1 3. Vektoren 3.1 Definition, Einheitsvektoren, Rechenregeln Neben
Werbung

3Wo_Vektoren_12-5-16-Skript
3. Vektoren
3.1
Definition, Einheitsvektoren, Rechenregeln
Neben skalaren Größen, also Zahlen mit Maßeinheit wie Masse, Energie, Druck usw.
verwenden wir in der Physik vektorielle Größen, z.B. Ortsvektor, Geschwindigkeit, Kraft,
Feldstärke usw. Vektoren besitzen eine Länge, den Betrag des Vektors (Skalar), und eine
Richtung.
Wir vereinbaren folgende Notation: Vektor a (einfach unterstrichen), Länge (Betrag) des
Vektors a: a a .
Drei Zahlen sind im dreidimensionalen Raum zur eindeutigen Bestimmung des Ortsvektors
ausreichend. Im kartesischen Koordinatensystem werden die drei senkrechten Projektionen x,
y, z auf die Koordinatenachsen verwendet, in sphärischen Koordinaten die
Länge des Vektors, r, und die beiden Winkel und :
x r cos sin ,
y r sin sin ,
z r cos .
r x 2 y2 z 2
Definition: Vektoren im dreidimensionalen Raum sind geordnete Zahlentripel,
x
a1
r y , a a 2 usw.,
a
z
3
die sich auf ein Koordinatensystem beziehen und für die bestimmte Rechenregeln gelten.
Bem.: geordnete Zahlentripel.
(i) Ein Zahlentripel aus Temperatur, Druck und Volumen bildet keinen Vektor.
(ii) Der Physiker verlangt, dass sich Vektoren bei Rotation des Koordinatensystems gemäß
a ' D a transformieren. D ist eine sogenannte Drehmatrix (vgl. Vorlesung 4. Woche). Die
Länge eines Vektors und der Winkel zwischen zwei Vektoren sind invariant gegen Rotation
des Koordinatensystems.
Einheitsvektoren (EHV) sind Vektoren der Länge Eins; sie sind besonders gut zur
Kennzeichnung von Richtungen geeignet.
1
Für einen beliebigen Vektor a der Länge a ist e
1
a der Einheitsvektor in Richtung von a.
a
Kartesische Koordinatensysteme im dreidimensionalen Raum lassen sich durch die senkrecht
aufeinanderstehenden Einheitsvektoren in Richtung der Koordinatenachsen
1
0
0
e x e1 0 , e y e 2 1 bzw. e z e3 0
0
0
1
festlegen. Die Darstellung
a a x e x a y e y a z e z oder
a a 1 e1 a 2 e 2 a 3 e 3
heißt Komponentendarstellung des Vektors a bzgl. der Basis (ex, ey, ez) bzw. (e1, e2, e3).
3.2
Rechenregeln für Vektoren
Für Vektoren sind die Addition und die Multiplikation mit einer Zahl definiert: Vektoren
werden addiert, indem man ihre Komponenten addiert (Kräfteparallelogramm; die Addition
ist kommutativ).
Zur Multiplikation eines Vektors mit einer Zahl werden die Komponenten des Vektors mit
dieser Zahl multipliziert.
■ Multiplikation mit -1 kehrt die Richtung von a um.
■a=ae
Produkte aus zwei Vektoren:
Es gibt zwei physikalisch sinnvolle Möglichkeiten, zwei Vektoren a und b miteinander zu
multiplizieren, das Skalarprodukt a b und das Vektorprodukt a b .
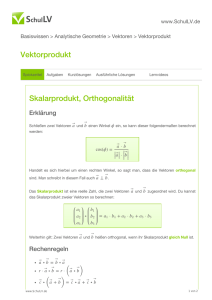
3.2.1 Skalarprodukt (inneres Produkt)
Def.: Skalarprodukt der Vektoren a und b ist der Skalar (die Zahl)
a1
b1
3
a a 2 , b b 2 : a b : a b|| a || b a b cos a i bi .
i 1
a
b
3
3
2
a || und b|| bezeichnen die Projektionen von a auf b und umgekehrt, ist der Winkel zwischen a
und b, es gilt
b
a
.
b|| a ||
Ausgewählte Eigenschaften des Skalarprodukts:
- a b b a (Skalarprodukt kommutativ)
- speziell gilt e e 1 für alle EHVen
- Betrag, Länge des Vektors a : a a : a a
im R 3
a12 a 22 a 32
- Orthogonalität: Zwei Vektoren a und b heißen orthogonal genau dann, wenn a b 0 .
