Lineare Algebra und Geometrie 1 - BFH
Werbung

BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
Lineare Algebra und Geometrie 1
4 ECTS
Inhalt
Themen
Seite
Vektorgeometrie2
I
II
I.1 Das Vektorprodukt
2
I.2 Anwendungen
4
Formelsammlung
Papula1
Lineare Algebra
II.1 Lineare Gleichungssysteme, der Gauss-Algorithmus
7
VII 3.1 - 3.2, 3.4
II.2 Matrizen und Determinanten
10
VII 1.1 - 1.5, 2.1 - 2.6
II.3 Die Cramersche Regel
15
VII 3.5
II.4 Homogene lineare Gleichungssysteme, lineare (Un-)Abhängigkeit 16
III
Komplexe Zahlen
III.1 Definition, Rechenoperationen mit komplexen Zahlen
18
VIII 1 - 4
III.2 Polynome, komplexe Nullstellen
21
VIII 4
III.3 Eulerformel, Exponentialform
25
VIII 1, 8
IV.1 Erweiterung der reellen Funktionen
27
VIII 3-5, 7
IV.2 Komplexe Funktionen einer reellen Variablen, Ortskurven
28
VIII 6
IV.3 Abbildungen der komplexen Ebene, insbesondere Inversion
32
VIII 6.3
IV
Komplexwertige Funktionen
1
Lothar Papula: Mathematische Formelsammlung für Ingenieure und Naturwissenschaftler,
Viewegs Fachbücher der Technik (wird auch in den andern Mathematikmoduln verwendet)
2
Bemerkung: Vektorgeometrie bis und mit Skalarprodukt sowie Trigonometrie gehören zum
Berufsmaturstoff und werden deshalb hier vorausgesetzt; eine Aufarbeitung dieses Stoffes wird in der
fakultativen Übungsserie „Repetition Berufsmaturstoff Mathematik“ angeboten (siehe
https://prof.hti.bfh.ch/baw2 ).
1
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
I
Vektorgeometrie
I.1
Das Vektorprodukt
HS 2011 / baw2
Wenn wir in unserem dreidimensionalen Anschauungsraum ein festes rechtwinkliges Koordinatensystem einführen, können wir jeden Punkt x in bekannter Weise durch ein Zahlentripel (x1, x2, x3)
charakterisieren. Wir schreiben dabei einfach x = (x1, x2, x3). Statt des Punktes x können wir aber
⎡ x1 ⎤
r
auch seinen Ortsvektor x = ox = ⎢ x 2 ⎥ betrachten, was noch nützlicher ist, weil für Vektoren
⎢x ⎥
⎣ 3⎦
Rechenoperationen definiert sind. Es ist aber wichtig, Punkte und Vektoren zu unterscheiden, weil
sich sonst leicht Missverständnisse ergeben. Wir wollen uns nicht auf den dreidimensionalen Raum
n
beschränken und definieren daher den n-dimensionalen reellen Raum R als Menge aller n-Tupel
r ⎡ x1 ⎤
x = (x1,…, xn) von reellen Zahlen, und wir nennen auch hier x = ⎢ : ⎥ den Ortsvektor von x. Während
⎢x n ⎥
⎣ ⎦
n
das Ihnen bereits bekannte Skalarprodukt von zwei Vektoren auch im R definiert ist (Summe der
Produkte entsprechender Komponenten), ist das in diesem Kapitel einzuführende Vektorprodukt eine
Spezialität des 3-dimendionalen Raumes, also nur im Fall n = 3 definiert, und zwar wie folgt:
r
⎧⎪Betrag : ar b sin( Zwischenwi nkel)
r r
a × b = Vektor ⎨
r
r
⎪⎩Richtung : senkrecht auf a und b in Rechtsschraubenricht ung
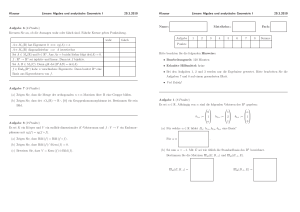
Zur Erläuterung: Man denke sich die beiden Vektoren im gleichen Punkt befestigt und betrachte das
r r
von ihnen aufgespannte Parallelogramm. Der Betrag von a × b kann dann als Flächeninhalt dieses
Parallelogramms gedeutet werden. Eine senkrecht in diese Fläche eingeschraubte Rechtsschraube
r r
r
bewegt sich in der Richtung von a × b , wenn man sie so dreht, dass der (mitgedrehte) Vektor a sich
r
b annähert.
r r
a ×b
Vektorprodukt
r
b'
ϕ
r
b
r
b sin(ϕ)
r
a
Wenn einer der Vektoren der Nullvektor ist, oder wenn einer ein Vielfaches des andern ist (kurz: wenn
r r r
die beiden linear abhängig sind), dann (und nur dann) ist a × b = 0 . Man kann also mit dem
2
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
Vektorprodukt testen, ob zwei Vektoren linear abhängig sind, ähnlich wie man mit dem Skalarprodukt
testet, ob sie senkrecht zueinander sind.
Um mit dem Vektorprodukt arbeiten zu können, brauchen wir Rechenregeln, vor allem eine Formel,
die gestattet, das Vektorprodukt aus den Komponenten der Faktoren zu berechnen. Zunächst ist aus
der Definition unmittelbar ersichtlich, dass
r r
r r
a ×b = −b × a
(Antikommutativgesetz)
r r r
Das Vektorprodukt ist also nicht kommutativ! Ebenso gilt das Assoziativgesetz nicht, d.h. a × (b × c )
r r r
und (a × b ) × c sind i. A. nicht gleich. Können Sie ein Beispiel angeben? Bezüglich Streckung mit
Skalarfaktoren λ verhält sich das Vektorprodukt jedoch verträglich, wie man leicht nachprüft:
r
r
r r
r r
a × λb = λ(a × b) = λa × b
Eine wichtige Regel ist das Ausmultiplizieren bzw. Ausklammern
r r r
r r r r
a × (b + c ) = a × b + a × c
r r r r r r r
(a + b) × c = a × c + b × c
(Distributivgesetze)
Wegen der Antikommutativität genügt es, das erste zu beweisen. Dazu zerlegen wir den Übergang
r
r r
r
von einem beliebigen Vektor b zu a × b (wobei a fest), in drei Teilschritte:
r
r
r
1. Senkrechte Projektion von b auf die zu a senkrecht Ebene (Vektor b' in der Figur)
r
2. in dieser Ebene: Drehung 90°, diesmal bezüglich a als Rechtsschraube
r
3. Streckung mit Faktor a
Jeder dieser Teilschritte kann bei einer Summe von Vektoren summandenweise angewendet werden,
was folglich auch für die Gesamtoperation gilt; dies ist aber gerade das Distributivgesetz.
Damit können wir nun schon die Komponentenformel herleiten. Wir schreiben
⎡ 1⎤
⎡0⎤
⎡0⎤
r ⎡ a1 ⎤
r
r
r r
a = ⎢a 2 ⎥ = a1 ⎢0⎥ + a 2 ⎢ 1⎥ + a 3 ⎢0⎥ = a1e 1 + a 2 e 2 + a 3 e 3 , b analog, und erhalten mit den bisherigen
⎢a ⎥
⎢⎣0⎥⎦
⎢⎣0⎥⎦
⎢⎣ 1⎥⎦
⎣ 3⎦
3 3
r r
r r
Rechenregeln a × b = ∑ ∑ a ib j e i × e j . Die Produkte der Einheitsvektoren sind leicht zu berechnen, da
i =1 j =1
r r r
r
r
r r
r r
sie senkrecht aufeinander stehen und Länge 1 haben: e1 × e1 = 0 , e1 × e 2 = e 3 , e 2 × e1 = −e 3 , etc.
r r
r
r
r
Somit ergibt sich a × b = (a 2b 3 − a 3b 2 )e1 + (a 3b1 − a1b 3 )e 2 + (a1b 2 − a 2b1 )e 3 , d.h.
⎡ a1 ⎤ ⎡ b1 ⎤ ⎡ a 2b 3 − a 3b 2 ⎤
⎢a 2 ⎥ × ⎢b 2 ⎥ = ⎢− (a1b3 − a3b1 )⎥
⎢a ⎥ ⎢b ⎥ ⎢ a b − a b ⎥
2 1 ⎦
⎣ 3⎦ ⎣ 3⎦ ⎣ 1 2
Die Schreibweise in der mittleren Komponente wurde so gewählt, weil man alle 3 Komponenten
⎡ a1 b1 ⎤
zunächst als Unterdeterminante der Matrix ⎢a 2 b 2 ⎥ berechnen kann (vgl. Abschnitt II.2), mit
⎢a b ⎥
⎣ 3 3⎦
anschliessendem Vorzeichenwechsel in der mittleren Komponente.
r r v
r r v
In Anwendungen kommen häufig auch Produkte von 3 Vektoren vor, z. B. (a × b ) × c und (a × b) • c
r r
r
( • = Skalarprodukt). Das erste ist ein Vektor, der senkrecht zu a × b steht und somit in der von a und
r
r
r
b aufgespannten Ebene liegt, also eine Linearkombination von a und b sein muss. Mit Hilfe der
Komponentenformel kann man sich davon überzeugen, dass
3
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
r v r r v r
r r v
(a × b) × c = −(b • c )a + (a • c )b
r r v
Das Produkt (a × b ) • c ist eine Zahl; es ist auch unter dem Namen Spatprodukt bekannt, weil der
r r v
r r v
Betrag dieser Zahl das Volumen des von a, b, c aufgespannten Spates (Parallelflächner; falls a, b, c
r
r
senkrecht zueinander sind: Quader) ist. Wenn man das von a und b aufgespannte Parallelogramm
als Grundfläche des Spates betrachtet, ist die Höhe gleich (eventuell mit falschem Vorzeichen) der
r
r r
v
1 r r
Projektion von c auf a × b , also gleich ( r r (a × b)) • c , das Volumen daher
a ×b
r r v
r r
v
1 r r
a × b ⋅ ( r r (a × b)) • c = (a × b) • c . Die Berechnung des Spatproduktes in Komponenten ergibt
a ×b
⎡ a1 b1
r r r
(a × b) • c = (a 2b 3 − a 3b 2 )c 1 − (a1b 3 − a 3b1 )c 2 + (a1b 2 − a 2b1 )c 3 = det( ⎢a 2 b 2
⎢a b
3
⎣ 3
c1 ⎤
c 2 ⎥)
c 3 ⎥⎦
(Determinanten werden in Abschnitt II.2 eingeführt.)
I.2
Anwendungen
Anwendungen in der Geometrie
r r
1 r r
(b − a ) × (c − a )
2
1)
F=
2)
Abstand d des Punktes p von der Geraden durch a und b:
r r
r r
(p − a ) × (b − a )
d=
r r
b−a
Abstand d des Punktes p von der Ebene durch a, b und c:
r r
r r
r r
((b − a ) × (c − a )) • (p − a )
d=
r r
r r
(b − a ) × (c − a )
Fläche F des Dreiecks mit den Ecken a, b, c:
r r
Bemerkung: b − a ist der Verbindungsvektor von a nach b.
3)
4)
r r
r
r r
Koordinatengleichung der Ebene durch a, b und c:
Der Vektor n = (b − a ) × (c − a ) ist ein
Normalenvektor der Ebene, ihre Koordinatengleichung ist also n1x1 + n2 x 2 + n3 x 3 = d , wo d
noch zu bestimmen ist (z.B. indem man einen der gegebenen Punkte einsetzt).
V=
r r
r r
r r
((b − a ) × (c − a )) • (d − a )
5)
Volumen V des Tetraeders mit den Ecken a, b, c, d:
6)
r r
r r
r r
((b − a ) × (d − c )) • (c − a )
Abstand s der Geraden durch a, b von der Geraden durch c, d: s =
.
r r
r r
(b − a ) × (d − c )
6
Wenn der Nenner in dieser Formel 0 ist, sind die beiden Geraden parallel. In diesem Fall ist
r r
r r
(b − a ) × (c − a )
(gemäss 2)).
der Abstand s =
r r
b−a
4
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
Die meisten dieser Formeln sind aufgrund der geometrischen Bedeutung der vorkommenden Vektorund Spatprodukte rasch klar (machen Sie jeweils eine Skizze!), ausser vielleicht 6): Hier beachte
r r
man, dass der Vektor c − a ein Verbindungsvektor der beiden Geraden ist und folglich s die
r r
r r
Projektion dieses Vektors auf den zu beiden Geraden senkrechten Vektor (b − a ) × (d − c )
Anwendungen in der Physik
1)
r
Drehmomente: Greift eine Kraft K in einem Punkt p eines Körpers an, so übt sie bezüglich
r
r
r r
eines fest gewählten Punktes p0 das polare Drehmoment Dp 0 = (p − p 0 ) × K aus („Hebelarm x
r
Kraft“). Ist der Körper um eine feste Achse a durch p0 mit Richtungsvektor a drehbar, so ist
r
r
r
r r
a
das axiale Drehmoment Da = ((p − p 0 ) × K ) • r von Interesse (die Projektion von Dp0 auf die
a
Achse). Überlegen Sie, dass man p0 auch durch einen andern Punkt auf der Achse ersetzen
kann, ohne dass sich das axiale Drehmoment ändert.
2)
Corioliskraft: Infolge der Drehung der Erde um sich selbst hat jeder Punkt der Erdoberfläche
eine gewisse Ostgeschwindigkeit. So auch wir, aber solange wir uns relativ zu unserer
Umgebung nicht bewegen, merken wir nichts davon. Bewegen wir uns jedoch z. B. auf der
Nordhalbkugel gegen Norden, so kommen wir in Gebiete mit kleinerer Ostgeschwindigkeit.
Wollen wir den Nordkurs beibehalten, müssen wir also die Ostgeschwindigkeit abbremsen,
wozu eine Führungskraft (ausgeübt von Schiene, Strasse, …) nötig ist. Fehlt diese
Führungskraft, so weichen wir nach Osten ab und erklären uns diese Abweichung als Folge
einer Kraft, der Corioliskraft. Die Berechnung dieser Kraft bzw. der entsprechenden
Beschleunigung ist ein rein mathematisches Problem, das wir aber hier nicht angehen
können. Statt dessen geben wir einfach das Resultat an:
r
r r
C = −2m(ω × v )
r
Dabei ist v die Relativgeschwindigkeit des betrachteten Körpers bezüglich seiner Erdr
Umgebung, m seine Masse, und ω die vektorielle Winkelgeschwindigkeit der Erddrehung,
r
d.h. die Richtung von ω ist die Richtung der Erdachse (vom Süd- zum Nordpol) und der
2π
Betrag ist ungefähr ω ≈
≈ 72.7 ⋅ 10 − 6 [s −1] .
24 ⋅ 60 ⋅ 60
Für einen Körper, der sich gegen Norden bewegt, ergibt diese Formel auf der Nordhalbkugel
tatsächlich eine nach Osten gerichtete Kraft, auf der Südhalbkugel jedoch gegen Westen;
r
direkt auf dem Äquator ist sie Null. Für einen fallenden Körper ( v Richtung Erdmittelpunkt)
ergibt sich auf der ganzen Erdoberfläche eine gegen Osten gerichtete Kraft (am grössten über
dem Äquator, über den Polen Null), was ebenfalls mit der Anschauung übereinstimmt. Um
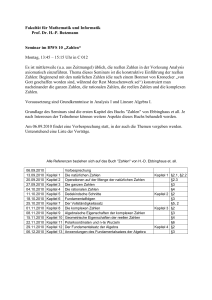
quantitative Berechnungen machen zu können, führen wir ein Koordinatensystem ein, dessen
x-Achse horizontal nach Osten zeigt, die y-Achse horizontal nach Norden, und die z-Achse
vertikal nach oben (Zenit), mit Nullpunkt an dem Ort. wo sich der Körper gerade befindet.
N
r
ω
y ψ
z
ψ
Zerlegung der Winkelgeschwindigkeit
S
5
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
⎤
0
r ⎡
In diesem Koordinatensystem ist ω = ⎢ω cos( ψ )⎥ , wo ψ die geographische Breite bedeutet
⎢ ω sin( ψ ) ⎥
⎣
⎦
(vgl. Figur).
r ⎡v O ⎤
Mit v = ⎢ v N ⎥
⎢v ⎥
⎣ Z⎦
wird
⎡ 0 ⎤ ⎡v O ⎤
r
C = −2mω ( ⎢cos( ψ )⎥ × ⎢ v N ⎥ ) = 2mω
⎢ sin( ψ ) ⎥ ⎢ v ⎥
⎦ ⎣ Z⎦
⎣
⎡v N sin( ψ ) − v Z cos( ψ )⎤
⎢
⎥.
