Lindner
Werbung

197
12.1.2 Drehschwinger
Eine zum Feder-Ma se-Sy tem analoge Anordnung für Dreh 'chwingungen erhält man,
wenn ein Rotation körper, der um eine fe te Ach e drehbar i t, dem rückstellenden Drehmoment einer Schneckenfeder au ge etzt i t.
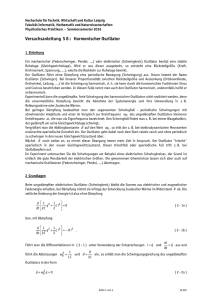
Büd 12.2: Dreh chwinger
Bei dem in Bild 12.2 gezeigten System wird die Kreisscheibe nach einer Drehung um die
vorgegebene Drehachse durch die verdrillte Feder beschleunigt. So wie die Rückstellkraft
der Feder proportional zur Auslenkung der Mas e war, ist auch hier bei kleinen Drehungen
das Rückstellmoment häufig proportional zum Drehwinkel d. h., e gilt
IM =
- Dy,
I
RücksteDmoment einer Schneekenfeder
(12.5)
D Direktions- oder Richtmoment (eot pricht der Federkon tanten)
. rn/ rad
Drehmoment und Winkel in (12.5) sind vorzeichenbehaftete Betrag größen . Bei einer Drehung um einen po itiven Winkel (1/1 > 0) ist da entsprechende Drehmoment recht drehend. Die Winkeibe chleunigung, die der Drehkörper erfährt, ergibt sich au Gleichung
(8.10)
[D] =
Winkelbeschleunigung beim
Drehschwinger
(12.6)
(12.6) entspricht formal Gleichung (12.1) für den linearen Feder-Mas e-O zillator.
Damit folgt die Auslenkung 1/1 ebenfalI einem Sinus-Verlauf wie er in (11.17) bereit
quantitativ angegeben wurde. Die Kennkrei frequenz des Dreh chwinger erhält man sofort durch Vergleich:
~
'
WO
= -J
Kennkreisfrequenz des Drehschwingers
Entsprechend i t die Periodendauer de Oszillator
Ta =2n
fJ
Vv
Periodendauer des Drebschwingers
(12.7)
198
12 Dynamik schwingender Körper
Die beim Feder-Ma se-Sy tern festgestellten Abhängigkeiten gelten auch hier, nur daß an
die Stelle der Ma e da Massenträgheit moment und an die Stelle der Federkonstante das
Richtmoment tritt.
Die in (12.5) formulierte Proportionalität zwischen Rückstellmoment und Auslenkung
(Drehwinkel) i t näherung weise auch bei Körpern gegeben, die unter dem Einfluß der
Schwerkraft in Schwingung geraten. Beispiele für solche physischen Pendel oder Schwerependel ind ein aufgehängter Stab, ein hängendes Brett oder eine Schaukel.
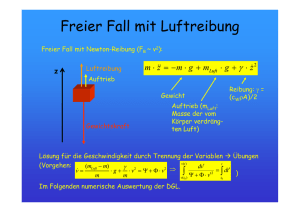
Bild 12.3: Phy i ches Pendel
Bei dem in Bild 12.3 kizzierten Pendel i t der Schwerpunkt S um einen Abstand I gegcnüb r d m DrehJager 0 verschoben. Eine Auslenkung des Pendels aus seiner Gleichgewicht lage hat ein Drehmoment bezüglich des Drehlagers der Größe M = -mgl sin 1jf
zur Ige. Für kleine Au lenkungen läßt sich die Sinusfunktion durch den Winkel ersetzen:
. in 1/1 ~ 1/1. Damit gilt näherung weise M ~ -mgll.jJ, d. h. aber, das Direktionsmoment D
lautet in die ern Fall
I D = mgl I
Direktionsmoment beim Schwerependel
(12.9)
inge 'etzt in Gleichung (12.8) ergibt dies für die Periodendauer des Schwerependels
To
=2nJ mglJ
Periodendauer des Schwerependels
(12.10)
in ond rfall eine Schwerependel liegt vor, wenn die Masse des Oszillators in seinem
chwerpunkt JokaJi iert ist. Dann gilt für das Massenträgheitsmoment J = ml 2 und für die
Periodendauer
Periodendauer beim mathematischen Pendel
(12.11)
ie hängt au chUeßlich vom Ab tand der Ma se vom Drehlager und der Fallbeschleunigung ab.
