Vorlesung 4
Werbung

SWS-Kongruenzsatz.
SWS-Kongruenzsatz. Es seien A, B, C und A′ , B ′ , C ′ Punkte des R2 ,
s.d. weder A, B, C noch A′ , B ′ , C ′ auf einer Geraden liegen. Dann gilt: es
gibt eine Isometrie I , mit A 7→ A′ , B 7→ B ′ , C 7→ C ′ , genau dann wenn
d(A, B) = d(A′ , B ′ ), d(A, C ) = d(A′ , C ′ ) und hBAC = hB ′ A′ C ′ . Ferner
gilt: wenn diese Isometrie existiert, ist sie eindeutig.
Beweis. In Richtung “=⇒” ist die Aussage fast offensichtlich: Wenn eine
Isometrie mit A 7→ A′ , B 7→ B ′ , C 7→ C ′ existiert, gilt
d(A, B) = d(A′ , B ′ ), d(A, C ) = d(A′ , C ′ ). Wie wir in Vorl. 1 bewiesen
haben (siehe Folgerung 3 dort), erhält die Isometrie das Skalarprodukt,
also hA − B, A − C i = hA′ − B ′ , A′ − C ′ i. Ausserdem
′
′
|A − B| = d(A, B) = |A′ − B ′ | und|A − C | = d(A,
C ) = |A − C |. Dann
hA−B,A−C i
ist das Winkelmaß hBAC = arccos |A−B|·|A−C
| gleich dem Winkelmaß
′ ′ ′ ′ hA −B ,A −C i
hB ′ A′ C ′ = arccos |A
′ −B ′ |·|A′ −C ′ | .
Wir beweisen jetzt in “⇐=”–Richtung. Nach dem Kosinussatz gilt
|BC |2 = |AC |2 + |AB|2 − 2|AC ||AB| cos(hBAC ). Also, wenn
|AC | = |A′ C ′ |, |AB| = |A′ B ′ | ( ⇐⇒ d(A, B) = d(A′ , B ′ ),
d(A, C ) = d(A′ , C ′ )) und hBAC = hB ′ A′ C ′ , muss auch |BC | = |B ′ C ′ |
gelten. Die Aussage folgt dann aus dem SSS-Kongruenzsatz.
Kongruenzsatz für Winkel
Kongruenzsatz für Winkel. Zwei nicht-triviale Winkel sind genau dann
kongruent wenn die Winkelmaße gleich sind. Ferner gilt: es existieren
genau zwei Kongruenzen, die einen nicht-trivialen Winkel in einen
gleichweiten Winkel überführen.
Beweis. Beweis in Richtung “=⇒” ist wie beim Kongruenzsatz oben:
Isometrie erhält Skalarprodukt; Winkelmaß ist nur mit Hilfe von
Skalarprodukt definiert; also erhalten die Isometrien auch Winkelmaß.
Wir zeigen jetzt die “⇐=”–Richtung. Die Winkel seien gegeben durch
A, v , u bzw- A′ , v ′ , u ′ . Die Vektoren v , u sind bis auf einen positiven
Faktor definiert; deswegen können wir oBdA annehmen, dass
|u| = |v | = |u ′ | = |v ′ | = 1. Dann existiert nach SWS-Kongruenzsatz eine
Isometrie mit A 7→ A′ , A + v 7→ A′ + v ′ und A + u 7→ A′ + u ′ . Diese
Abbildung bildet die Halbgerade HA,v auf HA′ ,v ′ und die Halbgerade HA,u
auf HA′ ,u′ ab; deswegen bildet sie den Winkel huAv auf hu ′ A′ v ′ ab.
Analog zeigt man die Existenz einer Abbildung, die die Richtungsvektoren
umtauscht und die Halbgerade HA,v auf HA′ ,u′ und die Halbgerade HA,u
auf HA′ ,v ′ abbildet.
