1. Schwingungen
Werbung

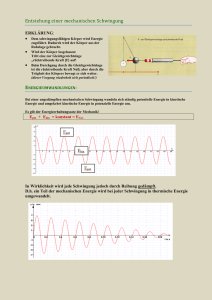
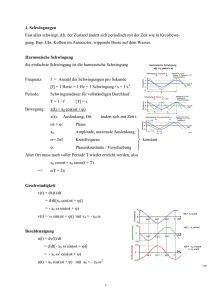
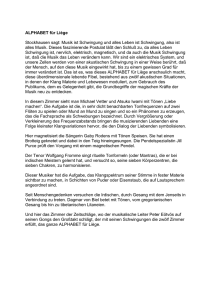
1. Schwingungen Physik 1 für Maschinenbau Seite 1 WS 05/06 Inhaltsverzeichnis Einführung / Kinematik und Dynamik 1. Schwingungen 1. Freie Schwingung 2. Einschub: Rotation / Starrer Körper 3. Gedämpfte Schwingung 4. Erzwungene Schwingung 5. Gekoppelte Schwingungen 2. Wellen 3. Schallwellen / Akustik 4. Atomphysik 5. Kernphysik Seite 2 Kap. 1 Schwingungen Technische Anwendungen / Erfahrungen Aber auch: • KFZ (od. MTB): Federung (mit / ohne Dämpfung) • Elektrischer Schwingkreis • Vibrationen des Motors • Motorblock auf Schwingungsdämpfern • Unwucht • Regelsystem: Thermostat • Elektromagnetische Wellen: Licht etc. • Energieniveaus in Atomen und Molekülen • Schlingerndes Schiff • Beschreibung von Elementarteilchen • Uhren: Pendel, Unruhe, Schwingquarz • String-Theorie • Populationen Jäger / Opfer • Akustik: Musik, Stimmgabel, Saite, • Wachstum von Bakterien Luftsäule (Nahrungsangebot / prod. Gifte) • Erdbeben (Wellen) • Oszillierende chemische Reaktionen Seite 3 1.1 Merkmale einer Schwingung Trägheit und Rückstellkraft Rückstellkraft Fr(t) = mg cos Wpot, max Wkin, max W pot (t ) m g h(t ) v mg Die periodische Zustandsänderung (Energieverschiebung) eines schwingungsfähigen Elementes (Oszillators) nennt man Schwingung; die periodische Zustandsänderung einer Vielzahl schwingungsfähiger Elemente nennt man Welle. h m I 2 Wkin (t ) v(t ) (t ) 2 2 2 T bezeichnet die Schwingungsdauer und f die Anzahl der Zyklen pro Zeiteinheit Es gilt : Ein träger Körper der sich an einem Minimum der Potentiellen Energie (Ruhelage) befindet kann durch Auslenkung aus der Ruhelage in Schwingungen versetzt werden. f 1 T Seite 4 1.1 Merkmale einer freien ungedämpften Schwingung: h Rückstellkraft Fr(t) = mg cos Wpot, max Wkin, max W pot (t ) m g h(t ) v mg h s m J 2 Wkin (t ) v (t ) (t ) 2 2 2 - Wird der Schwingung keine Energie von außen zugeführt, nennt man sie eine freie Schwingung. - Wird der Schwingung keine Energie z.B. in Form von Reibungsenergie entzogen, nennt man sie ungedämpfte Schwingung. Für eine freie ungedämpfte Schwingung gilt: W W pot (t ) Wkin (t ) konst. Ferner gilt: s (t ) s (t T ) bzw.: h(t ) h(t T ) Seite 5 1.1 Ungedämpftes freies Feder-MasseSystem Kraft F [N] Weg s [m] linear F s F N : D Federkonstante s m degressiv Druckfeder Zugfeder s progressiv Für eine lineare Feder gilt: F D s Ein lineares Feder-Masse-System nennt man Harmonischen Oszillator. Aufgaben 4 bis 8 Nr. 4: Schwingende Platte Nr. 6: Gleitkurbelgetriebe Nr. 10: Drei Federn Nr. 11: Anfangsbedingungen Nr. 12: U-Rohr Nr. 21: Standuhr (Physikalisches Pendel) Seite 6 1.1 Ungedämpftes freies Feder-MasseSystem F D s mg Für die Ruhelage s0 gilt: 0 D s0 mg 0 oder: mg D s0 F D s D s0 D ( s s0 ) D s s0 s 0 s s Neue Koordinaten: s00, ss F D s Schwingung ist unabhängig von konstanter äußerer Kraft, z. B. Gewichtskraft, konstante Beschleunigung Seite 7 1.1 Ungedämpfter