− v O sin( ψ )
⎢
⎥
v
cos(
)
ψ
O
⎣
⎦
Spezialfälle:
⎡v N sin( ψ )⎤
⎥ (Richtung Ost bzw. West)
⎢
0
⎥
⎢
0
⎦
⎣
⎡− v Z cos( ψ )⎤
r
r ⎡0⎤ r
⎥ (Richtung Ost)
v = ⎢ 0 ⎥ ( v Richtung Erdmittelpunkt, vZ negativ) ⇒ C = 2mω ⎢
0
⎥
⎢
⎢⎣v Z ⎥⎦
0
⎦
⎣
⎡ v N sin(ψ ) ⎤
r
r ⎡v O ⎤ r
v = ⎢ v N ⎥ ( v horizontal) ⇒ C = 2mω ⎢− v O sin( ψ )⎥
⎢0⎥
⎢ v cos( ψ ) ⎥
⎦
⎣ O
⎣ ⎦
r
Im letzten Fall interessiert uns vor allem die Horizontalkomponente von C . Diese ist
⎡ vN ⎤
⎡ v N sin(ψ ) ⎤
r
r
Chor = 2mω ⎢− v O sin(ψ )⎥ = 2mω sin(ψ ) ⎢− v O ⎥ , also senkrecht zu v , mit Betrag
⎢ 0 ⎥
⎥
⎢
0
⎦
⎣
⎦
⎣
r
r
r
Chor = 2m ω sin(ψ ) v , unabhängig von der Richtung von v . Auf der Nordhalbkugel
r
(sin(ψ) > 0) zeigt sie von v aus gesehen nach rechts, auf der Südhalbkugel nach links. Wenn
nun bei einem Tiefdruckgebiet auf der Nordhalbkugel die Luft von allen Seiten nach innen
strömt, wird sie überall nach rechts abgelenkt, was schliesslich einen im Gegenuhrzeigersinn
kreisenden Wirbel ergibt, auf der Südhalbkugel jedoch im Uhrzeigersinn. Die Behauptung,
dass man dasselbe in einem Lavabo oder einer Badewanne beobachten könne, ist allerdings
ein Märchen; statistische Untersuchungen haben keinen Unterschied zwischen Nord- und
Südhalbkugel gezeigt. Dies ist auch verständlich: Die Corioliskraft ist in diesem Fall viel zu
klein und ihre Einwirkungszeit viel zu kurz, um einen messbaren Effekt zu erzeugen. Die
Wirbel im Lavabo entstehen durch Unregelmässigkeiten in der Form des Lavabos oder einen
bereits vorhandenen Drehimpuls des Wassers bei Beginn des Abflussvorganges.
r
r ⎡0⎤ r
v = ⎢v N ⎥ ( v Richtung Nord, vN positiv,) ⇒ C = 2m ω
⎢0⎥
⎣ ⎦
3)
r
Lorentzkraft: Auf ein Teilchen mit der Ladung q, das sich mit Geschwindigkeit v in einem
r
r
r
r
Magnetfeld mit Flussdichte B bewegt, wirkt die Lorentzkraft K = q( v × B) .
6
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
II
Lineare Algebra
II.1
Lineare Gleichungssysteme, der Gauss-Algorithmus
Einleitung
Eine lineare Gleichung in einer Unbekannten, a x = b, hat die Lösung x = b/a, falls a ≠ 0. Falls jedoch
a = 0, gibt es zwei Fälle: Falls b ≠ 0, hat die Gleichung keine Lösung (weil 0 x = 0); falls b = 0, ist jede
reelle Zahl Lösung, die Lösungsmenge also R.
Eine lineare Gleichung in zwei Unbekannten, a1x1 + a2x2 = b, hat als Lösungsmenge (d.h. die Menge
2
aller Punkte (x1, x2), welche die Gleichung erfüllen) bekanntlich eine Gerade im R , falls a1, a2 nicht
beide 0 sind. Ist z.B. a1 ≠ 0, so können wir x2 frei wählen und schreiben dafür x2 = t, und x1 muss dann
x1 = (b – a2 t)/a1 sein. Wir können dann den Ortsvektor jedes Lösungspunktes in der Form
⎡ x1 ⎤ ⎡b / a1 ⎤ ⎡− a 2 / a1 ⎤
⎢⎣ x 2 ⎥⎦ = ⎢⎣ 0 ⎥⎦ + t ⎢⎣ 1 ⎥⎦
(t frei)
schreiben. Dies ist eine „Parameterdarstellung“ der Lösungsgerade. Ist a1 = 0 (oder auch nicht), aber
a2 ≠ 0, erhalten wir auf die gleiche Art
⎡ x1 ⎤ ⎡ 0 ⎤ ⎡ 1 ⎤
⎢⎣ x 2 ⎥⎦ = ⎢⎣b / a 2 ⎥⎦ + t ⎢⎣− a1 / a 2 ⎥⎦
Sind a1, a2 beide 0, müssen wir wieder die Fälle b ≠ 0 und b = 0 unterscheiden. Im Fall b = 0 sind alle
2
Punkte (x1, x2) Lösungen, d.h. die Lösungsmenge ist die ganze Ebene R ; im Fall b ≠ 0 hat die
Gleichung keine Lösungen, d.h. die Lösungsmenge ist die leere Menge {}.
Zum besseren geometrischen Verständnis bemerken wir noch, dass in jedem der oberen Fälle der
⎡a ⎤
Vektor ⎢ 1 ⎥ senkrecht auf dem Richtungsvektor der Gerade steht (Skalarprodukt = 0), also ein
⎣a 2 ⎦
„Normalenvektor“ der Geraden ist.
Der Fall einer linearen Gleichung in 3 Unbekannten, a1x1 + a2x2 + a3x3 = b, kann ganz analog
⎡ a1 ⎤
behandelt werden. Wenn a1, a2, a3 nicht alle 0 sind (also der Vektor ⎢a 2 ⎥ nicht der Nullvektor ist), ist
⎢a ⎥
⎣ 3⎦
3
die Lösungsmenge eine Ebene im R ; im Fall a1 ≠ 0 z. B. ist
⎡ x1 ⎤ ⎡b / a1 ⎤
⎡− a 2 / a1 ⎤
⎢x 2 ⎥ = ⎢ 0 ⎥ + s ⎢ 1 ⎥ + t
⎢x ⎥ ⎢ 0 ⎥
⎢ 0 ⎥
⎣ 3⎦ ⎣
⎦
⎣
⎦
⎡− a3 / a1 ⎤
⎢ 0 ⎥
⎢ 1 ⎥
⎦
⎣
(s, t frei)
⎡ a1 ⎤
eine Parameterdarstellung dieser Ebene; wiederum ist ⎢a 2 ⎥ ein Normalenvektor der Ebene. (Prüfen
⎢a ⎥
⎣ 3⎦
Sie, dass das Skalarprodukt mit den beiden Richtungsvektoren 0 ist!). Wenn a1 = a2 = a3 = 0, ist die
3
Lösungsmenge R (falls b = 0) oder {} (falls b ≠ 0).
Der Fall einer linearen Gleichung mit mehr als 3 Unbekannten kann rechnerisch ebenfalls ganz
analog behandelt werden, nur dass wir im Fall n > 3 keine geometrische Vorstellung zur Verfügung
haben.
7
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
Wir gehen jetzt zu Systemen von linearen Gleichungen (m Gleichungen, n Unbekannte) über. Unter
n
der Lösungsmenge eines solchen Systems versteht man die Menge aller Punkte (x1, …, xn) im R , die
alle Gleichungen des Systems erfüllen. Dies ist mengentheoretisch die Schnittmenge der
Lösungsmengen der einzelnen Gleichungen. Betrachten wir als Beispiel den Fall n = 3 (also 3
3
Unbekannte). Aufgrund des oben Gesagten kann die Lösungsmenge nur R , eine Ebene, eine
Gerade, einpunktig oder {} sein. Die Schnittmenge von zwei Ebenen ist normalerweise eine Gerade,
kann aber auch eine Ebene oder {} sein. Die Schnittmenge von drei Ebenen ist normalerweise
einpunktig, kann aber auch eine Ebene oder Gerade oder {} sein. Letzteres kann auch dann eintreten,
wenn keine zwei der drei Ebenen parallel sind, aber die Schnittgerade von zwei Ebenen parallel zur
dritten Ebene ist. Wir sehen, dass schon im Fall n = 3 eine grosse Vielfalt von Fällen auftritt, sodass
ein systematisches Vorgehen nötig ist.
Der Gauss-Algorithmus
Ein lineares Gleichungssystem (m Gleichungen, n Unbekannte)
a11x1 + a12x2 + … + a1nxn = b1
a21x1 + a22x2 + … + a2nxn = b2
:
:
am1x1 + am2x2 + … + amnxn = bm
wird nach Gauss durch eine Folge von Äquivalenz-Umformungen (d. h. Umformungen, welche die
Lösungsmenge L nicht verändern, siehe weiter unten), auf Zeilenstaffelform (row echelon form)
gebracht. Dies bedeutet, dass für jede Gleichung gilt:
Ist xk die erste in dieser Gleichung (mit einem von 0 verschiedenen Koeffizienten) vorkommende
Unbekannte, so enthalten alle folgenden Gleichungen diese Unbekannte nicht mehr. Der Koeffizient
von xk in dieser Gleichung heisst Pivot von xk . Unbekannte mit Pivot nennt man gebunden,
Unbekannte ohne Pivot nennt man frei. Das Gleichungssystem hat dann also folgende Gestalt:
c1pxp + …
c2qxq + …
= d1
= d2
:
Hier sind p < q < … die Nummern der gebundenen Unbekannten. Am Ende des Systems können
dabei auch Gleichungen auftreten, die keine Unbekannten mehr enthalten. Diese sind von der Form
0 =d
Hier entscheidet sich, ob das System überhaupt Lösungen hat: Gibt es auch nur eine einzige solche
Gleichung mit einem d ≠ 0, so hat das System keine Lösung. Andernfalls hat es Lösungen, und die
Lösungsmenge lässt sich wie folgt bestimmen:
Die freien Unbekannten werden als Variable betrachtet („Parameter“ der Lösungsmenge). Die
gebundenen Unbekannten kann man durch „Rückwärts-Einsetzen“ in der Reihenfolge … q, p
ausrechnen:
…;
xq = 1/c2q·(d2 − …);
xp = 1/c1p·(d1 − …)
Dabei werden in … jeweils die schon berechneten bzw. freien Unbekannten mit grösserer Nummer
eingesetzt. Fasst man alle Unbekannten in einen Vektor zusammen, so erhält man den Ortsvektor
eines Punktes (wenn es keine Parameter gibt) oder eine Parameterdarstellung einer Geraden (wenn
es genau einen Parameter gibt) oder einer Ebene (wenn es genau zwei Parameter gibt), usw., alles
im n-dimensionalen Raum.
Jetzt müssen wir noch den Reduktionsprozess beschreiben, der das System auf Zeilenstaffelform
bringt. Man verwendet dabei nur die folgenden drei Arten von Äquivalenz-Umformungen:
1)
Vertauschen von zwei Gleichungen
8
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
2)
Multiplizieren einer Gleichung mit einer von 0 verschiedenen Zahl
3)
Zu einer Gleichung ein Vielfaches einer andern Gleichung addieren
Dies sind Äquivalenz-Umformungen, weil dabei offensichtlich keine Lösungen verloren gehen, aber
auch keine neuen dazukommen, da man ja jede solche Umformung durch eine Umformung gleicher
Art wieder rückgängig machen kann.
Wenn die Unbekannte x1 im System gar nicht vorkommt (d. h. ak1 = 0 für alle k von 1 bis m), ist x1 frei.
Andernfalls wähle man ein k mit ak1 ≠ 0 und vertausche die erste Gleichung mit der k-ten. Wir nehmen
jetzt also a11 ≠ 0 an. Damit ist x1 gebunden, mit Pivot a11. Um zu erreichen, dass x1 in den folgenden
Gleichungen nicht mehr vorkommt, addieren wir zur j-ten Gleichung (für j von 2 bis m) das (−aj1/a11)fache der ersten Gleichung.
Dieses Verfahren wiederholen wir nun für die Unbekannte x2, und zwar im vollen System, wenn x1 frei
ist, aber nur im System der Gleichungen 2 bis m, wenn x1 gebunden ist, hierauf für x3 usw.
Dieser Reduktionsprozess kann solange fortgesetzt werden, bis die Zeilenstaffelform für das ganze
System erreicht ist.
Bemerkungen
1. Welche Unbekannten frei und welche gebunden sind, hängt vom Reduktionsprozess ab, in
dem man ja viele Wahlmöglichkeiten hat. Jedoch ist die Anzahl der freien Variablen festgelegt,
wenn das System überhaupt Lösungen hat, denn diese Anzahl ist die Dimension der
Lösungsmenge.
2. Umformungen vom Typ 2) wurden in der obigen Beschreibung des Reduktionsprozesses gar
nicht verwendet. Sie sind aber manchmal nützlich, um im System möglichst einfache Zahlen zu
haben.
3. Auf Taschenrechnern und in Matlab gibt es die Funktion rref (reduced row echelon form).
Diese treibt die Umformung noch etwas weiter. Sie ist anzuwenden auf die sogenannte
erweiterte Matrix (rechteckiges Schema der gegebenen Zahlen) des Systems,
⎡ a11 ... a1n b1 ⎤
⎢
⎥
...
:
: ⎥
⎢ :
⎢⎣a m1 ... amn bm ⎥⎦
und liefert die erweiterte Matrix eines äquivalenten Systems, bei dem alle Pivots 1 sind, und wo
auch oberhalb eines solchen Pivots in der gleichen Spalte nur noch Nullen stehen, was man ja
durch Anwendung von Umformungen vom Typ 2) und 3) immer erreichen kann. Dies
vereinfacht den Prozess des Rückwärts-Einsetzens.
Beispiel
Gegeben ist das System (b ist noch nicht spezifiziert)
w + x + y + z =2
2w – x + 3y + 2z = 1
–w + 2x – 2y – z = b
Der erste Reduktionsschritt ergibt
1w + x + y + z = 2
–3x + y
= –3
3x – y
=b+2
Der zweite Reduktionsschritt ergibt (die fettgedruckten Zahlen sind die gewählten Pivots)
1w + x + y + z = 2
–3x + y
= –3
0 =b–1
womit die Zeilenstaffelform erreicht ist. Wir können jetzt zwei Fälle unterscheiden:
Wenn b ≠ 1, hat das System wegen der letzten Gleichung keine Lösungen. Wenn b = 1, ist es lösbar,
die beiden Unbekannten y, z sind frei. Wir setzen y = s, z = t (Parameter der Lösungsmenge) und
erhalten durch Rückwärtseinsetzen x = (–3 – y)/( –3) = 1 + s/3, w = 2 – x – y – z = 2 – 1 – s/3 – s – t =
1 – 4s/3 – t.
9
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
Vektoriell zusammengefasst:
⎡ w ⎤ ⎡ 1⎤
⎡− 4 / 3⎤ ⎡− 1⎤
⎢ x ⎥ ⎢ 1⎥
⎢ 1/ 3 ⎥ ⎢ 0 ⎥
⎢ y ⎥ = ⎢0⎥ + s ⎢ 1 ⎥ + t ⎢ 0 ⎥
⎢ z ⎥ ⎢⎣0⎥⎦
⎢⎣ 0 ⎥⎦ ⎢⎣ 1 ⎥⎦
⎣ ⎦
Dies stellt eine Ebene im 4-dimensionalen Raum dar.
Der Matlab-Befehl für den Fall b = 1 lautet rref([1 1 1 1 2; 2 -1 3 2 1; -1 2 -2 -1 1])
und liefert das Resultat
1.0000
0
0
0
1.0000
0
1.3333
-0.3333
0
1.0000
0
0
1.0000
1.0000
0
Lesen Sie daraus die Lösungsmenge ab! (w = 1 – 4y/3 – z; x = 1 + y/3; y, z frei).
Für den Fall b = 5 ergibt rref([1 1 1 1 2; 2 -1 3 2 1; -1 2 -2 -1 5]) jedoch
1.0000
0
0
0
1.0000
0
1.3333
-0.3333
0
1.0000
0
0
0
0
1.0000
Die letzte Zeile entspricht hier der Gleichung 0 = 1 im System, weshalb es keine Lösungen hat.
II.2
Matrizen und Determinanten
Unter einer mxn-Matrix (m Zeilen, n Spalten) versteht man ein rechteckiges Zahlenschema
⎡ a11 a12
⎢
A = ⎢ a 21 a 22
:
:
⎢a
⎣ m1 am2
... a1n ⎤
... a 2n ⎥
:::
: ⎥
... amn ⎥⎦
Bei dieser Doppelindex-Schreibweise ist jeweils der erste Index der Zeilenindex (Nummer der Zeile),
der zweite der Spaltenindex. Dass solche Matrizen bei linearen Gleichungssystemen eine Rolle
spielen, kann man schon im Abschnitt II.1 erahnen. Sie spielen aber auch in andern Gebieten der
Mathematik und auch in der Physik eine wichtige Rolle. Z. B. ist der Trägheitstensor eines starren
Körpers eine Matrix, mit der man für jede Achsenrichtung das Trägheitsmoment des Körpers
bezüglich der Achse (mit der gegebenen Richtung) durch den Schwerpunkt berechnen kann.