Wir haben also die Existenz von 2 solchen Isometrien gezeigt. Um
zu zeigen, dass es genau zwei sind, bemerken wir, dass es genau
zwei Punkte auf dem Winkel huAv gibt, die den Abstand 1 zu A
haben, nämlich A + v und A + u. Diese Punkte müssen auf Punkte
des Winkels hu ′ A′ v ′ abgebildet werden, die Abstand 1 zu A′ haben,
also auf die Punkte A′ + v ′ und A′ + u ′ , weil A auf A′ abgebildet
werden soll. Dann hat die gesuchte Isometrie die Eigenschaft
A 7→ A, A + u 7→ A′ + u ′ , A + v 7→ A′ + v ′ , oder die Eigenschaft
A 7→ A, A + u 7→ A′ + v ′ , A + v 7→ A′ + u ′ ; in beiden Fällen ist
eine solche Isometrie eindeutig nach SSS-Kongruenzsatz.
WSW-Kongruenzsatz.
WSW-Kongruenzsatz. Es seien A, B, C und A′ , B ′ , C ′ Punkte des R2 ,
s.d. weder A, B, C noch A′ , B ′ , C ′ auf einer Geraden liegen. Dann gilt: es
gibt eine Isometrie I mit A 7→ A′ , B 7→ B ′ , C 7→ C ′ , genau dann wenn
d(A, B) = d(A′ , B ′ ), hBAC = hB ′ A′ C ′ und hABC = hA′ B ′ C ′ . Ferner
gilt: wenn diese Isometrie existiert, ist sie eindeutig.
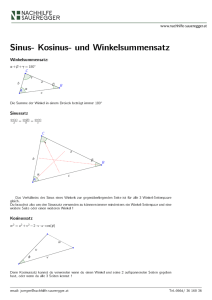
Zuerst Vorarbeit: Sinussatz.
Sinussatz. Sei ∆ABC ein Dreieck mit den Seitenlängen a = |BC |,
b = |AC | und c = |AB| sowie den Winkelgrößen α = hBAC , β = hABC
und γ = hACB.Dann gilt
sin(β)
sin(γ)
sin(α)
=
=
.
a
b
c
Bemerkung. Schulgeometrischer Beweis ist wie folgt: Man benutzt die
Formel Flächeninhalt(∆ABC ) = 21 bc sin(α) = 12 ac sin(β). Wenn man dies
mit abc dividiert, bekommt man
sin(α)
= sin(β)
a
b .
Um diesen Beweis zu benutzen, brauchen wir aber den Begriff
Flächeninhalt; und es ist nicht-trivial diesen sauber einzuführen.
Außerdem haben wir selbstverständlich auch nicht die Formel
Flächeninhalt(∆ABC ) = 12 bc sin(α). Wir werden deswegen einen
alternativen Beweis lernen; im √
Beweis benutzen wir nur die Eigenschaften
der Funktionen cos und sin = 1 − cos2 .
Beweis. Nach dem Kosinussatz gilt für den Winkel in der Ecke A
−2bc cos(α) = a2 − (b 2 + c 2 ) und daher
4b 2 c 2 (cos(α))2 = (−a2 + b 2 + c 2 )2 .
Analog gilt 4a2 c 2 (cos(β))2 = (a2 − b 2 + c 2 )2 .
Da a, b, sin(α), sin(β) > 0 zeigt dies sin(α)
=
a
sin(γ)
Rollen von B und C liefert sin(α)
=
a
c
sin(β)
b .
Vertauschung der
Beweis von WSW-Kongruenzsatz
WSW-Kongruenzsatz. Es seien A, B, C und A′ , B ′ , C ′ Punkte des R2 , s.d. weder A, B, C noch
A′ , B ′ , C ′ auf einer Geraden liegen. Dann gilt: es gibt eine Isometrie I mit A 7→ A′ , B 7→ B ′ ,
C 7→ C ′ , genau dann wenn d(A, B) = d(A′ , B ′ ), hBAC = hB ′ A′ C ′ und hABC = hA′ B ′ C ′ . Ferner
gilt: wenn diese Isometrie existiert, ist sie eindeutig.
Wir bezeichnen die Seiten/Winkel des Dreiecks ∆ABC wie auf dem Bild. Die entsprechenden Objekte von ∆A′ B ′ C ′ werden mit
a′ , b ′ , c ′ , α′ , β ′ , γ ′ bezeichnet.
