Harmonische Schwingungen und komplexe Zahlen
Werbung

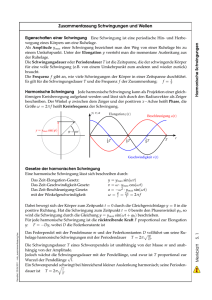
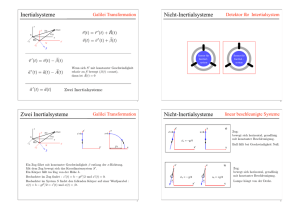
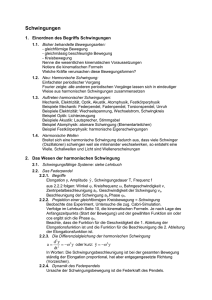
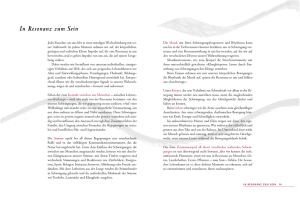
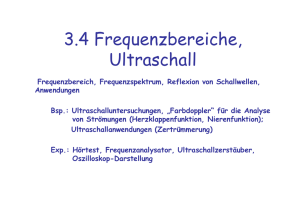
202 c Daniel Bättig 8 Harmonische Schwingungen und komplexe Zahlen ⃝ Heft 8 Tabelle 8.1 Ort eines Fahrzeugs, berechnet aus dem Ortsvektor s = s(t) Harmonische Schwingungen und komplexe Zahlen Zeit (in s) 0,0 0,5 1,0 1,5 2,0 2,5 3,0 3,5 4,0 4,5 5,0 x-Position (in m) 0,0 0,479 0,841 0,997 0,909 0,598 0,141 -0,351 -0,757 -0,978 -0,959 y-Position (in m) 0,0 0,125 0,500 1,125 2,000 3,125 4,500 6,125 8,000 10,125 12,500 B 10 Zusammenfassung Wechselströme in elektrischen Netzwerken, Schwingungen von Objekten und Spektroskopie von komplexen Molekülgruppen sind Phänomene, die Ingenieurinnen und Ingenieure interessieren. Um die Phänomene zu beschreiben, benötigt man mathematische Modelle: die Sinusschwingung – auch harmonische Schwingung genannt – und komplexe Zahlen. In diesem Kapitel werden beide Konzepte vorgestellt. 8.1 Ableiten bei Vektoren, Weg- und Geschwindigkeitsvektor Spaltenvektoren mit zwei oder drei Komponenten spielen in der Physik eine Rolle, um Kräfte oder Geschwindigkeiten zu beschreiben. Solche Kräfte können von der Zeit t abhängen, wie etwa die Kraft F gegeben durch ⎛ ⎞ 4 kN s−1 · t F = F(t) = ⎝ 3 kN ⎠ 2 kN s−2 · t 2 Man definiert die Ableitung dF/dt (oder Änderungsrate) eines solchen Vektors nach t, indem man die Komponenten des Vektors einzeln ableitet. Beim gegebenem Vektor ist also ⎞ ⎛ 4 kN s−1 dF ⎝ = 0 kN s−1 ⎠ dt 4 kN s−2 · t Die zweite Komponente von F ist konstant. Daher ist die zweite Komponente der Ableitung von F nach t null. Beispiel 8.1 (Weg und Geschwindigkeit in der Ebene und im Raum). Der Ort eines Fahrzeugs, dass sich in der xy-Ebene oder in einem drei-dimensionalen Koordinatensystem bewegt, kann mit der Ortsvektor s = s(t) charakterisiert werden. Die 201 Abb. 8.1 Zurückgelegter Weg s = s(t) eines Fahrzeugs: A ist Startpunkt, B ist Endpunkt 4 0 v(2) s(2) A −1 0 1 Spitze des Ortsvektors bezeichnet die Position des Fahrzeugs. Ist etwa % & 1 m · sint s = s(t) = für 0 s ≤ t ≤ 5 s 0,5 m s−2 · t 2 so ist der Startpunkt s(0 s) = (0 | 0) m und der Endpunkt s(5 s) = (−0,96 | 12,5) m. Die Position des Fahrzeugs lässt mit einer Wertetabelle wie in Tab. 8.1 darstellen. Man kann auch den zurückgelegten Weg (eine Kurve in der Ebene) visualisieren, indem man die Punkte aus der Wertetabelle darstellt und durch kleine Geradenstücke verbindet. Am schnellsten geht dies mit Computerprogrammen wie MATLAB oder Julia. Hier die Befehle mit MATLAB dazu, wenn man 10 000 Punkte als Wertetabelle wählt: matlab> t = linspace(0,5,10000); matlab> xPosition = sin(t); yPosition = 0.5*t.ˆ2; matlab> plot(xPosition,yPosition) Mit Julia lauten die Eingaben: julia> julia> julia> julia> t = linspace(0,5,10000); xPosition = sin(t); yPosition = 0.5*t.ˆ2; using Gadfly; plot(x=xPosition,y=yPosition, Geom.line(preserve_order=true)) Mit einem Taschenrechner können solche Kurven mit ParametricPlot gezeichnet werden. Abbildung 8.1 zeigt den entstandenen Weg. Der Geschwindigkeitsvektor des Fahrzeugs zum Zeitpunkt t ist die Ableitung des Ortsvektors s = s(t): % & ds 1 m · cost = v = v(t) = 1 m s−2 · t dt 8.1 Ableiten bei Vektoren, Weg- und Geschwindigkeitsvektor 203 204 c Daniel Bättig 8 Harmonische Schwingungen und komplexe Zahlen ⃝ y Dies ist ein ortsgebundener Vektor. Der Anfangspunkt des Vektor ist jeweils die Spitze des Ortsvektors s = s(t). Abbildung 8.1 zeigt die Situation für den Zeitpunkt t = 2 s. Der Geschwindigkeitsvektor liegt jeweils tangential an der Wegkurve. Die Norm des Geschwindigkeitsvektors nennt man auch die Geschwindigkeit v = v(t). Sie beträgt ' v = v(t) = ||v(t)|| = (1 m · cos(t))2 + (1 m s−2 · t)2 Zum Zeitpunkt t = 2 s ist sie v = 2,043 m/s. Die kinetische Energie Ekin eines Körpers mit Masse m und dem Geschwindigkeitsvektor c ist mit einem Skalarprodukt berechenbar. Man hat A s(0) α (t) ϕ s(t) x 0 Abb. 8.2 Drehbewegung eines Zeigers der Länge A mit konstanter Winkelgeschwindigkeit ω : α (t) = ω · t + ϕ y −A −A 0 A A 1 Ekin = · m · v • v 2 Will man die Leistung dEkin /dt bestimmen, so muss man also ein Skalarprodukt von Vektoren ableiten. Sind a und b zwei Spaltenvektoren mit zwei Komponenten so ist %% & % && d d d a1 (t) b (t) • 1 = (a1 (t) · b1(t) + a2(t) · b2 (t)) (a • b) = a2 (t) b2 (t) dt dt dt Mit der Produktregel erhält man d (a • b) = a′1 (t) · b1 (t) + a1(t) · b′1(t) + a′2(t) · b2 (t) + a2(t) · b′2(t) dt