AB6 – Trassierung
Werbung

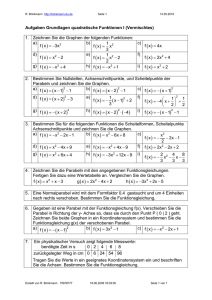
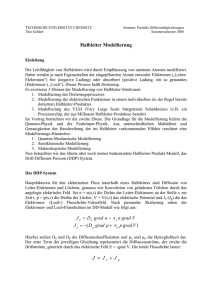
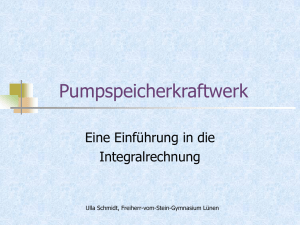
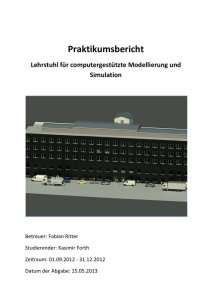
AB6 – Trassierung Der Begriff Trassierung beschreibt das Entwerfen und Festlegen der Linienführung eines Landverkehrsweges bzw. einer Trasse in Lage, Höhe und Querschnitt. Dazu werden mit Hilfe von verschiedenen Entwurfsmethoden Trassierungselemente zu einer räumlichen Linie zusammengefügt. Diese räumliche Linie muss nicht nur fahrdynamischen und sicherheitsbezogenen Gesichtspunkten genügen, sondern sich auch gut in die Landschaft einfügen und möglichst geringe Massenbewegungen oder Kunstbauwerke erzeugen (Wirtschaftlichkeit). Wir werden Verfahren kennenlernen, um die Trassierung von Straßen zu modellieren. Dabei greifen wir auf Kenntnisse über ganzrationale Funktionen aus Jahrgang 11 zurück. Ein Autobahnkreuz ist ein planfreier Knotenpunkt zweier Autobahnen. „Planfrei“ heißt dabei, dass sich die Autobahnen nicht in der derselben Ebene kreuzen, also unter- bzw. übereinander hergeführt werden. Die folgenden Abbildungen zeigen vier verschiedene Bauformen in vereinfachter typisierter Darstellung. Turbine Kleeblatt Malteser Windmühle a) Diskutiere die vier dargestellten Varianten hinsichtlich der Kriterien „Platzbedarf“, „mögliche Geschwindigkeiten beim Autobahnwechsel“ und „Kosten durch aufwändige oder viele Brücken". Trassenstück III 2. Winkelhalbierende Trassenstück I Trassenstück II Die oben abgebildete Kurve beschreibe die Linksabbiegung in einem Überwurf-Kreuz. Vereinfachend nehmen wir an, dass das Kreuz rechtwinklig ist und die gesamte Trasse in drei Teile zerlegt werden kann, wobei der mittlere Teil ein Viertelkreis mit Radius r ist. Ziel: Gesucht ist eine ganzrationale Funktion, die Trassenstück I beschreibt. In den Punkten A und B ist diese Kurve mit der Fahrbahn der Ausgangs-Autobahn (x-Achse) und dem Kreisbogen II (Trassenstück II) verbunden. Aus nachvollziehbaren Gründen sollte sich Trassenstück I in A lückenlos an die Ausgangsautobahn anschließen. Ebenso muss Trassenstück I ohne Sprung in Trassenstück II übergehen. Man nennt solche Übergänge sprungfrei bzw. stetig. Zusätzlich fordert man, dass sich in diesen Punkten kein Steigungssprung ergeben soll, damit das Lenkrad nicht plötzlich „herumgerissen“ werden muss. Die beiden sich treffenden Kurven sollen also im Übergangspunkt die gleiche Steigung besitzen. Übergänge, die im Übergangspunkt die gleiche Steigung haben, nennt man knickfrei oder glatt bzw. differenzierbar. Schließlich verlangt man noch, dass A ein Wendepunkt sein soll – das glättet den Übergang. Übergänge, die im Übergangspunkt auch die gleiche „Krümmung“ haben, nennt man krümmungsruckfrei bzw. zweimal differenzierbar. Merke: Zwei Graphen von Funktionen f und g heißen im Übergangspunkt P(a/b) sprungfrei bzw. stetig, falls f(a) = g(a). knickfrei bzw. glatt bzw. differenzierbar, falls f´(a) = g´(a). krümmungsruckfrei bzw. zweimal differenzierbar, falls f´´(a) = g´´(a). b) Gib jeweils ein Beispiel für einen nicht sprungfreien, einen sprungfreien aber nicht knickfreien sowie einen