Kapitel 3 Dynamik
Werbung

Kapitel 3
Dynamik
Wenn die Beschleunigung eines Körpers bekannt ist, haben wir gelernt, wie wir
seine momentane Geschwindigkeit und seine Lage als Funktion der Zeit (mit
Integralrechnung oder mit numerischer Rechnung) bestimmen können. Bislang
haben wir gefragt, wie sich ein Körper bewegen wird.
Aber in vielen realistischen Fällen kennen wir die Beschleunigung oder die
Geschwindigkeit des Körpers nicht. Wir wollen wissen, weshalb ein Körper sich
bewegt. Wir werden dazu physikalische Grössen einführen, die für die gesamte
Physik von fundamentaler Bedeutung sind: der (lineare) Impuls (oder die
Bewegungsgrösse) und die Kraft.
Wir werden das Problem so ausdrücken: wir kennen die Kräfte, die auf den
Körper wirken (oder die Energie des Körpers), und wir wollen diese Information benutzen, um die Bewegung vorherzusagen. Diese Methoden bilden das
Gebiet der Dynamik. Eine zentrale Rolle in der Dynamik spielt die Masse des
Körpers.
Auf den Begri↵en Masse, Impuls und Kraft basiert die gesamte klassische Mechanik.
3.1
3.1.1
Die Masse
Die Masse und das Gewicht
In unserer Alltagssprache benutzen wir austauchbar die Wörter Masse“ und
”
Gewicht“. Im Rahmen der Physik werden diese Wörter mit verschiedener
”
Bedeutung benutzt.
Wir sagen:
71
72
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
a) Das Gewicht ist eine Kraft1 , die ein Körper z.B. auf den Boden
ausübt. Das Gewicht ist eine Grösse, die mit einer Waage gemessen wird.
b) Die Masse ist eine Eigenschaft eines Körpers. Die Masse ist ein
Mass dafür, wieviel “Sto↵” im Körper enthalten ist.
Das Gewicht eines Körpers kann in verschiedenen Situationen verschieden sein.
Das Gewicht eines Astronauts sei z.B. auf der Erdoberfläche 90 kg“. Wenn er
”
in einer Umlaufbahn um die Erde ist, ist sein Gewicht gleich null. Im Gegensatz
dazu ist die Masse des Astronauts auf der Erde und in der Umlaufbahn immer
dieselbe. Der Astonaut ist nicht masselos geworden, sondern nur gewichtslos.
3.1.2
Die Masse als Trägheit
Die Masse ist ein Mass für den Widerstand, den der Körper einer Beschleunigung entgegensetzt, d.h. ein Mass für die Trägheit des Körpers.
Demonstrationsexperiment: Rückstossversuch.
Wir werden einen Rückstossversuch verwenden, um die Masse eines Körpers
und seine entsprechende Trägheit zu definieren.
Wir betrachten zwei Wagen, A und B, die sich reibungsfrei über eine Luftkissenbahn bewegen können. Siehe Abbn. 3.1 und 3.2. Am Anfang werden die
beiden Wagen sich in Ruhe befinden und mit einem Faden zusammengebunden.
Eine Feder ist zwischen den beiden Wagen eingeklemmt.
Wenn der Faden zerschnitten wird, entfernen sich beide Wagen mit entgegengesetzen Geschwindigkeiten voneinander.
Bei diesem Versuch wird der Faden zerschnitten und die Geschwindigkeiten
der Wagen vA und vB gemessen. Wir bemerken, dass die Geschwindigkeiten
der Wagen nicht immer denselben Betrag besitzen.
Aus Experimenten mit verschiedenen Wagen schliessen wir, dass das Verhältnis
der Geschwindigkeiten der beiden Wagen gegeben ist durch
mA
vB
=
mB
vA
wobei mA und mB die Massen“ der Wagen sind.
”
1
Wir werden eine genaue Definition der Kraft im Kap. 3.5.1 einführen.
(3.1)
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
73
Abbildung 3.1: Demonstrationsexperiment: Wagen auf einer Luftkissenbahn.
Feder Faden
A
a)
B
reibungsfreie Luftkissenbahn
vA
b)
A
B
vB
reibungsfreie Luftkissenbahn
Abbildung 3.2: Ein Rückstossversuch: a) Anfangszustand b) Faden zerschnitten.
74
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Zwei wichtige Bemerkungen:
1. Das Rückstossexperiment hat nichts mit den Gewichten der Wagen zu
tun. Man könnte das Experiment ebenso im Weltraum (wo die Wagen
gewichtslos wären) durchführen. Das Ergebnis wäre dasselbe!
Auf der Erde haben wir eine Luftkissenbahn verwendet, so dass die Wagen
sich frei (z.B. mit vernachlässigbarer Reibung) bewegen. Die nach unten
gerichtete Erdbeschleunigung wird von der Luftkissenbahn kompensiert
(die Wagen fallen nicht nach unten). Obwohl die Wagen auf die Luftkissenbahn drücken, ist der E↵ekt dank der Luftströmung vernachlässigbar.
2. Das Ergebnis ist auch unabhängig von der Feder:
Wäre nämlich die Feder stärker, würden sich beide Wagen schneller voneinander entfernen. Das Verhältnis der Geschwindigkeiten würde sich
aber nicht ändern. D.h., dass die Masse eines Wagens nur von den Eigenschaften der Wagen abhängt.
Bis jetzt haben wir nur von einem Verhältnis gesprochen. Wie sollen wir die
Masse definieren?
Wir wählen eine der Massen, z.B. mB , so, dass sie eine genormte Masse besitzt.
Von einer solchen genormten Masse haben wir schon im Kap. 1.2 gesprochen,
als die Definition der Einheit der Masse (das Kilogramm) betrachtet wurde.
Wir haben dort gesagt:
Das Kilogramm ist die Masse eines Prototyps des Kilogramms. Es ist ein
Platin-Iridium-Zylinder, der im Bureau International des Poids et Mesures in
Sèvres bei Paris aufbewahrt wird.
Dann werden alle Massen relativ zur gewählten Masse mB gemessen, als
mA =
vB
mB
vA
Alle anderen Massen werden dann durch einen Rückstossversuch als
✓
◆
v(BIPM Prototyp)
mA = 1 kg ·
vA
definiert, wobei v(BIPM
totyps ist.
3.1.3
(3.2)
(3.3)
Prototyp) die gemessene Geschwindigkeit des Pro-
Träge und schwere Masse
Die vorher gegebene Definition der Masse entspricht einer genauen, aber komplizierten Art von Messung der Masse! Eine Messung mit einer Waage ist
eine einfachere Methode, um die Masse zu messen. Siehe Abb. 3.3.
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
75
Stab
Drehpunkt
Gegenstand
genormte
Masse
Abbildung 3.3: Waage. Wenn die zwei Massen gleich sind, wird der Stab stillstehen. Der Stab ist im Gleichgewicht.