Fasst man den ersten und dritten, sowie den zweiten und vierten Summanden zusammen erhält man: Theorem 8.1 (Ableiten eines Skalarprodukts). Die Produktregel gilt auch beim Ableiten eines Skalarprodukts: d da db (a • b) = •b+a• dt dt dt Die Leistung dEkin /dt ist daher ( ) d 1 dEkin 1 = · m · (v • v) = · m · v′ • v + v • v′ = m · v • v′ = m · v • a dt 2 dt 2 Dabei ist a der Beschleunigungsvektor. Der nächste Abschnitt befasst sich mit einem Punkt, der sich auf einem Kreis bewegt. t t0 Abb. 8.3 Die y-Koordinate des drehenden Zeigers: ein Auf- und Ab, das eine harmonische Schwingung darstellt. T −A 8.2 Drehbewegung und harmonische Schwingung Abbildung 8.2 zeigt im Gegenuhrzeigersinn und auf dem Einheitskreis drehenden Punkt oder Zeiger. Der Zeiger hat Länge A. Zum Zeitpunkt t = 0 beträgt sein Winkel zur x-Achse ϕ . Der Winkel α = α (t) zur x-Achse zum Zeitpunkt t beträgt α = α (t) = ω · t + ϕ In dieser Formel sind ω und ϕ Winkel in Bogenmaß, also dimensionslose Zahlen. Die Formel besagt, dass sich der Zeiger mit einer konstanten Winkelgeschwindigkeit dα /dt = ω im Gegenuhrzeigersinn bewegt. Die y-Koordinate y = y(t) des Endpunktes des Zeigers bewegt sich damit auf und ab. Sie lautet mit der Definition (siehe Abb. 2.6) der Sinusfunktion: y = y(t) = A · sin(ω · t + ϕ ) (8.1) Abbildung 8.3 zeigt den Graph der Auslenkung y = y(t) in Funktion der Zeit t ≥ 0. Man sagt, dass y = y(t) eine harmonische Schwingung ist. Eine harmonische Schwingung ist charakterisiert durch die Gleichung (8.1) und damit durch die Amplitude A, durch die Kreisfrequenz ω und den Nullphasenwinkel ϕ . Die drei Größen 8.2 Drehbewegung und harmonische Schwingung 205 206 c Daniel Bättig 8 Harmonische Schwingungen und komplexe Zahlen ⃝ y y Z1 + Z2 Z2 0,5 x t Abb. 8.4 Zwei harmonische Schwingungen 2·π 4·π lassen sich sehr einfach aus dem Zeigerdiagramm bestimmen. Man kann sie auch aus dem Graphen der Schwingung (siehe Abb. 8.3) über die Schwingungsdauer T und den Punkt t0 bestimmen. Der Zeiger bewegt sich mit einer Winkelgeschwindigkeit von ω . Eine volle Umdrehung des Zeigers entspricht einem Winkel von 2 · π . Also ist ω · T = 2 · π . Weiter ist der Zeitpunkt t0 in Abb. 8.3 so gelegt, der Zeiger in diesem Moment auf der positiven x-Achse liegt. Also ist α = α (t) = ω · t + ϕ = 0 (oder ein Vielfaches von 2 · π ). Man erhält damit T= 2π , ω t0 = − ϕ ω Den Kehrwert der Schwingungsdauer nennt man die Frequenz: f = 1/T . Zusammengefasst hat man: Theorem 8.2. Eine harmonische Schwingung y(t) = A · sin(ω · t + ϕ ) lässt sich im Zeigerdiagramm durch einen im mathematisch positiven Sinn mit der Winkelgeschwindigkeit ω rotierenden Zeiger der Länge A darstellen. Zum Zeitpunkt t = 0 befindet sich der Zeiger in einer Position, die durch den Nullphasenwinkel ϕ festgelegt ist. Harmonische Schwingungen werden damit über einen Vektor Z – den Zeiger – und die Zahl ω codiert. Ist ω < 0, so läuft der Zeiger im Uhrzeigersinn. Der Zeiger zum Zeitpunkt t = 0 nennt man den Nullzeiger der harmonischen Schwingung. Wenn verschiedene Kräfte aus ein schwingendes System wirken, werden die auftretenden Schwingungen überlagert. Abbildung 8.4 zeigt zwei harmonische Schwingungen y = y1 (t) (schwarze Linie) und y = y2 (t) (graue Linie) mit y1 (t) = sin(t + π /18), y2 (t) = 1,5 · sin(t + π /2) Beide Schwingungen haben die gleich Kreisfrequenz 1 s−1 . Überlagert man die beiden Schwingungen, erhält man y1 (t) + y2 (t). Um dies auszurechnen, ist es nicht praktisch mit den obigen Schwingungsgleichungen zu arbeiten. Sinusfunktionen können nämlich nur mühsam mit Hilfe von Additionstheoremen addiert werden. Z1 Abb. 8.5 Die Nullzeiger der beiden harmonischen Schwingungen aus Abb. 8.4 und Addition der beiden Nullzeiger Einfacher ist es mit den zugehörigen Zeigern zu rechnen. Abbildung 8.5 zeigt die beiden Nullzeiger Z1 und Z2 . Man hat Z1 = [1, ∠ π /18], Z2 = [1,5, ∠ π /2] Man addiert nun die beiden Nullzeiger Z1 und Z2 . Die Auslenkung der Überlagerung zum Zeitpunkt t = 0 ist die y-Komponente von Z1 + Z2 . Dieses Verfahren lässt sich für jeden Zeitpunkt t anwenden. Die beiden Zeiger drehen aber gleich schnell. Daher dreht das Parallelogramm in Abb. 8.4 mit der gleichen Winkelgeschwindigkeit mit! Die Überlagerung der beiden harmonischen Schwingungen ist deshalb wieder eine harmonische Schwingung mit Kreisfrequenz ω = 1 s−1 ! Der Nullzeiger Z der Überlagerung ist Z = Z1 + Z2 = [1, ∠ π /18] + [1,5, ∠ π /2] = [1,9418, ∠ 1,0389] Dieser Zeiger hat eine Länge von 1,9418. Der Winkel zur x-Achse beträgt 1,0389. Daher ist y1 (t) + y2(t) = 1,9418 · sin(t + 