- Stuettler.org
Werbung

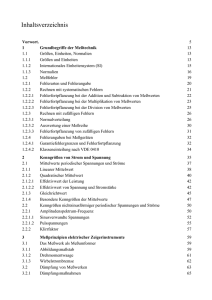
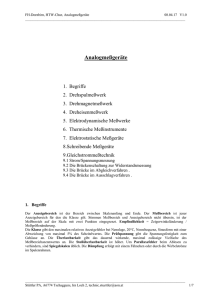
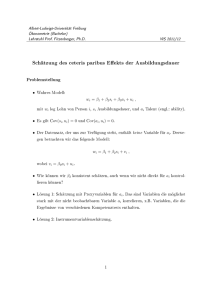
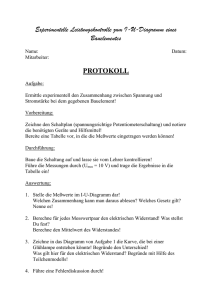
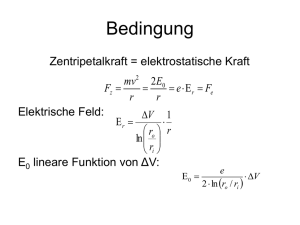
FH-Dornbirn, HTW-Chur, Statistik und Fehlerfortpflanzung V2.1 __________________________________________________________________________________________ Auswertung von Messergebnissen Statistik und Fehlerfortpflanzung 1. Weiterverarbeitung/Darstellung von Messergebnissen 2. Einführung in die Statistik 3. Fehlerfortpflanzung 4. Beispiel 5. Kombination von unterschiedlichen Fehlertypen Unsicherheitsberechnung nach GUM 6. Kurvenanpassung 1.Weiterverarbeitung von Messergebnissen Vorraussetzung für eine gute Weiterverarbeitbarkeit von Messergebnissen ist oft das Vorhandensein von modernen Messgeräten: a) eine PC-kompatible Hardware und Betriebsystem verwenden, sodaß eine Weiterverarbeitung direkt auf dem Messgerät durch eine PC-kompatible Anwendungssoftware erfolgen kann Häufig verwendete Anwendungssoftwaren und Entwicklungsysteme für die online Messsignalverarbeitung sind: Matlab-Simulink ( www.mathworks.de), LabView (www.ni.de), HPVEE,... Für die offline Messdatenverarbeitung werden Excel, Matlab, ... angewendet. b) Messkarten garantieren für den PC eine einfache Weiterverarbeitung auf dem PC c) Messgeräte mit Schnittstellen zur Gerätesteuerung und zum Auslesen der Messdaten vom PC aus: RS232, CAN, Interbus, HP-GPIB,.. Die Weiterverarbeitung beinhaltet: - das Auslösen von Alarmen - Auslösen von Schaltvorgängen, Steuerungen - Regelungen - Protokollierungen - Beurteilung der Ergebnisse mit den Methoden der Statistik - Analysen zur Berechnung nicht direkt messbarer Größen oder Parameter - Extrapolationen - Filterungen, Fehlerkorrekturen - Interpolation - Regression und Abgleich mit theoretischen Verläufen - Mustererkennungen - Transformationen und Analysen im Bildbereich - Darstellung grafisch, in Tabellen, mit Visualisierungen - verbale Beurteilung und Kommentierung __________________________________________________________________________________________ Stüttler PA, A6774 Tschagguns, Im Loch 2, [email protected] 1/11 FH-Dornbirn, HTW-Chur, Statistik und Fehlerfortpflanzung V2.1 __________________________________________________________________________________________ Beispiel zur tabellarischen und grafischen Darstellung von Meßergebnissen anhand eines Beispiels a)Messschaltung Datum: Messung: Sign: Norma 6n, Nr.1235 A UDC HP,DC1500 Nr 4411 BlattNr.: V Fluke2000, Nr.4321 1N4148 b)Meßtabelle U Igem Itheor =1e-9*(e (U/(1,5*0,025))-1) V A A 0 0 0 0,1 0 1,34E-08 0,2 0 2,06E-07 0,3 2,50E-06 2,98E-06 0,4 4,10E-05 4,29E-05 0,5 6,50E-04 0,000617 0,53 1,80E-03 0,001374 0,56 3,00E-03 0,003058 0,59 7,00E-03 0,006806 0,62 1,90E-02 0,015147 0,65 3,00E-02 0,033711 0,68 8,00E-02 0,075025 0,71 1,90E-01 0,166971 0,74 3,50E-01 0,371602 0,77 8,00E-01 0,827015 0,8 1,85E+00 1,840556 0,83 4,10E+00 4,096232 c) Diag:Diodenkennlinie c)1. gem/theor c)2. gezoomt (mit unterdrücktem Nullpunkt ) d)Interpretation und