Da α + β + γ = α′ + β ′ + γ ′ = 180◦ , folgt aus dem Winkelsummensatz
für ein Dreieck γ = γ ′ . Wegen Sinussatz gilt:
sin(γ)
sin(γ ′ )
sin(α)
sin(α′ )
=
=
und
.
a
c
a′
c′
Da c = c ′ , α = α′ und γ = γ ′ , folgt aus dieser Formel a = a′ , also
BC = B ′ C ′ . Nach SWS-Kongruenzsatz gibt es dann (genau) eine
Isometrie mit A 7→ A′ , B 7→ B ′ und C 7→ C ′ ,
WSS-Kongruenzsatz
WSS-Kongruenzsatz. Zwei Dreiecke, die in zwei Seitenlängen und in
jenem Winkel übereinstimmen, der der längeren Seite gegenüberliegt,
sind kongruent.
D.h., wenn für zwei Punktetripel A, B, C und A′ , B ′ , C ′ gilt:
◮
weder A, B, C noch A′ , B ′ , C ′ liegen auf einer Geraden,
◮
d(A, C ) = d(A′ , C ′ ), d(A, B) = d(A′ , B ′ ) und hABC = hA′ B ′ C ′ ,
◮
und außerdem |AC | ≥ |AB| und |AC | ≥ |BC |, dann existiert eine
Isometrie, mit A 7→ A′ , B 7→ B ′ , C 7→ C ′ .
Beweis. Nach Kosinussatz gilt
a2 + c 2 − 2accos(β) − b 2 = 0.
Wir betrachten diese Gleichung als eine quadratische Gleichung auf die
Unbekannte a (d.h., wir betrachten die Grössen, die für beide Dreiecke
gleich sind, als bekannt) und zeigen, dass diese Gleichung genau eine
positive Lösung hat. Das wird bedeuten, dass die Daten (c, b, β) die
Seite a eindeutig bestimmen — daraus folgt, dass c = c ′ und deswegen
können wir SSS−Satz anwenden.
a2 + c 2 − 2accos(β) − b 2 = 0.
Wir betrachten diese Gleichung als eine quadratische Gleichung auf die
Unbekannte a (d.h., wir betrachten die Grössen, die für beide Dreiecke
gleich sind, als bekannt).
Die Diskriminante der Gleichung ist D = c 2 cos(β)2 − (c 2 − b 2 ) und ist
| {z } | {z }
≤0
>0
positiv. Dann gibt es zwei Möglichkeiten für a:
c cos(β)+
p
c 2 cos(β)2 − (c 2 − b 2 ) und c cos(β)−
p
c 2 cos(β)2 − (c 2 − b 2 ).
Da die zweite “Möglichkeit”
nicht positiv ist, muss
s
a = c cos(β) + c 2 cos(β)2 − (c 2 − b 2 ), also bestimmen die Daten
| {z }
≤0
b, c, β die Seite a eindeutig.
Dann folgt aus den Voraussetzungen des Satzes die Bedingung
d(C , B) = d(C ′ , B ′ ). Dann existiert nach SSS-Satz eine eindeutige
Isometrie, mit A 7→ A′ , B 7→ B ′ , C 7→ C ′ . Diese Isometrie erfüllt auch die
Bedingung hABC = hA′ B ′ C ′ .
Punktspiegelung (Zentralsymmetrie)
Sei Z ∈ R2 (oder Rn ). Die Punktspiegelung
bzgl. Z ist die Abbildung PZ : R2 → R2 gegeben durch PZ (x) = Z + (Z − x) = 2Z − x
(d.h., der Punkt Z liegt auf der Strecke mit
Endpunkten x und PZ (x) und ist der MittelBild von Wikipedia
punkt von dieser).
Beobachtung. Punktspiegelung ist eine Isometrie.
Ich gebe zwei Beweise: einer ist linear-algebraisch, in dem anderen
benutze ich den SWS-Kongruenzsatz.
Linear-algebraischer Beweis.
Wir betrachten A, B; wir müssen zeigen, dass
d(A, B) = d(2Z − A, 2Z − B). Wir rechnen es aus:
d(2Z − A, 2Z − B) = |2Z − A − (2Z − B)| = |B − A| = d(A, B).
Beweis mit Hilfe von SWS. Wir setzen A′ = PZ (A) und B ′ = PZ (B).