Um diese Matrizen zu einem nützlichen Instrument zu machen, muss man aber Rechenoperationen
definieren. Addition und Subtraktion werden komponentenweise ausgeführt, sind also nur für Matrizen
jeweils gleicher Dimension mxn definiert. Ausserdem ist Multiplikation einer Matrix mit einer Zahl
ebenfalls immer komponentenweise gemeint (wie bei Vektoren, die man ja auch als einspaltige
Matrizen auffassen kann). Für diese drei Operationen gelten auch die von Zahlen bzw. Vektoren her
bekannten Rechenregeln. Die komponentenweise Multiplikation kann man natürlich auch betrachten;
sie ist aber nicht so nützlich. Statt dessen wird eine andere Multiplikation eingeführt, und zwar so,
dass die linke Seite eines linearen Gleichungssystems als Matrixprodukt A ⋅ X betrachtet werden
kann. Allgemein formuliert: Das Produkt einer mxn-Matrix A mit einer nxp-Matrix B ist eine mxp-Matrix
C = A·B, deren Komponente an der Stelle (i, k) (d.h. i-te Zeile, k-te Spalte) mit der Formel
n
c ik = ai1b1k + ai2b 2k + ... + ainbnk = ∑ aijb jk
j =1
berechnet wird. Das Produkt einer Matrix A mit der Matrix B ist also nur definiert, wenn die
Zeilenlänge („Breite“) von A mit der Spaltenlänge („Höhe“) von B übereinstimmt, und die Komponente
an der Stelle (i,k) ist eine Art Skalarprodukt der i-ten Zeile von A mit der k-ten Spalte von B.
10
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
Die Rechenregeln für diese neue Operation sind
A·(B·C) = (A·B)·C
(Assoziativgesetz)
A·(B + C) = A·B + A·C
(A + B)·C = A·C + B·C
(Distributivgesetze)
immer unter der Voraussetzung, dass die Dimensionen so sind, dass die Produkte definiert sind. Das
direkte Nachprüfen dieser Relationen ist etwas mühsam. Als Übung ist es jedoch sehr zu empfehlen,
mindestens eine davon für 2x2-Matrizen nachzurechnen.
Das Kommutativgesetz gilt jedoch nicht, auch wenn A·B und B·A beide definiert sind und die gleiche
Dimension haben.
Beispiel:
⎡0 1⎤ ⋅ ⎡0 0⎤ = ⎡ 1 0⎤ , aber
⎢⎣0 0⎥⎦ ⎢⎣ 1 0⎥⎦ ⎢⎣0 0⎥⎦
⎡0 0⎤ ⋅ ⎡0 1⎤ = ⎡0 0⎤
⎢⎣ 1 0⎥⎦ ⎢⎣0 0⎥⎦ ⎢⎣0 1⎥⎦
⎡ 1 0 ... 0⎤
⎢0 1
0⎥
Wir erwähnen noch die spezielle nxn-Matrix En = ⎢
(Einsen auf der Diagonale, Nullen
:
⋅. : ⎥
⎢0 0 ... 1⎥
⎣
⎦
daneben), genannt Einheitsmatrix der Dimension nxn. Für diese gilt A ⋅ En = A = Em ⋅ A , für jede mxnMatrix A, d.h. diese Einheitsmatrizen verhalten sich bei Multiplikation wie bei den Zahlen die 1. Wenn
klar ist, welche Dimension gemeint ist, schreiben wir auch nur E statt En.
Wie bereits gesagt, können wir ein lineares Gleichungssystem jetzt auch als Matrixgleichung
A⋅X = B
schreiben (A gegebene mxn-Matrix, B gegebene mx1-Matrix, X unbekannte nx1-Matrix). Es ist
naheliegend sich zu fragen, ob man dies nicht mittels einer Division durch A tun kann. Im Fall von
Zahlen kann man ja durch jede Zahl a ≠ 0 dividieren, indem man mit a-1 multipliziert, und a-1 ist eine
Zahl mit der Eigenschaft a-1a = 1. Entsprechend suchen wir nun zu A eine Matrix C mit der
Eigenschaft
A·C = E, C·A = E
(Wegen der Nichtkommutativität braucht es beide Gleichungen.) Hat man ein solches C (man nennt
es eine Inverse von A), so ist die Gleichung A·X = B gleichbedeutend mit X = C·B, denn aus A·X = B
folgt C·A·X = C·B, wegen C·A = E also X = C·B. Umgekehrt folgt aus X = C·B, dass A·X = A·C·B,
wegen A·C = E also A·X = B.
Man kann nun zeigen, dass die Existenz einer Inversen höchstens im Fall n = m möglich ist.
Tatsächlich zeigt die obige Überlegung, dass, wenn eine Inverse C zu A existiert, das
Gleichungssystem A·X = B unabhängig von B immer genau eine Lösung besitzt (nämlich X = C·B),
was im Fall n ≠ m nie richtig ist. (Dies kann man mit Hilfe des Gauss-Algoritmus’ einsehen, wir gehen
aber hier nicht näher darauf ein.) Wir setzen daher von jetzt an bei der Frage nach einer Inversen C
von A voraus, dass A eine „quadratische“ Matrix ist, und analysieren zuerst den Fall n = 2.
Inverse einer 2x2-Matrix
a12 ⎤ ⎡c11 c12 ⎤ ⎡ 1 0⎤
⎡a
Wir suchen zunächst ein C mit A·C = E, d.h. ⎢ 11
⎥⋅⎢
⎥ = ⎢⎣0 1⎥⎦ , ausgeschrieben
a
a
22 ⎦ ⎣c 21 c 22 ⎦
⎣ 21
a11c12 + a12c22 = 0
| ·a22
| ·(−a21)
a11c11 + a12c21 = 1
a21c11 + a22c21 = 0
a21c12 + a22c22 = 1
| ·(−a12)
| ·a11
Um jeweils ein Unbekannte zu eliminieren, multiplizieren wir untereinander stehende Gleichungen mit
den hinten angegebenen Zahlen und addieren sie, was folgende vier neue Gleichungen ergibt:
11
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
(a11a22 − a21a12) c11 = a22
(a11a22 − a21a12) c21 = −a21
HS 2011 / baw2
(a11a22 − a21a12) c12 = −a12
(a11a22 − a21a12) c22 = a11
Diese sind zwar nicht unbedingt äquivalent zu den ursprünglichen, aber wir können ja die Lösung am
Schluss durch Einsetzen überprüfen. Auffallend ist, dass in allen vier Gleichungen der Faktor vor der
Unbekannten gleich ist, nämlich d := a11a22 − a21a12. Man nennt diesen Faktor die Determinante der
Matrix A. Ist d ≠ 0, muss c11 = a22/d, c21 = −a21/d, c12 = −a12/d, c22 = a11/d gelten, zusammengefasst
c 12 ⎤ 1 ⎡ a 22 − a12 ⎤
⎡c
=
C = ⎢ 11
⎣c 21 c 22 ⎥⎦ d ⎢⎣− a 21 a11 ⎥⎦
Die Überprüfung ergibt, dass wirklich A·C = E, aber nicht nur dies, sondern auch C·A = E, d.h. wir
haben tatsächlich eine Inverse von A gefunden! Und die Herleitung zeigt auch, dass es die einzige ist.
Man bezeichnet sie mit inv(A) oder A-1. Ist hingegen die Determinante d = 0, so zeigen die vier neuen
Gleichungen, dass es keine Lösung geben kann, wenn auch nur eine Komponente von A von Null
verschieden ist (links steht überall 0). Wenn aber A die Nullmatrix ist, hat sie sowieso keine Inverse.
Wir fassen unsere Erkenntnisse zusammen:
Eine 2x2-Matrix A hat genau dann eine Inverse, wenn ihre Determinante d = a11a22 − a21a12 von Null
verschieden ist. Die Inverse ist eindeutig bestimmt und gegeben durch
inv( A ) =
1 ⎡ a 22 − a12 ⎤
d ⎢⎣− a 21 a11 ⎥⎦
Wir können nun damit beispielsweise das lineare Gleichungssystem
3 x1 + 5 x 2 = 1
2 x1 − 5 x 2 = 9
⎡x ⎤
in Matrixform geschrieben: ⎡3 5 ⎤ ⋅ ⎢ 1 ⎥ = ⎡ 1⎤
⎢⎣2 − 5⎥⎦ ⎣ x 2 ⎦ ⎢⎣9⎥⎦
1 ⎡− 5 − 5⎤ ⎡ 1⎤ ⎡ 2 ⎤
⎡x ⎤
so auflösen: Es ist d = 3·(–5) – 2·5 = –25 ≠ 0, also ⎢ 1 ⎥ = inv( A ) ⋅ ⎡ 1⎤ =
.
⋅
=
⎢
⎥
9
x
⎣
⎦
−
25 ⎢⎣− 2 3 ⎥⎦ ⎢⎣9⎥⎦ ⎢⎣− 1⎥⎦
⎣ 2⎦
Der Vorteil dieser Methode gegenüber dem Gauss-Algorithmus ist der, dass sie eine explizite Formel
für die Lösung liefert (Cramer-Regel, vgl. nächsten Abschnitt), aber eben nur für den Fall, dass die
Determinante von A nicht Null ist. Wir versuchen nun, die Methode auf höhere Dimensionen zu
verallgemeinern. Der kritische Punkt dabei ist die Definition der Determinanten.
Determinanten
Die Determinantenfunktion det ordnet jeder quadratischen Matrix A eine Zahl zu, ihre Determinante
det(A). Für 1x1-Matrizen A = [a11] definieren wir det(A) = a11, für 2x2-Matrizen haben wir sie oben
schon definiert: det(A) = a11a22 − a21a12. Wir listen nun einige Eigenschaften auf, die wir von der
Determinantenfunktion allgemein erwarten, weil sie offensichtlich für n = 2 erfüllt sind.
1)
det(E) = 1
2)
det(A) ist linear bezüglich jeder Spalte von A.
Um zu erklären, was damit gemeint ist, schreiben wir A = [S1, …, Sn], wo S1, …, Sn die
Spalten von A sind. Ist nun die k-te Spalte eine Summe von zwei Vektoren, Sk = Sk’+Sk’’, so
soll
det(A) = det([…,Sk’,…]) + det([…,Sk’’,…]) gelten, wobei in […,Sk’,…] und […,Sk’’,…] alle
Spalten ausser der k-ten gleich sind wie in A. Ebenso, wenn Sk = λSk’ mit einem Zahlenfaktor
λ, soll det(A) = λ det([…,Sk’,…]) gelten.
3)
Wenn man zwei Spalten von A vertauscht, wechselt det(A) nur das Vorzeichen.
12
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
4)
HS 2011 / baw2
Für die transponierte Matrix AT gilt det(AT) = det(A)
Die transponierte Matrix AT erhält man aus A durch Spiegeln an der Hauptdiagonale, d.h.
(AT)ik = aki . Dadurch werden aus den Zeilen von A Spalten von AT, und umgekehrt. Die
Eigenschaft 4) hat zur Folge, dass die Eigenschaften 2) und 3), und auch 5) bis 7) unten,
analog für Zeilen gelten.
5)
Entwicklung von det(A) nach der 1. Spalte:
2 +1
n +1
ˆ
ˆ
ˆ
det( A ) = ( −1)1+1a11 det( A
a 21 det( A
an1 det( A
(11) ) + ( −1)
( 21) ) + ... + ( −1)
(n1) )
Diese Formel gestattet, die Berechnung einer Determinante auf Determinanten von Matrizen
kleinerer Dimension zurückzuführen. Wir bezeichnen mit  (ik ) die Untermatrix von A, die man
durch Streichen der i-ten Zeile und k-ten Spalte erhält, eine (n−1)x(n−1)-Matrix, die auch die
ˆ ) wird auch –
zu (i,k) komplementäre Untermatrix genannt wird. Ihre Determinante det( A
(ik )
etwas unpräzis – die zu (i,k) komplementäre Unterdeterminante genannt. In der Formel wird
jedes Element der 1. Spalte mit der komplementären Unterdeterminante und einem
abwechselnden Vorzeichen multipliziert, und alle diese Produkte werden addiert. Wegen 1)
bis 5) kann man aber die Determinante genauso gut nach irgendeiner anderen Spalte oder
irgendeiner Zeile entwickeln. Z. B. lautet die Entwicklung nach der 2. Zeile:
2+ 2
2+n
ˆ
ˆ
ˆ
det( A ) = ( −1)2 +1a 21 det( A
a 22 det( A
a 2n det( A
( 21) ) + ( −1)
( 22 ) ) + ... + ( −1)
( 2n ) )
Hier beginnt das abwechselnde Vorzeichenmuster also mit „−“.
Wir notieren noch zwei Folgerungen aus 2) und 3)
6)
Wenn zwei Spalten von A gleich sind, ist det(A) = 0.
7)
Wenn man zu einer Spalte von A ein Vielfaches einer andern Spalte addiert, ändert sich die
Determinante nicht.
Nun gilt es zu beweisen, dass eine Funktion det mit den Eigenschaften 1) bis 5) wirklich existiert.
Wenn man die Determinanten für Matrizen der Dimension (n−1)x(n−1) schon definiert hat, und zwar
so, dass 1) bis 5) für diese und kleinere Dimensionen gelten, kann man sie mittels der ersten Formel
in 5) (Entwicklung nach der ersten Spalte) für Matrizen der Dimension nxn definieren. Man muss dann
noch die Eigenschaften 1) bis 4) für Matrizen der Dimension nxn nachweisen. So kann man Stufe um
Stufe zu Matrizen beliebiger Dimension aufsteigen. Wir illustrieren das Verfahren (man nennt es
„Induktion“) am Übergang von Stufe 2 zu Stufe 3.
Wie gesagt, gelten alle Regeln für die bereits definierten Determinanten von 2x2-Matrizen. Für eine
3x3-Matrix erhalten wir durch Entwicklung nach der ersten Spalte
⎡a11 a12
det( ⎢a 21 a 22
⎢a
⎣ 31 a 32
a13 ⎤
⎡a
a 23 ⎥ ) = a11 det( ⎢ 22
⎥
⎣a 32
a 33 ⎦
a 23 ⎤
⎡a
) − a 21 det( ⎢ 12
a 33 ⎥⎦
⎣a 32
a13 ⎤
⎡a
) + a 31 det( ⎢ 12
a 33 ⎥⎦
⎣a 22
a13 ⎤
)=
a 23 ⎥⎦
= a11(a 22a 33 − a 32a 23 ) − a 21(a12a 33 − a 32a13 ) + a 31(a12a 23 − a 22a13 ) =
= a11a 22a 33 + a 21a 32a13 + a 31a12a 23 − a11a 32a 23 − a 21a12a 33 − a 31a 22a13
Mit dieser letzten Form sind jetzt die Regeln 1) bis 4) leicht nachzuweisen. Um z. B. 2) zu begründen,
bemerke man, dass jeder der sechs Summanden aus jeder Spalte genau einen Faktor enthält. Somit
ist klar, dass diese Funktion bezüglich jeder Spalte von A linear ist. Bei Vertauschung von zwei
Spalten geht jeder der Summanden mit einem „+“ in einen Summanden mit „−“ über, und umgekehrt,
womit 3) begründet ist. Der Leser möge selber überlegen, warum 1) und 4) gelten.
13
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
Für die soeben hergeleitete Formel für die Determinante einer 3x3-Matrix gibt es eine einfache
Merkregel, die „Regel von Sarrus“: Man schreibe die Matrix zweimal untereinander und berechne die
zu addierenden Produkte gemäss nachstehendem Schema
a11
a 21
a 31
a11
a 21
a 31
a12
a 22
a 32
a12
a 22
a 32
a13
a 23
a 33
a13
a 23
a 33
−
−
−
+
+
+
Der allgemeine Übergang von Stufe n−1 auf Stufe n ist natürlich etwas komplizierter, weil es nicht
ganz einfach ist, die Summanden in der ausmultiplizierten Form der Determinante zu charakterisieren.
Beim Übergang n−1 → n vervielfacht sich die Anzahl Summanden um Faktor n, also sind es
insgesamt
1·2·3·…·n = n! Summanden; jeder besteht aus n Faktoren, aus jeder Spalte und jeder Zeile genau
einer, aber das Problem ist die Festlegung des Vorzeichens. Wir wollen dies hier nicht weiter
verfolgen, betonen aber noch, dass die Regel von Sarrus nur im Fall n = 3 gilt, da sie ja 2n
Summanden liefert statt n!. Nur im Fall n = 3 ist 2n = n!.