sprung- und knickfreien aber nicht krümmungsruckfreien Übergang an. c) Skizziere die Situation in einem Koordinatensystem. d) Begründe, dass sich der Viertelkreis im Kurventeil II durch die Funktion k r mit der Funktionsgleichung k r (x) = −√r 2 − x 2 und 0 ≤ x ≤ r beschreiben lässt. [Tipp: Satz des Pythagoras] e) Markiere die Bereiche, wo das Trassenstück I links- bzw. rechtsgekrümmt ist und begründe, warum Trassenstück I durch eine ganzrationale Funktion mindestens vierten Grades beschrieben wird. Gib die Anzahl der Bedingungen an, die zur Bestimmung dieser Funktion notwendig sind. f) Ermittle in Abhängigkeit von den beiden Parametern r (Radius des Viertelkreises) und t (Übergangsstellen von der ersten Autobahn zur Überwurftrasse) die Bedingungen zur Bestimmung der ganzrationalen Funktion fr,t vierten Grades. g) Begründe, warum die erste Autobahn (x-Achse) in jedem Punkt At (−t/0) sprungfrei, knickfrei und krümmungsruckfrei in das Trassenstück I übergeht. [Hinweis: Welche Funktionsgleichung hat die x-Achse?] h) Für Experten: Stelle mithilfe der Bedingungen aus f) in Abhängigkeit von den Parametern r und t eine Gleichungssystem auf, löse es mit der Gaußverfahren und 3r 8r 6r zeige, dass sich fr,t (x) = 4 ∙ x 4 + 3 ∙ x 3 + 2 ∙ x 2 − r (−t ≤ x ≤ 0, r, t ≥ 0) ergibt. t t i) Zeige, dass fr,t mit fr,t (x) = Bedingungen unter f) erfüllt. t 3r t4 8r 6r ∙ x 4 + t3 ∙ x 3 + t2 ∙ x 2 − r (−t ≤ x ≤ 0, r, t ≥ 0) die Merke: Dieses Verfahren, aus vorgegebenen Daten ein passendes Polynom abzuleiten, nennt man Polynominterpolation. Für unterschiedliche Abknickstellen At (−t/0) und verschiedene Kurvenradien r bzw. Übergangspunkten Br (0/−r) und Cr (r/0) ergeben sich unterschiedliche Kurvenverläufe. Folgende Abbildungen stellt für t = 80 und verschiedene r-Werte die entsprechenden Graphen der Schar von Graphen dar. j) Gib jeweils den Parameter r sowie die Funktionsgleichung f40,80 (x) an. In der folgenden Abbildung werden Kurvenverläufe für ein festes r bzw. konstante Punkte B50 (0/−50) und C50 (50/0) bei unterschiedlichen Abknickstellen At (−t/ 0) dargestellt. k) Gib die Parameter t an und entscheide, welche der vier Graphen zur Modellierung von Trassenstück I am besten geeignet ist. Begründe Deine Entscheidung. l) Programmiere die obige Situation mithilfe des Programms GeoGebra und sende Deine Programmierung an [email protected]. 3r 8r 6r Merke: Eine Funktion fr,t mit fr,t (x) = t4 ∙ x 4 + t3 ∙ x 3 + t2 ∙ x 2 − r (−t ≤ x ≤ 0, r, t ≥ 0) beschreibt in Abhängigkeit der beiden Parametern r und t eine Schar von Funktionen ganzrationaler Funktionen vierten Grades. Die Parameter r und t heißen Scharparameter der Funktionenschar. Neben den fünf Bedingungen aus Aufgabenteil f) soll der Übergang der beiden Trassenstücke I und II im Punkt B50 (0/−50) ebenfalls krümmungsruckfrei sein. Ohne 1 Nachweis darf verwendet werden, dass k r ´´(0) = 𝑟 (Expertenaufgabe). m) Leite fr,t zweimal ab und ermittle den t-Wert, für den das entsprechende Trassenstück I im Punkt B50 (0/−50) krümmungsruckfrei in den Viertelkreis übergeht. Bestimme den entsprechenden t-Wert für einen beliebigen Radius r. Merke: Ein krümmungsruckfreier