1,0389) eine harmonische Schwingung mit Amplitude 1,9418 und Nullphase 1,0389 (≈ 59,5◦). Abbildung 8.6 zeigt das Resultat. Die Konsequenz aus den Überlegungen am Zeigerdiagramm ist Theorem 8.3. Die Überlagerung zweier harmonischen Schwingungen y1 (t) = A1 · sin(ω ·t + ϕ1 ) und y2 (t) = A2 ·sin(ω ·t + ϕ2 ) mit gleicher Kreisfrequenz ω ist wieder eine harmonische Schwingung: y1 (t) + y2(t) = A · sin(ω · t + ϕ ) Der Nullzeiger Z der Überlagerung lautet Z = Z1 + Z2 : [A, ∠ ϕ ] = [A1 , ∠ ϕ1 ] + [A2, ∠ ϕ2 ] 8.3 Komplexe Zahlen 207 c Daniel Bättig 8 Harmonische Schwingungen und komplexe Zahlen ⃝ 208 z y i = (0 | 1) 0,5 1 = (1 | 0) x t Abb. 8.6 Addition (gestrichelte Linie) zweier harmonische Schwingungen 2·π Abb. 8.8 Eine komplexe Zahl z mit Realteil x und Imaginärteil y 4·π Abb. 8.9 Die komplexen Zahlen i und 1 y 0,5 t Abb. 8.7 Überlagerung zweier harmonischer Schwingungen y1 (t) = sint und y2 (t) = sin(3t), die nicht die gleiche Frequenz haben 2·π 4·π Die Überlegungen am Zeigerdiagramm zeigen auch, dass die Überlagerung zweier nicht gleich frequenter harmonischer Schwingungen (z.B. y1 (t) = sint und y2 (t) = sin(3t)) in der Regel keine harmonische Schwingung mehr ist. Abbildung 8.7 zeigt dies ebenfalls. Ein Punkt in der Ebene ist auch durch den Endpunkt eines Ortsvektors bestimmt. Man visualisiert daher komplexe Zahlen durch solche Vektoren und nennt sie dann Zeiger. Abbildung 8.8 zeigt eine komplexe Zahl dargestellt als Punkt. Komplexe Zahlen liegen in der xy-Ebene, die man in diesem Zusammenhang die gaußsche Zahlenebene nennt. Weiter nennt man x = ℜz = Re z den Realteil von z und y = ℑz = Im z den Imaginärteil von z. So hat die Zahl z = (2 | − 4), den Realteil 2 und den Imaginärteil −4. Zwei komplexe Zahlen nennt man gleich, wenn ihre Real- und Imaginärteile gleich sind. Den Punkt (0 | 1) bezeichnet man mit i. Diese komplexe Zahl heisst imaginäre Einheit. Komplexe Zahlen der Form (x | 0) schreibt man kurz als x, also (x | 0) = x (siehe Abb. 8.9). Addiert werden zwei komplexe Zahlen, indem man die zugehörigen Ortsvektoren addiert. Man hat also z1 + z2 = (x1 | y1 ) + (x2 | y2 ) = (x1 + x2 | y1 + y2 ) Die zweite wichtige Rechenart für komplexe Zahlen ist die Multiplikation. Sie wird wie folgt definiert: 8.3 Komplexe Zahlen In Bereichen der Technik sind reelle Zahlen nicht praktisch, um Phänomene aus der Physik und Chemie zu beschreiben. Werden beispielsweise zwei gleichfrequente harmonische Schwingungen überlagert, so ist es schwierig Sinusfunktionen zu addieren. Bei elektrischen Netzwerken möchte man das ohmsche Gesetz U = R · I für den Gleichstrom auf Situationen übertragen, wo Wechselströme, Kondensatoren und Spulen vorhanden sind. Mit komplexen Zahlen lassen sich solche Situationen meistern. Komplexe Zahlen werden in diesem Abschnitt definiert und es wird gezeigt, wie man mit ihnen rechnet. Man definiert: Definition 8.1. Eine komplexe Zahl z ist ein Punkt in der xy-Ebene, also ein geordnetes Paar (x | y) von reellen Zahlen. Definition 8.2. Multipliziert man die imaginäre Einheit i mit sich selbst, entsteht die Zahl −1: i2 = i · i = (−1 | 0) · (0 | − 1) = (−1 | 0) = −1 Man multipliziert zwei komplexe Zahlen z1 und z2 , indem man die üblichen Rechneregeln aus den reellen Zahlen (Kommutativ-, Assoziativ- und Distributivgesetz) beibehält und – wenn nötig – die obige Zusatzregel für die Multiplikation von i · i benutzt. Mit dieser Definition lässt sich beispielsweise die Zahl (0 | 4) als 4 · i schreiben. Weiter ist (3 | 4) = (3 | 0) + (0 | 4) = 3 + 4 · i Man hat daher allgemein für eine komplexe Zahl z 8.3 Komplexe Zahlen 209 z = (x | y) = x + y · i c Daniel Bättig 8 Harmonische Schwingungen und komplexe Zahlen ⃝ 210 (8.2) z z r Man nennt die Schreibweise x + y · i die kartesische Darstellung einer komplexen Zahl. Mit dieser Schreibweise sind der Real- und Imaginärteil der komplexen Zahl schnell ablesbar und der Zeiger einfach visualisierbar. ϕ Beispiel 8.2 (Erste Rechenbeispiele). Man betrachtet die beiden komplexen Zahlen z1 = (8 | 3) = 8 + 3 · i und z∗ z1 = (−4 | 2) = −4 + 2 · i Die Definition der Addition und Multiplikation, besagt, dass die üblichen Rechenregeln zu reellen Zahlen gelten sollen. Also ist Abb. 8.10 Komplexe Zahl z und konjugiert komplexe Zahl z∗ Abb. 8.11 Komplexe Zahl z als Zeiger: Angabe von ϕ und r z1 + z2 = (8 + 3 · i) + (−4 + 2 · i) = 4 + 5 · i Die Summe ist also der Punkt (4 | 5). Weiter ist – man multipliziert mit dem Distributivgesetz aus –: z1 · z2 = (8 + 3 · i) · (−4 + 2 · i) = −32 − 12 · i + 16 · i + 6 · i2 = −32 − 4 · i + 6 · i2 Mit der Rechenregel