Drehschwingungen eignen ich ehr gut zur experimentellen Bestimmung von Massenträgheit moment n. Eine Möglichkeit be teht darin, den Körper, dessen Trägheitsmoment
12.1
199
Bild 12.4: Ermittlung des Trägheitsmoment
einer Riemen cheibe
Bild 12.5: Ermittlung de Trägheitsmoments
eine MOlOranker .
ermittelt werden oll, so mit einer Aufhängung zu versehen daß er möglich t frei um eine
Drehachse chwingen kann, die zu der gewün chten Achse parallel i t (Bild 12.4).
Die Ver uch drehachse oUte dabei 0 gewählt werden, daß eine vernünftige Me ung der
Perioden dauer ennöglicht wird. Mit Hilfe von (12.10) erhält man das Trägheit moment
bezüglich der Drehach e im Experiment und kann darau unter Verwendung des Satzes
von Steiner (8.18) das Trägheit moment für jede beliebige parallele Drehachse berechnen.
Eine andere Möglichkeit der Ermittlung von J beruht darauf, den Körper an einem langen
Stahldraht aufzuhängen (Bild 12.5). Nach einer kleinen Verdrehung führt er dann Tor ion schwingungen mit der Perioden dauer T aus, für welche (12.8) gilt.
Bei Kenntnis des Direktionsmoments D 1ieße sich darau da Trägheitsmoment bezüglich
der gewählten Drehachse berechnen. Umgekehrt ist es natürlich möglich, D mit Hilfe eine
geeigneten bekannten Trägheitsmoments experimentell zu be timmen.
Beispiele:
1. Für den in Bild 12.4 gezeigten rotationssymmetri chen Dretmörper mit der Mas e 800 g on da
Massenträgheit moment bezüglich der Symmetrieachse be timmt werden. Hierzu wird der Drehkörper im Ab tand I = 60 mm vom Schwerpunkt frei drehbar gelagert. Die Me' ung der Periodendauer
ergibt TO = 0, 60 .
Aus (12.10) folgt
T 2 mgl
]=---
4rr 2
2
0,60
2·0,
800 kg . 9, 81 m· 0, 060 m
4n 2 . 2
=4
29. 10- 3 ko . m2
' I : )
Mit Gleichung (8.18) ergibt sich darau für die Symmetrieach e
JS
=J
- ml 2 = (4.29· 10-3 - O. 800 . 0,0602 ) kg . m2
= 1,41 . 10- 3 kg· m2
2. Welche Länge muß ein Fadenpendel haben, damit eine halbe Schwingung genau 1 . dauert?
.
gTJ
9.81 m .4,0 2
Aus Glelchung (12.11) folgt l = --2 =
2
= 0, 994 m. Die Länge de Sekunden4n
4· 1t .
pendels beträgt al 0 rund 1 m.
200
12.1.
12
Dynamik schwingender Körper
En rgiebilanz
Sow hl be im harmoni ehen 0 zillator mit linearer Auslenkung als auch bei einem Oszillator, der Dre h chwingungen ausführt, gilt der Energieerhaltungssatz. Darauf wurde auch
, c hon in h. chnitt 6.2 hingewie en. Wie verhalten sich nun die beiden Energieanteile währnd eines chwingungs.lyklu? Betrachten wir als Beispiel das Feder-Masse-System. Für
die kinetis h Energie gilt wegen (11.7)
Ekin
=
~lI1v2 = ~m LvWQ eos(W()t + ({Ja)] 2
ie pote ntielle Energie folgt au Gleichung (6.4), wobei die Auslenkung s durch y zu
crsct/.cn ist
• pOL
=
2I
C
2
I
J [A .
]2
= 2C
y 'm (wo t + ({Ja) ·
Mit I/ilf' von c = mW6 erhält man
I m [..'wo .m(WO f
EP(11 = 2
+ ({Ja )] 2
E
wt
Bild 12.6: Zeitverlauf der Energie bei einer
harmoni ehen Schwingung
P t ntidl >und kin tL he nerg ie unterscheiden sich demnach nur durch ihr Zeitverhalten.
iod g nau um ein n Winkel von 90° pha enver choben. In Bild 12.6 sind E pot und
l: 111 in bhängigk it \ n der Zeit t aufgetragen, wobei als Anfangsbedingung für t = 0
111 Imale u. lenku ng, d. h. Ekin = 0 gewählt wurde.
Z i ' ' h n pot nti Her und kineti cher Energie findet ein periodi eher Wechsel statt, wobei
di umm. " ie 'ich 1 icht dur h dditi n der bei den Gleichungen nachprüfen läßt, immer
gl I h r ß bl ibt. Die hwingungen der beiden Energieformen erfolgen jedoch doppelt
chn
i di chwingung der Ma e.