Die Berechnung einer Determinante kann mit den Regeln 2) und 7) stark vereinfacht werden, indem
sich die Matrix durch Umformungen dieser Art auf „Dreiecksform“ bringen lässt, ähnlich wie man im
Gauss-Algorithmus ein Gleichungssystem auf Staffelform bringt. „Dreiecksform“ bedeutet, dass
unterhalb (oder oberhalb) der Hauptdiagonale nur Nullen stehen. Die Determinante einer
Dreiecksmatrix ist einfach das Produkt der Hauptdiagonalelemente:
⎡a11 a12
⎢0
⋅.
det( ⎢
:
⎢
..
⎣0
.. a1n ⎤
.. a 2n ⎥
) = a11a 22 ...ann
⋅. : ⎥
⎥
0 ann ⎦
Begründen Sie dies!
Zum Schluss noch eine weitere wichtige Eigenschaft der Determinantenfunktion:
8)
det(B·A) = det(B)·det(A)
Auch diese ist nicht ganz einfach zu beweisen. Für n = 2 ist sie rasch nachgerechnet (tun Sie es!),
aber für höhere Dimensionen wird der Aufwand bald zu gross, sodass nur theoretische Betrachtungen
zum Ziel führen: Man zeigt erstens, dass die Funktion det’(A) := det(B·A) (B fest, A variabel) die
Eigenschaften 2) und 3) erfüllt, und zweitens, dass für jede Funktion det’, die 2) und 3) erfüllt, gilt:
det’(A) = det’(E)·det(A). (Wir gehen nicht auf die Details ein.) Da in unserem Fall
det’(E) = det(B·E) = det(B), ist 8) erfüllt.
Inverse einer nxn-Matrix
Wir können nun die Frage nach der Inversen einer nxn-Matrix A beantworten. Um aufwändige
Rechnungen zu vermeiden, geben wir direkt das Resultat an und kontrollieren seine Korrektheit.
Eine nxn-Matrix A hat genau dann eine Inverse, wenn ihre Determinante d = det(A) von Null
verschieden ist. Die Inverse ist eindeutig bestimmt und ihre Komponente an der Stelle (i,k) ist
gegeben durch
1
ˆ )
(inv( A ))ik = ( −1)i + k det( A
(ki )
d
Zu beachten ist, dass jeweils nicht die zur Stelle (i,k) komplementäre Unterdeterminante zu nehmen
ist, sondern die zur (bezüglich Hauptdiagonale) gespiegelten Stelle (k,i). Überzeugen Sie sich davon,
dass im Fall n = 2 die bereits bekannte Formel (Seite 12) herauskommt.
14
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
Im Fall det(A) = 0 kann es keine Inverse geben, da aus C·A = E nach 8) folgt, dass det(C)·det(A) = 1.
Diese Überlegung zeigt, dass
det(inv( A )) =
1
det( A )
Wir überprüfen jetzt die Formel für inv(A) und berechnen dazu für die durch die angegebene Formel
definierte Matrix C beispielhaft die beiden Komponenten (C·A)11 und (C·A)12.
(C ⋅ A )11 = c11a11 + c12a 21 + ... + c1nan1 =
=
1
1
1+ 2
1+ n
ˆ
ˆ
ˆ
(( −1)1+1 det( A
det( A
det( A
det( A ) = 1
(11) )a11 + ( −1)
( 21) )a 21 + ... + ( −1)
(n1) )an1 ) =
d
d
(Entwicklung von det(A) nach der ersten Spalte).
(C ⋅ A )12 = c11a12 + c12a 22 + ... + c1nan2 =
=
1
1+ 2
1+ n
ˆ
ˆ
ˆ
(( −1)1+1 det( A
det( A
det( A
(11) )a12 + ( −1)
( 21) )a 22 + ... + ( −1)
(n1) )an2 )
d
Die Summe in der Klammer ist die Entwicklung nach der 1. Spalte der Determinante der Matrix
A’ = [S2,S2,S3,…Sn], wobei wieder Sk die k-te Spalte von A bezeichnet. Man hat also in A die erste
Spalte durch eine Kopie der 2. Spalte ersetzt. Dies beeinflusst die komplementären Unterˆ ' ) = det( A
ˆ ) . Da det(A’) = 0
determinanten der Elemente der 1. Spalte nicht, d.h. es gilt det( A
( k1)
(k1)
wegen Regel 6), folgt (C·A)12 = 0. Auf ähnliche Art ergibt sich, dass (C·A)kk = 1 und (C·A)ik = 0 für i ≠ k,
und dasselbe für A·C (hier muss man die entsprechenden Regeln für Zeilen verwenden).
II.3
Die Cramer-Regel
Wir kehren jetzt zu den linearen Gleichungssystemen zurück, aber nur im Fall n = m (Anzahl
Unbekannte = Anzahl Gleichungen). Wenn ein solches System gegeben ist,
A·X = B
(A gegebene nxn-Matrix, B gegebene nx1-Matrix, X unbekannte nx1-
Matrix)
und det(A) ≠ 0 (man nennt das System bzw. die Matrix A in diesem Fall regulär), dann hat es nach
den Betrachtungen des letzten Abschnitts genau eine Lösung, nämlich X = inv(A)·B. Dies gilt
allgemeiner auch dann, wenn B eine gegebene nxp-Matrix (p beliebig) und X eine gesuchte nxp-Matrix
ist. Im klassischen Fall p = 1 können wir jedoch die Lösung noch etwas umformen: Die k-te
Unbekannte ist
xk = (inv(A)·B)k =
1
k +2
k +n
ˆ
ˆ
ˆ
(( −1)k +1 det( A
det( A
det( A
(1k ) )b1 + ( −1)
( 2k ) )b 2 + ... + ( −1)
(nk ) )bn )
det( A )
und die Summe in der Klammer ist die Entwicklung einer Determinante nach der k-ten Spalte, aber
nicht der Determinante von A, sondern der Matrix, die man aus A erhält, wenn man die k-te Spalte
durch den Vektor B ersetzt. Wir bezeichnen diese Matrix mit A S ←B . Damit haben wir die
k
sogenannte
Cramer-Regel:
⎡ x1 ⎤
Für die Lösung X = ⎢ : ⎥ eines regulären linearen Gleichungssystems A·X = B gilt
⎢xn ⎥
⎣ ⎦
det( A S ←B )
k
(k = 1…n).
xk =
det( A )
15
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
Betrachten wir als Beispiel nochmals das System
3 x1 + 5 x 2 = 1
2 x1 − 5 x 2 = 9
⎡x ⎤
in Matrixform geschrieben: ⎡3 5 ⎤ ⋅ ⎢ 1 ⎥ = ⎡ 1⎤
⎢⎣2 − 5⎥⎦ ⎣ x 2 ⎦ ⎢⎣9⎥⎦
Es ist det(A) = 3·(–5) – 2·5 = –25 ≠ 0, also ist das System regulär. Nach Cramer erhalten wir
−5 − 45
27 − 2
1
1
= 2 , x2 =
= −1 .
det( ⎡ 1 5 ⎤ ) =
det( ⎡3 1⎤ ) =
x1 =
⎢⎣9 − 5⎥⎦
⎢⎣2 9⎥⎦
− 25
− 25
− 25
− 25
Die Cramer-Regel hat für numerische Berechnungen kaum praktische Bedeutung (ausser vielleicht in
den Fällen n = 2 oder n = 3), da der Gauss-Algorithmus oder ähnliche Verfahren effizienter sind. Sie
sind jedoch sehr nützlich in theoretischen Betrachtungen, z.B. wenn A und/oder B Grössen enthalten,
die noch verändert werden können („Parameter“, z.B. Widerstände in einem elektrischen Netzwerk).
Dann kann man mit ihrer Hilfe untersuchen, wie die Lösung von diesen Parametern abhängt.
Man kann sich fragen, ob die Determinanten in der Cramer-Regel auch eine Bedeutung haben, wenn
das System nicht regulär ist, also det(A) = 0. In der Form
x k det( A ) = det( A S
k
←B
)
sind die Gleichungen auch hier eine Folgerung aus dem ursprünglichen System, aber nicht äquivalent
dazu. Wenn nun auch nur eine der Determinanten det( A S ←B ) (k = 1…n) von Null verschieden ist,
k
hat die entsprechende Gleichung keine Lösung, das ursprüngliche System also auch nicht. Falsch ist
aber, obwohl es oft behauptet wird, dass das System immer unendlich viele Lösungen hat, wenn auch
die Determinanten det( A S ←B ) (k = 1…n) alle Null sind. Einfache Gegenbeispiele sind die Systeme
k
x1 + 2 x 2 − x 3 = 1
2 x1 + 4 x 2 − 2 x 3 = 5
− 5 x1 − 10 x 2 + 5 x 3 = 2
0 x1 + 0 x 2 = 0
0 x1 + 0 x 2 = 1
Beide haben offensichtlich gar keine Lösung, obwohl bei beiden Systemen neben det(A) auch alle
Determinanten det( A S ←B ) Null sind. (Überzeugen Sie sich davon!)
k
II.4
Homogene lineare Gleichungssysteme, lineare (Un-)Abhängigkeit
Die am Schluss des letzten Abschnitts erwähnte Falschbehauptung ist in einem wichtigen Spezialfall
richtig, nämlich wenn B = 0 (rechte Seite des Gleichungssystems Null). Ein solches System
A·X = 0
x1S1 + … + xnSn = 0
oder anders geschrieben:
(wo S1 , …, Sn wieder die Spaltenvektoren von A sind) heisst homogen.
Homogene lineare Gleichungssysteme kommen z.B. in der Theorie der Eigenvektoren von Matrizen
vor (vgl. Übungsblatt „Matrizen und Determinanten“, Aufgabe 6), sowie LAG2), allgemein immer dann,
wenn Vektoren gesucht sind, die nur bis auf Vielfache bestimmt sind, z. B. der Normalenvektor einer
Ebene.
Ein homogenes System hat immer die „triviale“ Lösung X = 0. Wenn es noch eine andere Lösung hat,
wo also mindestens eines der xk ≠ 0 ist, kann man einen der Vektoren S1 ,…, Sn als
Linearkombination der übrigen ausdrücken, d.h. die Vektoren sind dann linear abhängig. Hat das
System nur die triviale Lösung, ist dies nicht möglich, die Vektoren sind linear unabhängig.
Ist det(A) ≠ 0, so hat das System, wie wir wissen, genau eine Lösung, und dies muss die triviale sein,
d.h. die Vektoren S1 ,…, Sn sind linear unabhängig. Wir behaupten nun aber, dass davon auch die
Umkehrung gilt: Wenn die Vektoren (Spalten von A) S1 ,…, Sn linear unabhängig sind, ist det(A) ≠ 0.
Hiezu überlegen wir wie folgt: Wenn wir einen der Vektoren, sagen wir Sk, ersetzen durch
16
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
Sk + λSj, wo λ eine beliebige Zahl ist und j ≠ k, dann bleiben die Vektoren linear unabhängig. Ebenso,
wenn wir zwei Vektoren vertauschen. Durch solche Operationen können wir aber die Matrix auf
Spaltenstaffelform bringen (ähnlich wie wir im Gauss-Algorithmus das Gleichungssystem auf
Zeilenstaffelform gebracht haben): In jeder Spalte steht das erste von Null verschiedene Element
(Pivot) weiter unten als dasjenige der vorherigen Spalte.
⎡ 0 0 0 .. 0⎤
⎢:
: : .. : ⎥
⎢d1 :
⎥
⎢:
⎥
:
⎢
⎥
⎢ : d2
⎥
: : .. : ⎦⎥
⎣⎢ :
Die Pivots d1, d2, … können aber nach rechts hin nicht schneller als in Einerschritten absteigen (und
d1 steht an der Stelle (1,1)), weil sonst die letzte Spalte 0 wäre, was der linearen Unabhängigkeit
widerspräche, d.h. sie müssen auf der Hauptdiagonale liegen. Da die Matrix untere Dreiecksform hat
(oberhalb der Diagonale Nullen), ist ihre Determinante das Produkt der Hauptdiagonalelemente, d.h.
der Pivots, also ≠ 0. Bei den angewandten Manipulationen verändert aber die Determinante der Matrix
höchstens das Vorzeichen, sodass also auch die Determinante der ursprünglichen Matrix ≠ 0 ist.
Etwas anders formuliert: Wenn det(A) = 0, müssen die Spaltenvektoren von A linear abhängig sein,
d.h. das Gleichungssystem x1S1 + … + xnSn = 0 hat auch nichttriviale Lösungen. Wir fassen
zusammen:
Ein homogenes lineares Gleichungssystem A·X = 0 (wo A eine quadratische Matrix ist) hat
genau dann nichttriviale Lösungen, wenn det(A) = 0.
n
Ein Set von n Vektoren S1 , …, Sn im R ist genau dann linear unabhängig, wenn
det([S1, …, Sn]) ≠ 0.
Beide Aussagen bedeuten eigentlich dasselbe, einmal positiv, einmal negativ formuliert. Wenn
n
S1 ,…, Sn linear unabhängig sind, kann man noch mehr sagen: Jeder Vektor B im R lässt sich auf
genau eine Art als Linearkombination von S1 ,…, Sn darstellen, B = x1S1 + … + xnSn, weil das
Gleichungssystem A·X = B (dessen Matrix A = [S1, …, Sn] ja jetzt als regulär erkannt ist), genau eine
n
Lösung hat. Man sagt auch, die Vektoren S1 ,…, Sn bilden eine Basis des R .
n
Man könnte auch fragen, wann m Vektoren S1 ,…, Sm im R linear unabhängig sind, oder allgemeiner,
wann ein Set von m Vektoren p linear unabhängige Vektoren enthält. Die Antwort lautet:
n
Ein Set von m Vektoren S1 , …, Sm im R enthält genau dann p linear unabhängige Vektoren,
wenn es eine reguläre pxp-Untermatrix von A = [S1, …, Sm] gibt,
das heisst, wenn p ≤ m und p ≤ n und es möglich ist, in der Matrix n−p Zeilen und m−p Spalten zu
streichen, so dass die verbleibende pxp-Matrix regulär ist. Die grösste Zahl p mit dieser Eigenschaft
wird auch als Rang von A bezeichnet.
Beweis der Aussage: Wenn es eine solche Untermatrix gibt, sind deren Spalten linear unabhängig,
umso mehr die entsprechenden Spalten von A, denn eine lineare Abhängigkeit würde bestehen
bleiben, wenn man in den Vektoren gewisse Komponenten streicht. Enthält umgekehrt die volle Matrix
A eine Auswahl von p linear unabhängigen Spalten, streichen wir zunächst die andern und bringen
wie oben die restliche Matrix A’ auf Spaltenstaffelform. Es gibt p Pivots, die aber jetzt nach rechts hin
auch rascher absteigen können. Wir streichen jetzt alle Zeilen, die kein Pivot enthalten; es verbleibt
also eine untere Dreiecksmatrix A’’ (pxp mit den Pivots auf der Diagonalen), deren Determinante
somit nicht Null ist. Wenn wir in A’ die Spaltenoperationen, mit denen wir Staffelform erreicht haben,
rückgängig machen, geht A’’ in eine reguläre Untermatrix von A’ und damit von A über (die
Determinante wechselt höchstens das Vorzeichen).
17
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
III
Komplexe Zahlen
III.1
Definition, Rechenoperationen mit komplexen Zahlen
Im Laufe der Geschichte haben die Menschen ihren Zahlenbegriff mehrfach erweitert, von den
natürlichen Zahlen (N) zu Brüchen von natürlichen Zahlen (positive rationale Zahlen), durch
Hinzunahme von 0 und negativen Zahlen zu den rationalen Zahlen (Q), durch Übergang zu unendlich
langen Dezimalbrüchen zu den reellen Zahlen (R). Jedesmal war der Auslöser, dass gewisse
Rechenoperationen im vorhandenen Zahlenbereich nicht ausführbar waren. Die vier
Grundrechenarten sind zwar in Q uneingeschränkt durchführbar, soweit es überhaupt sinnvoll ist (d.h.
ausser Division durch 0), aber nicht alle rationalen Zahlen haben in Q eine Wurzel. In R haben zwar
alle positiven Zahlen eine Wurzel, nicht jedoch die negativen. Um diesen Mangel zu beheben, wurden
schliesslich noch die komplexen Zahlen (C) eingeführt. Der Bereich der komplexen Zahlen ist
algebraisch abgeschlossen, d.h. hier hat sogar jede polynomiale Gleichung immer Lösungen, nicht
nur Gleichungen der Form x2 = a.