Die Waage vergleicht die Gewichte der Massen, d.h. die nach unten gerichteten Gravitationskräfte, die die zwei Massen auf den Teller ausüben. Wenn die
Gravitationskräfte einander gleich sind, bleibt der Stab im Gleichgewicht.
Mit einer solchen Waage können wir die Gravitationskräfte von Massen mit der
Gravitationskraft, die die genormte Masse auf den Teller ausübt, vergleichen.
Wir nehmen zwei Wagen, die sich im Rückstossversuch mit derselben Geschwindigkeit bewegen. D.h., dass sie die gleiche Masse besitzen. Wenn wir diese Wagen auf den Teller der Waage stellen, wird der Stab im Gleichgewicht stehen:
Wenn wir die Messungen mit einer Waage mit denjenigen des Rückstossversuches vergleichen, bemerken wir, dass gleiche Massen die gleichen Gravitationskräfte ausüben.
Dieses experimentelle Ergebnis ist keine o↵ensichtliche Sache! Der Physiker
Eötvös2 hat 1922 mit sehr genauen Versuchen bewiesen, dass Körper mit gleicher Masse gleiche Gravitationskräfte ausüben. Er hat dieses Ergebnis mit einer
Genauigkeit von 1 Teil in 109 geprüft.
Wir sagen gewöhnlich
a) die träge Masse ist die Grösse, die wir mit einem Rückstossexperiment
messen, und
b) die schwere Masse ist die Grösse, die wir mit einer Waage messen.
Dank R.H. Dicke3 , der das Eötvösche Experiment noch verbessert hat, wissen
2
3
Loránd Eötvös (1848-1919)
Robert Henry Dicke (1916-1997)
76
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
wir heutzutage, dass beide Definitionen mit einer Genauigkeit von 1 Teil in
1011 gleich sind.
Im Bereich der Mechanik wird nicht gesagt, warum diese zwei Massen gleich
sind. Nur in der Allgemeinen Relativitätstheorie von Einstein kann man mit
Hilfe des Äquivalenzprinzips verstehen, warum beide gleich sein müssen.
3.2
Der lineare Impuls
Nun werden wir das Gesetz der Impulserhaltung einführen.
Ein Erhaltungs“-Gesetz im Gebiet der Physik drückt aus, dass eine Grösse
”
sich nicht ändert. Sie wird erhalten, d.h. sie wird vor und nach verschiedenen
Vorgängen dieselbe sein.
3.2.1
Die Definition des Impulses
In der Definition der Masse haben wir gesehen, dass in Rückstossversuchen
das Verhältnis der Geschwindigkeiten der Wagen eine konstante Zahl war, unabhängig von der Feder.
Jetzt wollen wir eine Grösse definieren, die sich nicht ändern wird, wenn der
Faden zwischen den Wagen zerschnitten wird.
Wir schreiben die Gl. 3.1 als
mA
vB
=
mB
vA
)
mA vA = mB vB
(3.4)
Jetzt bemerken wir, dass vA und vB die Beträge der Geschwindigkeitsvektoren
der Wagen sind. Da die Wagen sich in entgegengesetzen Richtungen voneinander entfernen, gilt
mA v A = mB v B
(3.5)
(Beachte das Vorzeichen!) wobei wir die Geschwindigkeitsvektoren statt der
Beträge der Geschwindigkeiten benutzt haben.
Diese Gleichung wird geschrieben als
mA v A + mB v B = 0 (nachdem der Faden zerschnitten ist)
(3.6)
Mit einem solchen Ausdruck haben wir die folgende Grösse den Wagen A und
B zugeordnet: mA v A ist nur eine Eigenschaft des Wagens A, und mB v B nur
eine Eigenschaft des Wagens B.
Eine neue Grösse wird deshalb definiert:
Der lineare Impuls eines Körpers ist gleich dem Produkt aus seiner Masse
und seiner Geschwindigkeit:
p = mv
(3.7)
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
77
Der Impuls ist eine vektorielle Grösse, weil er das Produkt einer skalaren Grösse
(der Masse) und einer vektoriellen Grösse (der Geschwindigkeit) ist. Wir bemerken, dass gilt:
mA v A + mB v B = p A + p B = 0
(3.8)
Die Gleichung drückt aus, dass die Summe der Impulse nach dem Rückstoss
gleich null ist.
Bevor der Faden zerschnitten wurde, waren beide Wagen in Ruhe. Vor dem
Rückstoss, gilt daher
vA = 0
vB = 0
(3.9)
Die Summe der linearen Impulse, bevor der Faden zerschnitten wurde, ist dann
mA v A + mB v B = 0 (bevor der Faden zerschnitten ist)
(3.10)
Wir schliessen daraus, dass die Summe der linearen Impulse der Wagen
sich wegen des Rückstosses nicht geändert hat.
Die Summe der linearen Impulse der Wagen nennen wir den Gesamtimpuls
ptot = pA + pB
(3.11)
ptot (vorher) = ptot (nachher)
(3.12)
Die Gleichung
drückt die Erhaltung des Gesamtimpulses aus.
3.3
Die Impulserhaltung
3.3.1
Das allgemeine Gesetz
Auf den vorherigen Seiten haben wir einen Rückstossversuch betrachtet. Wir
haben gefunden, dass in einem solchen Versuch eine vektorielle Grösse — der
Gesamtimpuls — erhalten ist. Bisher haben wir nur das Ergebnis des Rückstossversuches auf eine andere Art neu dargelegt.
Das Gesetz der Impulserhaltung ist aber ganz allgemein gültig!
Es kann so formuliert werden:
Ein isoliertes“ System ist ein System, das keine Wechselwirkungen mit ande”
ren Körpern spürt. Das System kann sehr weit von anderen Körpern entfernt
sein, oder die Wechselwirkungen mit anderen Körpern kompensieren einander,
so dass der E↵ekt verschwindet.
In einem solchen isolierten System ist der Gesamtimpuls erhalten.
78
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Das Gesetz der Erhaltung des Impulses ist eines der grundlegenden und
allgemein gültigen Gesetze der Physik. Wir kennen keine Ausnahmen von diesem Prinzip. Wir zeigen nun, dass die drei berühmten Newtonschen Gesetze
aus dem Impulserhaltungsgesetz folgen.
3.4
Das erste Newtonsche Gesetz: Trägheit
Eine erste Folgerung aus dem Impulserhaltungsgesetz ist das Trägheitsprinzip. Wir sehen, dass für ein isoliertes System gelten muss:
ptot = konst. )
dptot
=0
dt
(3.13)
Wenn ein System nur einen Körper enthält, ist der Gesamtimpuls gleich dem
Impuls des Körpers, und wir erhalten
dp
d(mv)
dv
=0=
=m
(3.14)
dt
dt
dt
wobei wir angenommen haben, dass sich die Masse des Körpers mit der Zeit
nicht ändert.