n\
1.2
Dämpfun
Die u le nkung, amplitude n ei ne einmal ange toBenen Pendels werden im Laufe der Zeit
t >li II iner. i ' da Pe ndel , tchenbfe ibt. Die Ur achen ind die Reibung an der Aufhännng. der uft\ ider tand und d ie Energieabg abe an das Ge tell , das tet ein wenig mit\ ' gl \ ird.
ha lte n die c h~ ingungen einer Blattfeder, die fe t in einen Schraubstock
ge pannt i l, i le ekund n lang an. In einer Fa ung au Gummi kommt ie schon nach
cni' n -h\ inoun 'b ' wegu ngen zur Ruhe. eine Folge der tarken Dämpfung.
12.2 Dämpfung
201
Bild 12.7: Gedämpfte Schwingung
Die Dämpfung läßt sich bei keiner Schwingung ganz vermeiden, 0 daß Schwingungen im
Prinzip stet so verlaufen, wie Bild 12.7 zeigt. In vielen Fällen liegt ein Zeitverhalten für
die Auslenkung vor, das durch ein Produkt aus einer Sinusfunktion und einer Exponentialfunktion beschrieben werden kann:
Auslenkungsfunktion eines gedämpften
Oszillators (bei geschwindigkeits( 12. 12)
proportionaler Reibung)
8 ist der Abklingkoeffizient, sein Kehrwert die Abklingzeit r.
Zusanunenhangzwischen
Abklingkoeffizient und Abklingzeit
[8]
= 11s
(12.13)
(je Sekunde)
Die Kreisfrequenz CVd im Argument der Sinusfunktion nennt man auch die Eigenkrei frequenz de gedämpften Oszillators, da durch sie der periodi che Teil der zu ammenge etzten Funktion charakterisiert ist. Der Kehrwert von Wd ist ent prechend die Periodendauer
Td. Die Exponentialfunktion in (12.12) beschreibt die durch die Dämpfung hervorgerufene
Abnahme der Anfangsamplitude )10. Nach der Abklingzeit r hat diese nur noch den Wert
)lo/e.
Die gesamte Auslenkungsfunktion ist zwar wegen de Dämpfung gliede nicht mehr periodisch, da die Bedingung yet + Td) = yet) nicht mehr erfüllt i t, jedoch gilt für da
Verhältni von zwei Auslenkungen im zeitlichen Ab tand von Td:
__
y_(t_)_
y(t + Td)
= eOTd = con
t.
Auslenkungsverhältnis bei der
gedämpften Schwingung
(12. 14)
Das Verhältnis zweier im Abstand einer Periodendauer Td aufeinanderfolgender Auslenkungen ist konstant.
202
12 Dynamik chwingender Körper
Den natürlichen Logarithmus des Quotienten in (12.14) bezeichnet man al logarithmisches Dekrement:
A
= In
y(t)
y(t + Td)
= In (0
e Td ) = 8Td
Logarithmisches
Dekrement
(12.15)
Für die gewählte Schwingung funktion ist A gleich dem Produkt au Abklingkoeffizient
und Periodendauer. Durch die Bildung der Verhältnis e von z. B. aufeinanderfolgenden
Maxirna einer gemes enen Auslenkungsfunktion läßt sich die Gültigkeit de Dämpfungge etze überprüfen und mit Hilfe der Periodendauer Td der Abklingkoeffizient be timmen.
