Document
Werbung

2.4 Entscheidung bei Risiko
§ Entscheidung bei Risiko nimmt an, dass für jeden Zustand
Sj seine Eintrittswahrscheinlichkeit P(Sj) bekannt ist
§ Eintrittswahrscheinlichkeiten bestimmbar als
§ statistische Wahrscheinlichkeiten basierend auf
Erfahrungen aus der Vergangenheit (z.B. wie oft
hat es an diesem Tag in den letzten
100 Jahren geregnet)
§ subjektive Wahrscheinlichkeiten basierend auf
den Erwartungen des Entscheiders
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
54
Diskrete Zufallsvariable
§ Sei X eine diskrete Zufallsvariable mit möglichen Werten
{a1,…,an} und Wahrscheinlichkeiten P(X = ai),
§ Erwartungswert einer diskreten Zufallsvariable X ist
µ = E(X) =
n
ÿ
i=1
ai · P (X = ai )
§ Beispiel: Fairer Würfel mit sechs Seiten
1
1
1
E(X) = 1 · + 2 · + . . . 6 · = 3.5
6
6
6
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
55
Diskrete Zufallsvariable
§ Varianz einer diskreten Zufallsvariable X ist
n
ÿ
‡ 2 = V (X) =
(ai ≠ µ)2 · P (X = ai )
i=1
und es gilt
V (X) = E(X ≠ E(X))2 = E(X 2 ) ≠ (E(X))2
§ Größe σ heißt Standardabweichung (auch: Streuung)
§ Beispiel: Fairer Würfel mit sechs Seiten
1
2 1
2 1
V (X) = (1 ≠ 3.5) · + (2 ≠ 3.5) · + . . . + (6 ≠ 3.5) · = 2.916
6
6
6
2
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
56
Dominanz bei Unsicherheit
§ Konzept der Dominanz lässt sich auf den Fall
mehrerer Zustände erweitern
§ absolute Dominanz betrachtet nur das schlechtmöglichste
und bestmöglichste Ergebnis je Alternative
§ Zustandsdominanz vergleich die Ergebnisse
der Alternativen zustandsweise
§ stochastische Dominanz (erster Ordnung) betrachtet
auch die Wahrscheinlichkeiten der Zustände
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
57
Absolute Dominanz
§ Alternative Ai dominiert Alternative Aj im Sinne
absoluter Dominanz, wenn gilt
min(xik ) Ø max(xjk )
k
k
d.h. das schlechteste Ergebnis von Ai ist mindestens
so gut wie das beste Ergebnis von Aj
§ Beispiel:
A1
A2
S1
S2
S3
S4
0.20
0.50
0.20
0.10
40
20
20
20
30
5
50
10
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
A1 dominiert A2
58
Zustandsdominanz
§ Alternative Ai dominiert Alternative Aj im Sinne der
Zustandsdominanz, wenn gilt
’k : xik Ø xjk : · ÷ k : xik > xjk
d.h. Ai ist in allen Zuständen mindestens so gut wie Aj
und in mindestens einem besser
§ Beispiel:
A1
A2
S1
S2
S3
S4
0.20
0.50
0.20
0.10
40
40
20
25
10
10
20
40
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
A2 dominiert A1
59
Stochastische Dominanz
§ Stochastische Dominanz beruht auf Vergleich der
Wahrscheinlichkeitsverteilungen der Alternativen
§ Betrachte Alternative Ai als Zufallsvariable, dann sei
P (Ai Æ xi )
die Wahrscheinlichkeit, dass Ai zu einen Ergebnis
kleiner gleich xi führt