Dann sind die Winkel hAZB und hA′ ZB ′ gleich als Gegenwinkel (Beweis,
dass Gegenwinkel gleich sind, ist Hausaufgabe). Außerdem sind
|AZ | = |A′ Z | und |ZB| = |ZB ′ |. Dann existiert nach SWS-Kongruenzsatz
eine Isometrie mit A 7→ A′ , B 7→ B ′ und Z 7→ Z ′ . Dann ist |AB| = |A′ B ′ |.
Anwendung von Punktsymmetrien zum Lösen von
schwierigen Schulaufgaben
Gesuchte Gerade G
Aufgabe. Gegeben seien ein Punkt
A, eine Gerade L und ein Kreis K .
Konstruiere (mit Zirkel und Lineal)
eine Gerade G , so dass die Strecke
mit Endpunkten Schnittpunkt der
”
Gerade G mit K“, Schnittpunkt der
”
Gerade G mit L“, A als Mittelpunkt
hat.
K
A
L
Lösung
Aufgabe. Gegeben seien einGesuchte Gerade G
Punkt A, eine Gerade L
und ein Kreis K . Konstruiere (mit Zirkel und Lineal) eine Gerade G , so dass
die Strecke mit Endpunkten
Schnittpunkt der Gerade G
”
mit K“, Schnittpunkt der
”
Gerade G mit L“, A als Mittelpunkt hat.
K
A
L
Man konstruiere eine Gerade, die zu L punktsymmetrisch bzgl. A ist
(man nehme zwei Punkte von L, konstruiere davon die Punktspiegelung
bzgl. A mit Zirkel/Lineal, und ziehe die Gerade durch diese Punkte.) Für
jeden Schnittpunkt dieser Gerade mit dem Kreis ist die Gerade durch den
Punkt und A die gesuchte Gerade G (also gibt es zwei Lösungen, eine
Lösung oder keine Lösungen.)
Gesuchte Gerade G
K
A-Zentralsymmetrische Gerade zu L
A
L
Noch eine gesuchte Gerade G
Verkettung von Punktspiegelungen.
Lemma 12. Die Verkettung von 2 Punktspiegelungen (bzg.
möglicherweise verschiedenen Punkten) ist eine Translation. Die
Verkettung von Punktspiegelung und Translation und von Translation
und Punktspiegelung ist eine Puntkspiegelung.
Beweis. Zuerst rechnen wir aus, welche Isometrie wir bekommen wenn
wir I (x) = Ox + b und I ′ (x) = O ′ x + b ′ verketten:
′
′
+b.
I ◦ I ′ (x) = O(O ′ x + b ′ ) + b = OO
|{z} x + Ob
| {z }
Õ∈O2
b̃
Wir sehen, dass die zur Verkettung von Isometrien gehörige Matrix das
Produkt der zu den Isometrien gehörigen Matrizen ist.
Die
Darstellung
einer
APunktspiegelung in der Form Ox + b
haben wir letztes mal ausgerechnet:
PZ(x) = −x
+ 2Z
= −1 −1 xx12 + 2Z .
Bild von Wikipedia
Wenn wir zwei Punktspiegelungen verketten,
bekommen
wir eine Isometrie mit der zugehörigen Matrix −1 −1 −1 −1 = 1 1 ;
dann ist die Verkettung von zwei Punktspiegelungen eine Abbildung der
Form x 7→ Id(x) + v = x + v , d.h., eine Parallelverschiebung.
′
′
′
′
′
I ◦ I (x) = O(O x + b ) + b = OO x + Ob + b .
|{z}
| {z }
Õ∈O2
b̃
Wir sehen, dass die zur Verkettung von Isometrien gehörige Matrix das Produkt der zu den Isometrien
gehörigen Matrizen ist.
Wenn wir eine Punktspiegelung und eine Translation oder eine
Translation und eine Punktspiegelung verketten, bekommen wir eine
Isometrie mit der Matrix O = Id · (−Id) = −Id oder
O = (−Id) · Id = −Id; also ist die Verkettung von Punktspiegelung und
Translation eine Abbildung der Form x 7→ −x + v ist, und das ist eine
Punktspiegelung bzgl. Z = 21 v .