Übergang bedeutet anschaulich, dass es einen Halbkreis gibt, der sich an beide Kurvenstücke gleichermaßen „anschmiegt“. Weiterführende Aufgaben Modellierung einer Umgehungsstraße Eine Schnellstraße führt von A(0/4) nach B(4/0) durch den Ort D(2/2) (Einheit: 1 km). a) Zeige, dass es eine lineare Funktion gibt, deren Graph durch die Punkte A, B und D verläuft. Nun soll eine Umgehungsstraße gebaut werden, die durch C(2/1) verläuft und in den Punkten A und B sprung- und knickfrei in die Schnellstraße g mündet. b) Ermittle das Gleichungssystem für die Koeffizienten einer ganzrationalen Funktion f mit dem Grad 4, so dass f diese Bedingungen erfüllt. Löse das LGS mithilfe des TR. [Hinweis: e und f können unmittelbar bestimmt werden.] c) Begründe, warum die Übergänge A und B zusätzlich krümmungssprungfrei sind, falls A und B Wendepunkte sind. Modellierung eines Autobahnkreuzes An einem Autobahnkreuz soll ein Straßenstück Gp(x) gebaut werden, auf dem man von der Autobahn g zur Autobahn h wechseln kann. Die Autobahnen kreuzen sich unter einem Winkel von 53°. Der geradlinige Abstand von A nach B beträgt 400 m. Beide Punkte haben vom Kreuzungspunkt S den gleichen Abstand. Die Übergänge in A und B sollen zunächst sprung- und knickfrei sein. a) Übertrage die Situation in ein geeignetes Koordinatensystem. [Tipp: Nutze die Symmetrie der Straßensituation aus.] b) Bestimme einen Funktionsterm möglichst niedrigen Grades, der den Graphen von p(x) möglichst gut wiedergibt. Erläutere alle Rechenschritte. Nun sollen die Übergänge A und B zusätzlich krümmungssprungfrei sein. c) Bestimme eine Funktionsgleichung p(x) für die neue Situation. [Tipp: Nutze wie in a) die Symmetrie der Straßensituation aus.] Modellierung einer Straßenkuppe Beim Bau von Straßen gilt es Straßenkuppen oder –senken möglichst holperfrei zu überwinden. Dazu können ganzrationale Funktionen verwendet werden. In der nachfolgenden Abbildung sind die beiden Straßenstücke angegeben, die es geeignet zu verbinden gilt. a) Übertrage die Situation in ein geeignetes Koordinatensystem. b) Ermittle eine Funktion möglichst niedrigen Grades, deren Graph zum Ausrunden der beiden Straßenstücke vor und nach der Kuppe geeignet ist, so dass die Übergänge sprung- und knickfrei sind. c) Zeige, dass die Übergänge nicht krümmungsruckfrei sind und gib an, welchen Grad die Modellfunktion von zwei sprung-, knick- und krümmungsruckfreien Übergangen haben müsste. Modellierung einer Verbindungsstraße Zwei parallel laufende Straßen sollen miteinander verbunden werden. Wenn die eine Straße auf der x-Achse liegt und die andere Straße auf der Geraden mit y = 50, so 1 soll die Funktion fb,d mit fb,d (x) = b ∙ (d − x 2 )2 (b, d > 0) eine neue Verbindungsstraße beschreiben. a) Bestimme die Parameter b und c und gib den Grad der Funktionenschar fb,d an. [b = 16200, d = 900] b) Berechne fb,d ´(x), fb,d ´´ (x) und zeige, dass die Verbindungsstraße knick- aber nicht krümmungssprungfrei in die beiden bestehenden Straßen einmündet. c) Bestimme den Wendepunkt der Verbindungsstraße. d) Untersuche, welchen Parameter man verändern müsste, wenn die beiden parallelen Straßen statt 