freier harmonischer Oszillator Newtonsche Bewegungsgleichung: Lineare Feder: folgt: oder: d 2s Fa m a m 2 m s dt Fa D s m s Ds D s s 0 m Schwingungsgleichung des ungedämpften freien harmonischen Oszillators. (lineare homogene Differentialgleichung) Nr. 4: Schwingende Platte Nr. 6: Gleitkurbelgetriebe Nr. 8: Tunnel durch die Erde Nr. 10: Drei Federn Nr. 8: Tunnel durch die Erde Nr. 10: Drei2.MB Federn 11, 11.11.05 12 A8 Seite 8 1.1 Lösung der Schwingungsgleichung (des ungedämpften freien harmonischen Oszillators) Lösungsansatz: s (t ) sˆ cos( 0t 0 ) s(t ) 0 sˆ sin( 0t 0 ) und ergibt: s(t ) sˆ cos( 0t 0 ) 2 0 0 2 D m bzw.: Vergleich mit 2 0 2 f T0 D s s 0 m D m ŝ ist die Amplitude (Maximalauslenkung) der Schwingung, 0 ist der Phasenwinkel der Schwingung; sie ergeben sich aus zwei Anfangsbedingungen. Seite 9 1.1 Alternative: (Lösung der Schwingungsgleichung des ungedämpften freien harmonischen Oszillators) Lösungsansatz: s(t ) A cos( 0t ) B sin( 0t ) A und B ergeben sich aus den Anfangsbedingungen. s(t ) 0 A sin( 0t ) B cos( 0t ) ergibt: s(t ) 02 0 D m 2 A cos(0t ) B sin(0t ) bzw.: Vergleich mit 2 0 2 f T0 s D s 0 m D m Seite 10 1.1 Analogie elektr. / mech. Schwingung Trägheit und Rückstellkraft Masse und Federkraft Spule und Kondensator Nr. 11: Anfangsbedingungen Nr. 12: U-Rohr Nr. 21: Standuhr (physikalisches Pendel) aus Hering et al. Seite 11 r r Abb. aus Physik für Ingenieure, Hering, Martin Stroher, Springer Berlin, 2004 1.1 Analogie zur Kreisbewegung Seite 12 1.1 Analogie zur Kreisbewegung 2 sin 3 1! cos 1 e 1 1! 3! 2 2! 2 2! 5 ... 5! 4 4! ... 3 3! 4 4! ei cos i sin ... i 1 i 2 1 Seite 13 dW pot W pot W pot 1.1 Die potentielle Energie eines harmonischen Oszillators F ds s s s s s 0 s 0 F ( s) ds Dsds s 1 2 1 2 Ds Ds 2 0 2 0 s Seite 14 Aufgabe #10: Gekoppelte Federn A) Parallele Federn: B) Federn in Serie: s ges s1 s2 F Fges F1 F2 D1s D2 s F F D1 D2 1 1 F D2 1 D 1 Dges D1 D2 s Dges Dges D1 D2 oder allgemein: Dges Di i D2 F 1 1 1 Dges D1 D2 oder allgemein: 1 1 Dges i Di Seite 15 Aufgabe #10: Gekoppelte Federn 1 1 1 Dges D1 D2 D3 Dges D1 D2 D3 D1 D2 D3 Seite 16 Inhaltsverzeichnis Einführung / Kinematik und Dynamik 1. Schwingungen 1. Freie Schwingung 2. Einschub: Rotation / Starrer Körper 3. Gedämpfte Schwingung 4. Erzwungene Schwingung 5. Gekoppelte Schwingungen 2. Wellen 3. Schallwellen / Akustik 4. Atomphysik 5. Kernphysik Seite 17 Einschub: Kinematik der Drehbewegung starrer Körper Gleichförmige Drehbewegung 0 const. ( t ) 0 t 0 Gleichmäßig beschleunigte Drehbewegung const. d ( t ) 0 0 t t ; ( t ) 0 t 2 dt 2 Winkelgeschwindigkeit und –beschleunigung als Vektoren v r at r beschreibt Änderung des Betrags der Geschwindigkeit Man beachte die Rechte Hand Regel! Seite 18 Einschub: Kinematik der Drehbewegung Normal-Anteil der Beschleunigung a n v r beschreibt Änderung der Richtung der Geschwindigkeit Gesamter Vektor der Beschleunigung a at a n r r dv n Spezialfall: Kreisbewegung, Winkelg. senkrecht zu Radius r 2 a n r y v (t ) at (t ) r (t ) (t ) an (t ) x Seite 