■
Bei der Verschiebung eines Körpers K um r durch eine im Schwerpunkt von K
angreifende Kraft F ist die verrichtete Arbeit A proportional zu F cos, also proportional
zur senkrechten Projektion von F auf r (das ist die Komponente der Kraft F in Richtung der
Verschiebung r ) und zum Betrag der Verschiebung r . ist der Winkel zwischen den
beiden Vektoren F und r . Also haben wir A F r cos : F r und bei infinitesimaler
Verschiebung dr für die verrichtete Arbeit das Skalarpodukt aus F und dr
dA F dr .
Skalarprodukt in Komponentenschreibweise:
3
a b ( a 1 e1 a 2 e 2 a 3 e 3 ) ( b1 e1 b 2 e 2 b 3 e 3 ) a 1b1 a 2 b 2 a 3b 3 a i b i
i 1
0, i j
denn e i e j
,
1, i j
weil die EHV {e i } paarweise senkrecht aufeinander stehen.
Zur Vereinfachung der Schreibweise hat Einstein vorgeschlagen, über doppelt vorkommende
Indices zu summieren, ohne das Summenzeichen anzugeben:
3
a b a i bi a i bi .
Summenkonvention
i 1
3
Bequem ist auch die Einführung des Kronecker-Symbols
0, i j
.
ij : ei e j
1, i j
Dann haben wir statt der ganzen Schreiberei oben einfach
a b a i ei b k e k a i b k ei e k a i b k ik a i b i .
Überzeugen Sie sich von der Richtigkeit der Relationen
ii nn 3 , ij jk ik , c k a i a j b k ij a 2 (c b) .
3.2.2 Vektorprodukt (Kreuzprodukt, äußeres Produkt)
Definition: Das Vektorprodukt aus zwei Vektoren a und b ist der Vektor, dessen Betrag gleich
der Fläche des durch a und b definierten Parallelogramms ist, a b a b sin , und der
senkrecht auf der durch a und b aufgespannten Ebene steht ( a b a , b )
a b a b sin e .
bezeichnet wieder der Winkel zwischen a und b. Der EHV e und die EHVen in a und b
Richtung bilden ein Rechtssystem (Rechte-Hand-Regel). Außerdem gilt a b b a .
■ Lorentz-Kraft FL auf eine Punktladung q, die sich mit der Geschwindigkeit v in einem
Magnetfeld der Induktion B bewegt
FL q v B .
Die Lorentz-Kraft steht senkrecht auf v und B; die drei Vektoren FL, v und B bilden ein
Rechtssystem.
4
■
Drehmoment M r F
Die Kraft F greift in einem Punkt P mit dem Ortsvektor an einem um den Koordinatenursprung O drehbar gelagerten Körper K an. Die Kraftkomponente F sin erzeugt das
Drehmoment M. Die drei Vektoren M, r und F bilden ein Rechtssystem.
■
Drehimpuls L r p .
Vektorprodukt in Komponentenschreibweise: Das Vektorprodukt aus
a1
b1
a a 2 , b b 2 ist der Vektor
a
b
3
3
e1
e2
e3
c a b a1
b1
a2
b2
a3
b3
e1
a2
a3
b2
b3
e2
a1
a3
b1
b3
e3
a1
b1
a2
e1 (a 2 b 3 a 3 b 2 ) e 2 (a 1b 3 a 3 b1 ) e 3 (a 1b 2 a 2 b1 )
b2
Zur Vereinfachung der Schreibweise verwenden wir das - oder Levi-Civita-Symbol
1, wenn i, j, k zyklisch zu 1,2,3 (123, 231, 312)
ijk : e i e j e k 1, wenn i, j, k antizyklisch zu 1,2,3 ( 213, 132, 321) .