Diskussion des Meßergebnisses: Vergleich der Messdaten mit der Theorie, Erklärungen für Abweichungen, Angabe der Meßfehler/Meßunsicherheit, Schlußfolgerungen... __________________________________________________________________________________________ Stüttler PA, A6774 Tschagguns, Im Loch 2, [email protected] 2/11 FH-Dornbirn, HTW-Chur, Statistik und Fehlerfortpflanzung V2.1 __________________________________________________________________________________________ 2. Einführung in die Statistik Meßwerte yi einer Meßreihe unterliegen einer Reihe von zufälligen Einflußgrößen ( Einstreuungen, Ablesefehler, Reibung, Speisespannungsschwankungen,.. ). Wir unterscheiden grundsätzlich zwei Fälle: a) Messwerte gewonnen aus einer Vielzahl von Vermessungen desselben Objektes: die Messwerte schwanken aufgrund der Schwankung /Unsicherheit des Meßprozesses b) Messwerte gewonnen aus der ( eventuell genau angenommenen) Messung vieler ähnlicher (aber mit schwankender Abmessung) Objekte ( z.B. Serienproduktion : der Füllgrad von Dosen schwankt von Dose zu Dose, Beurteilung des Produktionsprozesses). Darüber hinaus können auch Fehlergrenzen, bekannte Meßunsicherheiten von Normalen, Messgeräten, Hilfsmitteln und Störeffekten berücksichtigt werden ( siehe GUM ). Statistische Aussagen über den Mittelwert, die Qualität des Mittelwertes usw. werden angebracht sein. Mit dem y 1 n yi n 1 Mittelwert erhält man eine Näherung für den wahren Wert 1 1 n yi n 1 Die Bildung des Mittelwertes ist die einfachste denkbare und naheliegende Verbesserung des Messergebnisses. Allerdings ist die Qualität des Mittelwertes damit noch nicht bestimmt. Die meisten Meßwerte einer Messreihe zum selben Meßpunkt werden nahe dem wahren Werte liegen, viele etwas weiter entfernt, einige noch weiter entfernt und sehr wenige werden sehr weit vom wahren Wert entfernt liegen. Die Verteilung statistisch streuender Meßwerte folgt oft einer Gauß'schen Glockenkurve2. Die Qualität der Messwerte und des gebildeten Mittelwertes wird in der Breite der Streuung um den wahren Wert, also der Breite der Gauß'schen Glockenkurve ersichtlich. Die Wahrscheinlichkeits-Dichteverteilung der Meßwerte w(y) folgt dann ( im Falle der Gaußverteilung ) folgendem Zusammenhang : w(μ) 2 w( y ) mit y w( y ) 1 2 ( y ) 2 2 e P(μ+/-σ)=0.68 n 1 1 ( yi ) 2 n n lim w(μ) Meßwert Wahrschein lichkeitsdichteverteilung Sdandardabeichnung wahrerWert μ-2σ μ-σ μ μ+σ μ+2σ a) Erwartete Lage eines Meßwertes Für Meßwerte, die einer Gauß'schen Glockenkurve gemäß verteilt sind gilt, sie liegen mit einer Wahrscheinlichkeit P( y ) w( y)dy 0.683 (68%) innerhalb des Intervalls - bis -! Für andere Intervallbreiten gilt : P( / 2 ) 0.95 (95%) P( / 2.58 ) 0.99 (99%) b) Erwartete Lage des Mittelwertes Der Bereich indem einzelne Messwerte mit einer gegebenen Wahrscheinlichkeit liegen ist groß ( +/-1σ für 68% Wahrscheinlichkeit, ..). Der Mittelwert besitzt freilich bessere Qualität als der einzelne Messwert und er wird näher beim wahren Wert liegen. Die Qualität des Mittelwertes steigt klarerweise mit der Anzahl der Messwerte, rückt