i2 = −1 erhält man z1 · z2 = −32 + 4 · i − 6 = −38 + 4 · i Dies ist der Punkt (−38 | 4). Schwieriger ist es, die Division z2 /z1 zu rechnen. Hier hilft ein Trick mit geschicktem Erweitern des Bruchs: −4 + 2 · i −4 + 2 · i 8 − 3 · i (−4 + 2 · i) · (8 − 3 · i) = · = 8+3·i 8+3·i 8−3·i 64 − 9 · i2 Man multipliziert nun den Zähler aus. Im Nenner wird mit der Regel i2 = −1 zu 64 + 9 = 73. Man erhält: −4 + 2 · i −26 + 28 · i −26 28 = = + · i = −0,356 + 0,384 · i 8+3·i 73 73 73 Man nennt die Zahl z∗ , gegeben durch z∗ = x − y · i, die zu z = x + y · i konjugierte Zahl (siehe Abb. 8.10). So ist also (4 + 7 · i)∗ = 4 − 7 · i Die Konsequenz dieser Rechnungen ist: Theorem 8.4. In der Form z = x + y · i sind die Addition und die Multiplikation dasselbe Rechnen wie mit reellen Zahlen mit der Zusatzregel i2 = −1. Die kartesische Form erlaubt es, komplexe Zahlen schnell zu visualisieren, von Hand zu addieren und subtrahieren und zu multiplizieren: !. Schwieriger ist es von Hand zwei komplexe Zahlen in kartesischer Form zu dividieren. Hier muss der Bruch geschickt mit der konjugierten Zahl des Nenners erweitert werden: ". Mit MATLAB oder mit Julia kann man mit komplexen Zahlen rechnen. Der Realteil einer komplexen Zahl z bestimmt man mit real(z), den Imaginärteil mit imag(z) und die komplex konjugierte Zahl mit dem Befehl conj(z). Mit MATLAB sieht dies so aus matlab> z1 = 8 + 3i; z2 = -4 + 2i; matlab> real(z1) ans = 8 matlab> conj(z1) ans = 8.0000 - 3.0000i matlab> z1 + z2 ans = 4.0000 + 5.0000i matlab> z1 * z2 ans = -38.0000 + 4.0000i matlab> z2 / z1 ans = -0.3562 + 0.3836i Mit Julia gibt man komplexe Zahl wie folgt ein julia> julia> 8 julia> -38 z1 = 8 + 3im; z2 = -4 + 2im; real(z1) z1*z2 + 4im Eine oft benutzte Zahl ist 1/i. Man erhält mit der Gleichung i2 = −1: 1 = −i i 8.3 Komplexe Zahlen 211 212 c Daniel Bättig 8 Harmonische Schwingungen und komplexe Zahlen ⃝ In der Technik, vor allem bei Anwendungen zu Schwingungen und elektrischen Netzwerken, braucht man komplexen Zahlen um Zeiger zu modellieren. Zeiger sind Orstvektoren in der xy-Ebene, eindeutig bestimmt durch ihre Länge und ihren Winkel zur x-Achse: 2 · ei·3·π /4 3 · ei·π /4 Definition 8.3. Ist z eine komplexe Zahl, dargestellt durch einen Zeiger, so nennt man die Polarkoordinaten ϕ und r des Zeigers z das Argument und den Betrag von z. Abbildung 8.11 zeigt die Situation. Den Betrag r von z – also der Abstand der Zahl zum Nullpunkt – schreibt man wie bei einer reellen Zahl als |z|. Das Argument einer komplexen Zahl notiert man oft mit arg(z). Mit MATLAB und mit Julia berechnet man das Argument einer komplexen Zahl z mit angle(z) und den Betrag mit abs(z). Mit MATLAB lässt sich ein Zeiger z mit Es zeigt sich nun, dass sich zweite Faktor mit einer Exponentialfunktion ausdrücken lässt! Nach Abschnitt 5.10 ist die Exponentialfunktion u(ϕ ) = exp(a · ϕ ) definiert als die Funktion mit du = a · u(ϕ ) und u(0) = 1 dϕ Betrachtet man g(ϕ ) = cos ϕ + i · sin ϕ , so ist g(0) = 1. Weiter ist dg (ϕ ) = − sin ϕ + i · cos ϕ = i · (cos ϕ + i · sin ϕ ) = i · g(ϕ ) du Also muss g(ϕ ) eine Exponentialfunktion sein: g(ϕ ) = exp(i · ϕ ). Dies nennt man die Euler-Formel exp(i · ϕ ) = cos ϕ + i · sin ϕ (8.3) Zusammengefasst hat man: Theorem 8.5. Ein Zeiger z mit Argument ϕ und Betrag r lässt sich schreiben als z = r · exp(i · ϕ ) = r · ei·ϕ Dies nennt man die Polarform oder Zeigerform einer komplexen Zahl. Bei der Polarform einer komplexen Zahl sind das Argument und der Betrag der Zahl schnell ablesbar und der Zeiger einfach visualisierbar. Die Polarform ist also für Zeiger ebenso praktisch wie die kartesische Form für Punkte. Abbildung 8.12 zeigt mehrere Zeiger mit ihrer Zeigerform. Beispiel 8.3 (Rechenbeispiele mit der Polarform). Die Zahl 1 + i hat Argument π /4 √ und Abstand 2 von Nullpunkt. Dies lässt sich mit einer Skizze schnell verifizieren. Daher ist √ 1*+,+ i = * 2 ·+, ei·π /4- Punktform matlab> compass(z) zeichnen. Ist z = x + y · i erhält man mit Hilfe des Betrags r und des Arguments ϕ von z: z = x + i · y = r cos ϕ + i · r sin ϕ = r · (cos ϕ + i · sin ϕ ) 3 · e−i·π /2 Abb. 8.12 Mehrere komplexe Zahlen, dargestellt als Zeiger 2 · ei·π /3 Zeigerform Die komplexe Zahl hat Betrag 2 und Argument π /3. Ihr Zeiger hat also einen Winkel von 60◦ zur x-Achse und eine Länge von 2. Die Zahl i (oder der Punkt (0 | 1)) hat einen Winkel von 90◦ zur x-Achse. Sie ist eine Einheit vom Nullpunkt entfernt. Daher ist i = 1 · ei·π /2 = ei·π /2 Dies ist die Zeigerform von i. Weiter ist e2π ·i = 1 und ei·π = −1. In der Polarform lassen sich komplexe Zahl schnell multiplizieren, dividieren und potenzieren. Ist z1 = 2 · eiπ /4 und z2 = 3 · e−iπ /6 so ist z1 · z2 = 2 · eiπ /4 · 3 · e−iπ /6 = 6 · ei·(π /4−π /6) = 6 · ei·π /12 Analog ist 2 2eiπ /4 = · ei·(π /4+π /6) = 0,667 · ei·5π /12 3e−iπ /6 3 Die Zahl hat einen Winkel von 180◦/12 = 15◦ zur x-Achse. Ihr Abstand zum Nullpunkt beträgt 2/3. Um (1 + i)16 von Hand zu rechnen, format man die Zahl 1 + i zuerst in Polarform um. Man erhält .