare oder Zahlentripel. 3/64 Vektoralgebra Anwendungen der Vektorrechnung Was sind Vektoren ? In der Physik unterscheiden wir zwei Typen von Größen: Skalare Größen, die durch die Angabe einer Zahl beschrieben werden können: Zeit, Masse, Volumen etc. 4/64 Vektoralgebra Anwendungen der Vektorrechnung Was sind Vektoren ? In der Physik unterscheiden wir zwei Typen von Größen: Skalare Größen, die durch die Angabe einer Zahl beschrieben werden können: Zeit, Masse, Volumen etc. Vektorielle Größen, die durch mehrere Zahlenangaben bestimmt werden, z.B. Kraft: nicht nur Größe (Betrag) sondern auch Richtung und Orientierung sind wichtig - analog Geschwindigkeit etc. 4/64 Vektoralgebra Anwendungen der Vektorrechnung Was sind Vektoren ? In der Physik unterscheiden wir zwei Typen von Größen: Skalare Größen, die durch die Angabe einer Zahl beschrieben werden können: Zeit, Masse, Volumen etc. Vektorielle Größen, die durch mehrere Zahlenangaben bestimmt werden, z.B. Kraft: nicht nur Größe (Betrag) sondern auch Richtung und Orientierung sind wichtig - analog Geschwindigkeit etc. Nach dem physikalischen Vorbild des Kraftbegriffs definieren wir: Definition: Ein Vektor ist eine gerichtete, orientierte Strecke im Raum. Dabei werden diejenigen Pfeile” als gleich ” angesehen, die durch Parallelverschiebung ineinander übergehen. 4/64 Vektoralgebra Anwendungen der Vektorrechnung Was sind Vektoren ? → Bezeichnung: − a Vektoren besitzen Länge (Betrag), Richtung und Orientierung. Zwei Vektoren sind gleich, wenn sie in Betrag, Richtung und Orientierung übereinstimmen.Der Vektor mit dem Betrag Null → heisst Nullvektor − o . − → a 5/64 Vektoralgebra Anwendungen der Vektorrechnung Was sind Vektoren ? Definiert werden hier sogenannte freie“ Vektoren; der ” Anfangspunkt des Pfeils ist beliebig. In den Anwendungen sind noch gebräuchlich: linienflüchtige Vektoren: der Anfangspunkt des Pfeils kann auf einer Geraden gewählt werden. ortsfeste Vektoren mit wohlbestimmtem Anfangspunkt 6/64 Vektoralgebra Anwendungen der Vektorrechnung Addition von Vektoren Definition: Zwei Vektoren werden addiert, indem man den Anfangspunkt des einen Vektors im Endpunkt des anderen Vektors anhängt. − → b → − − → a − b − → a → − − → a + b − → a − → b 7/64 Vektoralgebra Anwendungen der Vektorrechnung Multiplikation eines Vektors mit einem Skalar → Definition: Unter s · − a mit s > 0 verstehen wir einen Vektor, → dessen Richtung und Orientierung mit − a übereinstimmt, aber mit → − der s-fachen Länge von a . Ist s negativ, so dreht sich noch zusätzlich die Orientierung um. → 3− a − → a 8/64 Vektoralgebra Anwendungen der Vektorrechnung Rechenregeln → − → − − → → a + b = b + − a → − → − → → s(− a + b ) = s− a + sb → → → (s + t)− a = s− a + t− a → → |s · − a | = |s| · |− a| 9/64 Vektoralgebra Anwendungen der Vektorrechnung Punkte und Vektoren Zwei Punkte P1 (x1 |y1 |z1 ) und P2 (x2 |y2 |z2 ) definieren den Vektor x2 − x1 −−−→ P1 P2 = y2 − y1 z2 − z1 10/64 Vektoralgebra Anwendungen der Vektorrechnung Algebraisierung der Vektorrechnung Der geometrische Vektorbegriff soll zahlenmäßig erfasst werden. Dazu wählen wir drei Vektoren der Länge 1 aus, die paarweise aufeinander orthogonal stehen. Weiter legen wir die Reihenfolge (gegenseitige Orientierung) mit der Rechtsschrauben-Regel” fest. ” 11/64 Vektoralgebra Anwendungen der Vektorrechnung Algebraisierung der Vektorrechnung Alle Vektoren im Raum können als Linearkombination der → → − − → − Einheitsvektoren i , j , k dargestellt werden, die wir uns in den Achsen eines kartesischen Koordinatensystems denken. a → 1 − → − → − → − a = a1 i + a2 j + a3 k = a2 a3 12/64 Vektoralgebra Anwendungen der Vektorrechnung Algebraisierung der Vektorrechnung Die Grundrechenoperationen übertragen sich damit auf die Komponenten: Gleichheit von Vektoren a1 b1 a1 = b1 a2 = b2 a2 = b2 ⇐⇒ a3 b3 a3 = b3 Addition und Subtraktion a1 b1 a1 ± b1 a2 ± b2 = a2 ± b2 a3 b3 a3 ± b3 S-Multiplikation a1 s · a1 s · a2 = s · a2 a3 s · a3 13/64 Vektoralgebra Anwendungen der Vektorrechnung Länge (Betrag) eines Vektors x3 a3 − → a a2 a1 x − → a∗ x2 14/64 Vektoralgebra Anwendungen der Vektorrechnung Länge (Betrag) eines Vektors − → ∗ |a | = a2 + a22 1 → − |− a| = |→ a ∗ |2 + a32 = a12 + a22 + a32 15/64 Vektoralgebra Anwendungen der Vektorrechnung Anwendung: Normierung eines Vektors − − Normierung eines Vektors → a auf die Länge 1. Einsvektor → e a. − → − → ea = a → |− a| − Vektor der Länge 1 mit Richtung und Orientierung wie → a. Praxisanwendung: Computer Aided Design and Manufacturing (CAD/CAM), Prozesskette Karosserie 16/64 Vektoralgebra Anwendungen der Vektorrechnung Die Richtung eines 2D Vektors − α =Winkel zwischen x1 -Achse und → a: x2 a − → a = 1 a 2 3 6 α - α= arctan aa21 arctan aa21 + π x1 , a1 > 0 , a1 < 0 17/64 Vektoralgebra Anwendungen der Vektorrechnung Die Richtung eines 3D Vektors. Richtungscosinusse − αk =Winkel zwischen xk -Achse und → a; x3 6 ak . → |− a| a1 → − a = a2 3 a3 α3 α 2 α1 cos αk = -x2 x1 18/64 Vektoralgebra Anwendungen der Vektorrechnung Die Richtung eines 3D Vektors. Richtungscosinusse Beispiele : − → a = 1 ; −1 1 − → b = √1 ; 2 α = −π/4 α1 = α2 = π/3, α3 = π/4 19/64 Vektoralgebra Anwendungen der Vektorrechnung Die Richtung eines 3D Vektors. Richtungscosinusse − Für einen Vektor → a und seine Richtungscosinusse cos αk gilt: cos2 α1 + cos2 α2 + cos2 α3 = 1 sowie cos α1 − → e a = cos α2 und cos α3 − → → → a = |− a|·− ea 20/64 Vektoralgebra Anwendungen der Vektorrechnung Das Skalarprodukt → Das physikalische Experiment: Arbeit, die längs einer Strecke − s → − von der Kraft F geleistet wird. Nur der Anteil der Kraft längs des Weges ist relevant. → → − A = | F | · |− s | · cos ϕ − → F ϕ − → F · cos ϕ − → s 21/64 Vektoralgebra Anwendungen der Vektorrechnung Das Skalarprodukt → − → Definition: Unter dem Skalarprodukt der Vektoren − a und b versteht man das Produkt aus