19 Einschub: Dynamik der Drehbewegung; Drehmoment Drehmoment (= Radiusvektor x Kraftvektor) M r F Einheit Nm F M r 0; Drehpunkt Betrag des Drehmoments M r F sin r , F r F sin rF sin Rechte Winkel Seite 20 Einschub 2: Vektoren a1 a a2 a 3 Z.B.: , b1 b b2 b 3 , c1 c c2 c 3 ,… s1 s s2 s 3 s1 s1 t v s s2 s2 t s s t 3 3 2 2 s1 s1 t 2 2 a v s s2 s2 t s 2 s t 2 3 3 Seite 21 Einschub 2: Rechnen mit Vektoren Summe: a1 b1 a b a2 b2 a b 3 3 Skalarprodukt: Beispiel: a b a b Multiplikation mit einem Skalar: a a a1 a a2 a 3 a1 b1 a b a2 b2 a1b1 a2b2 a3b3 a b cos a , b a b a b 3 3 Ekin 1 2 1 1 2 mv m v12 v22 v32 m v 2 2 2 a Seite 22 Einschub 2: Rechnen mit Vektoren Vektorprodukt: (kart. Koordinaten) a1 b1 a2b3 a3b2 a b a2 b2 a3b1 a1b3 a b a b a b 3 3 1 2 2 1 b a b a a b a b sin a , b Spatprodukt: (Vol. Spat) a1 b1 c1 a1 a b c a2 b2 c2 b1 a b c c 1 3 3 3 i , j ,k ai b j ck i , j ,k a2 b2 a3 b3 c2 c3 a b c b a Seite 23 Einschub 2: Rechenregeln Es gilt: a b b a Es gilt: a b c a b a c aber: a b b a und: a b c a b a c Seite 24 Einschub: Massenschwerpunkt Schwerpunkt wird definiert zu: 1 1 1 s s m i si r dm r dV m i m m aus Demtröder Seite 25 Einschub: Kinetische Gesamtenergie Es gibt 6 Freiheitsgrade der Bewegung für Starren Körper: Jeweils 3 für Translation und Rotation Separation der Bewegung in Translation und Rotation des Schwerpunkts: – Jede Bewegung eines starren Körpers lässt sich eine Rotationsbewegung um den Schwerpunkt und eine Translationsbewegung des Schwerpunkts zerlegen Gesamte Kinetische Energie des Starren Körpers E Kin ETranslation E Rotation 1 2 ETranslation mv s 2 1 1 2 2 2 E Rotation mi ri s J s 2 i 2 Seite 26 Einschub: Dynamik der Drehbewegung Massenträgheitsmoment (analog zu Masse) I r 2 dV speziell I r 2 dm Spezialfall: Kreisbewegung mit Radius r einer Masse m I m r2 aus Demtröder Steiner‘scher Satz: Drehung um Achse parallel zu einer Hauptträgheitsachse (=Drehachse durch den Schwerpunkt), Drehachse ist s von Hauptträgheitsachse entfernt I A I S ms aus Dobrinski 2 Seite 27 Einschub: Einige Trägheitsmomente aus Hering Seite 28 Einschub: Einige Trägheitsmomente aus Hering Seite 29 Einschub: Dynamik der Drehbewegung starrer Körper, Grundlegende Erfahrungen Es gibt 3 Hauptträgheitsachsen aus Dobrinski 1. Achse mit minimalem Trägheitsmoment 2. Achse mit maximalem Tragheitsmoment 3. Achse senkrecht zu 1. und 2. Kräftefreie Rotation – Rotationsachsen gehen durch den Schwerpunkt – Stabile Rotation bildet sich aus bei Drehung um Achse mit minimalem und mit maximalem Trägheitsmoment. Beispiel: Rotierender Quader – Es treten keine Lagerkräfte auf Auswuchten von Drehachsen, um Lagerkräfte zu vermeiden Seite 30 Einschub: Dynamik der Drehbewegung 2. Newton‘sches Axiom für Drehbewegungen M J J [Nm] – entspricht F = ma bei Translation Drehimpuls L J ; dL M dt [Nms] – entspricht p = mv bzw. dp = Fdt bei Translation Energie bzw. Leistung rot E kin 2 J [Nm J]; P M [J/s W] – entspricht E = ½ mv2 bzw. P = Fv bei Translation Seite 31 1.1 Freie Schwingung: Das Fadenpendel Rückstellkraft: FR mg sin 3 5 mg ... mg 3! 