√ /16 (1 + i)16 = 2 · ei·π /4 = 28 · ei·4π Dies ist der Zeiger mit Winkel 4π zur x-Achse und Betrag 28 = 256. Damit ist (1 + i)16 = 256. Die obigen Rechnungen zeigen, dass die Polarform es ermöglicht, Zeiger schnell zu visualisieren, von Hand zu multiplizieren, zu dividieren und zu multiplizieren. Schwieriger ist es von Hand zwei Zeiger zu addieren. 8.4 Komplexe Zahlen: grafisch addieren und multiplizieren y 213 y z1 · z2 z1 + z2 z2 z2 ϕ2 x ϕ1 c Daniel Bättig 8 Harmonische Schwingungen und komplexe Zahlen ⃝ 8.5 Erste Anwendungen der komplexen Zahlen In diesem Abschnitt wird dargestellt, dass komplexe Zahlen benutzt werden können, um mit harmonischen Schwingungen zu rechnen und Nullstellen von Polynomen zu nennen. Eine harmonische Schwingung, gegeben durch die Gleichung ϕ1 + ϕ2 z1 214 z1 x y(t) = A · sin(ω · t + ϕ ) Abb. 8.13 Addition von Zeigern (8.5) ist durch einen Zeiger Z mit Länge A festgelegt. Der Zeiger dreht sich dabei mit Winkelgeschwindigkeit ω (siehe Abb. 8.2 und zum Zeitpunkt t = 0 hat er einen Winkel von ϕ zur x-Achse. Der Zeiger Z kann als komplexe Zahl y(t) aufgefasst werden. In Zeigerform geschrieben hat man damit Abb. 8.14 Multiplikation von Zeigern Taschenrechner sind in der Lage mit komplexen Zahlen zu rechnen. Resultate können – je nach Anwendungszweck – in kartesischer Form oder als Zeiger dargestellt werden. y(t) = A · ei·(ω ·t+ϕ ) (8.6) Man nennt dies auch die komplexe Darstellung einer harmonischen Schwingung. Der Imaginärteil dieses Zeigers ist die eigentliche Schwingung y(t): 8.4 Komplexe Zahlen: grafisch addieren und multiplizieren Auslenkung: Komplexe Zahlen lassen sich in kartesischer Form und in Polarform gut rechnen. Wie bei Vektoren kann man zudem die Grundrechenoperationen – hier die Addition und die Multiplikation – auch grafisch durchführen. Die Addition zweier komplexer Zahlen z1 und z2 entspricht der Addition von Zeigern oder Ortsvektoren. Dies veranschaulicht Abb. 8.13. Die Multiplikation lässt sich grafisch verstehen, wenn man die beiden komplexen Zahlen z1 und z2 in Zeigerform schreibt: z1 = r1 · ei·ϕ1 , z2 = r2 · ei·ϕ2 Dann ist z1 · z2 = r1 · r2 · ei·(ϕ1 +ϕ2 ) Die Beträge der beiden komplexen Zahlen werden daher multipliziert und die Argumente werden addiert. Dies lässt sich so schreiben: | z1 · z2 |=| z1 | · | z2 |, arg(z1 · z2 ) = arg(z1 ) + arg(z2 ) (8.4) Abbildung 8.14 zeigt grafisch das entstandene Resultat. Eine Konsequenz aus der Rechnung ist: Multipliziert man einen Zeiger z mit der imaginären Einheit i, so wird der Zeiger z um 90◦ im Gegenuhrzeigersinn gedreht. y(t) = ℑy(t) Der Nullzeiger ist die Position des Zeigers zum Zeitpunkt t = 0: Nullzeiger y(0) = A · ei·ϕ Mit der komplexen Darstellung einer harmonischen Schwingung, einer Exponentialfunktion lässt sich besonders gut rechnen. Die Darstellung der Schwingung mit Gleichung (8.5), einer Sinusfunktion, ist unpraktisch. Dies illustriert das folgende Rechnung: Sind y1 (t) und y2 (t) zwei harmonische Schwingungen mit der gleichen Kreisfrequenz ω , so lauten sie in komplexer Form: y1 (t) = A1 · ei·(ω ·t+ϕ1 ) , y2 (t) = A2 · ei·(ω ·t+ϕ2 ) Die Überlagerung der beiden Schwingung lässt sich mit dieser Polarform berechnen: . / y1 (t) + y2 (t) = A1 · ei·(ω ·t+ϕ1 ) + A2 · ei·(ω ·t+ϕ2 ) = A1 · ei·ϕ1 + A2 · ei·ϕ2 ·ei·ω ·t * +, =z Der Term in der Klammer ist eine Summe z von zwei Zeigern. Diese Summe z kann man in Polarform schreiben: z = A · ei·ϕ Daraus folgt y1 (t) + y2 (t) = A · ei·ϕ · ei·ω ·t = A · ei·(ω ·t+ϕ ) 8.5 Erste Anwendungen der komplexen Zahlen 215 c Daniel Bättig 8 Harmonische Schwingungen und komplexe Zahlen ⃝ 216 Entstanden ist wiederum eine harmonische Schwingung. Damit hat man das Folgende: Theorem 8.6. Die Überlagerung zweier gleich frequenter harmonischer Schwingungen, gegeben durch y1 (t) = A1 · sin(w ·t + ϕ1 ) und y2 (t) = A2 · sin(w ·t + ϕ2 ), ist wieder eine harmonische Schwingung: y1 (t) + y2 (t) = A · sin(w · t + ϕ ) mit 1× 1× 1× 3× 1× A · eiϕ = A1 · eiϕ1 + A2 · eiϕ2 1× 1× Hier ein Beispiel dazu: Beispiel 8.4 (Überlagerung zweier harmonischer Schwingungen). Die zwei Schwingungen y1 (t) = 3 · sin(t + 2) und y2 (t) = 10 · sin(t + 