50 m einen anderen Abstand hätten, aber der horizontale Abstand der beiden Straßen unverändert bei 30 m bliebe. Lösungen der Einführungsaufgaben a) Kleeblatt (Leverkusener Kreuz) Malteser (Köln-Ost) Vorteil geringer Platzbedarf einfache Bauweise, kostensparend Umkehren des Kreuz möglich (zweimal abbiegen) geringere Staugefahr, da Kreuz mit höherer Geschwindigkeit durchfahren werden kann. Turbine (oft in Großbritannien) Windmühle (USA) Nachteil geringere Staugefahr, da Kreuz mit höherer Geschwindigkeit durchfahren werden kann. weniger aufwendig in der Baumweise als das Malteserkreuz höhere Geschwindigkeiten Kleeblattkreuz möglich als bei hohe Staugefahr durch starkes Absenken der Geschwindigkeit (z. B. Leverkusener Kreuz) aufwendige Baukonstruktionen in der Mitte (vier Fahrbahnen übereinander), kostenintensiv kein Wenden möglich größerer Platzbedarf Kleeblattlösung kein Wenden möglich als bei geringere Geschwindigkeiten als bei Malteser oder Turbine kein Wenden möglich Näheres erfährst Du unter www.wikipedia.org/wiki/Autobahnkreuz b) Der Übergang von A100 zu D ist nicht sprungfrei. In A175 ist ein sprungfreier aber nicht knickfreier Übergang. Die durchgezogene Kurve hat in B50 einen knickfreien, aber nicht krümmungssprungfreien Übergang (im Gegensatz zum Übergang in A100). r kr(x) x d) Nach dem Satz des Pythagoras (siehe Abbildung oben) gilt: k r 2 (x) + x 2 = r 2 . Umgeformt nach k r (x) ergibt sich k r (x) = ±√r 2 − x 2 . Für den unteren Viertelkreis gilt daher: k r (x) = −√r 2 − x 2 . e) Etwa in der Mitte der Trasse I liegt ein Rechts-Links-Wendepunkt. Daher wird Trasse I durch eine Funktion mindestens vierten Grades beschrieben (mindestens zwei Wendestellen bedeuten mindestens zwei Nullstellen der zweiten Ableitung, d. h. mindestens Grad zwei der zweiten und damit mindestens Grad vier bei der Funktion). Daher werden mindestens fünf Bedingungen zur Modellierung von Trasse I benötigt. f) fr,t(-t) = 0, fr,t ´(-t) = 0, fr,t ´´(-t) = 0, fr,t (0) = -r, fr,t ´(0) = 0 g) Die x-Achse hat die Funktionsgleichung g(x) = 0. Daher gilt g(-t) = g´(-t) = g´´(-t) = 0, so dass der Übergang At(-t/0) sprung-, knick- und krümmungssprungfrei ist. h) fr,t (x) = ax 4 + bx 3 + cx 2 + dx + e fr,t ´(x) = 4ax 3 + 3bx 2 + 2cx + d fr,t ´´(x) = 12ax 2 + 6bx + 2c fr,t (0) = e: e = −r; fr,t ´(0) = 0: d = 0; fr,t (−t) = 0: t 4 a − t 3 b + t 2 c − r = 0; fr,t ´(−t) = 0: −4t 3 a + 3t 2 b − 2tc = 0 fr,t ´´(−t) = 0: 12t 2 b − 6tb + 2c = 0. Damit ergibt sich ein 3x3-LGS mit den Unbekannten a, b und c. Mit dem 3𝑟 8𝑟 6𝑟 Gaußverfahren ergibt sich in Abhängigkeit von t und r: a = 4 und b = 3 und c = 2 . 𝑡 𝑡 𝑡 i) Hier überprüft man die fünf Bedingungen fr,t(-t) = 0, fr,t ´(-t) = 0, fr,t ´´(-t) = 0, fr,t (0) = -r, fr,t ´(0) = 0. j) r = 10, 20, 30, 40. Für r =40 und t = 80 ergibt sich: f40,80 (x) = 3 1024000 ∙ x4 + 1 1600 ∙ x3 + 3 80 ∙ x 2 − 40. k) t = 25, 100, 175, 250. Der Graph zu f50,175 scheint bei B50 einen annähernd krümmungssprungfreien Übergang zu haben und ist daher am besten zur Modellierung geeignet. m) fr,t ´(x) = k 50 ´´(0) = 1 50 12r t4 ∙ x3 + 24r t3 ∙ x2 + = f50,t ´´(0) ergibt 1 12r t2 1 50 ∙ x und fr,t ´´(x) = = 