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
60
Stochastische Dominanz
§ Beispiel:
A1
A2
S1
S2
S3
S4
0.10
0.50
0.20
0.20
10
10
20
50
50
100
100
20
P (Ai Æ 10)
A1
A2
0.10
0.10
P (Ai Æ 20)
0.60
0.30
P (Ai Æ 50)
0.80
0.80
P (Ai Æ 100)
1.00
1.00
A1
A2
10
20
50
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
100
61
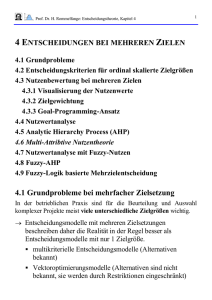
Stochastische Dominanz
§ Stochastische Dominanz (erster Ordnung) der Alternative
Ai über die Alternative Aj liegt vor, wenn
’ x : P (Ai Æ x) Æ P (Aj Æ x) · ÷ x : P (Ai Æ x) < P (Aj Æ x)
…
’ x : P (Ai > x) Ø P (Aj > x) · ÷ x : P (Ai > x) > P (Aj > x)
§ Beispiel: Alternative A2 dominiert Alternative A1
A1
A2
10
20
50
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
100
62
Risikoeinstellung des Entscheiders
§ Risikoneutralität
§ Entscheider ist indifferent zwischen Alternativen mit
gleichem Erwartungswert
§ Risikoaversion
§ Entscheider zieht bei zwei Alternativen mit gleichem
Erwartungswert diejenige mit geringerer Streuung vor
§ Risikofreude
§ Entscheider zieht bei zwei Alternativen mit gleichem
Erwartungswert diejenige mit höherer Streuung vor
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
63
Risikoeinstellung des Entscheiders
§ Beispiel: Entscheidung über Teilnahme an einfachem
Glücksspiel (z.B. Münzwurf) mit Einsatz 10€
§ A1: Teilnahme, A2: Nicht-Teilnahme
§ S1: Gewinn, S2: Kein Gewinn
S1
S2
0.50
0.50
10
0
≠10
0
A1
A2
µ
‡
0.0
0.0
10.0
0.0
§ A1 oder A2 bei Risikoneutralität
§ A1 bei Risikofreude
§ A2 bei Risikoaversion
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
64
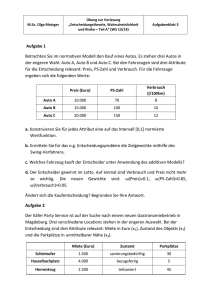
Indifferenzkurven nach Risikoeinstellung
‡
‡
‡
µ
Risikoneutralität
µ
Risikoaversion
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
µ
Risikofreude
65
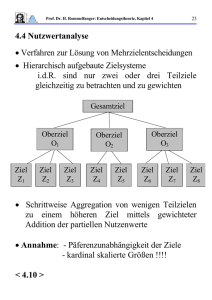
µ-Regel
§ μ-Regel beurteilt Alternativen nach ihrem Erwartungswert
(ursprünglich formuliert für den Fall einer Zielgröße)
(Ai ) = E(xij ) =
n
ÿ
j=1
xij · P (Sj )
§ Risikoeinstellung des Entscheiders nicht berücksichtigt
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
66
µ-Regel
§ Beispiel: Lotterie mit 5 Millionen im Jackpot und Einsatz 3€
§ A1: Teilnahme, A2: Nicht-Teilnahme
§ S1: Gewinn, S2: Kein Gewinn
A1
A2
S1
S2
14 · 10≠6
1 ≠ 14 · 10≠6
4, 999, 997
0
≠3
0
µ
¥ ≠2.64
0
§ Entscheider wird niemals an der Lotterie teilnehmen,
sofern er die µ-Regel anwendet
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
67
(µ,σ)-Prinzip
§ (µ,σ)-Prinzip berücksichtigt neben dem Erwartungswert
die Standardabweichung der Ergebnisse
zur Beurteilung der Alternativen
§ Präferenzfunktion Φ(Ai) = Φ(µi, σi) z.B. als
Linearkombination von Erwartungswert µi
und Standardabweichung σi definiert