4) haben die gleiche Kreisfrequenz. Die Überlagerung ist der beiden Schwingungen ist daher auch harmonisch mit Amplitude A und Phase ϕ . Diese lauten: A · ei·ϕ = 3 · ei·2 + 10 · ei·4 = 9,16 · e−2,58·i Abb. 8.15 Vier Nullstellen des Polynoms p4 (x), alle einfach 4.0000 - 3.0000i 2.0000 + 0.0000i -1.0000 + 0.0000i Also ist y1 (t) + y2 (t) = 9,16 · sin(t − 2,58). In komplexer Form geschrieben, lautet das Resultat 9,16 · ei·(t−2,58). Mit Julia erhält man: Polynome spielen in der Technik einer Rolle, um Punkte zu interpolieren (siehe Abschnitt 5.5. Pole von rationale Funktionen – also Nullstellen von Polynomen – spielen eine Rolle um zu analysieren, wie dynamische Systeme wie Luftseilbahnen, Autos, Brücken oder elektrische Netze auf Einflüsse von außen (Luftbewegungen, Erschütterungen) reagieren. Das Polynom p2 (x) = 1 + x2 lässt sich mit komplexen Zahlen faktorisieren: julia> julia> 4.0 + 4.0 2.0 + -1.0 + (x − i) · (x + i) = x2 − i2 = 1 + x2 using Polynomials; p4 = Poly([-50; -9; 31; -9; 1]); roots(p4) 3.0im 3.0im 0.0im 0.0im Das Polynom hat also die vier Nullstellen 4 + 3 · i, 4 − 3 · i, 2 und −1 (siehe Abb. 8.15). Man hat also Es besitzt damit zwei komplexe Nullstellen: i und −i. Man kann allgemein zeigen, dass ein Polynom p(z) vom Grad n p(z) = a0 + a1 · z + a2 · z2 + · · · + an · zn sich dank komplexen Zahlen in lineare Faktoren zerlegen lässt: p(z) = an (z − z1 )(z − z2 ) · · · (z − zn ) Dabei sind z1 , z2 , . . . , zn die Nullstellen von p. Man nennt dies den Fundamentalsatz der Algebra. Um die Nullstellen zu berechnen, verwendet man Programme. Mit MATLAB oder mit Julia ist dies der Befehl roots(): Beispiel 8.5 (Komplexe Nullstellen). Gegeben ist das Polynom p4 (x) = −50 − 9x + 31x2 − 9x3 + x4 . Die Nullstellen, ermittelt mit MATLAB, lauten matlab> p4 = [1; -9; 31; -9; -50]; ans = 4.0000 + 3.0000i Abb. 8.16 Nullstellen des Polynoms p5 (x) roots(p4) p4 (x) = −50 − 9x+ 31x2 − 9x3 + x4 = (x− (4 + 3 ·i))·(x− (4 − 3 ·i))·(x− 2)·(x+ 1) Man sagt, dass die vier Nullstellen alle einfach sind, da jeder Faktor nur einmal erscheint. Die fünf Nullstellen des Polynoms p5 (x) = −16 + 40x − 44x2 + 26x3 − 8x4 + x5 sind: matlab> p5 ans = 1.0000 + 1.0000 2.0000 + 2.0000 + 2.0000 - = [1; -8; 26; -44; 40; -16]; roots(p5) 1.0000i 1.0000i 0.0000i 0.0000i 0.0000i Die Nullstellen sind also 1 + i, 1 − i und die Zahl 2 (dreifach). Man hat deshalb: p5 (x) = −16 + 40x − 44x2 + 26x3 − 8x4 + x5 = (x − (1 + i)) · (x − (1 − i)) · (x − 2)3 8.6 Ortskurven 217 218 c Daniel Bättig 8 Harmonische Schwingungen und komplexe Zahlen ⃝ Eingang: x(t) ω = −0,8 s−1 System ω = π /8 Antwort: y(t) Abb. 8.17 Eine Radaufhängung mit einem McPherson-Federbein (aus [1]) ω = 0,5 s−1 ω = π /2 Abb. 8.18 Schematische Darstellung von Eingang und Antwort eines Systems ω = 0,8 s−1 ω = 1 s−1 Die Nullstelle x = 2 ist dreifach. Abbildung 8.16 visualisiert die drei Nullstellen mit ihrer Vielfachheit. Beachten Sie aber – dies wurde schon in Theorem 5.1 erwähnt –, dass der Algorithmus roots() nummerisch instabil ist! Die berechneten Nullstellen können also schlecht sein. Abb. 8.19 Ortskurve ei·ω ·2 s mit Nullzeigern Abb. 8.20 Ortskurve eines angeregten Pendels Beispiel 8.6 (Eine einfache Ortskurve). Ein System habe die Ortskurve Nullzeiger(ω ) = 1 · ei·ω ·2 s 8.6 Ortskurven In der Mechanik und in der Elektrotechnik betrachtet man Systeme wie Luftseilbahnen, Fahrzeugfederungen und elektrische Schaltkreise (siehe Abb. 8.17). Sie werden durch eine harmonische Schwingungen x = x(t) = sin(ω ·t) angeregt oder gestört“. ” Das System bewegt sich: y = y(t). Man nennt die Störfunktion x(t) auch die Eingangsgröße des Systems und die Funktion y(t) auch das Antwortsignal oder die Ausgangsgröße des Systems. Abbildung 8.18 zeigt die Situation schematisch. Oft reagiert das angeregte System mit einer harmonischen Schwingung mit einer Kreisfrequenz, die gleich der Anregungskreisfrequenz ω von x = x(t) ist. Es ist also – in komplexer Form geschrieben –: y = y(t) = A · e i·(ω ·t+ϕ ) Die Amplitude A und die Phase ϕ der Schwingung – und damit der Nullzeiger des Antwortsignals – hängen von der Anregungskreisfrequenz ω ab: A = A(ω ), ϕ = ϕ (ω ). Für jedes ω erhält man somit einen Nullzeiger: Nullzeiger(ω ) = A(ω ) · ei·ϕ (ω ) Verbindet man die Endpunkte der Zeiger erhält man eine Kurve in der Ebene. Man spricht von einer Ortskurve. Der Graph der Ortskurve nennt man ein NyquistDiagramm. Es stellt also die Antwort eines Systems (den Nullzeiger) in Funktion der angeregten Kreisfrequenz dar. für angelegte Kreisfrequenzen 0 ≤ ω ≤ π . Das System reagiert also