Daraus folgt:
dv
= 0 ) v = konst. ) a(t) = 0
dt
(3.15)
Wir sagen,
Trägheitsprinzip: Ein Körper bleibt in Ruhe oder bewegt sich mit
konstanter Geschwindigkeit, wenn er isoliert (oder frei) ist.
3.5
3.5.1
Das zweite Newtonsche Gesetz: Aktionsprinzip
Die Definition der Kraft
Wir betrachten eine gleichförmige Kreisbewegung, die wir in Kap. 2.7 studiert
haben. Ein Ball der Masse m kann z.B. mit einem Faden gezwungen werden,
sich auf einem Kreis zu bewegen (Siehe Abb 3.4). Wir haben gesehen, dass
eine zum Zentrum des Kreises hin gerichtete Beschleunigung auf den Ball wirken muss, damit der Ball sich auf einer Kreisbahn bewegt.
Wir können den Impuls des Balles berechnen. Es gilt:
r(t) = r cos !t ex + r sin !t ey
v(t) =
dr
=
dt
r! sin !t ex + r! cos !t ey
(3.16)
(3.17)
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
v
79
m
a
Faden
r
Abbildung 3.4: Die Beschleunigung des Balles ist zum Zentrum des Kreises hin
gerichtet.
Damit ist der Impuls gleich:
p(t) = mv(t) = mr! ( sin !t ex + cos !t ey ) ,
(3.18)
wobei m die Masse des Balles (im Allgemeinen des Körpers) ist.
Der Impulsvektor zeigt in die Richtung des Geschwindigkeitsvektors und ist
deshalb tangential. Er ändert sich mit der Zeit, so dass sich der Ball auf dem
Kreis bewegt.
Wir können die zeitliche Ableitung des Impulses betrachten:
dp
= mr! ( ! cos !t ex ! sin !t ey )
dt
= m! 2 (r cos !t ex + r sin !t ey )
=
m! 2 r
(3.19)
Der resultierende Vektor zeigt zum Zentrum des Kreises hin. Dies ist auch die
Richtung des Fadens. Siehe Abb. 3.4.
Was ist für die zeitliche Änderung des Impulses verantwortlich?
Wir sagen, dass der Faden eine Kraft auf den Ball ausübt. Diese Kraft ist für
die zeitliche Änderung des Impulses verantwortlich.
Zusammenfassend:
Die resultierende Kraft, die auf einen Körper wirkt, wird als die zeitliche Änderung des Impulses des Körpers definiert:
F ⌘
dp
dt
(3.20)
80
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Wir sagen: Wenn sich der Impuls eines Körper mit der Zeit ändert, wirkt auf
den Körper eine nicht verschwindende Kraft.
Weil der Impuls eine vektorielle Grösse ist, der eine Richtung und einen Betrag
besitzt, ist die Kraft auch ein Vektor.
Im folgenden Kapitel werden wir verschiedene Arten von Kräften definieren.
Wenn wir die Wirkung mehrerer Kräfte auf einen Körper betrachten, wird die
resultierende Kraft als die Vektorsumme der einzelnen Kräfte geschrieben:
F =
X
Fi
(3.21)
i
Es folgt daraus, dass sich der Impuls eines Körpers nur dann mit der Zeit
ändern wird, wenn sich die Wirkungen aller Kräfte nicht gegenseitig kompensieren.
3.5.2
Beziehung zwischen Kraft und Beschleunigung
Welche Rolle spielt dann die Masse? Wir können die Definition des Impulses als Funktion der Masse und der Geschwindigkeit des Körpers verwenden,
um eine Beziehung zwischen der resultierenden Kraft und der Beschleunigung
herzuleiten, die nur gilt, wenn die Masse des Körpers konstant ist:
F ⌘
dp
d
dv(t)
=
{m v(t)} = m
= m a(t)
dt
dt
dt
(3.22)
Es folgt damit:
Aktionsprinzip: Die Beschleunigung eines Körpers, dessen Masse sich mit
der Zeit nicht ändert, ist umgekehrt proportional zu seiner Masse und direkt
proportional zur resultierenden Kraft, die auf ihn wirkt:
a(t) =
1
F (t)
m
(3.23)
Weil die Masse eine skalare Grösse ist, zeigen die Beschleunigung und die
resultierende Kraft immer in dieselbe Richtung.
SI-Einheit: Die Einheit der Kraft ist 1 kg·m/s2 oder 1 Newton (N) und
entspricht jener Kraft, die benötigt wird, um einen Körper der Masse 1 kg mit
1 m/s2 zu beschleunigen.
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
3.6
81
Das dritte Newtonsche Gesetz: Aktion =
Reaktion
Wir betrachten die Wechselwirkung zwischen zwei Körpern A und B. Jeder
Körper übt eine Kraft auf den anderen aus. Experimentell wird beobachtet,
dass wenn ein Körper auf einen zweiten eine Kraft ausübt, so wirkt dieser auch
auf den ersten mit einer Kraft. Es gibt keine einzelne isolierte Kraft:
Jede Einzelkraft ist nur ein Aspekt einer gegenseitigen Wechselwirkung zwischen den zwei Körpern.
Wenn die erste Kraft als Aktionskraft bezeichnet wird, wird die zweite Reaktionskraft genannt (jede der beiden Kräfte kann natürlich als Aktion betrachtet werden, dann ist die andere die Reaktion).
Newton hat in seinem dritten Gesetz die Situation zusammengefasst und hat
die Richtungen und die Beträge der Kräfte postuliert:
Aktions-Reaktions-Prinzip: Zu jeder Aktion gehört eine gleich grosse Reaktion, die denselben Betrag besitzt aber in die entgegengesetzte Richtung zeigt.
Dieses Gesetz ist eine direkte Folgerung der Impulserhaltung: wir betrachten
ein isoliertes System mit den zwei Körpern A und B. Wenn das System isoliert
ist, wird der gesamte Impuls erhalten:
ptot = pA + pB = konst.
(3.24)
Wir berechnen die zeitliche Ableitung des gesamten Impulses:
dptot
dpA dpB
=
+
=0
dt
dt
dt
(3.25)
Aus der Definition der Kraft folgt:
FA + FB = 0,
(3.26)
wobei F A die Kraft ist, die auf den Körper A wirkt, und F B ist die Kraft, die
auf den Körper B wirkt. Weil das System isoliert ist, ist F A die Kraft, die der
Körper B auf A ausübt und F B die Kraft, die der Körper A auf B ausübt.
Damit:
FA =
3.7
3.7.1
FB :
Aktion = Reaktion
Anwendungen: Impulserhaltung
Ein freier Körper im Weltraum
Was ist ein freier Körper? Das ist sicher eine Idealisierung!