den Beträgen der beiden Vektoren → − → − a und b multipliziert mit dem Kosinus des eingeschlossenen Winkels. → − → − → − → a · b = |− a | · | b | · cos ϕ Daraus ergibt sich für den Winkel ϕ : → − − → a · b > 0 0 ≤ ϕ < π2 → − → − a · b < 0 π2 < ϕ ≤ π → − → − ϕ = π2 a · b = 0 22/64 Vektoralgebra Anwendungen der Vektorrechnung Eigenschaften des Skalarproduktes → − → → − − → a · b = b ·− a − → → − → − → → − → a ·(b + − c) = − a · b + → a ·− c → − → − → − → → → s · (− a · b ) = (s · − a)· b = − a · (s · b ) → → − → → − → − → a ·(b ·− c ) = (− a · b)·− c → − → − → − → − → → → → a · b = 0⇒− a =− o ∨ b =− o ∨− a ⊥ b 23/64 Vektoralgebra Anwendungen der Vektorrechnung Eigenschaften des Skalarproduktes Es gibt keine Umkehrung des Skalarproduktes, d.h. die Beziehung − → → a ·− x = b − lässt sich nicht nach → x auflösen. − → x − → a → → Alle − x besitzen dieselbe Projektion auf − a . Die Spitzen aller → → Vektoren mit − a ·− x = b liegen in einer Ebene. 24/64 Vektoralgebra Anwendungen der Vektorrechnung Skalarprodukt in Koordinatendarstellung → − → − → − → − → − → − → − − → a · b = (a1 i + a2 j + a3 k ) · (b1 i + b2 j + b3 k ) = a1 · b1 + a2 · b2 + a3 · b3 a1 b1 a2 · b2 = a1 · b1 + a2 · b2 + a3 · b3 a3 b3 Sind die Koordinaten zweier Vektoren bekannt, so kann mit Hilfe des Skalarprodukts der Winkel zwischen den beiden Vektoren bestimmt werden. → − → − → − → a · b = |− a | · | b | · cos ϕ ⇒ cos ϕ = = → − − → a · b → − → |− a|·|b| a1 b1 + a2 b 2 + a3 b3 2 2 2 a1 + a2 + a3 · b12 + b22 + b32 25/64 Vektoralgebra Anwendungen der Vektorrechnung Projektionen − → − Projektion des Vektors → a auf die Richtung von b : skalar: vektoriell: → → − − ba = a · b → − |b| → − → − − → − → ba = a · b · b →2 − |b| 26/64 Vektoralgebra Anwendungen der Vektorrechnung Vektorprodukt(Kreuzprodukt) Das physikalische Experiment: Bewegt sich eine elektrische Ladung im Magnetfeld, so wirkt auf diese eine Kraft. Diese Kraft wirkt senkrecht auf die Bewegungsrichtung und senkrecht auf die Richtung des Magnetfelds. Dabei ist nur der Anteil des Magnetfelds relevant, der senkrecht zur Bewegungsrichtung ist. Das Drehmoment in der Mechanik wird ebenfalls als Vektorprodukt definiert. − → B − → B · sin ϕ ϕ − → v 27/64 Vektoralgebra Anwendungen der Vektorrechnung Vektorprodukt(Kreuzprodukt) 28/64 Vektoralgebra Anwendungen der Vektorrechnung Vektorprodukt(Kreuzprodukt) → − → Definition: Das mit − a × b bezeichnete Vektorprodukt steht → − → senkrecht auf den Vektoren − a und b , bildet in der Reihenfolge → → − − → → − a , b ,− a × b ein Rechtssystem und hat den Betrag → − → − → − → → → |− a × b | = |− a | · | b | · | sin ϕ|, ϕ = ∠(− a, b) → − − → a × b − → b − → a 29/64 Vektoralgebra Anwendungen der Vektorrechnung Vektorprodukt(Kreuzprodukt) − → b ϕ → − | b | · sin ϕ − → a → − → − → → Der Betrag |− a × b | kann als die von den Vektoren − a , b aufgespannten Parallelogrammfläche gedeutet werden. 