Es gibt verschiedene Möglichkeiten, diese komplexen Zahlen einzuführen. Wichtig ist nicht, was sie
„sind“, sondern wie man damit rechnet. In diesem Sinne wählen wir eine Definition, die nahtlos an das
letzte Kapitel anschliesst: Matrizen. Wir bezeichnen mit C die Menge der 2x2-Matrizen der Form
⎡x − y⎤
⎢⎣ y x ⎥⎦
(x, y beliebige reelle Zahlen)
und schreiben sie in der Form
⎡x − y⎤
⎡1 0⎤
⎡0 − 1⎤
⎢⎣ y x ⎥⎦ = x ⎣⎢0 1⎥⎦ + y ⎣⎢ 1 0 ⎦⎥ = xE + yJ
In C können wir alle vier Grundrechenarten uneingeschränkt durchführen, und die Multiplikation ist
sogar kommutativ, obwohl sie dies bei Matrizen allgemein nicht ist. Um dies zu sehen, brauchen wir
die Relationen
J·E = E·J = J, J·J = −E
Rechnen Sie die letzte nach; sie ist grundlegend. Damit wird
(xE + yJ) · (uE + vJ) = (xu−yv)E + (xv+yu)J = (uE + vJ) · (xE + yJ)
1
1
x
−y
⎡ x y⎤
( xE + yJ)−1 =
= 2
( xE − yJ) = 2
E+ 2
J
2
2
⎢
⎥
−
y
x
det( xE + yJ) ⎣
⎦ x +y
x +y
x + y2
Damit diese Inverse existiert, muss nur x2+y2 ≠ 0 sein, d.h. (xE + yJ) darf nicht die Nullmatrix sein. Die
Division wird dann zu
uE + v J
ux + vy
−uy + vx
= (uE + vJ) ⋅ ( xE + yJ) −1 = 2
E+ 2
J
2
xE + yJ
x +y
x + y2
Addition und Subtraktion sind problemlos:
(xE + yJ) ± (uE + vJ) = (x±u)E + (y±v)J
Wir wollen als nächstes eine geometrische Interpretation einführen und gleichzeitig die Schreibweise
vereinfachen. So wie man sich reelle Zahlen als Punkte auf einer Geraden, der „reellen
Zahlengeraden“, vorstellen kann, denken wir uns komplexe Zahlen als Punkte einer Ebene mit
rechtwinkligem Koordinatensystem, der „Gauss’schen Zahlenebene“ oder „komplexen Zahlenebene“.
Der komplexen Zahl xE+yJ entspricht dabei der Punkt (x, y). Die x-Achse des Koordinatensystems
soll der reellen Zahlengeraden entsprechen, damit wir R als Teilmenge von C auffassen können. Wir
18
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
schreiben statt xE+yJ nur noch x+yj, statt x+0j nur x, statt 0+yj nur yj, statt 1j nur j. Dabei ist aus E die
reelle Zahl 1 auf der x-Achse geworden, aus J die „imaginäre Einheit“ j (aus historischen Gründen so
benannt, in der Mathematik meistens mit i bezeichnet, aber in der Elektrotechnik mit j), in der
geometrischen Interpretation dem Punkt (0, 1) auf der „imaginären Achse“ entsprechend, mit der
fundamentalen Beziehung
j2 = −1
Im Übrigen brauchen wir uns keine speziellen Rechenregeln zu merken; für die vier
Grundrechenarten gelten genau die gleichen Regeln wie die, die wir von den reellen Zahlen her
kennen. Wenn wir eine komplexe Zahl mit einem einzigen Symbol bezeichnen, z.B. z = x+yj, nennen
wir x auch den Realteil von z und y (nicht yj !) den Imaginärteil von z, geschrieben
x = Re(z) ,
y = Im(z)
Im
yj
j
˚
˚
˚
r
ϕ
(Matlab: real(z), imag(z))
z
˚1 ˚x
˚
komplexe Zahlenebene
Re
˚ z*
−z
In dieser Zahlenebene liegt –z spiegelbildlich zu z bezüglich 0. Die Zahl, die spiegelbildlich zu z
bezüglich der reellen Achse liegt, heisst die zu z konjugierte Zahl z* (Matlab: conj(z)). Wenn z = x+yj,
ist z* = x−yj. Sie ist nützlich bei der Ausführung einer Division, da z·z* = (x+yj)·(x−yj) = x2−(yj)2 =
x2−(yj)2 = x2+y2 reell ist; man erweitere also den Bruch mit der Konjugierten des Nenners:
u + vj (u + vj)( x − yj) (ux − vyj2 ) + ( −uy + vx ) j ux + vy − uy + vx
=
=
= 2
+ 2
j
x + yj ( x + yj)( x − yj)
x2 + y2
x + y2
x + y2
Beispiel: Wir möchten (1 − j ⋅
1+ 2j 2
) berechnen.
3 − 4j
1+ 2j 2
(1 + 2 j)(3 + 4 j) 2
(3 + 8 j 2 ) + ( 4 + 6 ) j 2
− 5 + 10 j 2
− 1+ 2j 2
) = (1 − j ⋅
)
=
(
1
−
j
⋅
) = (1 − j ⋅
) = (1 − j ⋅
) =
3 − 4j
25
25
5
32 + 42
5 + j − 2 j2 2
7 + j 2 49 + 14 j + j2 48 14
(
) =(
) =
=
+
j = 1.92 + 0.56 j
5
5
25
25 25
(1 − j ⋅
Es ist auch möglich, die Rechenoperationen geometrisch zu interpretieren. Für Addition und
Subtraktion liegt es auf der Hand: Es werden ja einfach entsprechende Koordinaten addiert, und
deshalb können wir auch die Ortsvektoren der beiden Punkte addieren bzw. subtrahieren und
erhalten den Ortsvektor der Summe bzw. Differenz.
Für die geometrische Interpretation von Multiplikation und Division benötigen wir noch eine andere
Darstellung der komplexen Zahlen, die Polarform. (Die Form x+yj wird kartesische Form oder
Normalform genannt.) In der Polarform werden die Polarkoordinaten r, ϕ von z angegeben, d.h. der
Abstand r des Punktes z zum Nullpunkt und der Winkel ϕ, gemessen von der reellen Achse bis zum
Ortsvektor von z (vgl. obige Figur). Es sind verschiedene Schreibweisen geläufig:
z = r∠ϕ = r cis(ϕ) = r e jϕ
19
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
Die erste Schreibweise (gelesen „r Versor ϕ“) wird Versorform genannt und in der Elektrotechnik
gelegentlich noch verwendet. Die zweite ist eine Abkürzung von r(cos(ϕ)+j sin(ϕ)) (mit i statt j); in der
Tat ist ja x = r cos(ϕ) und y = r sin(ϕ). Die dritte verwendet die noch zu definierende Exponentialfunktion. Wir benützen gerade diese Schreibweise. Man nennt r auch den Betrag von z, den Winkel ϕ
das Argument von z,
ϕ = Arg(z)
r = |z| ,
(Matlab: abs(z), angle(z))
Die Umrechnung in die kartesische Form verläuft wie gesagt gemäss
x = r cos(ϕ) ,
y = r sin(ϕ)
in der umgekehrten Richtung gemäss
x
ϕ = sign( y ) ⋅ arccos( )
r
r = x2 + y2 ,
(sign(y) ist das Vorzeichen von y)
Man kann ϕ auch mit Hilfe von arctan(y/x) ausrechnen, muss dann aber noch mehr
Fallunterscheidungen machen. Bei numerischen Berechnungen wird empfohlen, die im Rechner
implementierte Funktion zu verwenden, z.B. eben angle(z) in Matlab. Wir machen darauf aufmerksam,
dass ϕ nur bis auf Vielfache von 2π bestimmt ist, d.h. man kann immer ein ganzzahliges Vielfaches
von 2π addieren oder subtrahieren, ohne die Zahl z zu verändern. Mit Arg(z) ist nach heutiger
Konvention immer der Winkel im Intervall –π < Arg(z) ≤ π gemeint, und so ist auch die entsprechende
Funktion auf Rechnern implementiert.
Wir können nun die angekündigte geometrische Interpretation von Multiplikation und Division
angehen. Seien z = r e jϕ , w = s e jψ in Polarform gegeben. Also
z ⋅ w = r(cos(ϕ) + j sin( ϕ)) ⋅ s(cos(ψ ) + j sin( ψ )) =
rs((cos( ϕ) cos( ψ ) − sin( ϕ) sin( ψ )) + j(cos( ϕ) sin(ψ ) + sin( ϕ) cos( ψ ))) = rs(cos( ϕ + ψ ) + j sin(ϕ + ψ )) = rs e j( ϕ + ψ )
(wobei wir die Additionstheoreme von cos und sin verwendet haben). Das bedeutet:
Um zwei Zahlen zu multiplizieren, multipliziert man ihre Beträge und addiert ihre Argumente.
Um zwei Zahlen zu dividieren, dividiert man ihre Beträge und subtrahiert ihre Argumente.
Die zweite Aussage folgt unmittelbar aus der ersten, weil Division die Umkehrung von Multiplikation
w w ⋅ z * rs e j( ψ − ϕ) s j( ψ − ϕ)
=
=
= e
.
ist. Man kann es auch so sehen: Weil z* = r e j( − ϕ) = r e − jϕ , ist
z
z⋅z*
r
r 2 e j0
Einige Rechenbeispiele:
j2 = 1e
j
π
2
⋅ 1e
j
π
2
= e − jπ = −1
2
(1 + j) ⋅ ( −1 + 3 j) = ( 2 e
3 + j 10
(
) =(
1− j
π
j
2e 6
2e
−j
10
π
4
)
j
π
4 )2
(Statt 1e jϕ schreibt man auch kürzer e jϕ .)
⋅ 2e
=( 2e
j
j
2π
3
= 4e
5π
12 e − jπ )10
j
7π
6
= 4e
−j
10 j
= 2 e
5π
6
= −2 3 − 2 j
5π
⋅10
12
= 32 e
j
25 π
6
= 32 e
j
π
6
= 16( 3 + j)
Die Exponentialschreibweise für die Polarform ist sehr nützlich, weil die Regeln, die wir für
Multiplikation und Division hergeleitet haben, so in natürlicher Weise in die bekannten Rechenregeln
für Potenzen übergehen. In den obigen Rechnungen haben wir auch benutzt, dass
(r e jϕ )m = r me jmϕ
für eine ganze Zahl m
was sich unmittelbar aus den Regeln für Multiplikation und Division ergibt.
20
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
III.2
HS 2011 / baw2
Polynome, komplexe Nullstellen
Dank der Zahl j können wir jetzt auch Wurzeln aus negativen Zahlen ziehen; z.B. hat die Gleichung
z2 = −5 die beiden Lösungen ± 5 j , d.h. das Polynom P(z) = z2 + 5 hat 2 Nullstellen in C. Wir werden
– wie schon erwähnt – sehen, dass jedes nichtkonstante Polynom P(z) in C Nullstellen hat,
beschäftigen uns aber vorerst mit zwei Spezialfällen, wo man die Nullstellen leicht berechnen kann.
a) Kreisteilungsgleichungen
Hier geht es darum, Gleichungen der Form zn = a aufzulösen, d.h. die Nullstellen des Polynoms
P(z) = zn – a zu bestimmen. Dabei ist n eine natürliche, a eine beliebige komplexe Zahl ≠ 0. (Die
Gleichung zn = 0 hat die einzige Lösung z = 0.)
Wir schreiben z und a in Polarform: z = r e jϕ , a = s e jα . Damit lautet die zu lösende Gleichung
r n e jnϕ = s e jα , für Betrag und Winkel einzeln aufgeschrieben
rn = s, nϕ = α mod 2π
Dabei ist mit „mod 2π“ gemeint, dass nϕ und α nur bis auf Vielfache von 2π übereinstimmen müssen,
d.h. nϕ = α + k·2π mit einer ganzen Zahl k. Da s eine positive reelle Zahl ist und r eine solche sein
1
n
s
n
. Für den Winkel haben wir zunächst unendlich viele
soll, ist r eindeutig bestimmt, nämlich r = s =
α
2π
Möglichkeiten, ϕ = + k ⋅
, k ∈ Z. Wenn sich aber zwei Werte von k um ein Vielfaches von n
n
n
unterscheiden, unterscheiden sich die entsprechenden Werte von ϕ um ein Vielfaches von 2π, liefern
also die gleiche Zahl z. Wir erhalten deshalb nur n verschiedene Lösungen, nummeriert z.B. durch
k = 0, 1, …, n−1:
n
zk = s
2π
α
j( + k ⋅ )
n
n
e
=
n
ae
j(
Arg( a )
2π
+k ⋅ )
n
n
,
k = 0, 1, …, n−1
Da alle Lösungen den gleichen Betrag r = n a haben, liegen sie auf einem Kreis um 0 mit diesem
Arg( a )
n
2π
zum Winkel
n
erreicht werden, bilden sie die Ecken eines regelmässigen n-Ecks. Es ist jetzt klar, wieso die
Gleichung zn = a eine „Kreisteilungsgleichung“ genannt wird. Die Lösung z0 wird auch als n-te Wurzel
aus a bezeichnet:
Radius. Da sie ferner von z 0 =
1
n
a = a n := n a e
j
n
ae
j
aus durch Addition eines Vielfachen von
Arg( a )
n
j
π
Wir erinnern daran, dass –π < Arg(a) ≤ π. Es ist also − 1 = 1 e 2 = j (da Arg(−1) = π). Für die so
definierten Wurzeln gelten jedoch die vom reellen Rechnen her bekannten Regeln nicht mehr
uneingeschränkt. Z.B. ist 1 = 1 = ( −1) ⋅ ( −1) ≠
− 1 ⋅ − 1 = j ⋅ j = −1 . Wir gehen später genauer auf
dieses Problem ein.
Spezielle Beachtung verdient der Fall n = 2. Die beiden Lösungen der Gleichung z2 = a sind
z0 = a =
ae
j
Arg( a )
2
, z1 =
ae
j(
Arg( a )
+ π)
2
= −z0 = − a
21
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
Hier noch ein Beispiel für eine „Kreisteilung“:
Im
Lösungen von z3 = −8:
z0
j
˚
˚
˚
z0 = 3 8 e
60°
z1
z1 = 2 e
˚1
˚z
Re
j
π
3
= 2(cos(60 o ) + j sin(60 o )) = 1 + 3 j
π 2π
j( + )
3 3
z2 = 2 e
π 4π
j( +
)
3 3
= 2 e j π = −2
= 2e
−j
π
3
= 1 − 3 j = z 0*
2
Beachten Sie dass, nach unserer Definition von Wurzeln,
Ihren Taschenrechner und Matlab!
3
−8 = 3 8e
j
π
3
= 1 + 3 j , nicht −2. Fragen Sie
b) Quadratische Gleichungen
Auch eine quadratische Gleichung a z 2 + b z + c = 0 (a, b, c є C, a ≠ 0) hat in C immer Lösungen, da in
der Lösungsformel
z 0,1 =
− b ± b 2 − 4ac
2a
die Wurzel jetzt definiert ist. Wenn die Diskriminante d := b2 – 4ac Null ist, gibt es genau eine Lösung
( z 0 = z1 =
−b
−b
), andernfalls zwei, und
liegt in der Mitte zwischen den beiden Punkten z0, z1.
2a
2a
Berechnen wir zur Übung die Lösungen der quadratischen Gleichung z2 + (1+j)z + j = 0:
Die Diskriminante ist d = (1+j)2 − 4j = −2j = 2 e
π
j( − )
2 ,
ihre Wurzel
= 2 (cos( −45°) + j sin( −45°)) = 1 − j . Damit erhalten wir z 0 =
d = 2e
π
j( − )
4
=
−(1 + j) + 1 − j
−(1 + j) − (1 − j)
= − j , z1 =
= −1 .
2
2
Betrachten wir noch den in der Praxis wichtigen Fall einer quadratischen Gleichung mit reellen
Koeffizienten a, b, c: Wenn d > 0, sind beide Lösungen reell (wie bekannt!); wenn hingegen d < 0 (der
früher „unlösbare“ Fall), bilden die beiden Lösungen z 0,1 =
d
−b
d −b
±
=
±
j ein Paar zueinander
2a 2a
2a
2a
konjugierter komplexer Zahlen.
Wir kommen jetzt zum allgemeinen Fall und formulieren gerade das als
Fundamentalsatz der Algebra
bekannte Resultat:
Jedes nichtkonstante Polynom P(z) = anzn + an−1zn−1 + … + a0 hat in C mindestens eine
Nullstelle c (d.h. es gilt P(c) = 0).
22
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
Die Koeffizienten a0, a1, …, an dürfen dabei beliebige komplexe Zahlen sein (an ≠ 0), auch wenn
natürlich der Fall wo sie reell sind von speziellem Interesse ist.