(3.27)
82
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Wir können trotzdem annehmen, dass für einen Körper im Weltraum, der sehr
weit entfernt von anderen Sternen und Planeten ist, die Wechselwirkung mit
dem Rest des Universums als vernachlässigbar betrachtet werden kann und der
Körper deshalb frei“ ist.
”
Ein Körper ist auch frei, wenn sich die Wechselwirkungen mit anderen Körpern
gegenseitig kompensieren, was zu einer verschwindenden Gesamtwechselwirkung führt. In diesem Fall ist der Impuls des Körpers erhalten:
p = m v = konst.
(3.28)
Der Körper bewegt sich geradlinig mit konstanter Geschwindigkeit.
Als Beispiel dazu können wir die Bahnkurve der künstlichen Satelliten Voyager 1 und 2 erwähnen. Diese Satelliten wurden 1977 in den Weltraum geschossen. Seitdem bewegen sie sich frei“ durch unser Sonnensystem. Nach
”
der ursprünglichen Beschleunigung wurden ihre Triebwerke ausgeschaltet (die
Triebwerke wurden nur gebraucht, um die Bahnkurve zu korrigieren, so dass sie
die gewünschten Planeten tre↵en). Ihre Bahnkurven sind in Abb. 3.5 gezeigt.
Abbildung 3.5: Bahnkurve der künstlichen Satelliten Voyager 1 und 2.
Die Bahnkurven sind wegen der Wechselwirkungen mit der Sonne und den
Platenen gekrümmt (diese Gravitationskraft wird im Kap. 3.10 diskutiert).
Wir bemerken, dass je mehr der Abstand zwischen den Satelliten und den
Planeten zunimmt, desto geradliniger wird die Kurve.
Ihre Geschwindigkeit relativ zur Sonne ist ungefähr 18 km/s. Heute haben
die Satelliten unser Sonnensystem verlassen und fliegen durch den Weltraum
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
83
weiter. Es wird erwartet, dass sie das ↵-Centauri System (der uns am nächsten
stehende Stern (ausser der Sonne)) in ungefähr 80’000 Jahren erreichen werden.
3.7.2
Der Rückstoss von Eiskunstläufern
Ein Mann mit einer Masse von 70 kg und ein Junge mit einer Masse von 35 kg
stehen zusammen auf einer glatten Eisfläche, für die die Reibung vernachlässigbar sei. Wie weit sind die beiden nach 5 Sekunden voneinander entfernt, wenn
sie sich voneinander abstossen und der Mann sich mit 0,3 m/s relativ zum Eis
bewegt? Siehe Abb. 3.6.
Der Mann und der Junge werden als ein System betrachtet. Kann ein solches
System als isoliert betrachtet werden?
Die Gravitationskraft, die beide erfahren, wird durch die Kraft ausgeglichen,
die vom Eis ausgeübt wird. Die Reibung mit dem Eis ist als vernachlässigbar
angenommen. Das System kann deshalb als isoliert betrachtet werden, und der
Gesamtimpuls wird erhalten.
vA
vB
Abbildung 3.6: Rückstoss der Eiskunstläufer. Der Gesamtimpuls wird erhalten.
Da die Masse des Mannes doppelt so gross ist wie die des Jungen, beträgt seine
Geschwindigkeit nur die Hälfte derjenigen des Jungen.
Da sich der Mann und der Junge ursprünglich in Ruhe befinden, ist der Gesamtimpuls gleich null.
pA + pB = 0
)
mA v A + mB v B = 0
(3.29)
Daraus folgt:
|v B | =
mA
70 kg
· |v A | =
· 0,3 m/s = 0,6 m/s
mB
35 kg
(3.30)
84
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Der Mann hat die doppelte Masse des Jungen und der Junge bewegt sich mit
der doppelten Geschwindigkeit des Mannes. Nach 5 Sekunden hat sich der
Mann 1,5 Meter, der Junge 3 Meter weit vom Ausgangspunkt weg bewegt, so
dass sie nun 4,5 Meter voneinander entfernt sind.
3.7.3
Raketenantrieb
Der Raketenantrieb folgt aus der Impulserhaltung.
Eine Rakete erzeugt ihren Schub, indem Treibsto↵ verbrannt und das dadurch
erzeugte Gas nach hinten ausgestossen wird. Die Rakete wird durch den Rückstoss nach vorne getrieben.
Ausgestossenes
Gas
Treibsto↵ + Rakete
Abbildung 3.7: Prinzip des Raketenantriebs.
Wenn man Raketen in den Weltraum schiesst, drückt die Rakete gegen das
Gas, das von ihr ausgestossen wird. Das Medium (d.h. Luft in der Nähe der
Erdoberfläche) hat in diesem Fall nichts mit dem Antrieb zu tun!
Demonstrationsexperiment: Rückstoss ist unabhängig vom Medium
Ein Glasrohr ist mit einem flexiblen Schlauch verbunden. Siehe Abb. 3.8. Ein
starker Wasserstrahl wird erzeugt, wenn Wasser durch das Rohr fliesst. Der
Wasserstrahl fliesst nach rechts und wegen des Rückstosses wird das Rohr nach
links ausgelenkt.
Wir schauen zuerst die Auslenkung des Glasrohrs an (d.h., den Auslenkungswinkel des Glasrohrs), wenn der Wasserstrahl gegen Wasser stösst. Dann
erhöhen wir das Rohr und wiederholen das Experiment mit dem Wasserstrahl
in Luft. In beiden Fällen ist die Auslenkung dieselbe.
Mit dem Wasserstrahl in Wasser und Luft bemerken wir, dass der Rückstoss
unabhängig vom Medium ist. Der Rückstoss hängt nur von der Masse und
Geschwindigkeit des ausgestossenen Sto↵es ab.
Demonstrationsexperiment: Rückstoss mit Wagen und CO2 -Flasche.
Das CO2 Gas wird nach hinten ausgestossen. Durch den Rückstoss wird der
Wagen (und der Mensch) nach vorne getrieben. Siehe Abb. 3.9.
Nun leiten wir die sogenannte Raketengleichung her. Wir brauchen nur das
Impulserhaltungsgesetz. Wir wählen ein Koordinatensystem mit einer positiv
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
85
Abbildung 3.8: Wasser fliesst durch das Rohr. Wir schauen die Auslenkung des
Glasrohrs an.
gerichteten x-Achse in Richtung der Bewegung der Rakete, und definieren die
folgenden (skalaren) Grössen:
1. v(t) = Geschwindigkeit der Rakete bezüglich dem festen Koordinatensystem;
2. u = konstante Ausstossgeschwindigkeit des Gases relativ zur Rakete
(u besitzt einen positiven Wert). Wenn das Gas mit der konstanten Geschwindigkeit u ausgestossen wird, bewegt es sich
relativ zum festgelegten Koordinatensystem mit einer Geschwindigkeit v–u;
3. M (t) = Gesamtmasse der Rakete+Treibsto↵ zur Zeit t.
Wir berechnen die Impulsänderung des gesamten Systems während eines Zeitintervalls dt. Wegen der Impulserhaltung muss die Impulsänderung gleich null
sein (wir nehmen an, dass keine äussere Kraft auf die Rakete wirkt).