30/64 Vektoralgebra Anwendungen der Vektorrechnung Eigenschaften des Vektorproduktes → − → → − − → a × b = −b ×− a − → → − → − → → − → a ×(b + − c) = − a × b + → a ×− c → − → − → − → → → s · (− a × b ) = (s · − a)× b = − a × (s · b ) → → − → − → − → → a ×(b ×− c ) = (− a × b)×− c → − → − → − → − → → → → → a × b = − o ⇒− a =− o ∨ b =− o ∨− a b 31/64 Vektoralgebra Anwendungen der Vektorrechnung Eigenschaften des Vektorproduktes Es gibt keine Umkehrung des Vektorprodukts, d.h. die Beziehung → − − → → a ×− x = b − lässt sich nicht nach → x auflösen. − → x − → a → − → → Die Spitzen aller Vektoren mit − a ×− x = b liegen auf einer → − → Geraden parallel zu − a und senkrecht zu b . 32/64 Vektoralgebra Anwendungen der Vektorrechnung Vektorprodukt in Koordinatendarstellung → − → − → − → − → − → − → − − → a × b = (a1 i + a2 j + a3 k ) × (b1 i + b2 j + b3 k ). → − → − → − → − − → a × b = (a2 b3 − a3 b2 ) i + (a3 b1 − a1 b3 ) j + (a1 b2 − a2 b1 ) k . oder b1 a2 b3 − a3 b2 a1 a2 × b2 = a3 b1 − a1 b3 . a3 b3 a1 b2 − a2 b1 33/64 Vektoralgebra Anwendungen der Vektorrechnung Vektorprodukt in Koordinatendarstellung Merkregel mit Determinantenschema” : ” − → → − a × b = − − − → → → i j k a1 a2 a3 b1 b2 b3 − a2 a3 → = i · b2 b3 a2 b3 −a3 b2 − → − j · a1 a3 b1 b3 a1 b3 −a3 b1 − → + k · a1 a2 b1 b2 a1 b2 −a2 b1 34/64 Vektoralgebra Anwendungen der Vektorrechnung Spatprodukt → Definition: Wird ein Vektor − a mit dem Vektorpodukt von zwei → − − → Vektoren b × c skalar multipliziert, so nennt man diese Kombination Spatprodukt. − → → → → − → → Schreibweise: [ − a , b ,− c ] = − a ·(b ×− c) 35/64 Vektoralgebra Anwendungen der Vektorrechnung Spatprodukt Das Spatprodukt lässt sich als (orientiertes) Volumen des von den drei Vektoren aufgespannten Spats interpretieren. → → − → → − → → |− a ·(b ×− c )| = |− a|·|b ×− c | · | cos ϕ| − → → − mit ϕ = ∠(→ a, b ×− c) AP 36/64 Vektoralgebra Anwendungen der Vektorrechnung Spatprodukt − − → b ×→ c − → a h − → c Ap − → b 37/64 Vektoralgebra Anwendungen der Vektorrechnung Spatprodukt in Koordinatendarstellung a1 b2 c3 − b3 c2 → → − → − a ·(b ×− c ) = a2 · b3 c1 − b1 c3 a3 b1 c2 − b2 c1 = a1 (b2 c3 − b3 c2 ) + a2 (b3 c1 − b1 c3 ) + a3 (b1 c2 − b2 c1 ) ⇒ a1 a2 a3 → − − → [− a , b ,→ c ] = b1 b2 b3 c1 c2 c3 38/64 Vektoralgebra Anwendungen der Vektorrechnung Eigenschaften des Spatprodukts → → − → Aus der Eigenschaft [ − a , b ,− c ] = 0 folgt, dass alle Vektoren in einer Ebene liegen. Wird beim Spatprodukt die Reihenfolge der Vektoren verändert, so kann sich höchstens das Vorzeichen ändern. Speziell gilt: Werden zwei Vektoren vertauscht (dritter Vektor bleibt auf seiner Position), so ändert sich das Vorzeichen. Bei zyklischer Vertauschung“ bleibt das Vorzeichen erhalten. ” 39/64 Vektoralgebra Anwendungen der Vektorrechnung Lineare Abhängigkeit − → − → − Zwei Vektoren → a, b = 0 nennt man linear abhängig, wenn sie parallel sind; d.h. wenn gilt: → − → b = λ− a linear unabhängig, wenn sie nicht