so, dass für jede angelegte Kreisfrequenz ω , die Amplitude A = 1 bleibt. Die Phase gegenüber der angelegten Schwingung hängt von ω ab und beträgt ω ·2 s. Stellt man die Nullzeiger in Funktion von ω dar, durchlaufen sie einen Kreis mit Mittelpunkt (0 | 0) und Radius eins. Abbildung 8.19 zeigt die Ortskurve. Mit MATLAB kann man die Ortskurve wie folgt grafisch darstellen: matlab> omega = linspace(0, pi, 1000); matlab> nullzeiger = exp(1i*omega*2); matlab> plot(nullzeiger) Mit Julia stellt man die Ortskurve wie folgt dar: julia> julia> julia> julia> omega = linspace(0, pi, 1000); nullzeiger = exp(1im*omega*2); using Gadfly; plot(x=real(nullzeiger),y=imag(nullzeiger), Geom.line(preserve_order=true)) Beispiel 8.7 (Nyquist-Diagramm eines Pendels). Ein Pendel wird mit der harmonischen Schwingung x = x(t) = sin(ω · t) angeregt. Dabei kann ω eine positive oder negative Zahl sein. Das Pendel reagiert mit einer Schwingung y = y(t) mit Kreisfrequenz ω . Der Nullzeiger dieser Schwingung laute Nullzeiger(ω ) = 2 (i · ω )2 + 0,4 · i · ω + 1 8.6 Ortskurven 219 Der Nenner ist ein Polynom vom Grad zwei. Mit MATLAB lässt sich diese Ortskurve für −100 s−1 ≤ ω ≤ 100 s−1 darstellen: matlab> omega = linspace(-100, 100, 10000); matlab> nzeiger = 2./((1i*omega).ˆ2+0.4i*omega+1); matlab> plot(nzeiger) Abbildung 8.20 zeigt den Graph der Ortskurve. Der Punkt auf der Ortskurve, der am weitesten vom Nullpunkt ist, zeigt die maximale erzeugbare Amplitude des Pendels an. Mit MATLAB berechnet sich dies wie folgt: matlab> [AmplitudeMax, index] = max(abs(nzeiger)); matlab> AmplitudeMax AmplitudeMax = 5.1031 matlab> omega(index ) ans = -0.9591 Die maximal erzeugbare Amplitude des Pendels lautet 5,10. Erzeugt wird sie bei einer Kreisfrequenz von −0,9591 s−1 (und bei 0,9591 s−1 ). 220 c Daniel Bättig 8 Harmonische Schwingungen und komplexe Zahlen ⃝ Körper mit einer Horizontal- vH und Vertikalgeschwindigkeit vV von einem Punkt mit Koordinaten (x0 | y0 ) so gilt für die Flugbahn, wenn man den Luftwiderstand nicht berücksichtigt: x(t) = x0 + vH · t, 1 y(t) = − · g · t 2 + vV · t + y0 2 (a) Zeichnen Sie die Flugbahn für verschiedene Abwurfgeschwindigkeiten, wenn x0 = 0 m und y0 = 10 m. (b) Berechnen Sie den Zeitpunkt t, zudem der Körper den Boden berührt, wenn x0 = 0 m und y0 = 10 m ist. (c) Berechnen Sie den Geschwindigkeitsvektor v = v(t) zum Zeitpunkt t. (d) Wie lautet der Beschleunigungsvektor a = a(t)? Überrascht Sie das Resultat? 8.4. Bestimmen Sie bei den folgenden harmonischen Schwingungen Amplitude, Kreisfrequenz, Nullphasenwinkel, Frequenz und Schwingungsdauer (Einheiten: Zeit t in Sekunden, Auslenkungen in Zentimetern): y1 (t) = 15 sin(8t) y3 (t) = 3 sin(6π t + 2) y2 (t) = 2 sin(8t − π /36) y4 (t) = 12 cos(7t + π /3) Zeichnen Sie die Nullzeiger der Schwingungen. Aufgaben 8.1. Ein Fahrzeug in der xy-Ebene ist zum Zeitpunkt t mit 0 ≤ t ≤ 1 im Punkt P = P(t) = (x(t) | y(t)) x(t) = t − t 2 , y(t) = t + t 2 (a) Skizzieren Sie die Fahrkurve von Hand mit Hilfe einer Wertetabelle. (b) Zeichnen Sie die Fahrkurve mit MATLAB oder mit Julia. (c) Berechnen Sie den Geschwindigkeitsvektor und den Beschleunigungsvektor. Zeichnen Sie den Ortsvektor, den Geschwindigkeitsvektor und den Beschleunigungsvektor zum Zeitpunkt t = 0,5 in die Graphik der Fahrkurve. 8.2. Ein Fahrzeug fährt auf einer Kurve im Raum. Die Position P = P(t) = (x | y | z) des Fahrzeugs zum Zeitpunkt t ist – für 0 ≤ t ≤ 11 – gegeben durch x(t) = 2t cos(t), y(t) = 2t sin(t), z(t) = t 2 (a) Zeichnen Sie die Kurve mit MATLAB oder mit Julia. (b) Berechnen Sie den Geschwindigkeitsvektor und den Beschleunigungsvektor des Fahrzeugs. (c) Bestimmen Sie die räumliche Steigung des Fahrzeugs zum Zeitpunkt t. 8.3. In einem kartesischen Koordinatensystem entspricht die x-Achse dem flachen Boden und die y-Achse misst den vertikalen Abstand zum Boden. Wirft man einen 8.5. (a) Stellen Sie die beiden harmonischen Schwingungen f (t) = 2 sin(2t + π /2) und g(t) = 3 sin(2t) grafisch dar. Zeichnen Sie auch ihre Nullzeiger. (b) Berechnen Sie die Amplitude, die Frequenz und den Nullphasenwinkel der Überlagerung f (t) + g(t). Zeichnen Sie die so entstandene Schwingung. (c) Zwei gleich frequente Wechselspannungen U1 = 40 sin(314t + 0,1) und U2 = 70 cos(314t) (U1 bzw. U2 in Volt, t in Sekunden) werden überlagert. Welche Wechselspannung entsteht? 8.6. Gegeben sind die beiden harmonischen Schwingungen y1 (t) = 5 · sin(2t + 3) und y2 (t) = 5,1 · sin(2t − 0,3). Wie lauten die Amplitude, die Phase und die Kreisfrequenz der Überlagerung y1 (t) + y2(t)? 