also mit zunehmender Anzahl von Messwerten näher an den wahren Wert heran. Das Gebiet in dem der Mittelwert mit einer bestimmten Wahrscheinlichkeit liegt wird also mit zunehmender Anzahl von Messwerten kleiner. Der Bereich / n kennzeichnet ein mit zunehmender Messwerteanzahl n kleiner werdendes Gebiet Auf den Begriff des ‚wahren Wertes’ wird nach GUM weitestgehend verzichtet, hier soll er dennoch… Nach GUM (guide uncertainity measurement) sind andere Verteilungen einfach zu berücksichtigen __________________________________________________________________________________________ Stüttler PA, A6774 Tschagguns, Im Loch 2, [email protected] 3/11 1 2 FH-Dornbirn, HTW-Chur, Statistik und Fehlerfortpflanzung V2.1 __________________________________________________________________________________________ um den wahren Wert in dem der aus n Meßwerten gewonnenen angenäherten Mittelwert yi, mit einer 2 ; .. ) . n c) Erwartete Lage des wahren Wertes ( wahren, exakten Mittelwertes ) Weil der Abstand vom wahren Wert zum Mittelwert hin gleich groß ist wie umgekehrt der Abstand vom Mittelwert zum wahren Wert hin, können wir die Lage des wahren Wertes ausgehend von der bekannten Position des Mittelwertes angeben. Diese umgekehrte Argumentation ist für die Praxis wesentlich wertvoller als b), weil sie ausgehend von einem bestimmbaren Wert ( dem Mittelwert ) Aussagen über einen prinzipiell nicht berechenbaren Wert ( den wahren Wert ) erlaubt. Der Bereich um den Mittelwert y / wird als Vertrauensgrenze bezeichnet und kennzeichnet ein Gebiet n Wahrscheinlichkeit von 68% liegt (Wahrscheinlichkeit 95% für um den aus n Meßwerten gewonnenen angenäherten Mittelwert / yi , in dem der wahre Wert mit einer Wahrscheinlichkeit von 68% liegt (Wahrscheinlichkeit 95% für y / 2 ; .. ) . n Theoretisch könnten nun wertvolle Aussagen zur Lage des wahren Wertes gemacht werden. Allerdings stellt sich das Problem, dass die Standardabweichung praktisch nicht berechnet werden kann, weil sie zu Ihrer exakten Berechnung unendlich viele Messwerte und der wahre Wert nötig wären! Praktische Anwendung : Streuung, Vertrauensfaktor, Vertrauensbereich Weil allerdings der wahre Wert nicht bekannt ist und die Formel für die Standardabweichung unendlich viele Messwerte verlangt ist die Bestimmung der Standardabweichung nicht möglich. Deshalb wird in Anlehnung an die Standardabweichung aber unter Verwendung des berechenbaren y i und nur einer endlichen Zahl von Messwerten in Anlehnung an die Standardabweichung die berechenbare Streuung definiert : s 1 n ( yi y ) 2 n 1 1 Für n >> geht die stärker fehlerbehaftete Streuung in die Standardabweichung über. In Anlehnung an die Vertrauensgrenzen wird der Vertrauensbereich eingeführt. Dazu wird die im Vergleich zur Standardabweichung geringere Qualität der Streuung mit dem tabellierten Vertrauensfaktor t ( DIN 1319, Studentverteilung ) berücksichtigt. Der Vertrauensbereich ist also gegenüber den Vertrauensgrenzen aufgrund der schlechteren Qualität der Streuung gegenüber der Standardabweichung aufgeweitet. Die Aufweitung