Der erste vollständige Beweis dieser Aussage stammt von C. F. Gauss (1777 bis 1855). Wir
begnügen uns mit einer Skizze eines anschaulichen Beweises, deren Details zwar nicht ausgeführt
werden, aber durchaus plausibel sind.
Wir können annehmen, dass an = 1, da wir ja die Gleichung P(z) = 0 durch an dividieren können, ohne
die Lösungen zu verändern. Wir können auch annehmen, dass a0 ≠ 0, denn wenn a0 = 0, ist P(0) = 0,
d.h. 0 ist eine Nullstelle.
Wir untersuchen nun, wie sich P(z) ändert, wenn wir z auf einem Kreis mit Radius r um den Nullpunkt
einmal herumlaufen lassen. Wenn wir r sehr gross (viel grösser als |an−1| bis |a0| und 1) wählen, ist
P(z) ≈ zn, und diese Zahl macht n Umläufe auf einem Kreis mit Radius rn, da zn = (r e jϕ )n = r ne jnϕ . Die
Zahl P(z) umläuft also auf einer geschlossenen Kurve, die immer in der Nähe des Kreises mit Radius
rn verläuft (eine Art Gummiband, vgl. Figur), n mal den Nullpunkt.
r = 4;
P(z) = z5 + j·z4 +(1−j)·z3 + (−2−j)·z2 + 2·z + (1+3·j)
Lassen wir jetzt r schrumpfen, dann schrumpft auch dieses Gummiband und entfernt sich dabei immer
mehr von Kreisform. Am Schluss, wenn r = 0, ist es zum Punkt a0 zusammengeschrumpft, da
P(0) = a0. Nun muss es aber doch in irgendeinem Zwischenstadium passieren, dass das Gummiband
genau durch den Nullpunkt geht, d.h. es muss auf dem Kreis mit dem gerade aktuellen Radius r einen
Punkt z geben, für den P(z) = 0.
Der Fundamentalsatz ist ein schönes theoretisches Resultat, gibt aber keinen Ansatz, wie die Nullstellen konkret zu berechnen sind. Für den Fall n = 2 haben wir oben die Lösungsformeln angegeben;
ähnliche, wenn auch kompliziertere Formeln gibt es bis Grad 4. Ab Grad 5 gibt es keine allgemeine,
aus Wurzelausdrücken aufgebaute Formel mehr (das wurde von Mathematikern bewiesen!); man ist
also auf numerische Näherungsverfahren angewiesen, z.B. das Newtonverfahren, das Sie
wahrscheinlich aus der Analysis kennen.
Folgerungen aus dem Fundamentalsatz
1)
Produktdarstellung eines Polynoms
Jedes Polynom P(z) = anzn + an−1zn−1 + … + a0 kann auch in der Form
P(z) = an(z−c1)(z−c2)···(z−cn)
dargestellt werden, wobei c1, c2, …, cn (alle) Nullstellen des Polynoms in C sind.
Diese Nullstellen können auch ganz oder teilweise zusammenfallen. Sind c1, c2, …, cr die voneinander
verschiedenen Nullstellen, so erhält man durch Zusammenfassen gleicher Faktoren die Darstellung
23
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
n
n
P(z) = an(z−c1) 1(z−c2) 2···(z−cr)
HS 2011 / baw2
nr
, wobei n1 + n2 + … + nr = n = Grad von P
(Die Zahlen n1, n2 ,…, nr heissen Vielfachheiten der Nullstellen.) Dieser Satz beruht darauf, dass man
bei Vorliegen einer Nullstelle c (durch den Fundamentalsatz garantiert) durch Polynomdivision eine
Faktorzerlegung P(z) = (z−c)·Q(z) herstellen kann. (Die Polynomdivision liefert zunächst eine
Darstellung P(z) = (z−c)·Q(z) + R, wo R eine Konstante ist. Jedoch gilt 0 = P(c) = (c−c)·Q(c) + R = R.)
Das Polynom Q hat einen um 1 kleineren Grad als P. Wenn es noch nicht eine Konstante ist, hat es
nach dem Fundamentalsatz wieder eine Nullstelle, usw. Am Schluss bleibt ein Faktor vom Grad 0
(eine Konstante). Diese muss mit an übereinstimmen, da (z−c1)(z−c2)···(z−cn) = zn + … nach
Wiederausmultiplizieren.
Beispiel: Wir untersuchen das Polynom P(z) = z4 + 2·z3 + 8z + 16. Man kann eine Nullstelle erraten:
−2. Durch Polynomdivision erhält man P(z) = (z + 2)(z3 + 8). Wir haben weiter oben die Lösungen der
Gleichung z3 = −8 bestimmt: −2, 1± 3 j. Also hat unser Polynom P(z) = z4 + 2·z3 + 8z + 16 die
Faktordarstellung P(z) = ( z + 2)2 ( z − 1 − 3 j)( z − 1 + 3 j) . Die Nullstelle −2 ist „doppelt“ vorhanden,
d.h. sie hat Vielfachheit 2. Wenn wir die beiden nicht-reellen Faktoren wieder ausmultiplizieren,
erhalten wir P( z) = ( z + 2)2 (( z − 1)2 − ( 3 j)2 ) = ( z + 2)2 (( z − 1)2 + 3) = ( z + 2)2 ( z 2 − 2z + 4) . Das
Besondere daran ist die Tatsache, dass jetzt alle Faktoren reell sind (d.h. reelle Koeffizienten haben),
allerdings einer davon quadratisch, mit negativer Diskriminante. In diesem einfachen Beispiel hätte
man auch direkt (ohne Verwendung von komplexen Zahlen) auf dieses Resultat kommen können,
aber tatsächlich können wir es verallgemeinern: Jedes reelle Polynom (d.h. die Koeffizienten a0, a1,
…, an sind reell) kann als Produkt von reellen linearen und/oder quadratischen Faktoren dargestellt
werden, genauer:
2)
Reelle Produktdarstellung eines reellen Polynoms
Jedes reelle Polynom P(z) = anzn + an−1zn−1 + … + a0 kann in der Form
n
n
P(z) = an(z−c1) 1···(z−cr) r ( z 2 + β1z + γ1 )m1 ⋅ ⋅ ⋅ ( z 2 + β s z + γ s )m s
dargestellt werden, wobei c1, c2, …, cr (alle) reellen Nullstellen des Polynoms sind, und die
quadratischen Faktoren ebenfalls reell, mit negativer Diskriminante.
Um dies zu begründen, brauchen wir noch einen Hilfssatz:
Wenn c є C Nullstelle des reellen Polynoms P ist, dann ist auch die konjugierte Zahl c*
Nullstelle von P.
Denn 0 = (P(c))* = (ancn + an−1cn−1 + … + a0)* = (ancn)* + (an−1cn−1)* + … + (a0)* =
(an)*(c*)n + (an−1)*(c*)n−1 + … + (a0)* = an(c*)n + an−1(c*)n−1 + … + a0 = P(c*). Hierbei haben wir benutzt,
dass man in einer Summe summandenweise und in einem Produkt faktorweise konjugieren darf
(d.h. (z + w)* = z* + w* und (z·w)* = z*·w*; warum?), und dass die ak reell sind.
Ist nun c eine nichtreelle Nullstelle von P, so können wir also die beiden Faktoren (z−c) und (z−c*)
abspalten: P(z) = (z−c)(z−c*)Q(z). Dann multiplizieren wir sie wieder aus,
(z−c)(z−c*) = z2 – (c+c*)z + cc*, und beachten, dass β = −(c+c*) = −2Re(c) und γ = cc* = |c|2 reell sind.
Dass die Diskriminante dieses reellen Faktors z2 + βz + γ negativ ist, folgt aus der Tatsache, dass er
ja keine reelle Nullstelle hat. Um nun in der gleichen Art mit den Nullstellen von Q fortfahren zu
können, müssen wir wissen, dass auch Q reell ist. Dies kann man einsehen, indem man sich Q(z) als
durch die reelle Polynomdivision P(z) : (z2 + βz + γ) entstanden denkt.
Beispiel: Wie lautet die reelle Faktorzerlegung des Polynoms P(z) = z 6 + z 3 + 1 ? Um die Nullstellen
zu bestimmen, bemerken wir, dass die Substitution w = z3 zunächst auf die quadratische Gleichung
w2 + w + 1 = 0 führt, mit den Lösungen w =
±j
− 1± − 3 − 1± 3 j
=
=e
2
2
24
2π
3
. Die Nullstellen sind
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
8π
2π 4π
4π ⎫
⎧⎪ ± j 2 π ± j( 2 π + 2 π )
mj
±j
± j( +
)
⎪
9
9
3
9
9
3
=e
= e 9 ⎬ , wobei jeweils die beiden
demnach die 6 Zahlen ⎨e
, e
, e
⎪⎩
⎪⎭
Zahlen mit dem betragsmässig gleichen Winkel (±) zueinander konjugiert sind. Nun ist
Re( e ± jα ) = cos( α ) und e ± jα = 1 , also ( z − e jα )(z − e − jα ) = z 2 − 2 cos(α ) z + 1 .
Wenn wir noch beachten, dass cos(160°) = −cos(20°), erhalten wir schliesslich
z 6 + z 3 + 1 = ( z 2 + 2 cos(20°) z + 1) ⋅ ( z 2 − 2 cos( 40°) z + 1) ⋅ ( z 2 − 2 cos(80°) z + 1)
Diese Zerlegung hätten wir ohne den Umweg über die komplexen Zahlen kaum finden können!
Wir prüfen das Resultat mit Matlab:
>> a = pi/9; % 20°
>> p = conv(conv([1 2*cos(a) 1],[1 -2*cos(2*a) 1]),[1 -2*cos(4*a) 1])
p =
1.0000
0
-0.0000
1.0000
-0.0000
0
1.0000
Die Anweisung conv multipliziert zwei Polynome; Ein- und Ausgabe der Polynome geschehen in
Form ihrer Koeffizientenvektoren, d.h. – beispielsweise – der Vektor [2 0 -5 1] würde für das
Polynom 2 z 3 − 5 z + 1 stehen.
III.3
Eulerformel, Exponentialform
In diesem Abschnitt wollen wir die Schreibweise e jϕ für die Zahl mit Betrag 1 und Argument ϕ
rechtfertigen, d.h. die sogenannte Eulerformel
e jϕ = cos( ϕ) + j sin( ϕ)
Dazu wollen wir unabhängig davon für beliebige komplexe Zahlen z definieren, was ez sein soll. Um
Verwechslungen zu vermeiden, schreiben wir dafür vorläufig exp(z) (wie in Matlab). Aus der reellen
x2 x3
Analysis übernehmen wir die bekannte Reihendarstellung von ex (x reell): e x = 1 + x +
+
+ ...
2! 3!
(was als Grenzwert e x = lim (1 + x +
n→∞
exp( z ) := 1 + z +
z2 z3
+
+ ...
2! 3!
x2 x3
xn
+
+ ... +
) zu verstehen ist). Wir definieren also
2!
3!
n!
für beliebige z є C
Natürlich ist nachzuweisen, dass der Grenzwert (n→∞) existiert; dies geschieht jedoch genau gleich
wie im reellen Fall. (Die Fakultät n! geht viel rascher gegen ∞ als die Potenz zn, sobald n > |z|.) Durch
diese Definition ist also gewährleistet, dass exp(x) = ex für reelles x, wir haben die reelle Exponentialfunktion in die komplexe Ebene fortgesetzt, d.h. den Definitionsbereich von R auf C erweitert. Als
nächstes überprüfen wir, dass auch jetzt noch die wichtige Rechenregel
(1)
exp(z + w) = exp(z)·exp(w)
gültig ist. Dazu muss man die rechte Seite ausmultiplizieren und die Summanden geeignet
zusammenfassen. Betrachten wir als Beispiel die Summanden vom Grad 3 (wo also die Summe der
z3
z2
w2
w3
1
3!
3!
Exponenten von z und w gleich 3 ist:
⋅ 1+
⋅w + z⋅
+ 1⋅
= ( z 3 + z 2 w + zw 2 + w 3 ) =
3!
2!
2!
3!
3!
2!
2!
25
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
1 3
1
( z + 3z 2 w + 3zw 2 + w 3 ) = ( z + w )3 ; dies stimmt mit dem Summand vom Grad 3 auf der linken
3!
3!
Seite überein. Für die Summanden vom allgemeinen Grad n braucht man die binomische Formel
n
n!
( z + w )n = ∑ ⎛⎜ n ⎞⎟zk w n − k mit den Binomialkoeffizienten ⎛⎜ n ⎞⎟ =
.
k⎠
k ⎠ k!⋅(n − k )!
⎝
⎝
k =0
Wir folgern
1
exp( z)
(2)
exp( −z ) =
(3)
exp(z*) = exp(z)*
(4)
|exp(jϕ)| = 1
(für reelles ϕ)
da exp(−z)·exp(z) = exp(−z+z) = exp(0) = 1, und weil man summanden- und faktorweise konjugieren
darf, und weil |exp(jϕ)|2 = exp(jϕ)·(exp(jϕ))* = exp(jϕ)·(exp((jϕ)*)) = exp(jϕ)·exp(−jϕ) = 1.
Damit können wir jetzt den Beweis der Eulerformel (exp(jϕ) = cos(ϕ) + j sin(ϕ)) in Angriff nehmen,
wobei wir uns wieder nur auf die Darstellung der Ideen beschränken und die Details ausblenden.
Beide Zahlen haben Betrag 1, und für kleine Winkel ϕ gilt exp(jϕ) ≈ 1 + jϕ ≈ cos(ϕ) + j sin(ϕ) (auf der
linken Seite, weil höhere Potenzen von ϕ viel kleiner sind, und auf der rechten Seite, weil cos(ϕ) ≈ 1,
sin(ϕ) ≈ ϕ). Durch geometrische Überlegungen am Einheitskreis ist es nicht schwierig, dies in der
π
folgenden Art zu präzisieren: Es gibt eine Konstante C so, dass für ϕ <
die Ungleichung
6
ϕ π
Arg(exp( jϕ)) − ϕ < C ⋅ ϕ2 gültig ist. Ist nun ϕ beliebig und die natürliche Zahl n so gross, dass
< ,
n 6
ϕ
ϕ
ϕ
ϕ
ϕ2
dann gilt Arg(exp( j )) − < C ⋅ 2 . Nun ist aber sowohl (exp( j ))n = exp( j ⋅ n) = exp( jϕ) (wegen
n
n
n
n
n
ϕ
ϕ
ϕ
ϕ
der Rechenregel (1)) wie auch (cos( ) + j sin( ))n = cos( ⋅ n) + j sin( ⋅ n) = cos( ϕ) + j sin( ϕ) (weil
n
n
n
n
ϕ
ϕ
ϕ
cos( ) + j sin( ) Winkel
hat und Winkel beim Multiplizieren addiert werden). Der Unterschied im
n
n
n
ϕ2
ϕ2
betragen. Durch
Winkel von exp(jϕ) und cos(ϕ) + j sin(ϕ) kann also höchstens C ⋅ 2 ⋅ n = C ⋅
n
n
Vergrössern von n kann man diese Schranke beliebig klein machen, d.h. exp(jϕ) und cos(ϕ) + j sin(ϕ)
haben tatsächlich den gleichen Winkel. Da sie auch beide Betrag 1 haben, sind sie gleich.
Wir können also von jetzt an ohne Verwechslungsgefahr ez statt exp(z) schreiben.
Als Nebenprodukt dieser Betrachtungen erhalten wir die aus der Analysis bekannten
ϕ 2 3 ϕ3
Reihendarstellungen von cos(ϕ) und sin(ϕ), nämlich indem wir in e jϕ = 1 + jϕ + j2
+j
+ ...
2!
3!
beachten, dass j2 = −1, j3 = −j, j4 = 1, j5 = j, …:
ϕ2 ϕ 4 ϕ6
+
−
+ ...
2!
4! 6!
ϕ 3 ϕ 5 ϕ7
sin( ϕ) = Im( e jϕ ) = ϕ −
+
−
+ ...
3! 5! 7!
cos( ϕ) = Re( e jϕ ) = 1 −
Betrachten wir zum Schluss noch eine beliebige komplexe Zahl z = x+yj, so können wir wegen (1)
schreiben: ez = ex·ejy , und da ex eine positive reelle Zahl ist, ist dies die Polarform von ez, d.h. es gilt
e z = e x = eRe( z ) ,
Arg(e z ) = y = Im( z) mod 2π
26
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
IV
Komplexwertige Funktionen
IV.1
Erweiterung der reellen Funktionen
Nachdem wir den Zahlenbereich erweitert haben, ist es angebracht, auch die gängigen Funktionen in
sinnvoller Art und Weise zu erweitern, d.h. so, dass Rechenregeln, die im Reellen gelten, auch im
Komplexen gültig bleiben. Dies gelingt, wie wir bereits bei der Wurzelfunktion gesehen haben, nicht
immer. Bei der Exponentialfunktion (mit Basis e) hingegen hat es geklappt.