0, ansonsten ( z.B. mindesten zwei gleiche Indices)
Man zeigt leicht, dass
3
c a b ijk a i b j e k
i , j, k
gilt oder verkürzt unter Verwendung der Summenkonvention
c a b ijk a i b j e k ,
bzw.
ci (a b)i ijk a j b k .
5
4. Matrizen und Determinanten
Eine Matrix A ist ein Schema von m n Zahlen aij bestehend aus i 1, 2, ... , m Zeilen und
j 1, 2, ... , n Spalten
a11 a12 a1n
a 21 a 22 a 2 n
A (a ij )
a
a
a
m2
mn
m1
m Zeilen und n Spalten, "Matrix vom Typ (m,n)".
Im Folgenden seien die Matrixelemente aij reelle oder komplexe Zahlen sowie m und n
endlich.
T
Die zu A transponierte Matrix A entsteht durch Vertauschung der Zeilen und Spalten von A ,
T
ihre Matrixelemente lauten also a ij a ji .
Die Matrix A mit den Elementen a ki heißt adjungiert zur Matrix A mit den (komplexen)
Elementen aik.
Eine Matrix A mit komplexen Elementen heißt hermitesch oder selbstadjungiert, wenn
T
T
A : A A A . Dann stimmen die transponierte und die komplex konjugierte Matrix
T
überein: A A .
4.1
Rechenregeln für Matrizen
Gleichheit von zwei Matrizen:
A = B , wenn aij = bij für alle i, j.
Summe zweier Matrizen gleichen Typs:
C A B mit
cij = aij + bij für alle i, j.
Die Addition von Matrizen ist kommutativ: A B B A .
Multiplikation einer Matrix mit einer Zahl: A ( a ij ) (alle Elemente mit multiplizieren).
Multiplikation von Matrizen
Sei A (a ij ) eine Matrix vom Typ (mA,nA) und B (b ij ) eine Matrix vom Typ (mB,nB). Nur
wenn A genauso viele Spalten wie B Zeilen hat (also n A m B ist), ist das Produkt beider
Matrizen definiert, wobei gilt
C A B (c ij ) , c ij a ik b kj (Summenkonvention, ausführlich c ij
nA mB
a
k 1
ik
b kj ).
6
Also werden paarweise die Elemente der i-ten Zeile von A mit den Elementen der k-ten Spalte
von B multipliziert und addiert: Das Matrixelement cij ist das Skalarprodukt aus dem i-ten
Zeilenvektor von A und dem j-ten Spaltenvektor von B . Die Produktmatrix hat mA Zeilen und
nB Spalten.
Beachte: Aus A B 0 und A 0 (also nicht die Nullmatrix) kann nicht B 0 gefolgert
werden. Analog folgt aus A B A C und A 0 nicht B C .
Im Gegensatz zur Addition ist die Multiplikation von Matrizen i.a. nicht kommutativ!
■
3
3
A 1 2 , B , A B 3 8 (11) , B A 1 2
11 Matrix
4
4
3 6
4 8
22 Matrix
Für nichtquadratische Matrizen verhindert oft schon die Bedingung n A m B die
Vertauschbarkeit. Dennoch kommutieren auch quadratische Matrizen i.a. nicht:
■
1 2
5 6
, B
A
3 4
7 8
5 14 6 16 19 22
5 18 10 24 23 34
, B A
A B
15 28 18 32 43 50
7 24 14 32 31 46
Da multiplikativ vertauschbare Matrizen etwas Besonderes sind, definiert man:
Def.: Die Matrizen A und B heißen vertauschbar (kommutierend), wenn
[A, B] : A B B A 0
gilt.
7
4.2
Determinante einer quadratischen n n - Matrix
Die Determinante der quadratischen Matrix A ist die Zahl
Def.: Det ( A ) A
a11
a12
a 21
a 22 a 2 n
a 1n
: a 11 A11 a12 A12 a 13 A13 / ... a1n A1n
a n1 a n 2 a nn
mit den Unterdeterminanten Aik . Aik ist die Determinante n-1 ten Grades, die aus der
Determinante von A durch Streichung ihrer i-ten Zeile und ihrer k-ten Spalte entsteht. Diese
rekursive Definition führt eine Determinante n-ten Grades auf eine Summe von
Determinanten n-1 -ten Grades zurück. Falls n = 1, ist die Determinante das Matrixelement
selbst.