600 t2 36r t4 ∙ x2 + 48r t3 ∙x+ 12r t2 ⟺ t = √30000 ≈ 173 1 12r Allgemein gilt: k r ´´(0) = = fr,t ´´(0) ⇔ = 2 ⇔ 𝑡 = √12 ⋅ 𝑟. Also für t ≈ 3,46r ist die Übergangsstelle von 𝑟 𝑟 t Trasse I in den Viertelkreis krümmungssprungfrei. Lösungen der weiterführenden Aufgaben Modellierung einer Umgehungsstraße a) Die Gerade g hat die Funktionsgleichung g(x) = -x + 4. D(2/2) liegt wegen 2 = -2+4 auf dieser Geraden. b) f(0) = 4, f´(0) = -1, f(2) = 1, f(4) = 0, f´(4) = -1 liefert mit f(x) = ax 4 + bx 3 + cx 2 + dx + e und f´(x) = 4ax 3 + 3bx 2 + 2cx + d: e = 4 und d = -1 sowie die drei Gleichungen: 256a + 64b + 16c = 0, 256a + 48b + 8c = 0 und 1 16a + 8b + 4c = -1. Es ergeben sich mit dem TR oder mit Gaußverfahren die Lösungen: a = − , b = 0,5, c = -1. Also: f(x) = − 1 16 16 𝑥 4 + 0,5𝑥 3 − 𝑥 2 − 𝑥 + 4. c) Die Funktion g hat als lineare Funktion offenbar in den Übergangsstellen als zweite Ableitung den Wert Null. Sind A und B WP, so ist hat auch die zweite Ableitung von f an den Übergangsstellen den Wert Null. Modellierung des Autobahnkreuzes a) Man nutzt die Symmetrie des Autobahnkreuzes aus und legt die Straße so, dass die Symmetrieachse auf der y-Achse liegt. So können wir gerade Funktionen betrachten. b) Ansatz: p(x) = ax2 + b und p`(x) = 2ax. Nun soll gelten: p(-200) = 0 und p´(-200) = tan (26,5) ≈ 0,49858. Also folgt: 40000a + b = 0 und -400a = tan (26,5) ≈ 0,49858 a ≈ -0,00124645 und b = -40000a ≈ 49,85. Insgesamt gilt nun p(x) ≈ -0,00125x + 50. c) Nun muss zusätzlich gelten, dass p´´(-200) = 0 ist. Man wähle als Ansatz den achsensymmetrischen Graphen einer Funktion vierten Grades: p(x) = ax4 + bx2 + c. Hier gilt: p´(x) = 4ax3 +2bx und p´´(x) = 12ax2 + 2b. Man erhält wie unter b): p(-200) = 0 und p´(-200) = tan (26,5) ≈ 0,49858 und p´´(-200) = 0. Es ergibt sich folgendes LGS für a, b und c: 1600000000a + 40000b + c = 0 und -32000000a – 400 b = 0,49858 sowie 480000a + 2b = 0. Der TR liefert: a ≈ 7,79 10-9 und b ≈ -0,0018697 und c ≈ 62,32. Modellierung einer Straßenkuppe a) und b) 1 2 2 1 c) Man hat f`´´(0) und f´´(6) zu berechnen. Es gilt f´´(x) = 𝑥 − . Daher f`´´(0) = − ≠ 0 , f`´´(6) = − 0. 36 9 9 16 Also ist f an den Stellen x = 0 und x = 6 nicht krümmungssprungfrei. Eine solche Funktion müsste sechs Bedingungen erfüllen, hätte also mindestens fünften Grad. Modellierung der Verbindungsstraße: a) fb,d (0) = 50: d2 b = 50 ⇔ d2 = 50b und fb,d (30) = 0: 1 4 4𝑑 b 𝑏 𝑏 b) fb,d ´(x) = ∙ (d − x 2 )(−2𝑥) = 𝑥 3 − erhält f16200,900 ´(x) = 1 2 4050 𝑥 ⇒ fb,d ´´(x) = x 3 − x und f16200,900 ´´(x) = 9 2 1 b ∙ (d − 900)2 = 0 ⇔ d = 900. Also b = 12 1 𝑏 1350 𝑥2 − 2 4𝑑 x2 − . 4 9 𝑏 d2 50 = 16200. . Setze nun b = 16200 und d = 900 ein. Man Es gilt f16200,900 ´(30) = f16200,900 ´(0) = 0. Allerdings gilt f16200,900´´(0) = − ≠ 0 und f16200,900´´(30) = ≠ 0. Daher sind die Übergänge sprung-, aber 9 9 nicht krümmungssprungfrei. c) f16200,900 ´´(x) = 1 1350 f16200,900´´´(√300) = 2 x 2 − = 0 ⟺ 𝑥 = ±√300 ≈ 17,32. 1 625 9 √300 > 0 und f16200,900 (√300) = 20 9 : Re-Li-Wendepunkt W(17,332/22,22). d) Es muss der Parameter b verändert werden, da er für die Streckung und Stauchung des Graphen in yRichtung verantwortlich ist.