(Ai ) = µi ≠ – · ‡i
mit α als Gewichtungsparameter, welcher die
Risikoeinstellung des Entscheiders erfasst
(α > 0 : Risikoaversion; α < 0 : Risikofreude)
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
68
(µ,σ)-Prinzip
§ Beispiel:
A1
A2
A3
S1
S2
S3
0.5
0.2
0.3
40
120
30
20
≠30
10
10
≠20
60
µ
‡
– = +1
–=0
– = ≠1
27.00
48.00
35.00
13.45
72.08
18.03
13.55
≠24.08
16.97
27.00
48.00
35.00
40.45
120.08
53.03
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
69
(μ,σ)-Prinzip und stochastische Dominanz
§ Stochastische Dominanz erster Ordnung und
(µ,σ)-Prinzip sind inkompatibel, d.h. wir
eliminieren u.U. optimale Alternativen
§ Beispiel:
A1
A2
S1
S2
0.50
0.50
100
50
100
100
µ
‡
100
75
0.00
35.35
A2 würde eliminiert, ist aber
für risikofreudige Entscheider
(z.B. α = -1.0) u.U. optimal
A1
A2
0
50
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
100
70
Petersburger Spiel
§ Petersburger Spiel (auch: Petersburger Paradoxon)
§ wiederholter Wurf einer fairen Münze (Kopf oder Zahl)
§ fällt im n-ten Münzwurf erstmals Zahl, so erhält Spieler 2n
§ Erwartungswert des Petersburger Spiels
1
1
1
µ = 2 · + 4 · + 8 · + ... = Œ
2
4
8
§ Ein nach der µ-Regel handelnder Entscheider wäre also
immer bereit, einen beliebig großen Betrag
einzusetzen und am Spiel teilnehmen
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
71
Bernoulli-Prinzip
§ Bisherige Ansätze zur Entscheidung bei Risiko
§ betrachten nur eine Zielgröße und
§ verdichten Zielgrößenwerte in den Parametern µ und σ
§ Bernoulli-Prinzip besteht aus zwei Schritten
§ bestimme für den Entscheider eine Nutzenfunktion U(xi)
(z.B. mittels Durchführung einer Bernoulli-Befragung)
§ wähle eine Alternative mit höchstem erwarteten Nutzen
(auch: Bernoulli-Nutzen, Erwartungsnutzen)
(Ai ) =
n
ÿ
j=1
U (xij ) · P (Sj )
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
72
Bernoulli-Prinzip
§ Wo liegt der Unterschied zur µ-Regel und (µ,σ)-Prinzip?
§ es können mehrere Zielgrößen betrachtet werden
§ explizite Betrachtung von Nutzen anstelle von Zielgröße
§ Nutzenfunktion erfasst Risikoeinstellung des Entscheiders
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
73
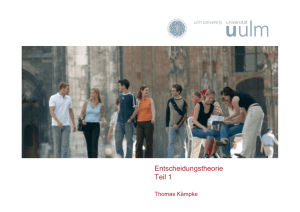
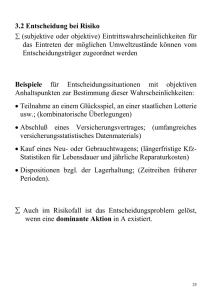
Nutzenfunktionen und Risikoeinstellung
§ Krümmung der Nutzenfunktion lässt auf die
tionale Entscheidung bei Risiko: Das Bernoulli-Prinzip
118
Rationale Entscheidung bei Risiko: Das Bernoulli-Pr
x
0
Risikoeinstellung des Entscheiders5 schließen
Risikoneutralität
U(x)
x
0
U(x)
U(x)
U(x)
U(x)
Risikoaversion
konkav
x
0
U(x)
Risikoneutralität
x
00
U
Risikoaversion
Risikofreude
xx
konvex
Abb. 5.1U(x)
Der Verlauf unterschiedlicher
Nutzenfun
veranschaulicht
bereits Abschn.