• Zur Zeit t bewegt sich die Rakete mit der Geschwindigkeit v(t). Der
Gesamtimpuls ist gleich
p(t) = M (t) v(t)
(3.31)
• Zur Zeit t0 = t + dt, wobei dt ein Zeitintervall ist, hat die Rakete eine
Masse M –dm (wobei dm positiv ist und der Masse des ausgestossenen
86
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Abbildung 3.9: Rückstossexperiment: Durch den Rückstoss wird der Wagen
und der Mensch nach vorne getrieben.
Gases entspricht) und bewegt sich mit einer Geschwindigkeit v + dv. Der
Gesamtimpuls ist deshalb gleich:
p(t0 ) = M (t0 ) v(t0 ) + dm(v(t)
| {z } |
{z
Rakete
= [(M (t)
u)
}
ausgestossenes Gas
dm)(v(t) + dv)] + dm(v(t)
u)
(3.32)
v(t) dm
u dm ,
u dm
(3.33)
(3.34)
Es gilt:
p(t0 ) = M (t) v(t) + M (t) dv
⇡ M (t) v(t) + M (t) dv
dm dv + v(t) dm
wobei wir den Term dm dv weggelassen haben, weil er ein Produkt aus zwei
sehr kleinen Grössen ist und daher im Vergleich zu den anderen Grössen vernachlässigbar ist.
Die Impulsänderung während des Zeitintervalls dt ist
p(t0 )
p(t) ⇡ M (t) v(t) + M (t) dv
= M (t) dv u dm
⌘ 0,
u dm
M (t) v(t)
(3.35)
Geschwindigkeit v (m/s)
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
87
500
400
u = 200 m/s
300
200
u = 50 m/s
u = 100 m/s
100
0
0.25
0.5
0.75
1
B ⌘ m/M0
1.25
Abbildung 3.10: Raketenantrieb: Geschwindigkeit der Rakete v als Funktion
der ausgestossenen Massen für 3 verschiedene Ausstossgeschwindigkeiten u
= 50 m/s (untere gestrichelte Kurve), 100 m/s (kontinuierliche Kurve) und
200 m/s (obere gestrichelte Kurve). Die horizontale Linie entspricht einer Geschwindigkeit von v =100 m/s.
wobei wir die Impulserhaltung verwendet haben. Es gilt daher
M (t) dv = u dm
)
M (t)
dv
dm
=u
dt
dt
(3.36)
Aus M (dv/dt) = F folgt, dass auf die Rakete eine Schubkraft F wirkt, mit
dem Betrag
F =u
dm
dt
(3.37)
und daher die Rakete beschleunigt wird.
Wir integrieren nun die Raketengleichung und erhalten
M (t)
dv
dm
=u
dt
dt
)
dv
=
dt
u dM
M (t) dt
(3.38)
wobei wir die Gleichung dm = –dM verwendet haben, da die Masse des Gases
aus der Abnahme der Masse der Rakete kommt (dM < 0). Durch Integration
erhalten wir:
Zt
Zt
dv 0
1 dM 0
dt = u
dt
(3.39)
0
dt
M (t0 ) dt0
t0
t0
88
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Damit gilt:
v(t)
v0 =
u
M
Z (t)
M0
=
dM 0
=
M0
u {ln (M0
m)
u {ln (M (t))
ln M0 }
ln M0 }
(3.40)
wobei M0 die Anfangsmasse der Rakete zur Zeit t = t0 und m die Gesamtmasse
des ausgestossenen Gases ist. Deshalb ist die Geschwindigkeit der Rakete als
Funktion der ausgestossenen Masse gleich (für v0 = 0):
✓
◆
M0
v = u {ln M0 ln (M0 m)} = u ln
M0 m
✓
◆
1
= u ln
(3.41)
1 m/M0
Wir definieren das Verhältnis B, das der ausgestossenen Gasmasse m relativ
zur gesamten Anfangsmasse der Rakete M0 entspricht:
B⌘
m
M0
(0 B 1)
Die Geschwindigkeit der Rakete ist damit:
✓
◆
1
v = u ln
1 B
(3.42)
(3.43)
Sie ist als Funktion von B für 3 verschiedene Ausstossgeschwindigkeiten u in
der Abb. 3.10 aufgetragen. Wir bemerken:
• Für B ! 1 erhalten wir v ! 1: die ganze Rakete wird verbrannt (inkl.
Astronauten!) und erreicht eine unendliche Endgeschwindigkeit mit einer
verschwindenden restlichen Masse.
• In der Praxis ist B < 1. In diesem Fall ist die Endgeschwindigkeit zur Geschwindigkeit u proportional. Je schneller das Gas bezüglich der Rakete
ausgestossen wird, desto mehr wird die Rakete beschleunigt, und daher
erreicht sie eine höhere Endgeschwindigkeit.
Kann sich für einen Beobachter das ausgestossene Gas in der gleichen Richtung
wie die Rakete bewegen? Ja, wenn v > u. Es gilt
✓
◆
1
1
v > u ) ln
>1 )
>e
1 B
1 B
1
)B>1
⇡ 0.63
(3.44)
e
Siehe Abb. 3.10.
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
89
Demonstrationsexperiment: Die letzten Kugeln rollen in gleicher Richtung
wie der Wagen
Ein Wagen wird mit Kugeln beladen, die mit einer Platte auf dem Wagen
gehalten werden. Siehe Abb. 3.11.
Wenn die Platte herausgezogen wird, fällt die erste Kugel aus dem Wagen
nach rechts mit einer Geschwindigkeit u relativ zum Wagen. Als Folge erteilt
sie dem Wagen einen nach links gerichteten Rückstoss. Der Wagen bewegt sich
mit der Geschwindigkeit v nach links. Wir beobachten, dass wenn die relative
Geschwindigkeit der Kugel grösser ist als die Geschwindigkeit des Wagens, bewegt sie sich nach rechts. Die zweite Kugel fällt auch und gibt dem Wagen einen
zweiten Rückstoss. Die Geschwindigkeit des Wagens nimmt zu, wir beobachten
aber, dass die zweite Kugel sich noch nach rechts bewegt. Mit zunehmender
Geschwindigkeit v des Wagens, wird der Grenzfall erreicht, bei dem die Geschwindigkeit u der Kugel relativ zum Wagen kleiner als die Geschwindkgeit v
des Wagens ist. In diesem Fall beobachten wir, dass die Kugel sich in dieselbe
Richtung wie der Wagen bewegt. Die letzten Kugeln rollen in gleicher Richtung
wie der Wagen.