5! l Newton: d 2s d 2 (l ) d 2 ( ) Fa m a m 2 m ml m l 2 2 dt dt dt mg oder Lösung: mg sin m l nichtlineare DGL mg m l g 0 l (t ) ˆ cos(0t 0 ) mit 0 g l Seite 32 1.1 Das Fadenpendel über Momente Rückstellmoment M R l FG sin lmg sin M R l FG 3 5 mg ... mg 3! 5! l Newton: M T J Trägheitsmoment M T m l 2 mg oder Lösung: lmg sin m l 2 nichtlineare DGL mg m l g 0 l (t ) ˆ cos(0t 0 ) mit 0 g l Seite 33 1.1 Freie Schwingung: Das Torsionspendel Für das Rückstellmoment des Drahtes gelte: ~ M D Newton bei Rotationsbewegungen: M I A I A Lösung: ~ I A D (t ) ˆ cos(0t 0 ) ~ D 0 IA mit 0 ~ D IA Seite 34 1.1 Freie Schwingung: Das physikalische Pendel Rückstellmoment: Kraft greift im Schwerpunkt an 3 5 M R mgs sin mgs ... mgs 3! 5! mit: M s F s mg bzw.: M M s mg sin Newton: M I A Lösung: mgs 0 IA s (t ) ˆ cos(0t 0 ) mit Nr. 28: Mathematisches Pendel im Aufzug Nr. 29: Schaukelpferd Nr. 32.: Gedämpftes Schwingungssystem I Nr. 33: Gedämpftes Schwingungssystem II Nr. 34: Gedämpftes Schwingungssystem III mgs IA mg Seite 35 Inhaltsverzeichnis Einführung / Kinematik und Dynamik 1. Schwingungen 1. Freie Schwingung 2. Einschub: Rotation / Starrer Körper 3. Gedämpfte Schwingung 4. Erzwungene Schwingung 5. Gekoppelte Schwingungen 2. Wellen 3. Schallwellen / Akustik 4. Atomphysik 5. Kernphysik Seite 36 1.2 Gedämpfte Schwingung: Reibung Wichtige Beispiele: 1. Coulomb-Reibung, (z.B. Gleit- und Rollreibung) Geschwindigkeitsunabhängig: FR= - µ FN 2. Schmiermittelreibung Proportional zur Wurzel der Geschwindigkeit: FR= - cv1/2 3. Stokes-Reibung oder Viskose Reibung z.B. in Flüssigkeiten Proportional zur Geschwindigkeit: FR= - r v 4. Newton-Reibung, z.B. Luftwiderstand Proportional zum Quadrat der Geschwindigkeit: FR= - cv2 Seite 37 1.2 Schwingung mit konstanter Reibung (Coulomb-Reibung) FR FN mit gilt: FN m D s0 m D ~ ~ s s 0 m Ersetzten von Ergibt: ms Ds FN ~ s und oder F D s N 0 m m (inhom. lin. DGL) s s0 ~ s (hom. lin. DGL) durch s Lösung ~ s (t ) ~ sˆ cos(0t 0 ) s s0 s (t ) ( sˆ s0 ) cos(0t 0 ) s0 mit 0 D m Seite 38 1.2 Schwingungsverlauf y(B)=y(A)-2s0 -s0 +s0 y(C)=y(B)-2s0 +s0 Jede Halbschwingung findet um s0 verschobene xAchse statt AB: Amplitude nimmt um 2s0 ab BC: Amplitude nimmt um weitere 2s0 ab Amplituden werden pro Schwingung um 4s0 kleiner Arithmetische Reihe Einhüllende ist Gerade Schwingung kommt irgendwann zur Ruhe, muss nicht im Nullpunkt sein z. B. Statistisch schwankender Einstellfehler bei Zeigerinstrumenten Seite 39 1.2 Schwingung mit viskoser Reibung (Stokes-Reibung) FR rv rs Reibungskraft mit Dämpfungskonstante r proportional zur Geschwindigkeit ms rs D s bzw. s r D s s 0 m m komplexer Lösungsansatz: also z z (t ) zˆe t r D z z 0 mit Rez t s t m m r D 2 e t 0 m m r D 2 0 m m Eigenwertgleichung für den Eigenwert Lösung der Eigenwertgleichung: 1, 2 r r2 D 2m 4m 2 m 1. Fall r 2 mD (schwache Dämpfung, Radikant < 0) 2. Fall r 2 mD (mittlere Dämpfung, Radikant = 0) 3. Fall r 2 mD (starke Dämpfung, Radikant > 0) Seite 40 1. Fall: Schwache Dämpfung, Periodischer Fall r 2 mD 1, 2 r r2 D 2 2m 4m m mit r 2m und D r2 2 02 2 m 4m 1, 2 i 02 2 i z (t ) zˆe ( i )t zˆ ei0 e t e it zˆ e t ei t 0 Für den Realteil von s(t), der den physikalischen Schwingungsvorgang beschreibt gilt: s(t ) sˆe t cost 0 ~ e t Schwingfall Kreisfrequenz ist kleiner als im ungedämpften Fall e t ist Einhüllende cost 0 Seite 41 2. Fall: Aperiodischer Grenzfall 1, 2 r r2 D 2m 4m 2 m mit r 2m und D r2 0 2 m 4m o r 2 mD 1, 2 s1 (t ) C1e t eine weitere Lösung ist: s2 (t ) C2te t s (t ) C1 C2t e t Aperiodischer Grenzfall Amplitude wird 0 bei T0: Es tritt gerade keine Schwingung auf z.B. Analoge Zeigerinstrumente Anzeigenwert soll möglichst schnell erreicht werden, ohne dass der Zeiger zu schwingen beginnt T0 Seite 42 3. Fall: Starke Dämpfung, Kriechfall r 2 mD 1, 2 r r2 D 2m 4m 2 m r mit 2m und r2 4m 2 D 2 02 m 2 02 t 2 02 t t t s (t ) C1e C2 e C1e C2 e Kriechfall Es tritt keine Schwingung mehr auf; Amplitude wird 0 bei t > T0 Wie in 1. und 2. auch werden C1 und C2 über die Anfangsbedingungen x(0) und v(0) bestimmt T0 Seite 43 Dämpfung bei verschiedenen Arten der Reibung: FR v n Coulomb-Reibung Schmiermittelreibung Stokes-Reibung (viskose Reibung) Newton-Reibung Seite 44 Wichtige Kenngrößen bei gedämpften Schwingungen FR rv rs Die Dämpfungskonstante r ist ein Maß für die Dämpfung in frei schwingenden, abklingenden Schwingungssystemen. r hat die Einheit [kg/s] Logarithmisches Dekrement: ln sn T sn 1 Das logarithmische Dekrement ist ein Maß für das Dämpfungsverhalten in frei schwingenden, abklingenden Schwingungssystemen. Das Formelzeichen ist Λ (großes Lambda). Es errechnet sich aus dem natürlichen Logarithmus des Verhältnisses der Amplitude zweier aufeinander folgender Ausschläge in die gleiche Richtung. Λ ist ohne Einheiten Seite 45 Wichtige Kenngrößen bei gedämpften Schwingungen Dämpfungsgrad/-maß: m D 0 4 2 2 Das Dämpfungsmaß (auch Dämpfungsgrad oder Lehrsches Dämpfungsmaß) ist eine Größe für die Dämpfung einer Schwingung. ist dimensionslos ohne Einheiten Das Formelzeichen ist ein . = Abklingkonstante / Eigenkreisfrequenz Der doppelte Wert wird Verlustfaktor d genannt. Sein Kehrwert ist die Güte Q = 1/d Gütefaktor: Q 2 Energie E Energieverlust / Periode E 2 Dm r Seite 46 Aufgabe zu Gedämpfte Schwingung r Das Fahrzeug wird nun mit 240 kg beladen. Welche Eigenfrequenz besitzt ein Vorderachsen-Federbein jetzt? Seite 47 Aufgabe 34 zu Gedämpfte Schwingung Seite 48 Inhaltsverzeichnis Einführung / Kinematik und Dynamik 1. Schwingungen 1. Freie Schwingung 2. Einschub: Rotation / Starrer Körper 3. Gedämpfte Schwingung 4. Erzwungene Schwingung (Resonanz) 5. Gekoppelte Schwingungen 2. Wellen 3. Schallwellen / Akustik 4. Atomphysik 5. Kernphysik Seite 49 Java Applet zu Erzwungenen Schwingungen http://www.walter-fendt.de/ph14d/resonanz.htm Seite 50 1.3 Erzwungene harmonische Schwingungen (EHS) mit viskoser Reibung FE FˆE cosE t Anregung eines Oszillators mit externer Kraft: Bewegungsgleichung: ms rs D s FˆE cosE t Trägheitskraft