Genau 0 wie im Fall des freien harmonischen Oszillators erlaubt die Au lenkungsfunktion Rück chIüs e auf die am Schwingungsvorgang beteiligten Kräfte vor allem die für
die Dämpfung maßgebliche Kraft zu ziehen. Betrachten wir wie oben ein Feder-Mas eSy tern, 0 muß nur die Beschleunigung mit der Ma se multipliziert werden, um die Kraftre ultierende zu erhalten. Die Berechnung erfolgt in zwei Schritten. Zunäch t gilt für die
Ge. chwindigkeit der chwingenden Masse:
Iv = y = -~y +
YOO - !I COS(Wd
+ 'PO)
I
Gesch windigkeit eines
gedämpften Oszillators
(12.16)
Nach nochmaliger Ableitung erhält man die Beschleunigung:
Nach Multiplikation mit der Masse m lautet schließlich die Bewegungsgleichung
Bewegungsgleichung eines FederMasse-Oszillators mit geschwindig- (12.17)
keitsproportionaler Dämpfung
Die Bewegung gleichung enthält zwei ver chiedene Kräfte. Zum einen tritt eine Kraft auf,
die wie beim harmoni chen 0 zillator proportional zur Auslenkung y ist. Hierbei handelt es
-ich offen, ichtlich um die Rückstellkraft der Feder. Entsprechend muß auch der Koeffizient
m (0 2 + (V~)mit der Federkonstanten c übereinstimmen, woraus sich für die Eigenkreisfrequenz (Ud folgende Beziehung ergibt:
Eigenkreisfrequenz des gedämpften (12.18)
harmonischen Oszillators
Hierbei wurde berücksichtigt, daß der Quotient c / m dem Quadrat der Kenn-(Eigen-) Kreisfrequenz de freien harmonischen Oszillators entspricht.
Die Eigenkrei frequenz de gedämpften Oszillators ist geringer als die des freien Oszillator . Der Grenzfall 8 = WO heißt aperiodischer Grenzfall. Die Masse chwingt dann nicht
mehr. ondern bewegt ich nach einer Auslenkung langsam (kriechend) in die Ausgangslage zurück.
12.3
Erzwungene Schwingungen
203
Die zweite Kraft in (12.17) be chreibt den Einfluß der Dämpfung. Sie ist proportional zur
momentanen Ge chwindigkeit de chwingenden Körpers und entspricht einer Reibungskraft, wie ie bei der Bewegung in vi kosen Medien auftritt (Abschnitt 10.2). Bestimmt
wird die e Kraft durch da. doppelte Produkt au Ma e und Abklingkoeffizient, das auch
al Dämpfung koeffizient bezeichnet wird:
Dämpfungskoeffizient
[b]
= kgj
(12.19)
(Kilogramm je Sekunde)
Mit Hilfe der Federkon tanten und des Dämpfungskoeffizienten sowie nach Ersatz von a
und v durch die ent prechenden Ableitungen lautet schließlich (12.] 7) kurzgefaßt
Imy + by +
cy
=0
I
Schwingungsdifferentialgleichung eines
harmonischen Oszillators mit geschwindigkeitsproportionaler Dämpfung
(12.20)
Mathemati ch ent pricht (12.20) einer homogenen Differentialgleichung 2. Ordnung mit
konstanten Koeffizienten.
Beispiele:
1. Die Anfangsau lenkung eine Feder-Mas e-Pendel hat icb nach 4 Schwingungen halbiert. Wie
groß i t die Au lenkung nach weiteren 4 Schwingungen? Welcher allgemeine Zusammenhang be teht
zwischen der "Halbwert zeit" TI/2 für die Au lenkung und dem Abkljngkoeffizienten?
Wegen (12.14) hat ich die Au lenkung nach weiteren 4 Schwingungen noch einmal halbiert, d. h.,
sie beträgt jetzt nur noch 1/4 der ursprünglichen Au lenkung. Außerdem gilt
und damit TI/2
Y(O)) = 2 = eOT1 / 2
y(Tl/2
In 2
= 8.
2. WeIcher Anteil der 0 zillatorenergie wurde bei Halbierung der Au lenkung in Wärme umgewandelt?
1
Die Energie de 0 zillator zu Beginn i t potentielle Energie E = CY5 mit der Anfang auslenkung
Yo. Bei Halbierung von YO i t die verbliebene Energie nur noch 1/4 der Anfang energie, d. h., 3/4 der
Energie wurde in Wänne umgewandelt.