nimmt für eine zunehmende Anzahl von Messwerten ab( die Streuung geht über in die Standardabweichung ). Im Vertrauensbereich y / Auszug aus DIN 1319 P = 68% +/-1 n t 3 1.32 4 1.2 10 1.06 100 1.00 ->1 für n (+/-1σ) t 68 * s liegt der wahre Wert mit einer Wahrscheinlichkeit von 68%. n P=95% +/-2 t 4.3 3.2 2.3 2.0 P=99% +/-2.58 t 9.9 5.8 3.2 2.6 ->2.0 für n (+/-2σ) 2.58-> für n (+/-2.58σ) Damit ist es nun möglich für jeden Mittelwert einer Meßgröße eine präzise Angabe über seine statistische Sicherheit zu geben : t 99 * s ). mit einer Wahrscheinlichkeit von 99% liegt der wahre Wert innerhalb y / ( n __________________________________________________________________________________________ Stüttler PA, A6774 Tschagguns, Im Loch 2, [email protected] 4/11 FH-Dornbirn, HTW-Chur, Statistik und Fehlerfortpflanzung V2.1 __________________________________________________________________________________________ Beispiel : Eine Spannung wird 10 mal gemessen. Bestimme den 95% Vertrauensbereich : y[V] i y 6.6 6.4 6.3 6.5 6.6 6.7 6.4 6.7 6.3 6.5 1 2 3 4 5 6 7 8 9 10 1 n 65 yi 6.5V n 1 10 1 n 0.2 ( yi y ) 2 0.15V n 1 1 10 1 s n = 10; p = 95% t95 = 2.3 t 95 * s y / n 6.5 / 2.3 * 0.15 10 6.5V / 0.108V D.h. mit 95% Wahrscheinlichkeit liegt der wahre Wert innerhalb 6.5+/-0.108V. 3. Fehlerfortpflanzung Eingangskanäle Zielergebnis y1: y1,i Y=f(Yj) =f(yj,i) yj: yj,i Y,σ, .. Das Zielergebnis ist eine Funktion mehrerer fehlerbehafteter Eingangsgrößen. Beispiel: Es werde zur Bestimmung des Wertes eines Widerstandes in stromrichtiger Schaltung eine Meßreihe für den Strom und eine Messreihe für die Spannung aufgenommen. Die Messung ist einerseits mit systematischen Fehlern ( stromrichtige Methode = spannungsfalsch ) als auch mit statistischen Meßfehlern ( Reibung, Ablesefehler,.. ) behaftet. Der systematische Fehler der spannungsfalschen Spannungsmessung kann und soll unmittelbar behoben werden. Mit der Fehlerfortpflanzungsrechnung für systematische Fehler kann aber auch der Einfluß der systematische Fehler auf die Zielgröße ( Mittelwert des Widerstandswertes ) bestimmt werden. Die statistische Sicherheit ( Streuung ) der Strom- und der Spannungsmessung kann berechnet werden. Mit der Fehlerfortpflanzungsrechnung für statistische Fehler kann dann der statistische Fehler der bestimmt werden. Allerdings muss dazu für jeden Eingangskanal j eine Messreihe yj bestehend aus den Messwerten yj,i aufgenommen werden. Schließlich dient die Fehlerfortpflanzungsrechnung für Fehlergrenzen der Bestimmung von Fehlergrenzen der Zielgröße für Fehler unbestimmten Vorzeichens ( z.B. Fehlerangaben der Meßgeräte ). Fehlerfortpflanzung bei systematischen Fehlern Y f (y j ) y j ..Messreihe für die Meßgröße j dY j f yj dy j yj __________________________________________________________________________________________ Stüttler PA, A6774 Tschagguns, Im Loch 2, [email protected] 5/11 FH-Dornbirn, HTW-Chur, Statistik und Fehlerfortpflanzung V2.1 __________________________________________________________________________________________ Fehlerfortpflanzung statistischer