Quelle: Laux,werden
Gillenkirch(vgl.
und Schenk-Mathes
[1]
die Entscheidung gestellt, an einem Glückssp
Wahrscheinlichkeit 0,5 (z. B. durch den Wurf e
verlieren kann. Beträgt sein gegenwärtiges Verm
am Glücksspiel entweder W + ! oder W − !.
x
x
x
0
0
sind,xbeträgt0der Erwartungswert W. Ist der Ent
Risikofreude
ferent bezüglich der Teilnahme am Glücksspiel.
zenfunktionen
Abb. 5.1 Der Verlauf unterschiedlicher Nutzenfunktionen
strikt ab. Ein risikofreudiger Entscheider dageg
Um dieses Entscheidungsverhalten über da
Entscheidungsunterstützende
Systeme / Kapitel
2: Entscheidungstheorie
74
bschn.
4.4 des Kap. 4): Ein Entscheider
veranschaulicht
wird
vor
werden (vgl. bereits Abschn.
4.4der
desPräferenzfunktion
Kap. 4): Ein Entscheider
wird
tierung an
(5.1) nachzu
Bernoulli-Befragung
§ Nutzenfunktion des Entscheiders lässt sich mittels
Bernoulli-Befragung approximieren
§ bestimme schlechtestes und bestes Ergebnis xw und xb
§ für jedes Ergebnis bestimmt man die Wahrscheinlichkeit wi,
so dass der Entscheider indifferent ist zwischen
§ dem sicheren Ergebnis xi
§ einer Lotterie, die mit Wahrscheinlichkeit wi das Ergebnis xb und
mit Wahrscheinlichkeit (1-wi) das Ergebnis xw auszahlt
§ die ermittelten Wahrscheinlichkeiten wi können
als Werte der Nutzenfunktion U(xi)
interpretiert werden
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
75
Bernoulli-Befragung
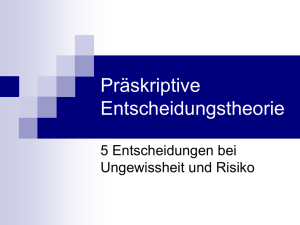
§ Beispiel: Ergebnisse xw = 0, 20, 40, 60, 80, 100 = xb möglich
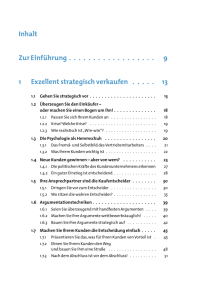
§ für x0 = 0 gibt Entscheider Wahrscheinlichkeit w0 = 0.0 an
§ für x1 = 20 gibt Entscheider Wahrscheinlichkeit w1 = 0.4 an
§ für x2 = 40 gibt Entscheider Wahrscheinlichkeit w2 = 0.6 an
§ für x3 = 60 gibt Entscheider Wahrscheinlichkeit w3 = 0.8 an
§ für x4 = 80 gibt Entscheider Wahrscheinlichkeit w4 = 0.9 an
§ für x5 = 100 gibt Entscheider Wahrscheinlichkeit w5 = 1.0 an
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
76
Bernoulli-Befragung
0.4
w
0.6
0.8
1.0
§ Beispiel: Ermittelte Nutzenfunktion
0.0
0.2
Risikoaverser
Entscheider
0
20
40
60
80
100
x
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
77
Zusammenfassung
§ Risikoeinstellung des Entscheiders spielt eine Rolle
§ risikoavers, risikoneutral oder risikofreudig
§ Entscheidung bei Risiko und einer Zielgröße
§ μ-Regel betrachtet nur Erwartungswert
§ (µ,σ)-Prinzip betrachtet Erwartungswert und Streuung
§ Bernoulli-Prinzip bei Risiko und beliebig vielen Zielgrößen
§ Bernoulli-Befragung zum Bestimmen einer Nutzenfunktion
§ Auswahl der Alternative mit höchstem erwarteten Nutzen
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
78
Literatur
[1]
H. Laux, R. M. Gillenkirch und H. Y. Schenk-Mathes:
Entscheidungstheorie,
Springer 2014 (Kapitel 4 und 5)
[2]
Hagenloch T.:
Grundzüge der Entscheidungslehre,
Books on Demand GmbH 2009 (Kapitel 4)
Entscheidungsunterstützende Systeme / Kapitel 2: Entscheidungstheorie
79