12.3
Erzwungene Schwingungen
Bei den bisherigen Betrachtungen über 0 zillatoren wurden nur solche Fälle behandelt, in
denen der 0 zillator kurzzeitig einer äußeren Kraft ausgesetzt und der Schwingungsverlauf
ausschließlich durch die Eigenfrequenz des 0 zillators bestimmt war. In der Praxis bedeutsamer ind aber die Fälle, in denen der Oszillator unter der Einwirkung einer längerandauemden periodi chen Kraft steht. Man denke z. B. an die Karo serieteile eine Fahrzeugs,
die entweder durch Motor chwingungen oder Fahrtkräfte zum Mitschwingen angeregt werden. In diesen Fällen bilden Erreger und Oszillator eine Einheit, die owohl durch die Eigen chaften des Oszillator als auch durch die der äußeren Kraft bestimmt i t. Je nachdem,
welche Anwendung im Vordergrund teht, wird beim Mit chwingen des Oszillator darauf
geachtet, daß die es entweder unterdrückt wird oder aber möglichst effektiv erfolgt. Bei
12 Dynamik chwingender Körper
204
einem piezoelektrischen Schwinger z. B. wird man ver uchen eine möglich t große Au lenkungs amplitude zu erzielen, während bei den obenerwähnten Karo eriet il n eine hohe
Dämpfung wünschenswert ist. Natürlich zeigen die in der Praxi auftretenden Erregerkräfte
i. allg. ein kompliziertes Zeitverhalten, was die exakte Analy e von Schwingung vorgängen
erschwert. Trotzdem lassen sich die wesentlichen Gesichtspunkte herau teIlen, wenn man
das Verhalten eines einfachen Schwingers, wie er in Abschnitt 12.2 be chrieben wurde,
unter der Einwirkung einer äußeren Kraft mit sinusförmigem Zeitverlauf betrachtet.
Zur mathematischen Behandlung muß hierzu die rechte Seite von (12.20) durch einen Term
ergänzt werden, der eben diese Kraft berücksichtigt
Imji + bj> +
cy
=
ft sin"",!
I
Bewegungsgleichung eines gedämpften
harmonischen Oszillators bei Einwirkung
einer sinusförmigen Kraft
(12.21)
Fit die Amplitude der erregenden Kraft, WB die Kreisfrequenz (Erregerkrei frequenz) der
Kraft.
Mathemati ch erfolgt nun die Lösung des Problems in der Weise, daß eine Auslenkungsfunktion für den Oszillator angesetzt wird, die sowohl dem Fall ft = 0, d. h. für eine
verschwindende äußere Kraft, als auch dem Sinusverlauf Genüge leistet. Der Fall ft = 0
ent pricht dem Schwingungsproblem des freien gedämpften Oszillators, d. h., die Auslenkungsfunktion ist die von Gleichung (12.12). Einen Lösungsansatz für ft > 0 erhält man
au der Überlegung, daß zumindest nach einer länge ren Zeitdauer der 0 zillator mit der
gleichen Frequenz wie der Erreger schwingt, aber evtl. eine Phasenwinkelverschiebung gegenüber dem Erreger aufweist. Die gesamte Schwingungsfunktion des Oszillators ist also
eine Überlagerung au (12.12) und einer sinusförmigen Funktion. Gleichung (12.12) spielt
aber nur während de Einschwingvorgangs eine wesentliche Rolle, da, bedingt durch den
exponentiellen Dämpfung faktor, dieser Schwingungsanteil allmählich verschwindet. Für
die stationäre Schwingung des Oszillators bleibt also nur noch der Sinusanteil übrig:
Stationäre Auslenkungsfunktion eines
Oszillators bei Sinuserregung
(12.22)
Sowohl die Amplitude y als auch der Nullphasenwinkel epo sind abhängig von der Erregerfrequenz WE, wie sich leicht durch Einsetzen von (12.22) in (12.21) zeigen läßt. Nach
Bildung der ent prechenden Ableitungen erhält man:
-mw~y in ep + bWEY co ep + cy sin ep
= ft sin WBt,
mit
({J
= WEt + ({JO
Die drei Summanden auf der linken Seite repräsentieren Kräfte, wobei der erste Summand
die Trägheit kraft, der zweite die Dämpjungskraft und der dritte die RücksteLLkrajt des
Feder-Ma e-Sy tems bedeuten.
Bei kleinen Erregerfrequenzen dominiert rue Rückstellkraft, bei großen die Trägheitskraft.
Eine pezielle Sitiuation ist dann gegeben, wenn die Erregerfrequenz gleich der Eigenfrequenz de ungedämpften Oszillators ist, d. h., wenn WE = wo. In diesem Fall heben sich
12.3
Erzwungene chwingungen
205
Trägheit kraft und Rück teIlkraft gegen eitig auf, und e bleibt nur noch die Dämpfung kraft übrig.
Durch Koeffizienten ergleich der linken und der rechten Seite obiger Gleichung erhält man
für die Amplitude y . owie den Nul1pha enwinkel q;o:
~
F
a) cy ~ F, d. h .. y ~ - owie q;o ~ 0 für WB «WO
c
Erreger und 0 zillator chwingen gleichpha ig; die Amplitude entspricht einer Auslenkung. wie ie auch bei einer tati chen Kraft vorhanden wäre.