Fehler ( der Streuung ) a) die Messkanäle sollen völlig unabhängig voneinander sein n f ( y sY 1 s j )2 yj j b) die Messkanäle k und j sollen abhängig voneinander3 sein (sind korreliert) Beispiel eine schwankende Spannungsquelle versorgt den über Strom- und Spannungsmessung auszumessenden Messwiderstand. sY n f ( y 1 n 1 n j yj s j ) 2 2 j 1 k 2 f yj yj f yk cov( y k , y j ) yj mit cov( y k , y j ) n 1 ( y j ,i y j )( y k ,i y k ) (n 1) i 1 Fehlerfortpflanzung bei Fehlern unbestimmten Vorzeichens ( z.B. Meßgeräteanzeigefehler ) dY j f yj dy j yj 4. Beispiel Widerstandsmessung Vorgehensweise: 1. Aufnahme einer Meßreihe 2. Eliminierung von systematischen Fehlern mittels Korrekturkurven oder Korrekturrechnung 3. Berechnung der Mittelwerte und der Streuungen der Meßgrößen 4. Anwendung von Rechen- und Funktionsvorschriften zur Bildung des Mittelwertes des Zielergebnisses 5. Berechnung des statistischen Fehlers des Zielergebnisses mittels der Fehlerfortpflanzungsgesetze 1. Aufnahme einer Messreihe zum selben Widerstand R A V Die Streuung der der versorgenden Spannungsquelle sei vernachlässigbar, so dass die Messwerte von Strom und Spannung unkorreliert seien. Diese Behauptung wird nachfolgend durch Berechnung der Kovarianz überprüft. Die Fehlerklassen der Meßgeräte seien : Amperemeter Ri,A = 0.1 Ohm, Meßgerätefehler 2%, Meßbereich 5A Voltmeter Ri,V =100kOhm, Meßgerätefehler 2%, Meßbereich 10V Meßwerte : I[A] 1.1 1.0 0.9 1.1 1.0 1.1 0.9 1.2 0.9 1.1 U[V] 6.6 6.4 6.3 6.5 6.6 6.7 6.4 6.7 6.3 6.5 i 1 2 3 4 5 6 7 8 9 10 Die Messung ergibt Werte ( Meßwerte, Meßreihe für U, I ), die im 2. Schritt um die systematischen Fehler bereinigt werden müssen : Die Kovarianz ‚cov’ zwischen allen korrelierten Messkanälen ist zu berechnen. Der Wert der Kovarianz ist ein Maß für die Korreliertheit, sodaß diese anhand des Wertes der Kovarianz überprüft werden kann. cov->0 bedeutet die Kanäle sind unkorreliert. __________________________________________________________________________________________ Stüttler PA, A6774 Tschagguns, Im Loch 2, [email protected] 6/11 3 FH-Dornbirn, HTW-Chur, Statistik und Fehlerfortpflanzung V2.1 __________________________________________________________________________________________ 2. Bereinigung um die systematischen Fehler Die Spannungsmessung ist bei der stromrichtigen Methode verfälscht und korrigierbar : Ukorr = U-I*Ri,A für die ganze Meßreihe durchzuführen. i I[A] U[V] Ukorr[V] 1 1.1 6.6 6.49 2 1.0 6.4 6.3 3 0.9 6.3 6.21 4 1.1 6.5 6.39 5 1.0 6.6 6.5 6 1.1 6.7 6.59 7 0.9 6.4 6.31 8 1.2 6.7 6.58 9 0.9 6.3 6.21 10 1.1 6.5 6.39 Falls der Einfluß der systematischen Fehler auf die Zielgröße interessiert, kann dies mit der Fehlerfortpflanzung für systematische Fehler mit dem Formalismus dY j dY j dR f yj R U dU f yj untersucht werden : dy j yj dy j : yj R I dI yj 1 U Ri I 2 dI I I Ri yj Wenn außerdem die Eingangsspannung nicht absolut konstant ist, entsteht durch ihre Schwankung eine weiterer systematischer Fehler der die Streuung von Strom und Spannung und die Streuung des Zielergebnisses verschlechtert. Deshalb soll dieser systematische Fehler behoben werden. 