Wie steht es mit den trigonometrischen Funktionen cos, sin und tan? Aus der Eulerformel erhalten
1
1
wir zunächst für reelle ϕ die Darstellungen cos( ϕ) = Re(e jϕ ) = (e jϕ + (e jϕ )*) = (e jϕ + e − jϕ ) und
2
2
1 jϕ
j jϕ
jϕ
jϕ
− jϕ
sin(ϕ) = Im( e ) = (e − (e )*) = − (e − e ) (oder auch die am Schluss des letzten Kapitels
2j
2
angegebenen Reihendarstellungen). Die rechten Seiten dieser Gleichungen sind aber auch für
komplexe Zahlen z anstelle von ϕ definiert, wir können sie daher als Definition für sin(z) und cos(z)
verwenden:
1
j
sin( z )
e jz − e − jz
cos( z) := (e jz + e − jz ) ,
sin( z) := − (e jz − e − jz ) ,
tan( z) :=
= − j jz
cos( z)
2
2
e + e − jz
Damit sind diese drei Funktionen erweitert, und man kann nachprüfen, dass alle vom Reellen her
vertrauten Rechenregeln weiterhin gelten. Wir zeigen als Beispiel das Additionstheorem des Cosinus:
1
j2
cos( z) cos( w ) − sin( z) sin( w ) = (e jz + e − jz )(e jw + e − jw ) − (e jz − e − jz )(e jw − e − jw ) =
4
4
1 jz
1
[( e + e − jz )(e jw + e − jw ) + (e jz − e − jz )(e jw − e − jw )] = [2e j( z + w ) + 2e − j( z + w ) ] = cos( z + w ) ,
4
4
wobei wir von der Rechenregel (1) der Exponentialfunktion Gebrauch gemacht haben.
Als nächstes versuchen wir den (natürlichen) Logarithmus zu definieren, wie im Reellen als
Umkehrfunktion der Exponentialfunktion, d.h. w = ln(z) müsste die einzige Lösung der Gleichung
ew = z sein. Diese bedeutet gemäss den Formeln am Ende des letzten Kapitels, dass eRe(w) = |z| und
Im(w) = Arg(z) mod 2π = Arg(z) + k·2π (k є Z), d.h. die Gleichung hat unendlich viele Lösungen, wenn
z ≠ 0, bzw. gar keine, wenn z = 0. Wenn wir nun (mit der willkürlichen Wahl k = 0) definieren
ln(z) := ln(|z|) + j Arg(z)
(für z ≠ 0)
(wobei zu beachten ist, dass |z| eine positive reelle Zahl ist, auf die die reelle Logarithmusfunktion
angewandt werden kann), dann ist damit nicht für die volle Exponentialfunktion eine Umkehrfunktion
definiert, sondern nur für deren Einschränkung auf den Bereich –π < Im(w) ≤ π (weil ja Arg(z) nur
Werte in diesem Bereich annehmen kann). Damit gelten die Regeln ln(z1·z2) = ln(z1) + ln(z2) und
ln(ez) = z nicht mehr allgemein (nur noch modulo 2πj). Beispiel: 0 = ln(1) = ln((−1)·(−1)) ≠
ln(−1) + ln(−1) = jπ + jπ. Die Logarithmusfunktion ist auch unstetig, nämlich bei den Punkten der
negativen reellen Achse; ihr Imaginärteil springt dort von –π auf π. Trotz dieser Unzulänglichkeiten ist
der komplexe Logarithmus eine nützliche Funktion. Er wird auch gebraucht, um weitere Funktionen
von R auf C zu erweitern, z.B. Potenzen:
a z := eln( a )⋅z
(a ≠ 0)
Die Regeln
az + w = az ⋅ aw ,
(a z )n = an⋅ z
(a ≠ 0, n ganz)
bleiben richtig, aber (a z ) w ≠ a z ⋅ w und (a ⋅ b)z ≠ a z ⋅ b z , im Allgemeinen. Beweisen Sie die richtigen
Regeln und finden Sie ein Gegenbeispiel für die falschen!
27
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
1
Wir haben a n = n a schon in Abschnitt III.2 definiert und wollen noch überprüfen, dass unsere neue
Definition damit kompatibel ist:
1
n
a
=e
ln( a )⋅
1
n
=
1
⋅(ln( a ) + j Arg( a ))
n
e
=
1
⋅ln( a )
n
e
1
⋅ j Arg( a )
n
⋅e
=
n
a ⋅e
j
Arg( a )
n
, in
Übereinstimmung mit III.2 (p. 21).
Die Erweiterung der Funktionen arccos, arcsin, arctan wird dem Leser als Übung überlassen.
IV.2
Komplexe Funktionen einer reellen Variablen, Ortskurven
In diesem Abschnitt geht es, grob gesagt, um Funktionen R → C , d.h. die Variable t darf nur reelle
Werte annehmen, der Funktionswert z(t) jedoch komplexe. Eine solche Funktion kann man durch ihre
Ortskurve veranschaulichen, d.h. die Menge der Punkte z(t), die man erhält, wenn t den ganzen
Definitionsbereich der Funktion durchläuft. (Dies ist nicht der Graph der Funktion!)
In der Elektrotechnik betrachtet man beispielsweise häufig die Impedanz einer Schaltung als Funktion
eines darin enthaltenen Widerstandes. Es ist dann sehr nützlich, wenn man geometrische
Informationen über die Ortskurve zur Verfügung hat.
v
x( t )⎤
Natürlich kann man statt z(t) = x(t) + j y(t) auch den Ortsvektor z( t ) = ⎡⎢
als Funktion von t
⎣ y( t )⎥⎦
r
betrachten (wir bezeichnen allgemein mit z den Ortsvektor der komplexen Zahl z) und erhält so eine
Parameterdarstellung der Ortskurve im Sinne der reellen Analysis. Der Vorteil der komplexen
Betrachtungsweise besteht darin, dass wir hier die komplexen Rechenoperationen und Funktionen
zur Verfügung haben, was für viele interessante Kurven sehr elegante Beschreibungen liefert.
Wir beginnen mit einigen Beispielen.
1)
z(t) = a + b t
(a, b є C fest, b ≠ 0)
Dies kennen Sie (in vektorieller Schreibweise) schon lange. Die Ortskurve ist eine Gerade; sie geht
r
durch a (für t = 0) und hat Richtungsvektor b .
2)
z( t ) = a + b ⋅ e jt
(a, b є C fest, b ≠ 0)
Der Punkt z(t) kreist mit Winkelgeschwindigkeit 1 (wenn man t als Zeit betrachtet) auf dem Kreis mit
Radius |b| um den Mittelpunkt a. Zur Zeit t = 0 ist er bei a + b.
3)
z( t ) = a + b ⋅ e ct
(a, b, c є C fest, b ≠ 0, Im(c) ≠ 0)
Wenn Re(c) = 0, ergibt sich der gleiche Kreis wie in
2), aber mit Winkelgeschwindigkeit Im(c)
durchlaufen. Wenn aber Re(c) = γ ≠ 0, erhalten wir
etwas Neues: z( t ) = a + b ⋅ e ct = a + b ⋅ e γt ⋅ e j Im( c )t ;
der Radius b ⋅ e γt wächst bzw. schrumpft während
des Umlaufens exponentiell, was eine Spirale ergibt,
genauer: eine logarithmische Spirale (weil der
Winkel proportional zum Logarithmus des Radius’
wächst). Als Beispiel sehen Sie in der
nebenstehenden Figur einen Ausschnitt aus der
Ortskurve von z(t) = e(0.1+j)t. Die Figur wurde mit
folgendem Matlab-Code erzeugt:
t=-20:0.1:10;
z=exp((0.1+j)*t);
plot(z); grid on
28
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
4)
z( t ) =
HS 2011 / baw2
1
t+j
Es ist z(0) = −j und für t → ±∞ gilt z(t) → 0. Mit Matlab-Hilfe kommt man rasch auf die Vermutung,
dass die Ortskurve ein Kreis mit Mittelpunkt −0.5 j und Radius 0.5 ist. Um dies zu überprüfen,
j
1
j
2 + j t − 1 1 j( t − j) 1 t − j 1
(beachten Sie, dass t−j
berechnen wir z( t ) − ( − ) =
+ =
=
=
j
=
2
t+j 2
2( t + j)
2 t+j
2 t+j 2
und t+j zueinan-der konjugiert sind, also den gleichen Betrag haben), d.h. z(t) hat Abstand 0.5 zu −0.5
j, liegt also auf besagtem Kreis. Dieser Kreis wird aber nur einmal durchlaufen, wobei der Nullpunkt
erst im Grenzwert für t → ±∞ erreicht wird. Man erkennt dies z.B. daran, dass
1
t−j
−1
für −∞ < t < ∞ monoton von 0 bis −1 und wieder zurück läuft.
Im( z( t )) = Im(
) = Im( 2
)= 2
t+j
t +1
t +1
Dieses letzte Beispiel ist schon eines, das für „elektrotechnische“ Ortskurven interessant ist.
Allgemeiner geht es hier häufig um Ortskurven von „gebrochen linearen“ Funktionen, d.h.
5)
z( t ) =
a +b⋅t
c + d⋅ t
(a, b, c, d є C fest; c, d nicht beide 0)
a b
+ ⋅ t , die Ortskurve also eine Gerade.
c c
a 1 b
1
Wenn c = 0, ist z( t ) = ⋅ + , die Ortskurve also wiederum eine Gerade, weil ja s := ebenfalls nur
d t d
t
b
reelle Werte durchläuft. Allerdings wird der Punkt
dieser Geraden nur im Grenzwert t → ±∞
d
erreicht. Von jetzt an setzen wir d ≠ 0 voraus und formen die Funktion wie folgt um (Polynomdivision):
a +b⋅t b
bc
1
b ad − bc
1
z( t ) =
= + (a − )
= +
⋅
. Wir setzen zur Abkürzung
2
c + d⋅ t d
d c + d⋅ t d
c/d+ t
d
Wenn d = 0, ist z( t ) =
α=
ad − bc
,
d2
β=
b
,
d
γ=
c
, also
d
z( t ) = β + α ⋅
1
γ+t
Ist α = 0, d.h. ad−bc = 0, dann besteht die Ortskurve nur aus dem Punkt β; wir setzen also von jetzt an
ad−bc ≠ 0 voraus.
1
als eine reelle Variable betrachten, wodurch die Ortskurve
Ist γ reell, so können wir s :=
γ+t
wiederum als Gerade erkannt ist.
Von nun an sei also γ nicht reell, d.h. Im(γ) ≠ 0. Wir formen die Funktion nochmals etwas um:
α
1
α
1
Re( γ ) + t
z( t ) = β +
⋅
= β+
⋅
, wobei s :=
als neue reelle Variable
Im( γ ) j + (Re( γ ) + t ) / Im( γ )
Im( γ ) j + s
Im( γ )
1
aufgefasst wird. Nun können wir schliessen, dass sich der Punkt
auf dem Kreis von Beispiel 4)
j+s
bewegt. Dann werden alle Punkte dieses Kreises mit
0 aus mit dem positiven Faktor
α
multipliziert. Dies bedeutet, dass sie von
Im(γ )
α
gestreckt (Beträge werden multipliziert!) und mit Drehwinkel
Im(γ )
α
) um 0 gedreht werden (Winkel werden addiert!). Dadurch entsteht wieder ein Kreis, ein
Im( γ )
„drehgestrecktes“ Bild des ursprünglichen Kreises. Zu den Punkten des neuen Kreises wird jetzt noch
β addiert, wodurch der Kreis nur noch verschoben wird. Die Situation ist in der nächsten Figur bildlich
festgehalten.
Arg(
29
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
β−j·α/Im(γ) (t = −Re(γ))
z(t)
˚
˚
HS 2011 / baw2
˚
Ortskurve von
1
z( t ) = β + α ⋅
γ+t
(Im(γ) ≠ 0)
Im
β−j/2·α/Im(γ)
−j·α/Im(γ)
β
(t → ±∞)
˚
˚−j/2·α/Im(γ)
Re
˚
˚ −j/2
˚−j (s = 0, d.h. t = −Re(γ))
Arg(α/Im(γ))
Der Mittelpunkt des Kreises ist β − j ⋅
α
α
, der Radius
.
2 Im( γ )
2 Im( γ )
Es lohnt sich, dies alles zusammenzufassen:
a +b⋅t
(a, b, c, d є C fest; c, d nicht beide 0) ist
c + d⋅ t
ein Punkt, falls ad−bc = 0, andernfalls
c
eine Gerade, falls c = 0 oder d = 0 oder
reell, andernfalls
d
α
α
ein Kreis mit Mittelpunkt m = β − j ⋅
und Radius r =
2 Im( γ )
2 Im( γ )
Die Ortskurve von z( t ) =
-
(wobei α =
ad − bc
b
c
, β= , γ= )
2
d
d
d
Wir fügen noch ein Beispiel aus der Elektrotechnik an: In einem seriellen RLC-Kreis mit
Wechselspannungsquelle U der Kreisfrequenz ω wird die Spannung mit dem Übertragungsfaktor
jωL
A=
R + jωL +
1
jωC
=
− ω2LC
1 − ω2LC + jωRC
auf die Spule (welche die Selbstinduktion L darstellt) übertragen. Wir interessieren uns nun für die
Ortskurve von A als Funktion von L, bei festen (positiven) Werten von ω, R, C, d.h. wir betrachten die
Funktion
A(L ) =
− ω2 C ⋅ L
1 + jωRC − ω2C ⋅ L
(L ≥ 0)
Dies ist tatsächlich eine gebrochen lineare Funktion wie in 5), mit a = 0, b = −ω2C = d, c = 1 + jωRC.
c 1 + jωRC
1
R
b
ad − bc ω2C(1 + jωRC) 1 + jωRC
=− 2 −j .
, β = = 1, γ = =
Wir berechnen α =
=
=
d
ω
d
− ω2C
ωC
d2
( ω2 C ) 2
ω2 C
30
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
α
1 + jωRC − ω
j2
1
1
1
,
= 1− j ⋅
⋅
=
1
+
+ j⋅
= + j⋅
2
2 Im( γ )
2R
2
2ωRC 2
2ωRC
ω C
den Radius benötigen wir nicht, da wir noch
wissen, dass A(0) = 0, womit wir den Kreis
Im
zeichnen können. Der Grenzwert von A(L) für
− ω2 C
= 1 . Der
L → ∞ ist lim
2
L → ∞ (1 + jωRC) / L − ω C
1
j⋅
zweite Schnittpunkt mit der imaginären Achse
ωRC
1
1
m
wird für L = 2 erreicht, weil dann der Nenner
j⋅
ω C
2ωRC
in A(L) Realteil 0 hat. Der zugehörige Punkt ist
(L→∞)
−1
1
j
(L
=
0)
0.5
1 Re
, in Übereinstimmung
=
A( 2 ) =
jωRC ωRC
ω C
mit der Figur. Natürlich hätte man die Ortskurve
j
auch aus diesen drei Punkten (0, 1,
)
ωRC
gewinnen können, wenn man einmal weiss, dass sie ein Kreis ist. Der gestrichelte Teil des Kreises
(im 4. Quadrant) entspricht negativen Werten von L, was in diesem Beispiel nicht vorkommt.
Das Zentrum des Kreises ist m = β − j ⋅
˚
˚
˚
˚
˚
Im nächsten Abschnitt werden wir weitere Methoden kennen lernen, um solche (kreisförmige)
Ortskurven qualitativ, ohne viel Rechnung, geometrisch zu lokalisieren.
Ableitung einer Funktion R → C
Wir werden dabei auch Schnittwinkel von Ortskurven untersuchen, worunter der Schnittwinkel der
Tangenten im Schnittpunkt zu verstehen ist. In der reellen Analysis wird gezeigt, dass die
v
v
⎡ x( t )⎤
⎡ x' ( t )⎤
, also z' ( t ) = ⎢
, einen
komponentenweise gebildete Ableitung einer Vektorfunktion z( t ) = ⎢
⎣ y( t )⎥⎦
⎣ y' ( t )⎥⎦
v
v
Tangentenvektor (im Punkt der Kurve mit Ortsvektor z( t ) ) darstellt, wenn z' ( t ) nicht der Nullvektor ist.
Wir übertragen dies auf unsere Situation: Für die Ableitung einer Funktion t → z(t) = x(t) + j y(t),
definiert als z'(t) := x'(t) + j y'(t), d.h. Realteil und Imaginärteil werden separat abgeleitet (diese sind
gewöhnliche reelle Funktionen), gelten die vom Reellen her gewohnten Ableitungsregeln; z.B. erhält
man für z(t) = ejt als Ableitung z'(t) = j·ejt. (Rechnen Sie dies mit Hilfe der Eulerformel nach!)