Reibungskraft Rückstellkraft Zur Erinnerung: Ohne externe Kraft: Gedämpfte harmonische Schwingung mit D r2 2 02 2 m 4m Seite 51 1.3 EHS (mit viskoser Reibung) Mit externer Kraft: Nach Einschwingzeit folgt das System der äußeren Anregung mit der Frequenz E : System = E Die Amplitude dieser Schwingung mit System hängt dabei stark von der relativen Lage und E ab. Außerdem folgt die Auslenkung s der externen Kraft mit einer gewissen Verzögerung. Es ergibt sich also eine Phasenverschiebung zwischen FE und s. s sˆ cosE t Seite 52 1.3 EHS (mit viskoser Reibung) Für die stationäre Lösung (nach dem Einschwingvorgang) bedeutet das: mE2 sˆ cosE t rE sˆ sinE t Dsˆ cosE t FˆE cosE t Für sehr kleine Frequenzen (E D m und E D r ) bedeutet das: Das System wird von der Rückstellkraft dominiert. Trägheits- und Reibungskräfte spielen Fˆ s cosE t , D kaum eine Rolle. Es gilt: Für sehr große Frequenzen (E D m ( 0) und E D r ) bedeutet das: Das System wird von der Trägheitskraft dominiert. Rückstell- und Reibungskräfte spielen kaum eine Rolle. Es gilt: s Fˆ m 2 cosE t , d.h. ( ) In beiden Fällen sind externe Kraft und Geschwindigkeit um /2 versetzt. Wegen P=FEv nimmt das System während eines vollständigen Schwingungsdurchgangs also insgesamt keine Energie auf. Seite 53 1.3 EHS (mit viskoser Reibung): Resonanz (v = maximal) Mit wachsender Phasenverschiebung wird bei -/2 ein Wert erreicht, bei dem externe Kraft und Geschwindigkeit in Phase sind. Jetzt nimmt das System ständig Energie auf. Würde die zugeführte Energie nicht durch Reibung verzehrt, dann würde die Amplitude der Schwingung unendlich werden (Resonanzkatastrophe). Die zugeführte Leistung muss also in Mittel gleich der Leistung durch Reibungskraft sein. D.h.: FE v FR v sˆ Fˆ rE bzw. , FˆE cosE t rE sˆ sinE t ( ) 2 Der Vergleich mit der Bewegungsgleichung ergibt, dass in diesem Fall die äußere Kraft genau durch die Reibungskraft kompensiert wird. Das bedeutet aber auch, dass gelten muss: E D m 0 Anmerkung: Im Fall = -/2 ist zwar die Energiezufuhr maximal, die maximale Schwingungsamplitude wird jedoch schon bei einer etwas geringeren Phasenverschiebung 2 2 erreicht, da dann die Reibung etwas kleiner ist. 0 2 Seite 54 1.3 EHS (mit visk. Reib.) RESONANZ aus Gerthsen bei 02 2 2 maximale Amplitude Bei = 0 nur Kraft gegen Feder bei 0 maximaler Leistungeintrag Bei = Amplitude 0 Endliche Amplitude durch Dämpfung Vermeidung Resonanzkatastrophe Phasenverschiebung bei <<0 ist KLEIN Phasenverschiebung bei 0 ist 90° Phasenverschiebung bei >>0 ist 180° Seite 55 1.3 EHS (mit viskoser Reibung): Resonanz k r Reibungskonstante r 2 Dämpfungsgrad mD aus Gerthsen Seite 56 1.3 EHS (mit viskoser Reibung) Die Bewegungsgleichung ms rs D s FE mit FE FˆE cosE t bzw. s r D F s s E m m m ist eine inhomogene lineare Differenzialgleichung. Da FE keine Konstante ist, führt eine einfache Koordinatentransformation, wie bei der Coulomb‘schen Reibung, hier nicht auf eine homogene lineare DGL! Für inhomogen lineare DGLn gilt folgende Regel: Kennt man eine