Anwendung in einer schulgeometrischen Aufgabe
A1
Gegeben
sind
die
Punkte
M1 , ..., M2n+1 ∈ R2 . Man konstruiere
mit Zirkel/Lineal ein (2n+1)-Eck
A1 , ..., A2n+1 , s.d. die Mittelpunkte
von Ai Ai+1 die Punkte Mi sind.
M1
Gegeben: M1--M5
A2
M5
A5
M2
Finden: A1--A5
M4
A3
A4
M3
Wenn n = 1, also wenn das 2n+1Eck ein Dreieck ist, ist die Aufgabe
leicht: man kann relativ einfach beweisen, dass alle Dreiecke ∆M1 M2 M3 ,
∆M3 A1 M1 , ∆M2 M1 A2 , ∆A3 M3 M2 kongruent sind; dann kann man (wenn
A1
A3
∆M1 M2 M3 gegeben ist) auch die anderen Konstruieren.
Für das 5-Eck ist die Aufgabe nicht mehr so einfach; probieren Sie zuerst
sie selber zu lösen.
A2
M1
M2
M3
Eine Lösung mit Hilfe von (Verkettung von)
Punktspiegelungen.
A1
Gegeben sind die Punkte M1 , ..., M2n+1 ∈ R2 .
Man konstruiere mit Zirkel/Lineal ein (2n+1)-Eck
A1 , ..., A2n+1 s.d. die Mittelpunkte von Ai Ai+1 die
Punkte Mi sind.
M1
Gegeben: M1--M5
A2
M5
A5
M2
Finden: A1--A5
M4
A3
A4
M3
Wir betrachten die Verkettung PM2n+1 ◦ · · · ◦ PM1 : R2 → R2 . Das ist eine
Punktspiegelung:
PM2n+1 ◦ · · · ◦ PM3 ◦
PM2 ◦ PM1
| {z }
Eine Translation Tv
= PM2n+1 ◦ · · · ◦ PM3 ◦ Tv
| {z }
= ... = Punktspiegelun
Punktspiegelung
Überlegen wir jetzt was diese Punktspiegelung PM2n+1 ◦ · · · ◦ PM1 mit dem
(noch nicht bekannten) Punkt A1 tut:
PM1 (A1 ) = A2 , PM2 ◦ PM1 (A1 ) = PM2 (A2 ) = A3 ,... ,
PM2n+1 ◦ · · · ◦ PM1 (A1 ) = A1 . Also ist der (gesuchte) Punkt A1 ein
Fixpunkt von PM2n+1 ◦ · · · ◦ PM1 . Da PM2n+1 ◦ · · · ◦ PM1 eine
Punktspiegelung PZ ist, hat sie genau einen Fixpunkt, und zwar den
Punkt Z (wenn −x + 2Z = x ist, ist x = Z .) Wie findet man diesen
Fixpunkt mit Zirkel/Lineal?
C
Man nehme einen beliebigen
Punkte C und konstruiere davon
die PM1 −Spiegelung (C ′ ) mit Zirkel/Lineal.
M1
M5
C’
M2
M4
M3
Dann
konstruiere
man
M1
−Spiegelung
von
die
P
M
2
M5
C’
(C ′ ), (bezeichnet mit C ′′ );
M2
C ′′ = PM2 ◦ PM1 (C ) u.s.w. Nach
M4
insgesamt 2n + 1−Schritten
C’’
bekommen wir den Punkt
M3
PM2n+1 ◦ · · · ◦ PM1 (C )
Dann ist der Mittelpunkt der Strecke zwischen C und
PM2n+1 ◦ · · · ◦ PM1 (C ) genau der gesuchte Punkt Z = A1 .
Nachdem wir A1 konstruiert haben, ist die Restkonstruktion einfach.
Bemerkung. Ein solches 2n + 1−Eck A1 ...A2n+1 ist eindeutig (bei
gegebenen M1 , ..., M2n+1 ). Das 2n + 1−Eck A1 ...A2n+1 existiert immer,
wenn wir erlauben, dass die Seiten des 2n + 1-Eckes einander schneiden
und nicht konvexe 2n + 1-Ecke als Lösungen annehmen (also, wenn
2n + 1-Eck für uns eine 2n + 1-Folge von Punkten ist).