, , "
A.
,..
b) bWOY"
F"'dh"
. q;o = -rt f ür WB = WO
. . , )' = -FOWle
.
bWO
2
Hier be timmt der Dämpfung koeffizient b die Amplitude. Bei verschwindender Dämpfung geht die Amp1itude gegen unendlich! Die Phasenverschiebung beträgt -90°.
~
A
c) mw~ ~
At
F
F d. h., Y ~ --.,
mWE
owie q;o ~
-TI:
für WE
»
WO
Die Amplitude wird mit zunehmender Erregerfrequenz immer kleiner; gleichzeitig nähert ich die Phasenverschiebung dem maximalen Wert von -180°.
Natürlich la en ich Amplitude und Nullphasenwinkel auch für den allgemeinen Fall ermitteln. Ein einfacher Lö ung an atz ergibt sich unter Verwendung eines Zeigerdiagramms.
Da alle Terme in obiger Gleichung bi auf eine Pha enver chiebung die gleiche Zeitabhängigkeit aufwei en,la en ie ich in ein gemein arne Zeigerdiagramm eintragen (Bild
12.8). Die Dämpfung kraft i t um 90° (cos-Funktion!), die Trägheitskraft um 180° gegenüber der Rück teilkraft pha enver choben.
A
F
,..
mco F.2 y'"
ey
Bild 12.8: Zeigerdar tellung der erzwungenen Schwingung: die
Zeiger reprä entieren die Kräfte, die am 0 zillator angreifen, eingetragen ind jeweils die Beträge.
Nach Anwendung der Regeln für Vektoraddition erhält man für " bzw. q;o:
Frequenzgang der
Auslenkungsamplitude
q;O
= arctan m. (2
2)
wE-W
O
Frequenzgang des
Nullphasenwinkels
(12.23)
(12.24)
Der Verlauf der Au lenkung amplitude und des Nullpha enwinkels in Abhängigkeit von
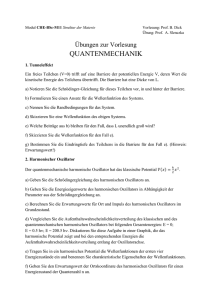
der Erregerfrequenz i t in Bild 12.9 wiedergegeben.
206
12 Dynamik chwingender Körper
"
Ymax
kleine Dämpfung
. ..... ............. . ... . .. .
t
"
Y
,..
Ysial
t
({JO
o
kleine Dämpfung
n
2
I
I
I
I
I
I
I
-------------- ----~-------------------
Bild 12.9: Auslenkungsamplitude und Nullphasenwinkel einer erzwungenen Schwingung a]s Funktion der Krei frequenz für verschiedene Dämpfungen
Die oben nur näherungsweise bestimmte Abhängigkeit der beiden Schwingungsgrößen von
der Erregerfrequenz wird bestätigt. Die AusJenkungsamplitude steigt, von einem festen
Wert au gehend, zunächst mit der Frequenz an, um dann nach Überschreiten eines Maximums ra ch abzufallen. Den Fall, daß die Amplitude einen Maximalwert erreicht, nennt
man auch Auslenkungsresonanz. Der Oszillator ist dann ein Resonator. Die Frequenz,
bei der Re onanz eintritt, ergibt ich aus der Forderung, daß der Nenner in (12.23) minimal
wird. Nach Bildung der ersten Ableitung des Nenners nach WE und Nullsetzen erhält man:
Kreisfrequenz bei
Auslenkungsresonanz
(12.25)
Die Resonanzfrequenz (Kreisfrequenz) ist kleiner als die Eigenfrequenz des ungedämpften, aber auch des gedämpften Oszillators. Mit zunehmender Dämpfung verschiebt sie sich
zu immer kleineren Werten. Im Fall sehr schwacher Dämpfung und großer Masse des 0 zillator stimmt sie mit der Kennkreisfrequenz Wo überein. Gleichzeitig verbreitert sich mit
zunehmender Dämpfung der Kurvenverlauf, Höhe und Schärfe der Resonanzlinie nehmen
ab.
Der Frequenzgang de Nullphasenwinkels zeigt, daß bei kleinen Frequenzen Erreger und
o zmator gleichpha ig schwingen, ({Ja bei WE = wo den Wert -90 0 einnimmt und chließlich bei hohen Frequenzen Erreger und Oszillator gegenphasig schwingen. Im Resonanzfall i t die Verschiebung etwas kleiner als -90 0 • Mit zunehmender Dämpfung verflacht der
Verlauf de Nullpha enwinkels. Die S-Kurvenform ist dann weniger ausgeprägt.