spezielle (auch partikulär genannte) Lösung der inhomogenen Gleichung, so ist die allgemeine Lösung der inhomogenen Gleichung die Summe aus dieser partikulären Lösung und der allgemeinen Lösung der dazugehörigen homogene linearen DGL: allgemein partikülär st inhomogen st allgemein s t homogen inhomogen oder komplex: allgemein partikülär zt inhomogen z t allgemein z t homogen inhomogen Seite 57 1.3 EHS (mit viskoser Reibung) Die Lösung der dazugehörigen homogenen linearen DGL ist die Lösung des gedämpften Schwingung mit viskoser Reibung. Diese Lösung nimmt exponentiell mit der Zeit ab und beschreibt den „Einschwingvorgang“. Danach (d.h. für t>>1/) wird die allgemeine Lösung der inhomogenen Gleichung nur noch von der partikulären Lösung bestimmt. D.h. die Masse folgt dann der externen Kraft FE FˆE eiEt Damit muss auch z zˆeiE t eine partikuläre Lösung der inhomogenen DGL sein. mit r D FˆE eiEt z z z m m m iE r D FˆE 2 folgt zˆ E m m m zˆ sˆ m 02 FˆE 2 2 E2 E 2 oder und FˆE zˆ i 2E m 2 0 2 E 2 E E arctan 2 2 0 E Seite 58 1.3 EHS: Aufgabe 39 Seite 59 1.3 EHS: Aufgabe 40 Seite 60 Inhaltsverzeichnis Einführung / Kinematik und Dynamik 1. Schwingungen 1. Freie Schwingung Einschub: Rotation / Starrer Körper 2. Gedämpfte Schwingung 3. Erzwungene Schwingung (Resonanz) 4. Überlagerte Schwingungen 5. Gekoppelte Schwingungen 2. Wellen 3. Schallwellen / Akustik 4. Atomphysik 5. Kernphysik Seite 61 1.4.Überlagerung von Schwingungen 1.4.1 Schwingungen gleicher Frequenz s1 sˆ1 cost 1 und s2 sˆ2 cost 2 sneu sˆneu cost neu mithilfe Kosinussatzes mit sˆneu sˆ12 sˆ22 2sˆ1sˆ2 cos1 2 und sˆ1 sin1 sˆ2 sin2 tan neu sˆ1 cos1 sˆ2 cos2 Neue Schwingung hat gleiche Frequenz wie die ursprüngliche Schwingungen, gilt auch für mehr als zwei Schwingungen Amplitude - hängt von Phasendifferenz ab Interferenz - kann von sˆneu sˆ1 sˆ2 ( 0 für 1 2 ) bis zur vollen Summe sˆneu sˆ1 sˆ2 (für 1 2 ) gehen Seite 62 1.4.Überlagerung von Schwingungen 1.4.2 Schwebungen (geringer Frequenzunterschied) Überlagerung von zwei Schwingungen gleicher Amplitude und Phase: s1 sˆ cos1t und s2 sˆ cos2t mit 1 2 cos cos 2 cos Mit dem Additionstheorem cos 2 2 2 1 2 s 2sˆ cos 1 t cos t 2 2 gilt: 2 Die resultierende Schwingung hat also die Frequenz neu 1 2 Die Amplitude dieser Schwingung wird mit dem Term D.h., dass die Amplitude mit der Schwebungsfrequenz 2 cos 1 2 S 1 2 t moduliert. zunimmt und abnimmt. Seite 63 1.4.Überlagerung von Schwingungen f1 1,0 Hz f2 Tneu 1 f neu 10 Hz 0,9091 Hz 11 2 2 s 1,04761 s f1 f 2 1,0 0,9091 Ts 1 1 1 s 11,0011 s f s f1 f 2 1,0 0,9091 Seite 64 1.4.Überlagerung von Schwingungen 1.4.3 Fourieranalyse: Jede periodische Funktion lässt sich als Überlagerung von Schwingungen mit ganzzahligen Frequenzverhältnissen darstellen. Z.B.: s1 sˆ sint 1 s2 sˆ sin3t 3 1 s3 sˆ sin5t 5 1 1 sgesamt sˆ sin t sˆ sin 3t sˆ sin 5t 3 5 Das Spektrum (Abb. c) zeigt aus welchen Grundfrequenzen sich die resultierende Gesamtschwingung (Abb. b) zusammensetzt. Seite 65 1.4.