Abbildung 3.11: Kugeln werden vom Wagen losgelassen. Wir beobachten die
Bewegungsrichtung der Kugeln nachdem sie losgelassen wurden.
3.8
Anwendungen: Kontaktkräfte
In der Natur beobachten wir verschiedene Arten von Kräften. Wir werden uns
nun mit den Kräften, die auf makroskopische Gegenstände wirken, beschäftigen. Diese Kräfte, sogenannte Kontaktkräfte, werden z.B. von Federn, Fäden
90
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
oder Oberflächen ausgeübt, wenn diese in direktem Kontakt mit den Gegenständen sind.
Das Konzept der Kraft und die Newtonschen Gesetze spielen ihre wichtigste
Rolle in Anwendungen. Wenn wir sie nicht anzuwenden wissen, dann sind sie
nicht nützlich.
Wir diskutieren im Folgenden einige Anordnungen.
3.8.1
Körper, die sich aufeinander befinden
Wir betrachten ein System mit zwei Blöcken: der erste Block sitzt auf dem
zweiten, der sich auf dem Boden befindet (siehe Abb. 3.12).
Block A
Block B
Abbildung 3.12: Aufeinander befindliche Körper.
Im Allgemeinen können wir einige Regeln“ formulieren, um die Anwendung
”
von Kräften zu vereinfachen:
1. Man muss komplizierte Systeme in kleine Teile unterteilen, so dass jeder
Teil als ein Massenpunkt (Siehe Kap. 2.1.1) betrachtet werden kann.
2. Jeder Körper wird durch einen Punkt dargestellt.
3. Man zeichnet die Kräfte für jeden Massenpunkt. Nur die Kräfte, die auf
den Massenpunkt wirken, werden dargestellt.
4. Jede Kraft muss eine Richtung und einen Betrag besitzen.
Verschiedene Körper können z.B. durch Feder- oder Fadensysteme miteinander
verbunden werden oder können aneinander stossen oder ziehen.
Alle Wechselwirkungen zwischen Körpern werden durch Kräfte dargestellt.
In unserem Beispiel sind wir an den zwei Blöcken A und B interessiert. Die
Massen werden als MA und MB bezeichnet. Der Boden wird nicht betrachtet,
und deshalb werden wir die Kräfte, die auf den Boden wirken, nicht zeichnen.
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
F A = MA g
MA
91
NA
FA
NB
F B = MB g
MB
F AB F B
Abbildung 3.13: Aufeinander befindliche Körper mit markierten Schwerpunkten und Kräftediagramm.
Das entsprechende Kräftediagramm ist in Abb. 3.13 wiedergegeben.
Wir finden 5 unterschiedliche Kräfte:
1. Block A:
(a) F A ist die Gravitationskraft (d.h. das Gewicht) des Blocks A der
Masse MA . Diese Kraft beschreibt die Wechselwirkung zwischen der
Erde und dem Block A.
(b) N A ist die Normalkraft, die der Block B auf den Block A ausübt.
2. Block B:
(a) F B ist die Gravitationskraft (d.h. das Gewicht) des Blocks B der
Masse MB . Diese Kraft beschreibt die Wechselwirkung zwischen der
Erde und dem Block B.
(b) N B ist die Normalkraft, die der Boden auf den Block B ausübt.
(c) F AB ist die Kraft, die der Block A auf den Block B ausübt.
Diese Kräfte sind vektorielle Grössen, die eine Richtung und einen Betrag besitzen.
Wir diskutieren die Gleichgewichtssituation, d.h. wenn die Körper in Ruhe
bleiben. In diesem Fall müssen die wirkenden Kräfte einander kompensieren.
Wir finden eine Bedingung für jeden Körper:
Block A:
Block B:
oder
(
F A + NA = 0
F B + N B + F AB = 0
F A + NA
= MA g + N A = 0
F B + N B + F AB
= MB g + N B + F AB = 0
(3.45)
(3.46)
(3.47)
92
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Wir haben ein System von zwei Gleichungen mit 3 Unbekannten. Wir brauchen
eine zusätztliche Bedingung. Wir verwenden das Aktions-Reaktions-Prinzip.
Weil nun
1. F AB die Kraft ist, die der Block A auf den Block B ausübt, und weil
2. N A die Kraft ist, die der Block B auf den Block A ausübt,
müssen sie einander kompensieren. Die Kraft N A kann als die Reaktion der
Kraft F AB betrachtet werden oder umgekehrt. Die Kräfte entsprechen der gegenseitigen Wechselwirkung zwischen den zwei Blöcken. Damit ist:
F AB =
und es folgt
(
MB g + N B
NA
(3.48)
NA
=
NA
=0
MA g
(3.49)
Schliesslich ist:
)
MB g + N B + MA g = 0
(MA + MB ) g + N B = 0
) N B = (MA + MB ) g
(3.50)
(3.51)
(3.52)
Wie erwartet, sagt diese Gleichung voraus, dass die Kraft N B , die der Boden
auf den Block B ausübt, das gesamte Gewicht der Blöcke kompensieren muss.
In ähnlicher Weise muss die Kraft N A , die der Block B auf den Block A ausübt,
das Gewicht des Blocks A kompensieren:
NA =
3.8.2
MA g
(3.53)
Ein hängendes Gewicht
Ein Gewicht der Masse M hängt an drei Fäden von einer Zimmerdecke, wie in
der Abb. 3.14 gezeigt ist. Es wird beobachtet, dass das Gewicht in Ruhe bleibt.
Was sind die Beträge der Kräfte in den Fäden?
Der Knoten verbindet die drei Fäden: Er wird als Körper“ betrachtet. Gemäss
”
Abb. 3.14 wirken die drei Kräfte F A , F B und F C auf ihn.
Wenn das Gewicht in Ruhe bleibt, so gilt die vektorielle Gleichung:
FA + FB + FC = FA + FB + M g = 0
(3.54)
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
93
Decke
30
FB
45
FA
y
30
Knoten
45
FC
M
x
Abbildung 3.14: Hängendes Gewicht und dazugehörige Kräfte.
Wir wählen das Koordinatensystem, wie gezeigt, und erhalten zwei Gleichungen für die x- und y-Komponenten (Beachte das Vorzeichen!):
(
FA,x + FB,x
=0
(3.55)
FA,y + FB,y M g = 0
Mit Hilfe der Winkel (Die positive x-Richtung ist nach rechts gerichtet, und
die positive y-Richtung ist nach oben):
(
FA cos 30 + FB cos 45
=0
(3.56)
FA sin 30 + FB sin 45
Mg = 0
wobei FA und FB die Beträge der Vektoren F A und F B sind. Daher
8 p
p
>
3
2
>
<
FA +
FB
=0
2 p 2
(3.57)
>
1
2
>
: FA +
FB M g = 0
2
2
Damit gilt
r
2M g
3
p
FA =
und FB =
FA
(3.58)
2
1+ 3
Wie erwartet, ist die Kraft FB wegen des grösseren Winkels grösser als FA .