parallel sind. → − → − a und b spannen dann (bei gleichem Anfangspunkt) eine Ebene auf. 40/64 Vektoralgebra Anwendungen der Vektorrechnung Lineare Abhängigkeit Drei Vektoren nennt man linear abhängig, wenn alle drei Vektoren in einer Ebene liegen → − → → Es gilt dann − c = λ− a +µb → → − → Kriterium: [ − a , b ,− c ] = 0 linear unabhängig, wenn sie (bei gleichem Anfangspunkt) den 3D-Raum aufspannen. → → − → Kriterium: [ − a , b ,− c ] = 0 41/64 Vektoralgebra Anwendungen der Vektorrechnung Zerlegung in zwei Komponenten → → − → Sind die Vektoren − a, b, − c linear abhängig, so kann der Vektor → − → − → c in Komponenten in die Richtungen von − a , b zerlegt werden. Das lineare Gleichungssystem: → − → − → a + λ2 · b c = λ1 · − besitzt dann eine eindeutige Lösung λ1 , λ2 . 42/64 Vektoralgebra Anwendungen der Vektorrechnung Zerlegung in zwei Komponenten Beispiel: 2 1 5 − → → − → a = 1 , b = 0 , − c =2 0 −2 −2 Das lineare Gleichungssystem: → − → − → a + λ2 · b c = λ1 · − besitzt die Lösung λ1 = 2, λ2 = 1. 43/64 Vektoralgebra Anwendungen der Vektorrechnung Zerlegung in drei Komponenten → → − → Sind die Vektoren − a, b, − c linear unabhängig, so kann jeder → → − → − → Vektor x in Komponenten in die Richtungen von − a, b, − c zerlegt werden. Das lineare Gleichungssystem: → − → → − → a + λ2 · b + λ3 · − c x = λ1 · − besitzt dann eine eindeutige Lösung λ1 , λ2 , λ3 . 44/64 Vektoralgebra Anwendungen der Vektorrechnung Zerlegung in drei Komponenten Beispiel: 2 1 1 1 − → → − − − a = 1 , b = 0 , → c = −1 , → x = 0 0 −2 1 5 Das lineare Gleichungssystem: → − → → − → a + λ2 · b + λ3 · − c x = λ1 · − besitzt die Lösung λ1 = 1, λ2 = −2, λ3 = 1. 45/64 Vektoralgebra Anwendungen der Vektorrechnung Gerade in Parameterdarstellung − → u g − → x0 − → x x x1 3 x2 46/64 Vektoralgebra Anwendungen der Vektorrechnung Gerade in Parameterdarstellung Gerade in Parameterdarstellung (Punkt-Richtungsform) g : − → → → x = − x 0 + t ·− u , t ∈ IR Beispiel: Gerade durch die Punkte A(1|2|3), B(−1|0|2). 1 −1 2 −→ → − u = AB = 2 − 0 = 2 3 2 1 1 2 1 + 2t x1 → − x = x2 = 2 + t · 2 = 2 + 2t x3 3 1 3+t 47/64 Vektoralgebra Anwendungen der Vektorrechnung Ebene in Parameterdarstellung x3 x x 2 1 48/64 Vektoralgebra Anwendungen der Vektorrechnung Ebene in Parameterdarstellung Ebene in Parameterdarstellung − → → → → E : x = − x 0 + λ− u + µ− v λ, µ ∈ IR Beispiel : Ebene durch A(1| − 1|1), B(2|1|4),C (2| − 3| − 1). 1 − → → − x 0 = OA = −1 1 2 1 1 − → → − u = AB = 1 − −1 = 2 4 1 3 2 1 1 −→ → − v = AC = −3 − −1 = −2 −1 1 −2 49/64 Vektoralgebra Anwendungen der Vektorrechnung Ebene in Parameterdarstellung Ergebnis x1 1 1 1 1+λ+µ − → x = x2 = −1 + λ2 + µ−2 = −1 + 2λ − 2µ x3 1 3 −2 1 + 3λ − 2µ 50/64 Vektoralgebra Anwendungen der Vektorrechnung Ebene in Gleichungsform − → n − → n → − v E − → u − → x − → x0 51/64 Vektoralgebra Anwendungen der Vektorrechnung Ebene in Gleichungsform Eine Ebene lässt sich auch durch eine lineare