Lot.
Def. Sei T ⊆ R2 (oder Rn ) und A ∈ R2 . Der Lotpunkt von A auf T ist
der Punkt B ∈ T , s.d. der Abstand d(A, B) nicht grösser als der Abstand
d(A, B ′ ) für alle B ′ ∈ T ist:
d(A, B) = inf{d(A, B ′ ) | B ′ ∈ T }.
Die Lotgerade von A (bzgl. T ) ist die Gerade durch A und
B = Lotpunkt(A).
Im allgemeinen Fall ist der Lotpunkt
und die Lotgerade nicht eindeutig:
T
B2
Auf dem Bild sehen wir, dass A zwei
Lotpunkte bzgl. T hat, B1 und B2 .
Wenn außerdem A ∈ T , ist A =
A
Lotpunkt(A) und jede Gerade durch
B1
A ist eine Lotgerade.
Def. Sei T ⊆ R2 (oder Rn ) und A ∈ R2 . Der Lotpunkt von A auf T ist der Punkt B ∈ T , s.d. der
Abstand d(A, B) nicht grösser als der Abstand d(A, B ′ ) für alle B ′ ∈ T ist:
′
′
d(A, B) = inf{d(A, B ) | B ∈ T }.
Lotpunkt muss auch nicht existieren:
Bsp. Wir betrachten den (offenen)
A
Ball B1 (~0) = {B ∈ R2 | d(~0, B) <
1} und A 6∈ B1 (~0), z.B. A = 11 .
B
B’
Dann gibt es keinen Lotpunkt von A
auf B1 (~0), weil es für jeden Punkt
B ∈ B1 (~0) noch die Punkte der
Strecke BA gibt, die in B1 (~0) liegen.
Diese sind näher zu A als B.
Wenn wir statt dem offenen Ball
B1 (~0), den abgeschlossenen Ball
A
B
0
B1 (~0) = {B ∈ R2 | d(~0, B)≤1}
betrachten, existiert ein (und in
diesem Bsp. genau ein) Lotpunkt,
nämlich der Schnittpunkt der Strecke
~0A mit dem Kreis {B ∈ R2 |
d(~0, B)=1}.
Existenz (mind.) eines Lotpunkts für eine abgeschlossene
Menge
Def. (Analysis; Wiederholung) Eine Teilmenge T ⊆ R2 (oder Rn ) ist
k→∞
abgeschlossen, wenn für jede konvergente Folge x1 , ..., xk , ... −→ x mit
xi ∈ T gilt, dass x ∈ T .
Konvergenz kann man hier als Konvergenz bzgl. der Abstandsfunktion
k→∞
k→∞
verstehen (d.h., x1 , ..., xk , ... −→ x g.d.w. d(x, xk ) −→ 0);
oder komponentenweise verstehen, d.h., (d.h.,
k→∞
k→∞
x1
y1
,...,
xk
yk
k→∞ x , ... −→
g.d.w. xk −→ x und yk −→ y ); diese zwei Definitionen von
Konvergenz sind äquivalent.
y
Existenz (mind.) eines Lotpunkts für eine abgeschlossene
Menge
Def. (Analysis; Wiederholung) Eine Teilmenge T ⊆ R2 (oder Rn ) ist abgeschlossen, wenn für jede
k→∞
konvergente Folge x1 , ..., xk , ... −→ x mit xi ∈ T gilt, dass x ∈ T .
Bsp. Abgeschlossener Ball
B1 (~0) = {B ∈ R2 | d(~0, B)≤1}
ist abgeschlossen: wenn wir eine konvergente Folge
k→∞ x x1
x
,..., k , ... −→
haben, s.d. alle Elemente davon, also xykk , in
y1
yk
y
B1 (~0) liegen, dann liegt auch der Grenzwert in B1 (~0). In der Tat, wenn
k→∞
k→∞
xk −→ x und yk −→ y , dann gilt für jede stetige Funktion f (x, y ), dass
p
k→∞
f (xk , yk ) −→ f (x, y ). Die Funktion f (x, y ) = x 2 + y 2 = d( yx , ~0) ist
p
p
offensichtlich stetig, also x 2 + y 2 = limk→∞ xk2 + yk2 . Da alle
p
xk
∈ B1 (~0), ist xk2 + yk2 ≤ 1. Deswegen ist
pyk
p
x 2 + y 2 = limk→∞ x 2 + y 2 ≤ 1 und x ∈ B1 (~0).