Wenn man von Re onanz bei mechanischen Systemen spricht, ist meistens die Auslenkungsresonanz gemeint. Man sollte aber immer daran denken, daß auch andere physikaliche Größen wie z. B. die Auslenkungsgeschwindigkeit Resonanzverhalten aufweisen. Die
12._
hwinou
e ' noen
e
Erzwungen
207
Fr quen7. b i der ein 1a imum d~r Ge chwindigkeit amplitude auftritt, i t aber eine ander al di
e onanzfr quenz für du: u~lenkung (e gilt ja = wy). Ähnliche Au agen
gelten auch bel anderen chwingung~s), ternen. wie etwa elektromagneti ehen Schwingkrci. en. Ili r wird L.vvi:chen trom- und pannung re onanz unter chieden.
v
Mit l1iH der BC.IIehungen über AUl,lenkungsamplitudc und Nullphasenwinkel läßt ich auch eine
Au .. agc über die \ m Erreger zu erbringende Lei~lung treffen. Multipliziert man die Erregerkraft
mit d r Ge hwindigkeit de 0 11lla(O~. 0 erhält man
P
Da! Pr
= Fv =
[: O)EY in WC'
~(wEI
+ qJo)
ukt 3U d n beiden inu unkti nen läßt ich in eine Summe umwandeln,
1 •
P = , F WE)' [
10
lwEl + !pO) -
0
daß gilt
in fPo]
D r erste ummand in der Klammer be HZ( eine inu fönnige Zeit bhängigkeit. während der zweite ummand \ n der Zeit unabhängig i t. Integriert man die Lei tung über eine Periodendauer, 0
\e hv. ind 1 der Beitrag de e~ten Term . und e bleibt nur noch der zweite übrig:
Für die mittler Lei tung gilt daher
1
Pm
A
= -2FWEY
m~
Mit (12.23 und (1 ...... 24) ergibt ichchließlieh
Frequenzgang der mittleren
Lei tung
(12.26)
Die mittlere Lei, tung i t aw. hließlich durch die Dämpfung de 0 zjllat r be timmt. Bei \erchwindender Dämpfung. d. h. b = 0, \\ ird auch Pm zu null. au gen mmen den Fall WE = WOTrägh II - und Rü k. teilkraft erf rdem '[\ 'ar auch ntrieb lei tung. jedoch kehrt die. wieder in den
Erreger I.urüc . E handelt ich hi rbel um eine Blindle' tung. ur der Dämpfung 'term erfordert
, irklei tung.
In Bild L.IO i t der Frequenzgang der mittleren Lei tung grafi eh \! ·iedergegeben. Bei kiemen Frequenzen un
h\\acher Dämpfung wä -h t Pm zunäch. t quadrati h mit der requen7. um nach Überchreiten eine, taximum umgekehrt prop rtionallum Quadrat der Frequenz wieder abzufallen. Die
Frequen/, bei der Pm maximal \\ in! (Leistun re onanz . ent pn ht der Eigenfrequenz de ungedämpften 0. lillat ...... und i t damIt el\! a~ gr"ßer al die requenz für mplitudenre onanz. peziell
bei einer nregung mit der Eigenfr quenz. ergibt ,-ich für die mittlere L i tung
1 [:2
Pm = - 2 b
1
lru imale mittler Lei tung
12 Dynamik chwingender Körper
208
t
kleine Dämpfung
große Dämpfung
Bild 12.10: Mittlere Wirklei tung eines gedämpften Oszillators als Funktion der Erregerkreisfreq uenz
Bei vorgegebener Kraftamplitude und verschwindendem Dämpfungskoeffizienten geht Pm gegen
unendlich wa zunächst widersprüchlich erscheint. Das Ergebnis wird verständlich, wenn man die
Reibung arbeit betrachtet, die wegen der immer größer werdenden Auslenkungsamplitude ebenfalls
unendlich groß werden muß.
Mit Hilfe der Systemparameter Masse m, Dämpfungskoeffizient b und Federkonstante ci t
da Schwingungsverhalten des zugrunde gelegten Modelloszillators vollständig bestimmt.
Durch Variation die er drei Größen wird eine Vielzahl ganz unterschiedlicher Schwingung formen ermöglicht.