Gleichung in x1 , x2 , x3 beschreiben. Dazu multiplizieren wir die Parameterdarstellung → → → scalar mit dem Normalenvektor der Ebene − n =− u ×− v → → − → → u + µ− v x = − x 0 + λ− → → → → → − → → − n + λ− u ·− n + µ− v ·− n x ·− n = → x 0·− → − → → − n x ·− n = → x 0·− 52/64 Vektoralgebra Anwendungen der Vektorrechnung Ebene in Gleichungsform Beispiel 1 1 − → x = −1 + λ 2 1 3 − → e1 → − → → n = − u ×− v = 1 1 + − → e2 2 −2 1 µ−2 −2 → − 2 e 3 3 = 5 −2 −4 53/64 Vektoralgebra Anwendungen der Vektorrechnung Ebene in Gleichungsform Beispiel → − → → − n x ·− n = → x 0·− 2 1 2 x1 ⇐⇒ 5 · x2 = 5 · −1 x3 −4 1 −4 2x1 + 5x2 − 4x3 = + − 7 54/64 Vektoralgebra Anwendungen der Vektorrechnung Schnitt Gerade-Ebene Die Parameterdarstellung der Geraden eingesetzt in die Ebenengleichung ergibt eine lineare Gleichung für den Schnittparameter t . Ist die Ebene ebenfalls in Parameterform gegeben, so bestimmt man zunächst die Ebenengleichung und verfährt weiter nach obigem Schema. 55/64 Vektoralgebra Anwendungen der Vektorrechnung Schnitt Gerade-Ebene Beispiel g : E : 1 1 − → x = 0 + λ 1 1 −2 x1 + 2x2 + x3 = 3 ⇐⇒ x1 = 1 + λ x2 = λ x3 = 1 − 2λ 56/64 Vektoralgebra Anwendungen der Vektorrechnung Schnitt Gerade-Ebene =⇒ =⇒ (1 + λ)+2λ +(1 −2λ) =3 =⇒ 1 1 2 → − s = 0 + 1 = 1 1 −2 −1 λ = 1 57/64 Vektoralgebra Anwendungen der Vektorrechnung Schnitt Ebene-Ebene Die Ebenen E1 , E2 seien durch ihre Koordinatengleichung gegeben. Die Lösung dieses linearen Gleichungssystems ergibt eine einparametrige Lösung, d.h. die Parameterdarstellung der Schnittgeraden. 58/64 Vektoralgebra Anwendungen der Vektorrechnung Schnitt Ebene-Ebene Beispiel : E1 : x1 + 2x2 + x3 = 3 2x3 = 3 E2 : 4x1 − x2 + 1 2 1 3 1 2 1 3 ∼ 4 −1 2 3 0 −9 −2 −9 x1 = 1 − 5λ x2 = 1 − 2λ x3 = 9λ 1 −5 → − x = 1 + λ −2 0 9 ⇒ 59/64 Vektoralgebra Anwendungen der Vektorrechnung Schnitt Gerade-Gerade Zwei Geraden im Raum besitzen nur dann einen Schnittpunkt, wenn sie in einer Ebene liegen und nicht parallel sind. Das Gleichsetzen der beiden Parameterdarstellungen (mit unterschiedlichen Bezeichnungen für die Parameter) ergibt ein lineares Gleichungssystem für die beiden Parameter. 60/64 Vektoralgebra Anwendungen der Vektorrechnung Schnitt Gerade-Gerade Beispiel : g1 : x1 −2 −1 x2 = 3 + t1 · 3 x3 1 −1 g2 : x1 −8 5 x2 = −2 + t2 · 4 x3 2 −3 Ergebnis: S(1|0| − 2) 61/64 Vektoralgebra Anwendungen der Vektorrechnung Kurven in Parameterdarstellung Definition : x1 (t) −−→ Kurve x(t) = x2 (t) , t ∈ IR x3 (t) −−˙→ Tangentialvektor x(t) = −−→ d x(t) dt x˙1 (t) = x˙2 (t) , t ∈ IR x˙3 (t) 62/64 Vektoralgebra Anwendungen der Vektorrechnung Kurven in Parameterdarstellung Beispiele : r · cost , t ∈ [0, 2π] r · sint −−→ r · t − r · sint Zykloide x(t) = , t ∈ [0, 6π] r − r · cost cost −−→ Schraubenlinie x(t) = sint , t ∈ [0, 4π] t −−→ Kreis x(t) = 63/64 Vektoralgebra Anwendungen der Vektorrechnung VEKTORRECHNUNG Prof. Dr. Dan Eugen Ulmet Hochschule Esslingen März 2011 64/64