8.7. Gegeben ist eine harmonische Schwingung f (t) = 7, /!2 · sin(4π t). Bestimmen Sie die Amplitude und den Nullphasenwinkel einer gleich frequenten Schwingung g(t) so, dass die Überlagerung f (t) + g(t) die Amplitude 22,5 und eine Phasenverschiebung von π /3 gegenüber der Schwingung f (t) aufweist. 8.8. Bestimmen Sie die Phasenverschiebung zwischen zwei gleich frequenten harmonischen Schwingungen gleicher Amplitude so, dass ihre Summe eine harmonische Schwingung derselben Amplitude ergibt. Wie gross sind dabei die Phasenverschiebungen zwischen der Summe und den beiden Teilschwingungen? (Tipp: Arbeiten Sie mit dem Zeigerdiagramm. Sie müssen nichts rechnen!) 8.9. Abbildung 8.21 zeigt den Graphen einer harmonischen Schwingung y = y(t). Die Funktionsgleichung von y = y(t) lautet 8.6 Ortskurven 221 222 c Daniel Bättig 8 Harmonische Schwingungen und komplexe Zahlen ⃝ y y 2 1 t Abb. 8.21 Eine harmonische Schwingung y = y(t) (Zeiteinheit t in Sekunden, Auslenkung y in cm) x −2 2 4 Abb. 8.22 Vier Punkte und drei Zeiger y(t) = A · sin(ω · t + ϕ ) Wie lauten A, ω und ϕ ? Zeichnen Sie zudem den Nullzeiger der Schwingung. 8.10. Von zwei gleich frequenten harmonischen Schwingungen y1 (t), y2 (t) und ihrer Summe z(t) = y1 (t) + y2(t) kennt man die folgenden Angaben: Kreisfrequenz Amplitude Nullphasenwinkel y1 (t) 2π 5 π /4 6 y2 (t) 2π z(t) 2π 7 zwischen 0 und π Berechnen Sie die fehlenden Nullphasenwinkel von y2 (t) und z(t). (Tipp: Machen Sie eine Skizze mit Zeigern!) 8.11. Die Summe zweier gleich frequenter harmonischer Schwingungen y1 (t) und y2 (t) hat Amplitude 10 cm und Schwingungsdauer 5 s. Der Nullphasenwinkel von y1 beträgt π /6, der Nullphasenwinkel von y2 beträgt 3π /4 und die Amplituden von y1 und y2 verhalten sich wie 2:1. Bestimmen Sie die Amplituden von y1 und y2 , und berechnen Sie den Nullphasenwinkel von y1 + y2 . 8.12. Berechnen Sie von Hand und kontrollieren Sie mit einem Taschenrechner, mit MATLAB oder mit Julia: (1 + 2i) · (2 + 3i) [(4 − 5i) + (2 + 3i)]2 (4 − 5i) · (2 + i) i3 i4 i5 i6 Berechnen Sie die folgenden Brüche von Hand 17 4+i 1 1 − 2i 4 + 3i 3 − 4i 8.13. SchreibenSie die folgenden komplexen Zahlen in Zeigerform auf: √ 1−i − 2 + 2i 5 + 5i 1 + 3i Kontrollieren Sie die Resultate mit einem Taschenrechner, mit MATLAB oder mit Julia. −2 2 8.14. Es sei z = a + b · i. Geben Sie Formeln für z2 , z3 , z + z∗ , z − z∗ , z · z∗ und 1/z. 8.15. Zeichnen Sie die Zeiger 2 · e3π i , 7 · eiπ /4 und 2 · ei·7π /2 und bestimmen Sie daraus ihre Real- und Imaginärteile. 8.16. (a) Zeichnen Sie die Zeiger eiπ , 2eiπ /4 und 2e−π i . (b) Man überlagert zwei gleich frequente Wechselspannungen U1 = 50ei·(300t+1) und U2 = 80ei·(300t+50) (t in Sekunden, Spannungen in Volt). Bestimmen Sie mit einem Taschenrechner, mit MATLAB oder mit Julia die Frequenz, die Amplitude und den Nullphasenwinkel der entstandenen Wechselspannung. 8.17. Bestimmen Sie mit einem Rechner alle komplexen Lösungen z der Gleichungen z2 + 0,1z + 100 = 0, z2 − 2z + 2 = 0 und z2 = −16. Stellen Sie die Lösungen grafisch dar. 8.18. Berechnen Sie mit MATLAB oder mit Julia alle Nullstellen der Polynome p1 (x) = x5 − 8x4 + 10x3 + 44x2 − 155x + 300 p2 (x) = x5 − 7x4 + 23x3 − 45x2 + 48x − 20 p3 (x) = x3 + 3x2 + 3x + 1 p4 (x) = x10 + 1 Zeichnen Sie die Nullstellen als Punkte in der komplexen Ebene und geben Sie ihre Vielfachheiten an. 8.19. Abbildung 8.22 zeigt verschiedene Punkte und Zeiger. Wie lauten die Punkte und Zeiger? 8.20. (a) Gegeben ist die Ortskurve Nullzeiger(ω ) = 2ei·ω − i Wenn ω alle reellen Zahlen durchläuft, so bewegt sich Nullzeiger(ω ) auf einer Kurve in der komplexen Ebene. Überlegen Sie sich, wie diese Kurve aussieht. (b) Dieselbe Frage für Literaturverzeichnis 223 Nullzeiger(ω ) = 5 (i · ω )2 + 0,1 · i · ω + 5 mit −20 ≤ ω ≤ 20. Dies ist schwieriger als Aufgabe (a). Erstellen Sie deshalb nur einen MATLAB- oder Julia-Plot der Kurve! Finden Sie den Punkt auf der Ortskurve, der am weitesten vom Nullpunkt entfernt ist. 8.21. Die Admittanz Y ( komplexer Leitwert“) eines Serieschwingkreises ist ” 1 Y= 1 R + iω L + iω C (a) Geben Sie eine Formel für den Betrag A von Y an. (b) Es seien R, L und C fest, aber ω ≥ 0 variabel. Der obige Betrag A wird damit zu einer Funktion von ω . Wie gross ist A in den Extremfällen ω = 0 und ω = ∞? (c) Es sei L = 100 µH und C = 0,01µF. Erstellen Sie mit MATLAB oder mit Julia den Graphen von A(ω ) in den drei Fällen R = 20 Ω, 60 Ω und 200 Ω. Für welchen Wert von ω ist A(ω ) maximal? Literaturverzeichnis 1. Tröster, F.: Steuerungs- und Regelungstechnik für Ingenieure. Oldenburg Wissenschaftsverlag GmbH (2005)