Dann gilt also
Falls z'(t) ≠ 0, ist der Ortsvektor von z'(t) (im Punkt z(t) eingezeichnet) ein Tangentenvektor an
die Ortskurve.
Im
z(t)
Tangentenvektor in z(t)
˚
Re
˚
z'(t)
31
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
IV.3
HS 2011 / baw2
Abbildungen der komplexen Ebene, insbesondere Inversion
Unter einer Abbildung der komplexen Ebene versteht man eine Funktion C → C, d.h. sowohl die
Variable z wie auch der Funktionswert w = f(z) können komplex sein. Wir nennen f(z) den Bildpunkt
von z.
Einfache Beispiele kann man direkt geometrisch verstehen, so etwa
1)
f(z) = z + b (b fest): Translation. Translationsvektor ist der Ortsvektor von b.
2)
f(z) = a·z (a fest): Drehstreckung mit Zentrum 0. Der Streckungsfaktor ist |a|; der Drehwinkel
Arg(a).
3)
f(z) = a·(z−c) + c: Drehstreckung mit Zentrum c.
4)
f(z) = z*: Spiegelung an der reellen Achse.
5)
f(z) = −z*: Spiegelung an der imaginären Achse.
Wie aber soll man die geometrischen Eigenschaften einer komplizierteren Funktion, wie etwa f(z) = ez,
anschaulich beschreiben? Man kann für geeignete Teilmengen F des Definitionsbereichs („Figur“) die
Menge f(F) := { f(z) | z є F } , die „Bildfigur“, bestimmen, um die Wirkung der Abbildung sichtbar zu
machen. Wählt man als Figur die Ortskurve einer Funktion t → z(t), dann ist die Bildfigur die Ortskurve
von t → f(z(t)).
Häufig nimmt man als Originalfigur ein Gitter bestehend aus Linien parallel zur reellen und zur
imaginären Achse, ein sogenanntes kartesisches Gitter. Wir erläutern das Vorgehen im Fall der
Exponentialfunktion f(z) = ez; meistens wird man jedoch Computerhilfe benötigen.
Eine zur reellen Achse parallele Gerade hat die Parameterdarstellung z(t) = t + j y (y fest), d.h. sie ist
Ortskurve dieser Funktion. Ihr Bild hat also die Parameterdarstellung w(t) = ez(t) = et·ejy. Der zweite
Faktor ist fest, mit Winkel y. Der erste Faktor (Betrag von w(t)) ist reell und variabel, nimmt aber nur
positive Werte an; er wächst exponentiell mit t = Re(z). Die Bildkurve ist also der von 0 ausgehende
Strahl (ohne 0) mit Richtungswinkel y.
Eine zur imaginären Achse parallele Gerade hat die Parameterdarstellung z(t) = x + j t (x fest); der
Bildpunkt w(t) = ex·ejt durchläuft einen Kreis mit Radius ex, und zwar unendlich oft, wenn wir für t alle
reellen Zahlen zulassen. Wir beschränken uns also in diesem zweiten Fall (Im(z) = t) besser auf den
Bereich −π < t ≤ π. Dies ist sowieso ratsam, da die Exponentialfunktion Periode 2πj hat:
ez+2πj = ez·e2πj = ez·1 = ez. Das hat ja zur Folge, dass das Bild des Bereichs π < Im(z) ≤ 3π genau das
gleiche ist wie das Bild des Bereichs −π < Im(z) ≤ π, etc.
Das Bild eines regelmässigen kartesischen Gitters im Bereich −π < Im(z) ≤ π besteht also aus von 0
ausgehenden Strahlen (mit regelmässigen Winkelabständen) und Kreisen mit Zentrum 0, deren
Radien exponentiell wachsen. In der Figur auf der nächsten Seite wird der Bereich −5 ≤ Re(z) ≤ 3,
−π ≤ Im(z) ≤ π abgebildet. Originallinie und Bildlinie sind jeweils mit der gleichen Farbe dargestellt. Die
Bildkreise der senkrechten Linien links in der z-Ebene (rot) sind so klein, dass sie in der w-Ebene
nicht sichtbar sind. Der grösste Kreis (in der Figur) hat Radius e3 ≈ 20, der kleinste e−5 ≈ 0.0067. Eine
Gittermasche in der z-Ebene wird in einen Kreisringsektor in der w-Ebene abgebildet.
Die Strahlen und Kreise des Bildes schneiden sich unter einem rechten Winkel, genau wie die
Gitterlinien im Original. Dies ist Ausdruck eines allgemeinen Sachverhalts, dem wir uns jetzt
zuwenden.
Winkeltreue und komplexe Differenzierbarkeit
Man sagt, eine Abbildung f sei winkeltreu im Punkt z0, wenn für je zwei Kurven, die sich in z0
schneiden, der Schnittwinkel der Bildkurven mit dem Schnittwinkel der Originalkurven übereinstimmt
(inklusive Vorzeichen, d.h. Drehsinn).
32
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
Abbildung z → w = ez; Bild des kartesischen Gitters
Eine Abbildung f heisst komplex differenzierbar in z0, wenn der Grenzwert
f ( z 0 + Δz ) − f ( z 0 )
f ' ( z 0 ) = lim
existiert. Die Definition stimmt also mit der aus der reellen Analysis
Δz
Δz → 0
bekannten überein. Der Unterschied besteht aber darin, dass man Δz auf ganz verschiedene Art
gegen 0 gehen lassen kann, z.B. auf einem Strahl, oder auf einer Spirale, oder …, und der Grenzwert
muss jedes Mal derselbe sein. So ist komplexe Differenzierbarkeit eine viel einschneidendere Bedingung als reelle Differenzierbarkeit nach x (= Re(z)) und y (= Im(z)). Trotzdem sind die gängigen
Funktionen, wie sie in Abschnitt IV.1 eingeführt wurden, komplex differenzierbar, mit den gleichen
Rechenregeln wie im Reellen. Z.B. gilt für f(z) = zn (n ganz): f'(z) = n·zn−1; die Ableitung des Sinus ist
der Cosinus, etc. Auch die Beweise verlaufen ganz analog.
33
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
Als Beispiel einer nicht komplex differenzierbaren Funktion erwähnen wir die Konjugation, f(z) = z*.
f ( z 0 + Δz ) − f ( z 0 ) ( Δz) *
=
= e − j⋅2 Arg( Δz ) , und je nachdem, wie man Δz
Der Differenzenquotient lautet
Δz
Δz
gegen 0 gehen lässt, ergeben sich verschiedene Grenzwerte oder gar keiner.
Das Überraschende ist nun, dass komplexe Differenzierbarkeit Winkeltreue impliziert, genauer:
Eine in z0 komplex differenzierbare Abbildung f ist dort auch winkeltreu, falls f'(z0) ≠ 0.
Dies wollen wir begründen. Denken wir uns zwei Ortskurven, gegeben durch t → z1(t) und t → z2(t),
die sich in z0 schneiden, mit z1(0) = z0 = z2(0). (Man kann es immer so einrichten.) Der Schnittwinkel
z ' (0 )
) . Die
ist der Winkel zwischen den Tangentenvektoren, also α = Arg( z 2 ' (0)) − Arg( z1' (0)) = Arg( 2
z 1 ' (0 )
Bildkurven sind gegeben durch t →w1(t) = f( z1(t)) und t → w2(t) = f( z2(t)), ihr Schnittwinkel also durch
w ' (0 )
β = Arg( 2
) . Nun ist aber w 1' (0) = f ' ( z1(0)) ⋅ z1' (0) = f ' ( z 0 ) ⋅ z1' (0) und analog
w 1 ' (0 )
w 2 ' (0) = f ' ( z 0 ) ⋅ z 2 ' (0) , denn die Kettenregel gilt auch für komplexe Funktionen (Beweis wie im
f ' ( z 0 ) ⋅ z 2 ' (0 )
w 2 ' (0 )
z ' (0 )
) = Arg(
) = Arg( 2
) = α . Beachten Sie, dass
w 1 ' (0 )
f ' ( z 0 ) ⋅ z1 ' (0 )
z1' (0 )
diese Rechnung nur funktioniert, wenn f'(z0) ≠ 0.
Reellen). Damit wird β = Arg(
Betrachten wir nochmals die Konjugation, d.h. die Spiegelung an der reellen Achse. Diese ist nicht
komplex differenzierbar, aber auch nicht winkeltreu im obigen Sinne, denn sie kehrt die Orientierung
der Winkel um: β = −α.
Die Inversion
1
von Interesse, z. B. für den Übergang von
z
Impedanzen zu Admittanzen und umgekehrt. Nach dem oben Gesagten ist dies eine winkeltreue
Abbildung (ausser bei 0, wo sie gar nicht definiert ist). Wir werden aber noch eine weitere interessante
Eigenschaft („Kreistreue“) kennen lernen. Zunächst merken wir uns einige einfache Eigenschaften:
In der Elektrotechnik ist die Inversion z → w = f(z) =
w =
1
,
z
Arg(w) = −Arg(z)
wenn |z| = 1, dann w = z*
wenn z → 0, dann |w| → ∞ ,
wenn |z| → ∞, dann w → 0
Die Einheitskreislinie wird also auf sich selber abgebildet (an der reellen Achse gespiegelt), das
1
nennt man auch
Innere des Einheitskreises auf das Äussere, und umgekehrt. Die Abbildung z →
z*
Spiegelung am Einheitskreis (die beiden Zahlen liegen auf dem gleichen Strahl von 0 aus, das
Produkt ihrer Beträge ist 1). Inversion kann also aufgefasst werden als Kombination von Spiegelung
an der reellen Achse und Spiegelung am Einheitskreis.
Wir interessieren uns nun für die Bilder von Geraden und Kreisen. Jede(r) solche lässt sich als
a+b⋅t
darstellen, wie aus Abschnitt
Ortskurve einer linearen oder gebrochen linearen Funktion z( t ) =
c + d⋅ t
c + d⋅t
IV.2 hervorgeht. Die Bildkurve bei Inversion ist dann Ortskurve von w( t ) =
, also wieder ein
a+b⋅t
Kreis oder eine Gerade. Es kann aber sein, dass das Bild eines Kreises eine Gerade ist und
umgekehrt. Fassen wir eine Gerade als „Kreis“ mit unendlich grossem Radius auf, um die
34
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
Formulierung zu vereinfachen! D.h. wir verstehen unter „Kreis“ einen Kreis oder eine Gerade. Damit
können wir sagen:
Die Inversion ist „Kreis“-treu, d.h. das Bild eines „Kreises“ ist wieder ein „Kreis“.
Ob die Bildkurve ein Kreis oder eine Gerade ist, lässt sich leicht feststellen:
Wenn der Original-„Kreis“ durch 0 geht, ist die Bildkurve eine Gerade, sonst ein Kreis.
Im ersten Fall kann man nämlich auf der Originalkurve gegen 0 gehen, auf der Bildkurve also gegen
∞, und darum kann diese nur eine Gerade sein. Im zweiten Fall gibt es auf der Originalkurve einen
Punkt mit kleinstem Abstand zu 0 (man fälle von 0 aus das Lot auf den „Kreis“), auf der Bildkurve also
einen mit grösstem Abstand zu 0. Auf einer Geraden gibt es aber keinen solchen, deshalb muss die
Bildkurve ein Kreis sein.
Wir erläutern jetzt anhand eines Beispiels, wie diese Überlegungen angewendet werden können. Es
1
1
1
+
die Admittanz eines Wechselstromkreises und Z(C) =
die
sei Y(C) =
1
R1 + jωL
Y( C )
R2 +
jωC
Impedanz, wobei R1, R2, L und ω fest sind, jedoch C variabel (alle positiv). Man beschreibe die
Ortskurven von Z(C) und Y(C). Natürlich könnte man die Methode von Abschnitt IV.2 anwenden, was
1
jedoch einige Rechnung erfordert. Wir gehen statt dessen so vor, dass wir mit Z1(C) := R 2 +
jωC
1
beginnen (die Variable kommt sonst nirgends vor), dann invertieren, dann schieben (um
,
R1 + jωL
was Y(C) ergibt), dann wieder invertieren (um Z(C) zu bekommen). Um die Übersicht zu behalten,
verwenden wir dabei zwei komplexe Ebenen, eine Impedanz-Ebene und eine Admittanz-Ebene.
Im(Z)
Im(Y)
Inversion
(C→0)
R1+ jωL
˚
1
1
1
+
R1 + jωL R 2
(C→∞)
R2
(C→∞)
˚ ˚
Z(C)
Y1(C)
˚
Re(Z)
(C→0)
Z1(C)
(C→∞) Y(C)
(C→0)
1
R1 + jωL
˚
1
R2
˚
Re(Y)
(C→∞)
1
1
+
R1 + jωL R 2
˚
(C→0)
Die Ortskurve von Z1(C) ist eine Gerade durch R2 senkrecht zur reellen Achse, genauer gesagt nur
der Teil, der im 4. Quadranten liegt. Das inverse Bild davon, d.h. von Y1(C) = 1/Z1(C), ist also Teil
eines Kreises durch 0 und 1/R2, der die reelle Achse rechtwinklig (Winkeltreue!) schneidet, also auch
seinen Mittelpunkt (1/(2R2)) auf dieser hat, und zwar der Teil im 1. Quadranten, also ein Halbkreis.
1
verschoben, also in Richtung des 4. Quadranten, und dies ist
Dieser Halbkreis wird jetzt um
R1 + jωL
schon die Ortskurve von Y(C). Um wie viel verschoben wird, hängt natürlich von R1 und ωL ab; wenn
1
der Punkt R1+ jωL in der Impedanzebene gegeben ist, kann man sein inverses Bild
in der
R1 + jωL
Admittanzebene lokalisieren, indem man das Vorzeichen des Winkels wechselt und das Betragsverhältnis bezüglich eines andern Punktes, z.B. R2, umkehrt (1/|R1+ jωL| : 1/R2 = R2 : |R1+ jωL|). Der
35
BFH-TI Abteilungen EKT und M
Lineare Algebra und Geometrie 1
HS 2011 / baw2
schwierigste Schritt ist nun die Inversion dieses verschobenen Halbkreises, um die Ortskurve von
Z(C) zu bekommen. Diese muss ein Teil eines Kreises sein, der durch R1+ jωL geht (für C → 0). Um
diesen Kreis zu lokalisieren, kann man die Tangenten von 0 aus an den Kreis von Y(C) legen. Diese
Strahlen gehen bei Inversion in die Strahlen mit (im Vorzeichen) umgekehrten Winkeln über, und die
Strahlen werden in umgekehrter Richtung durchlaufen. Durch die beiden Tangenten und den Punkt
R1+ jωL ist der Kreis festgelegt, wenn man noch beachtet, dass R1+ jωL weiter von 0 entfernt sein
muss als die beiden Berührpunkte der Tangenten, weil es im inversen Bild gerade umgekehrt ist. Hat
1
1
einzeichnen,
=
man den Kreis, so kann man darauf den Punkt Z(C → ∞ ) =
1
1
Y( C → ∞ )
+
R1 + jωL R 2
indem man wieder entsprechende Strahlen betrachtet. Der gesuchte Punkt ist der innere Schnittpunkt
des Strahls mit dem Kreis. Die gesuchte Ortskurve von Z(C) ist jetzt der Teil des Kreises zwischen
den beiden bekannten Punkten Z(C→0) und Z(C→∞) mit der untern Tangente, i.A. kein Halbkreis
mehr.
Die Smith Chart
Zum Abschluss erwähnen wir noch ein weiteres Beispiel einer winkel- und kreistreuen Abbildung:
z −1
z→w=
. Diese kommt z.B. in der Leitungstheorie vor. Das Bild des kartesischen Koordinatenz +1
gitters (für Re(z) ≥ 0) wird Smith Chart genannt (s. Abbildung). Die imaginäre Achse wird auf den
Einheitskreis abgebildet, der Bereich Re(z) > 0 auf das Innere des Einheitskreises. Die Bilder der
vertikalen Gitterlinien (Re(z) = konstant) sind Kreise durch 1, die symmetrisch zur reellen Achse
liegen, und die Bilder der horizontalen Gitterlinien (Im(z) = konstant) sind Kreise, die die reelle Achse
bei 1 berühren. Wir überlassen die Begründung dieser Fakten dem Leser als Übungsaufgabe.
Beschriftet man diese Kreise in der Smith Chart mit den entsprechenden Werten von Re(z) bzw.
Im(z), so kann man für einen gegebenen Punkt z das Bild w = u + v j in der Smith Chart eintragen und
seine Koordinaten u, v ablesen. So ist z.B. das Bild von z = 0.5 + j ungefähr w = 0.08 + 0.62 j.
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
36