Beispiele:
I. Wie groß i t die Au lenkungsamplitude eines Resonators im Resonanzfall?
etzt man an Stelle der Erregerkreisfrequenz in (12.23) die Resonanzkreisfrequenz (12.25) und verwendet für b den Au druck (12.19), so ist die Auslenkung amplitude
"
ft
y=--;===
28mJW
Wenn darilber hinau
"
y~
d. h"
F
28mwO
6- 82
8« wo ( chwache Dämpfung), gilt die Näherung
--
bwO
Yent pricht dann der Amplitude bei der Kennkreisfrequenz des Oszillators.
2. Wie groß muß die Dämpfung eine 0 zillators ein, damit er gerade keine Auslenkungsresonanz
mehr be itzt?
Au (12.25) folgt, daß WR genau dann null wird, wenn WB - 28 2
= 0, d. h., 8 = ~.
3. Ein 0 zillator mit der Ma se 1,0 kg und der Federsteife 100 N/m wird bei der Kennkrei frequenz
betrieben. Die Au lenkung amplitude beträgt 10 cm, die Wirkleistung des Erregers 1,0 W. Wie groß
ind di Kraftamplitude und der AbkJingkoeffizient?
FÜr.V gilt bei WE
= Wo
ft
Y = -b . In (12.27) eingesetzt, erhält man Pm
~
frequenz i t
100 N
I, kg· m
°
= 10 1/
1
A
= -FYcvO. Die Kennkreis2
209
Darau folgt
2 Pm _ 2 . l ! W · _ 2 0
F --Wo
0, 10 m · 10
'
A
-
.A
Ent prechend gilt dann
b
f;
8 = 2m = 2mS'WO
2. 0 N ·
= 2. 1. 0 kg . 0, 10 m . 10 = 1,01 /
12.4 Gekoppelte 0 ziJlatoren
Die Schwingungen einer ange toßenen Glocke, einer gezupften Saite oder einer durch
Flugzeug chan angeregten Fen ter cheibe haben eines gemein am: sie sind das Ergebnis
der Kopplung vieler 0 zillatoren. Anzahl und Eigenschaften dieser Oszillatoren sind letzten Ende durch die atomare oder molekulare Struktur de betrachteten Körpers bestimmt,
was natürlich bedeutet daß eine enorme Zahl von Teilchen betrachtet werden müßte. Für
die mei ten prakti ehen Fälle gibt e jedoch Modellvor teHungen, mit denen die Schwingungseigen chaften eine o1chen Vielteilehensystems hinreichend gen au be chrieben werden können, ohne daß eine o1che mikroskopische Sichtweise vonnöten wäre. Natürlich
gibt es auch weniger komplizierte Fälle von realen Teilchensystemen, die sich mit verhältnismäßig einfachen Mitteln berechnen la en und nützlich zum Verständnis ausgedehnter
Systeme ind. Drei Bei piele für einfache Systeme aus gekoppelten Oszillatoren sind in
Bild 12.11 wiedergegeben.
'l'/////////.
Bild 12.11: Bei piele für gekoppelte 0 zillatoren
Die we entliehe Bedeutung der Kopplung von Oszillatoren beruht darauf, daß sowohl ein
Austausch von Impuls als auch von Energie zwischen den Oszil1atoren möglich wird.
12.4.1
Systeme aus einzelnen Oszillatoren
Die Au wirkungen auf da Schwingungsverhalten der einzelnen 0 zillatoren las en ich
am Bei piel zweier durch eine gemein ame Kopplungsfeder miteinander verbundenen identischer Feder-Ma e-Schwinger ohne Dämpfung demonstrieren (Bild 12.12).
In Bild 12.13 i t die Au lenkung der beiden Massen in Abhängigkeit von der Zeit t dargestellt, wobei die Ma e J zum Zeitpunkt t = 0 die Au lenkung Xl = X und die Ma e
2 die Au lenkung X 2 = 0 hatte. Die Kopplungsfeder wurde dabei 0 gewählt, daß ihre
Federkon tante kleiner al die der Einzelfedern war (c' < C, d. h. " chwache"' Kopplung).
Beide Mas en führen modulierte Sinus chwingungen durch, wie wir ie bereit im Zusammenhang mit Schwebunge1l kennengelernt hatten. Dabei ergeben ich in periodi chen Abständen Schwingung zu tände, bei denen die Auslenkungsamplituden maximal bzw. null