3.8.3
Die schiefe Ebene: statischer Fall
Wir betrachten einen Block der Masse M , der auf einer reibungsfreien schiefen
Ebene mit dem Neigungswinkel # ruht, weil er durch einen Faden mit einer
vertikalen Wand verbunden ist (siehe Abb. 3.15).
Die vektorielle Gleichung, die dem Gleichgewicht entspricht, lautet:
F + N + Mg = 0
(3.59)
94
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
N
M
F
y
x
#
#
Mg
Abbildung 3.15: Die schiefe Ebene.
In diesem Fall können wir das Koordinatensystem so wählen, dass die y-Achse
senkrecht zur schiefen Ebene zeigt, und die x-Achse parallel zur Ebene ist.
Dann gilt:
1. Die Normalkraft zeigt in die y-Richtung,
2. die Kraft entlang des Fadens zeigt in die x-Richtung,
3. und die Gravitationskraft muss zerlegt werden.
(Man könnte natürlich auch die y-Achse entlang der vertikalen Richtung
wählen, und dann die beiden anderen Kräfte zerlegen.)
Mit Hilfe der Zerlegung in Komponenten sieht die Gleichung der Gleichgewichtsbedingung folgendermassen aus:
(
F M g sin # = 0
(3.60)
N M g cos # = 0
d.h.
F = M g sin # und N = M g cos #
(3.61)
Wie erwartet, entsprechen den beiden extremen Fällen die Werte:
3.8.4
#= 0 :
F= 0
und
N =M g
#=90 :
F =M g
und
N= 0
Eine Rückstellkraft: Die Federkraft
Die Federkraft entspricht der Kraft, die eine Feder ausübt. Um diese von einer
Feder ausgeübten Kraft einfach zu studieren, können wir Massen an einer Feder
aufhängen.
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
95
Demonstrationsexperiment: An einer Feder aufgehängte Massen (Siehe
Abb. 3.16).
Mit Hilfe von verschiedenen aufgehängten Massen überprüfen wir, dass die
Verlängerung im ausgezogenen Zustand der Feder zur aufgehängten Masse proportional ist.
Wenn die aufgehängten Massen in Ruhe sind, ist die Vektorsumme der Kräfte,
die auf die Massen wirken, gleich null.
Wir müssen zwei Kräfte betrachten (Siehe Abb. 3.17):
1. die nach unten gerichtete Gravitationskraft und
2. die nach oben gerichtete Federkraft.
Wenn sich die Massen in Ruhe befinden, müssen die Gravitationskraft und die
Federkraft einander kompensieren. Die vektorielle Gleichung ist:
F + Mg = 0
(3.62)
wobei M die gesamte aufgehängte Masse ist.
Es folgt damit, dass der Betrag der Gravitationskraft, den wir durch die Menge
von aufgehängten Massen kontrollieren können, die Federkraft bestimmt.
Die Federkraft ist das Ergebnis der Verlängerung der Feder. Die Feder will
ihren ursprünglichen Zustand wieder herstellen.
Jetzt bemerken wir, dass sich die Feder verlängert, wenn wir mehr Masse
anhängen.
Hookesches Gesetz: Experimentell beobachtet man, dass bei kleiner
Längenänderung die Längenänderung der Feder zur wirkenden Kraft proportional ist.
Diese Beobachtung gilt für beide, positive und negative Längenänderungen (d.h.
bei ausgezogenem und zusammengedrücktem Zustand der Feder).
Das Hookesche Gesetz kann geschrieben werden als
F =
k (x
x0 ) =
k x,
(3.63)
wobei k die Federkonstante, x0 die Länge der Feder im unbelasteten Zustand
und x die Verschiebung aus der Ruhelage ist. Die SI-Einheit der Federkonstante ist N/m.
Rückstellkraft: Die Federkraft versucht, die Feder in ihren ursprünglichen
Zustand zurückzuführen.
96
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Abbildung 3.16: Demonstrationsexperiment: An einer Feder aufgehängte Massen.
Kräftediagramm:
F
x
50 g
M = gesamte
aufgehängte Masse
50 g
50 g
Mg
Abbildung 3.17: An einer Feder aufgehängte Massen.
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
97
Die Gleichung enthält deshalb ein negatives Vorzeichen (siehe Abb. 3.18):
1. Für positive x (d.h., im ausgezogenen Zustand) zeigt die Federkraft in
die negative Richtung;
2. für negative x (d.h., bei zusammengedrückter Feder) zeigt die Federkraft in die positive Richtung.
F
x = x + > x0 ) F < 0
x = x0 ) F = 0
F
x
x0
x = x < x0 ) F > 0
x+
x
Abbildung 3.18: Federkraft-Diagramm. Weil die Federkraft versucht, die Feder
in ihren ursprünglichen Zustand zurückzuführen, spricht man von Rückstellkraft.
3.8.5
Die Spannung: Fadenkräfte
Man beobachtet experimentell:
Wenn wir an einem Faden ziehen, dann spannt sich der Faden und zieht mit
einer gleich grossen, aber entgegengesetzten Kraft zurück.
Wir können uns einen Faden als eine Feder vorstellen, die eine solch grosse
Federkonstante besitzt, dass ihre Verlängerung während der Kraftwirkung vernachlässigbar ist.
Wir werden oft idealisierte masselose Fäden betrachten. D.h., die Masse
der Fäden ist viel kleiner als die Massen der Gegenstände, die an die Fäden
gebunden werden. Der E↵ekt der Massen der Fäden kann in diesem Fall vernachlässigt werden.
Ein Faden ist eine sehr bequeme Vorrichtung, um eine Kraft zu übertragen.
Wir betrachten die Situation der Abb. 3.19. Zwei Menschen ziehen an einem
Faden. Wir analysieren die Anordnung der Kräfte.
Die Kräfte müssen entlang des Fadens wirken, weil der Faden nicht seitlich
ziehen kann.
1. Der Mensch (1) zieht nach links mit einer Kraft F 1 ;
98
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
F2
F1
(1)
(2)
S2
S1
F1
S1 =
F2
S2 = S
(1)
(2)
Abbildung 3.19: Fadenkraft. Zwei Menschen ziehen am Faden.
2. Der Mensch (2) zieht nach rechts mit einer Kraft F 2
Die Kräfte sind entgegengesetzt, deshalb ist der Faden gespannt. Die Beschleunigung aF des Fadens ist (Gravitationskraft wird vernachlässigt)
mF aF = (F 1 + F 2 )
(3.64)
wobei mF die Masse des Fadens ist. Wenn wir den Faden als wirklich masselos
betrachten, gilt
(F 1 + F 2 ) = 0 ) F 1 = F 2
(3.65)
(Wenn die auf den Faden wirkende resultierende Kraft nicht gleich null ist, wäre
die Beschleunigung des Fadens wegen der verschwindenden Masse unendlich!)