Überlagerung von Schwingungen 1.4.4 Senkrechte Bewegungsrichtungen (Lissajous-Figuren): Seite 66 Inhaltsverzeichnis Einführung / Kinematik und Dynamik 1. Schwingungen 1. Freie Schwingung Einschub: Rotation / Starrer Körper 2. Gedämpfte Schwingung 3. Erzwungene Schwingung (Resonanz) 4. Überlagerte Schwingungen 5. Gekoppelte Schwingungen 2. Wellen 3. Schallwellen / Akustik 4. Atomphysik 5. Kernphysik Seite 67 1.5 Gekoppelte Schwingungen Bisher: – 1.3 Erzwungene Schwingung: Oszillator mit Einwirkung von Kraft mit unendlichem Energievorrat – 1.4 Überlagerung von Schwingung: Zwei Oszillatoren ohne gegenseitige Beeinflussung – 1.5 Zwei Oszillatoren mit ähnlichem Energievorrat mit Kopplung DK Kopplung ist relativ „schwache“ Feder mit Federkonstante DK zwischen den Oszillatoren D1 und D2: DK << D1, DK << D2 Energieaustausch zwischen Oszillator 1 und 2: Energie des Oszillators 1 wird durch die Kopplung auf den Oszillator 2 übertragen (Anstoss eines Oszillators) – Energieübertrag schneller je „stärker“ Kopplung – Bei gleichen Oszillatoren: Vollständiger Energieübertrag – Bei verschiedenen Oszillatoren: Energieübertrag kehrt sich bereits vor vollständigem Austausch um Zwei Zustände ohne Energieübertrag (gleichzeitiges Anstossen): – Fundamentalschwingungen / Normalmoden – Gleichphasige Schwingung: = 0° – Gegenphasige Schwingung: = 180° Seite 68 1.5 Gekoppelte Schwingungen: Fundamentalschwingungen Annahme: D1 = D2 = D, DK = konstant und m1 = m2 = m a) Gleichphasige Schwingung: Kopplungsfeder entspannt, gleichzeitiges Anstoßen 1 0 D m bzw. f1 f 0 1 2 D m aus Hering: D oder c Fenderkonstante b) Gegenphasige Schwingung: Mitte der Kopplungsfeder bleibt konstant, gleichzeitiges Anstoßen 2 D 2Dk m bzw. f2 1 2 D 2 Dk m Seite 69 1.5 Gekoppelte Schwingungen Überlagerung der Fundamentalschwinungen c) Überlagerung von Fundamentalschwingung (Schwebung): 2 s1 sˆ cos 1 2 t cos 1 t 2 2 1 2 1 2 ˆ s2 s sin t sin t 2 2 D.h.: Oszillator 1 ist um 90° zu Osz. 2 verschoben S 2 1 und neu bzw. 2 1 2 f S f 2 f1 f f2 bzw. f neu 1 2 aus Hering k Dk D Dk bezeichnet den Kopplungsgrad Seite 70 1.5 Gekoppelte Schwingungen: Kopplungsgrad d) Kopplungsgrad: Unterschied der Energie von Osz 1 und Osz 2 (W1 – W2) im Verhältnis zur Mittleren Schwingungsenergie (W1 – W2)/2., Faktor ½ kann weggelassen werden Dk W1 W2 f12 f 22 k 2 W1 W2 f1 f 22 D Dk Je stärker Kopplungsgrad, umso stärker ist die Aufspaltung f2 – f1 Lose Kopplung. k<<1: Starke Kopplung: k~1: Seite 71 Aufgaben Nr.1: Sinusverlauf bei Federpendeln Nr.2: Federpendel Nr. 4: Schwingende Platte Nr. 6: Gleitkurbelgetriebe Nr. 8: Tunnel durch die Erde Nr. 10: Drei Federn Nr. 11: Anfangsbedingungen Nr. 12: U-Rohr Nr. 17: Eiskunstläufer Seite 72 Aufgaben Nr. 21: Standuhr (physikalisches Pendel) Nr. 28: Mathematisches Pendel im Aufzug Nr. 29: Schaukelpferd Nr. 32.: Gedämpftes Schwingungssystem I Nr. 33: Gedämpftes Schwingungssystem II Nr. 34: Gedämpftes Schwingungssystem III Weitere Aufgaben: Nr. 37,39,40,42,44,45,46,47,54, 56,57,59-63,64,65-68,71,72,73,74,77,78, 82,84,87,88,89,90,91,93,98,101 Seite 73