k
k
y
Bsp. Offener Ball
B1 (~0) = {B ∈ R2 | d(~0, B)<1}
ist nicht abgeschlossen: wir können eine konvergente Folge
k→∞ x x1
x
konstruieren, s.d. alle Elemente davon, also
,..., k , ... −→
y1
y
yk
x1
~
, in B1 (0) liegen, aber der Grenzwert yx kein Punkt von B1 (~0) ist.
y1
1
Wir wählen xk = 1 − k ∈ B1 (~0). Der Grenzwert davon ist
1
0
yk
0
6∈ B1 (~0).
0
(1,0)
Ist T abgeschlossen, so existiert (mind.) ein Lot
Lemma 13. Die Teilmenge T ⊆ R2 sei abgeschlossen und A ∈ R2 . Dann
gilt: es existiert mind. ein Lotpunkt von A auf T .
Im Beweis werden wir die folgenden zwei Aussagen aus der Analyis benutzen:
(1) Die Schnittmenge von zwei abgeschlossenen Mengen ist abgeschlossen. (Beweis dieser Aussage ist
einfach und folgt sofort aus der Definition.)
(2) Eine beschränkte Folge in Rn hat immer eine konvergente Teilfolge. (Ist nicht so trivial)
Beweis. OBdA ist A 6∈ T , sonst ist A = Lotpunkt(A). Wir nehmen
B̃ ∈ T , setzen r = d(A, B̃) und betrachten T ′ := T ∩ Br (A). T ′ ist
abgeschlossen nach der ersten Aussage oben; T ′ 6= ∅, weil
B̃ ∈ T ∩ Br (A).
Jetzt betrachten wir die Zahl d := inf{d(A, B ′ ) | B ′ ∈ T ′ }. Die Menge
{d(A, B ′ ) | B ′ ∈ T ′ } ist von unten durch 0 beschränkt, also d ≥ 0. Da
inf{d(A, B ′ ) | B ′ ∈ T ′ } die exakte untere Grenze der Menge
{d(A, B ′ ) | B ′ ∈ T ′ } ist, gibt es eine Folge
k→∞
d1 , ..., dk , ... ∈ {d(A, B ′ ) | B ′ ∈ T ′ }, s.d. dk −→ d; also gibt es eine
k→∞
Folge B1 , ..., Bk , ... ∈ T ′ , s.d. d(A, Bk ) −→ d. Diese Folge hat eine
Sei B der konvergente Teilfolge nach der zweiten Aussageoben.
Grenzpunkt dieser Teilfolge. Da die Funktion f yx = d A, yx eine
stetige Funktion ist, ist f (B) = lim f (Bk ) = lim dk = d, also
d(A, B) = d
.
Wir haben: B ∈ T ′ , weil T ′ abgeschlossen ist und
d(A, B) = d ≤ d(A, B ′ ) für alle B ′ ∈ T ′ . Dann gilt auch
d(A, B) = d ≤ d(A, B ′ ) für alle B ′ ∈ T , weil sonst B ′ ∈ T ′ \ T
den Abstand > r = d(A, B̃) ≥ d zu A hat.
Lot auf einer Gerade
Wir zeigen zuerst, dass eine Gerade LA,v abgeschlossen ist.
Wir betrachten eine konvergente Folge von Punkten der Gerade
k→∞
x1 = A + t1 v , x2 = A + t2 v , x3 = A + t3 v , ..., xk = A + tk v , ... −→ x.
Dann konvergiert auch die Folge t1 , t2 , ..., tk , ..., weil sie eine
Cauchy-Folge ist, denn
d(A + tk v , A + tm v ) ≤ d(A + tk v , x) + d(x, A + tm v ),
{z
} |
{z
} |
{z
}
|
|tk −tm |·|v |
k,m→∞
k→∞
−→ 0
m→∞
−→ 0
und deswegen |tk − tm | −→ 0.