3. Mittelwerte und Streuung der U- und I-Meßreihen U sU 1 n U i 6.397V ; n 1 1 n (U i U ) 2 0.1402V n 1 1 I 1 n I i 1.03 A n 1 sI 1 n ( I i I ) 2 0.1059 A n 1 1 Überprüfung der Korreliertheit der beiden Messkanäle cov(U , I ) n 1 (U i U )( I i I ) 0.00122V (n 1) 1 cov(U , I ) 0,0349 die Korreliertheit der beiden Kanäle ist kaum vernachlässigbar! ( vergleiche cov0.5 mit su, si, bzw cov mit su*si,) 4. Berechnung des Mittelwertes des Zielergebnisses R U 6.397 6.2106Ohm I 1.03 __________________________________________________________________________________________ Stüttler PA, A6774 Tschagguns, Im Loch 2, [email protected] 7/11 FH-Dornbirn, HTW-Chur, Statistik und Fehlerfortpflanzung V2.1 __________________________________________________________________________________________ 5. Berechnung der statistischen Sicherheit des Zielergebnisses mittels Fehlerfortpflanzung Der Statistische Fehler des Zielergebnisses R : sY f n ( y 1 s j )2 yj j R U R I 1 U 1 6.397 sI ) 2 ( sU ) 2 ( 2 sI ) 2 ( 0.14) 2 ( 0.1059) 2 0.653 I I 1.03 1.032 Berücksichtigen wir die Korreliertheit der beiden Messkanäle: sR ( sY f n ( y 1 sR ( ( sU ) 2 ( R R n 1 n yj j R U s j ) 2 2 j 1 k 2 sU ) 2 ( R R I f yj yj sI ) 2 2 R f yk cov( yk , y j ) yj R R 1 U 1 U cov(U , I ) ( sU ) 2 ( 2 sI ) 2 ( 2 ) cov(U , I ) U I R I I I I 1 6.397 1 6.397 0.14) 2 ( 0.1059) 2 2 ( )0.00122 0.642 2 1.03 1.03 1.03 1.032 Der Unterschied ist kaum vernachlässigbar. Die beiden Messkanäle weisen korrelierte Messwerte auf! Mit der Anzahl der Meßwerte ( Länge der Meßreihe ) n und DIN1319 t=2.3. t9 5*s ) Mit einer Wahrscheinlichkeit von 95% liegt der wahre Wert innerhalb y / .( n t * s s 0.642 t95 R 2.3 * 0.467 R / ( 95 ) 6.2107 / 0.467Ohm n 10 n Mit einer Wahrscheinlichkeit von 95% liegt der Widerstand innerhalb 6.2107+/- 0.467 Ohm. Falls es von Interesse ist, können die Fehlergrenzen für R aufgrund der Fehlergrenzen der Messgeräte wie folgt bestimmt werden : Amperemeter Voltmeter dY j dR f yj R U 2% von 5 A = 0.1A 2% von 10V = 0.2V Fehlergrenzen des Zielergebnisses =? dy j yj dU R I dI yj 1 dU I U dI I2 yj 1 dU I R dI I 1 6.2107 0.2 0.1 0.79 1.03 1.03 Die Grenzen des Widerstandsfehlers aufgrund der Meßgeräte - Fehlergrenzen : 6.2107+/- 0.79 Ohm __________________________________________________________________________________________ Stüttler PA, A6774 Tschagguns, Im Loch 2, [email protected] 8/11 FH-Dornbirn, HTW-Chur, Statistik und Fehlerfortpflanzung V2.1 __________________________________________________________________________________________ 5. Kombination von unterschiedlichen Fehlertypen Serienschaltung zweier Widerstände – Meßunsicherheit nach GUM4 Es soll ein Widerstand von 100,22 Ohm erstellt werden. Zur Verfügung stehen ein Widerstandsnormal und eine Widerstandsdekade, die in 0.1Ohm Schritten verstellt werden kann. yj RNorm RDec RKonInt RKonExt Modellgleichung, Prozeßgleichung R=RNorm+RDec+RKonInt+2*RKonExt R RNorm RDec RKonInt RKonExt f .. Zielgröße, Ausgangsgröße .. Normalwiderstand .. Widerstand der Dekade .. Übergangswiderstand zwischen den Widerständen .. Übergangwiderstand R= RNorm+ RDec+RKonInt +2*RKonExt Y R .. 