Die mit dem Faktor (-1)i+k versehene Unterdeterminante des Elements aik wird als Adjunkte
(algebraisches Komplement) Aik des Elements aik bezeichnet. Der Ausdruck in der Definition
für Det ( A ) ist ein Beispiel für den Laplace´schen Entwicklungssatz:
n
n
i 1
i 1
Det ( A ) a ik A ik a ki A ki ,
also die Entwicklung einer Determinante nach den Elementen einer Zeile oder einer Spalte.
■
Nach dieser Definition berechnet sich z.B. die Determinante einer quadratischen
Matrix 3-ten Grades wie folgt
a 11
a 12
a 13
a 21
a 22
a 23 a 11
a 31
a 32
a 33
a 22
a 23
a 32
a 33
a 12
a 21 a 23
a 31
a 33
a 13
a 21
a 22
a 31
a 32
a 11 (a 22 a 33 a 23a 32 ) a 12 (a 21a 33 a 23a 31 ) a 13 (a 21a 32 a 22 a 31 ) .
Merkregel für Determinaten 2. Grades: Produkt der Hauptdiagonalelemente minus Produkt
der Nebendiagonalelemente.
8
Der Ausdruck für die Determinante 3. Grades lässt sich leicht über die Sarrus´sche Regel
merken:
a 11
a 21
a 31
a 12
a 22
a 32
a 13
a 23
a 33
a 11 a 12
a 21 a 22
a 31 a 32
Terme mit positivem Vorzeichen entstehen aus dem wie oben erweiterten Schema durch
Produktbildung aus den aik entlang und parallel zur Hauptdiagonalen (durchgezogene Linien).
Terme mit negativem Vorzeichen entstehen analog entlang und parallel zur Nebendiagonalen
(unterbrochene Linien).
Die Sarrus´sche Merkregel gilt nur für Determinanten 3. Grades!
4.3
Quadratische Matrizen ( n n )
Quadratische Matrizen werden transponiert, indem man ihre Elemente an der Hauptdiagonale
T
spiegelt. Eine quadratische Matrix A heißt symmetrisch, wenn A A bzw. a ij a ji .
Die quadratische Matrix A heißt regulär, wenn ihre Determinante verschieden von Null ist,
Det ( A ) 0 . Die Regularität von A ist notwendig und hinreichend für die Existenz der zu
1
1
A inversen Matrix A , für die A A I gilt. Die zu A inverse Matrix wird aus
A11
1 A 21
1
A
Det A
A n1
A12 A1n
A 22 A 2 n
A n 2 A nn
T
berechnet, wobei Aik die zum Element aik gehörige Adjunkte ist, also die mit dem Faktor
(-1) i+k versehene Unterdeterminante.
1
1
Beachte ( A B) 1 B A .
T
1
Die reguläre quadratische Matrix A heißt orthogonal, wenn A A gilt.
9
T
1
Die komplexe quadratische Matrix A heißt unitär, wenn A A gilt.
2
n
Potenzen A ,..., A können nur für quadratische Matrizen A gebildet werden. Dabei gilt
A : A A (a ik a kj ) , usw. sowie e :
A
2
n 0
■
1 n
A
n!
1
1
d At
e A e A t , denn e A t : ( A t ) k 1 A t A A t 2 ... .
2
dt
k 0 k!
Also ist
d At
1
e : k A ( A t ) k 1 A
dt
k 0 k!
k 1
1
1
( A t ) k 1 A ( A t ) n A e A t .
k 1 n
( k 1)!
n 0 n!
Bemerkung: Vorlesung Lineare Algebra
In der linearen Algebra werden Vektoren ohne Bezug auf ein Koordinatensystem ad hoc als
(geordnetes) n-Tupel von Zahlen definiert, für die bestimmte Rechenregeln gelten.
a1
Definition: a
a
n
n
a e
i
i
n
oder C n , d.h., die Zahlen ai sind reell oder komplex.
i 1
Die Vektoren werden als Elemente eines linearen Vektorraums aufgefasst. Wiederholen Sie
die Axiome des linearen Vektorraums, insbesondere die Begriffe lineare Unabhängigkeit von
Vektoren und Basis.
10