Dann existiert ein Grenzwert t = limk→∞ tk . Da die Abbildung
t 7→ A + tv stetig ist, konvergiert A + tk v gegen A + tv , also liegt der
Grenzwert auf der Geraden.
Also existiert für einen beliebigen Punkt B mind. ein Lotpunkt von B auf
LA,v .
Aus LA wissen wir, dass der Lotpunkt von B auf LA,v
eindeutig ist
Hier ist die Formel für den Lotpunkt auf der Gerade LA,v :
C = Lotpunkt(B) = A +
B
1
hB − A, v iv .
|v |2
Der Koeffizient t = |v1|2 hB − A, v i ist
so gewählt, dass hC − B, v i = 0: in
der Tat, hC − B, v i = hA − B +
1
|v |2 hB − A, v iv , v i = hA − B, v i −
1
|v |2 hA − B, v ihv , v i = 0.
C
A
Für jeden anderen Punkt C + t ′ v der Gerade (t ′ 6= 0) gilt dann
′
2
′
′
d(B, C + t v ) = hB − C − t v , B − C − t v i
hB − C , v i = 0
′ 2
2
=
hB − C , B − C i + (t ) hv , v i > d(B, C ) ,
also ist der Punkt C tatsächlich (der einzige) Punkt der Geraden LA,v ,
der zum Punkt B am nächsten ist.
Bemerkung. Wir sehen, dass B − C zu v orthogonal ist.
Spiegelung bzgl. Gerade
Wir betrachten eine Gerade L = LA,v . Die Spiegelung bzgl. L ist eine
Abbildung SL : R2 → R2 gegeben durch die folgende Regel:
x
Zuerst konstruieren wir zu dem Punkt
L x den Lotpunkt(x) (auf L). Dann
Lotpunkt(x)
S(x)
SL (x) = x + 2(Lotpunkt(x) − x)
= 2Lotpunkt(x) − x.
(Man beachte die Ähnlichkeit mit der
Punktspiegelung: PZ (x) = 2Z − x).
Unter Berücksichtigung der Formel Lotpunkt(x) = A +
bekommen wir SL (x) = 2A + 2 |v1|2 hx − A, v iv − x.
1
|v |2 hx
− A, v iv ,
SL (x) = 2A + 2 |v1|2 hx − A, v iv − x.
Lemma 14. Spiegelung ist eine Isometrie.
Beweis. Beweis mit Kongruenzsätzen ist eine Hausaufgabe. Ich gebe
jetzt einen linear-algebraischen Beweis.
d(SL (x), SL (y )) = d(2A+2
s
=
1
1
hx −A, v iv −x, 2A+2 2 hy −A, v iv −y ) =
|v |2
|v |
1
1
= 2 2 hx − A, v iv − x − 2 2 hy − A, v iv + y =
|v |
|v |
h2
s
1
1
hx − y , v iv + y − x, 2 2 hx − y , v iv + y − xi =
2
|v |
|v |
4
hx − y , v i2
hx − y , v i2
−
4
+ hx − y , x − y i = d(x, y ).
|v |2
|v |2
Anwendung von Spiegelsymmetrien zum Lösen von
schwierigen Schulaufgaben
Aufgabe. Gegeben seien zwei Punkte A, B und eine Gerade L. Man konstruiere (mit Zirkel und Lineal) einen
Punkt X ∈ L, s.d. die Winkel zwischen AX und der Geraden und zwischen BX und der Geraden gleich
sind.
B
A
X
L
Lösung
Aufgabe. Gegeben seien zwei
Punkte A, B und eine Gerade
L. Man konstruiere (mit Zirkel und Lineal) einen Punkt
X ∈ L, s.d. die Winkel zwischen AX und der Geraden
und zwischen BX und der
Geraden gleich sind.
B
A
X
L
Man konstruiere den Punkt B ′ , der zu B bzgl. L spiegelsymmetrisch ist.
Der Schnittpunkt der Gerade durch A, B mit L ist der gesuchte Punkt X ,
weil die Spiegelung von ∆XTB das Dreieck ∆XTB ′ ist, und deswegen alle
auf dem Bild markierten Winkel gleich sind.
B
A
T
L
X
B’