4 Eingangskanäle Referenzwiderstand: RNorm=99,92Ohm, mit einer erweiterten Messunsicherheit5 Uk=2;95%=10mOhm laut Kalibrierschein => sNorm=5mOhmn=50 ( wird angenommen, wenn aus dem Kalibrierschein nicht ersichtlich)6 Widerstandsdekade Um den Wert 100,22 gut erreichen zu können werden, wird ein Wert von 300mOhm eingestellt . Der Hersteller gibt eine maximale Meßunsicherheit (Fehlergrenzen, MPE- Maximum permissible error, Rechteckverteilung!) von +-20mOhm an.7 => RDec =0,3 sDec=20mOhm/√3 n=∞ Interne Verbindung Der Widerstandwert wurde durch empirische Untersuchungen ermittelt: I RKonInt/mOhm 1 8,5 2 12,5 3 7,3 4 6,3 5 7,4 =>RKonInt =8,4mOhm, sei normalverteilt sKonInt=4mOhm 6 7,7 7 8,8 n= 7 Externe Verbindung Die Widerstandskombination hat zwei externe Anschlüsse . Der Widerstand sei 0Ohm mit einer Maximalfehler von 2.5mOhm (rechteckverteilt) => RKonExt =0mOhm, sei rechteckverteilt sKonExt=2,5mOhm/√3 4 n=∞ (ISO-Guide of expression of Uncertainty of Measurement) darin werden die Grundlagen DIN1319 zunehmend ersetzt durch GUM und in Deutschland/Österreich/Europa DIN ENV13005 Beispiel aus/nach Pesch ‚Bestimmung der Meßunsicherheit nach GUM’, www.messunsicherheit.com Beachten Sie: statt Fehler finden die Begriffe Meßabweichung, statt Mittelwert der Schätzwert Verwendung,.. ; der wahre Wert wird als Begriff eher gemieden 5 Statt 95%Vertrauensbereich o.ä.wird gerne verwendet: Unsicherheit U95% oder Uk=2 , wobei k der Erweiterungsfaktor für 95% (k=2) und 99,5% (k=2,58) darstellt; überhöhte Erweiterungsfaktoren t, gemäß Tabelle Seite 4 sind bei kleiner Anzahl von Messwerten einzusetzen 6 Nach GUM wird eigentlich die bessere Größe Freiheitsgrad eingesetzt ( siehe Pesch..) 7 Für Rechteckverteilungen gilt: σ=s=Fehlergrenze/√3, n=∞ für Dreiecksverteilungen gilt: σ=s=Fehlergrenze/√6, n=∞ für U-Verteilungen gilt: σ=s=Fehlergrenze/√2, n=∞ __________________________________________________________________________________________ Stüttler PA, A6774 Tschagguns, Im Loch 2, [email protected] 9/11 FH-Dornbirn, HTW-Chur, Statistik und Fehlerfortpflanzung V2.1 __________________________________________________________________________________________ Zielergebnis R=RNorm+RDec+RKonInt+2*RKonExt=100,22 2 Y s R j 1 s y j j 4 2 2 2 R R R R s RNorm s RDec s RKonInt s RKonExt RNorm RDec RKonInt RKonExt 1 * s RNorm 2 1 * s RDec 2 1 * s RKonInt 2 2 * s RKonExt 2 1 * 5mOhm 2 1 * 20mOhm 2 2 2 2,5mOhm 2 1 * 4mOhm 2 * 13,5mOhm 3 3 Tabellarisches Meßunsicherheitsbudget normal rechteckig normal rechteckig 0.005 0.02/√3 0.004 0.0025/√3 R68% R95%,k=2 100,22 100,22 Unsicherheitsbeitrag 99,92 0,3 0,0084 0 7 n-1 RNorm RDec RKonInt RKonExt 6 Sensitivitätskoeffizient ∂Y/∂yj 5 sj 4 Verteilung 3 Schätzwert 2 Eingangskanal Einflußgröße 1 1 1 1 2 50 ∞ 6 ∞ 0,005 0.0116 0.004 0.003 sR Uk=2 0.0135 0.027 Abschätzung der (fiktiven) Anzahl von Messungen des Zielergebnisses8 zur Bestimmung von t: n 4 j 1 Y s4 x j s j 4 nj 1 0.014 4 (1 * 0,005) 4 (1 * 0,020 / 3 ) 4 (1 * 0,004) 4 (2 * 0,0025 / 3 ) 4 50 6 900 Für einen Freiheitsgrad n=900 > 50 reicht die Erweiterungsfaktor 2 zur Erreichung einer 95% Wahrscheinlichkeit (siehe Tabelle Seite4, ansonsten sind die Studentfaktoren t zur Erweiterung aus der Tabelle zu entnehmen. Messergebnis 8 R=100,22Ohm +-27mOhm incl. einer mit 2 erweiterten Meßunsicherheit (95%) eigentlich: Freiheitsgrad des Zielergebnisses, siehe GUM/Pesch __________________________________________________________________________________________ Stüttler PA, A6774 Tschagguns, Im Loch 2, [email protected] 10/11 FH-Dornbirn, HTW-Chur, Statistik und Fehlerfortpflanzung V2.1 __________________________________________________________________________________________ 6. Kurvenanpassung Es soll die Funktion f(a,b,c,..) durch optimale Anpassung der Parameter a,b,c.. an eine gegebene Messreihe angepasst werden. Beispiel: Die Diodenkennlinie folgt theoretisch Id=Is(eU/m0.025-1). Die Parameter Is und m sind so einzustellen, dass der theoretische Verlauf optimal in eine gegebene Messreihe (Ud, Id) passt. Dazu wird ein Gütekriterium ( meist die Summe der Fehlerquadrate) optimiert. Dies kann auf analytischem Wege (siehe unten) oder mit geeigneten Programmen numerisch erfolgen (z.B. Excel, siehe entsprechendes File auf dem LMS). a)Lineare Regression Die lineare Regression legt ein Gerade so durch die Vielzahl der Wertetuppel (xi,yi), daß die Summe der Abstandsquadrate der einzelnen Meßpunkte zur Geradenkennlinie y = ax + b ein Minimum wird. Die lineare Regression liefert dabei eindeutig die optimalen Koeffizienten a und b : y ax b f (a, b) (axi b y i ) 2 Min df (a, b) 2 (axi b y i ) xi 2(a xi2 b xi yi xi ) 0 da df (a, b) 2 (axi b y i ) 2(a xi b yi ) 0 Matrixschreibweise : db xi2 xi a xi2 xi a y i xi 1 b y i b xi 1 xi y i xi 1 yi b) quadratische Regression y ax 2 bx c f (a, b, c) (axi2 bxi c y i ) 2 Min df (a, b, c) 2 3 2 2 2 (axi2 bxi c y i ) xi 2(a xi4 b xi c xi y i xi ) 0 da df (a, b, c) 2 1 1 2 (axi2 bxi c y i ) xi 2(a xi3 b xi c xi y i xi ) 0 db df (a, b, c) 1 0 0 2 (axi2 bxi c y i ) 2(a xi2 b xi c xi y i xi ) 0 Matrixschreibweise : dc xi4 3 xi x 2 i xi3 xi2 xi1 2 4 xi2 a y i xi a xi xi1 b y i xi b xi3 c xi2 xi0 c y i xi3 xi2 xi1 xi2 xi1 xi0 1 y x 2 i i y i xi y i usw. Anmerkung: Für den Fall, dass der Funktionszusammenhang prinzipiell bekannt ist, ist es empfehlenswert diese Funktion auf der entsprechenden Achse im Diagramm abzutragen und dann mit linearer Regression zu arbeiten. Beispiel: Diodenkennlinie; es ist bekannt, dass es sich um eine e-Funktion handelt iD=K1*eu*K2, also wird auf der x-Achse nicht u sondern eu dargestellt. Die Diodenkennlinie wird dadurch zur Geraden. Die lin. Regression kann angewandt werden. Somit können die Konstanten K1 und K2 optimal gewonnen werden, sodass sich die theoretische e-Funktion optimal bezüglich der Gütefunktion ‚min. Fehlerquadrate’ in die Messwerte einpasst. __________________________________________________________________________________________ Stüttler PA, A6774 Tschagguns, Im Loch 2, [email protected] 11/11