Jetzt führen wir die Spannung des Fadens ein.
Wir können uns vorstellen, dass die Spannung sich im Faden befindet. Sie ist
für eine Übertragung der Kräfte durch den Faden verantwortlich. Sie wirkt entlang des Fadens, so dass ein Faden, der zwei Punkte verbindet, überall dieselbe
Spannung besitzt.
Im Punkt, wo der Mensch (1) den Faden zieht, wird die Kraft F 1 kompensiert.
Dieselbe Situation findet im Punkt (2) statt. D.h.,
F 1 + S 1 = 0 und F 2 + S 2 = 0
(3.66)
Da die Beträge von F 1 und F 2 gleich sind, gilt
|S 1 | = |S 2 | ⌘ S
(3.67)
d.h., die Spannung S entlang des ganzen Fadens besitzt überall denselben Betrag. Siehe Abb. 3.19.
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
3.9
99
Anwendung: Berechnung der Bewegungen
Die Newtonschen Gesetze sorgen für eine Verbindung zwischen (1) den dynamischen Grössen Masse und Kraft einerseits, und (2) den kinematischen Grössen
Beschleunigung, Geschwindigkeit und Verschiebung andererseits.
Wir können die Bewegungsgleichung eines Körpers, dessen Masse sich mit der
Zeit nicht ändert, direkt mit diesem Gesetz finden. Es gilt
P
i F i = ma = m
dv
d2 r
=m 2
dt
dt
(3.68)
D.h., wenn alle Kräfte (oder die resultierende Kraft) bekannt sind, die auf einen
Körper wirken, können wir die Beschleunigung des Körpers berechnen.
Oder umgekehrt, wenn wir die Beschleunigung eines Körpers, oder die zeitliche Ableitung seiner Geschwindigkeit, oder die zweite zeitliche Ableitung seiner Ortsvektorfunktion kennen, können wir die resultierende Kraft, die auf den
Körper wirkt, bestimmen.
Diese Gleichung kann auch mit Hilfe des Impulses ausgedrückt werden:
P
i
F i = ma = m
dv
d(mv)
dp
=
=
dt
dt
dt
(3.69)
wobei p der Impuls des Körpers ist. Wenn keine Kraft auf den Körper wirkt,
ist sein Impuls wie erwartet erhalten, d.h., er ändert sich nicht mit der Zeit.
3.9.1
Die reibungsfreie schiefe Ebene: dynamischer Fall
Wir haben in Kap. 3.8.3 eine Anordnung betrachtet, bei der ein Block mit
der Masse M auf einer schiefen Ebene mit dem Neigungswinkel # ruhte, weil
er durch einen Faden mit einer vertikalen Wand verbunden war. Wird nun
der Faden zerschnitten, so verschwindet die Kraft F . Die resultierende Kraft
ist nun nicht mehr gleich null, und der Block wird sich beschleunigt bewegen
(siehe Abb. 3.20). Wie gross ist seine Beschleunigung bei vernachlässigbarer
Reibung?
Die vektorielle Gleichung ist:
N + M g = F res = M a ,
(3.70)
wobei der Vektor a die Beschleunigung der Masse M ist.
Die Gleichungen mit den Komponenten sehen so aus (das Koordinatensystem
wird wie im Kap. 3.8.3 gewählt):
(
0 M g sin # = M ax
(3.71)
N M g cos # = M ay
100
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
N
y
x
#
Mg
Abbildung 3.20: Beschleunigte Bewegung auf schiefer Ebene.
Die Normalkraft wirkt so, dass die Beschleunigung in die y-Richtung verschwindet. Der Block erfährt nur eine Beschleunigung in die x- Richtung:
8
1
>
( M g sin #)
< ax =
M
(3.72)
>
:a = 1 (N M g cos #) = 0 ) N = M g cos #
y
M
Schliesslich ist
ax =
g sin #
(3.73)
Wie erwartet, entsprechen den beiden extremen Fällen die Werte:
3.9.2
#= 0 :
ax =0,
#=90 :
ax = g,
N = Mg
N =0
Bewegung mit Rollen
Wir betrachten die folgende Anordnung (Siehe Abbn. 3.21 und 3.22): auf einer
horizontalen Fläche befinde sich ein Wagen der Masse M . Durch einen über
eine Rolle geführten Faden ist er mit einer aufgehängten Masse verbunden.
Die aufgehängte Masse m kann sich in die vertikale Richtung bewegen. Wir
betrachten den Faden als masselos und die Rolle als reibungsfrei. Die Funktion
der Rolle ist es, die Spannung im Faden umzulenken.
Demonstrationsexperiment: Messung der Beschleunigung mit Wagen.
Das Kräftediagramm kann wie in Abb. 3.22 dargestellt werden. Wir bemerken,
dass die Spannung S 1 die einzige nicht verschwindende Kraft ist, die auf den
Wagen wirkt, weil die Gewichtskraft des Wagens von der nach oben gerichteten
(Normal-) Kraft, die der Tisch ausübt, kompensiert wird. Anderseits spürt
die aufgehängte Masse die nach oben gerichtete Spannung S 2 und die nach
unten gerichtete Gewichtskraft. Wenn der Faden als masselos und die Rolle
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
101
Abbildung 3.21: Messung der Beschleunigung mit Wagen.
N
S1
M
Mg
Rolle
S2
m
Reibungsfreie Rolle:
|S 1 | = |S 2 | ⌘ S
positive Richtung
Wagen
positive Richtung
mg
Abbildung 3.22: Kräftediagramm zur Messung der Beschleunigung mit Wagen.
102
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
als reibungsfrei betrachtet werden, dann wird die Rolle nur die Spannung im
Faden umlenken und es gilt |S 1 | = |S 2 | = S.
Die Bewegungsgleichung kann so ausgedrückt werden (Beachte die positive
Richtungen für die Bewegung des Wagens und der aufgehängten Masse):
8
>
= Ma
<S
(3.74)
m
>
:mg S = ma ) a =
g
M +m
Für M
m ist
m
1
g ) a / m und a /
(3.75)
M
M
Die Beschleunigung ist zum Verhältnis der Massen proportional. Wir können
sagen, dass
a⇡
1. wegen der schweren Masse m das System beschleunigt wird;
2. wegen der trägen Masse M das System gebremst“ wird. Die träge Masse
”
M des Wagens wirkt seiner Beschleunigung entgegen.
3.9.3
Die Atwoodsche Maschine
Wir betrachten die Anordnung in Abb. 3.23. Zwei Massen m1 und m2 hängen
an einem Faden. Wir nehmen an, dass der Faden masselos ist und reibungsfrei
über die Rolle gleiten kann. Eine solche Anordnung wird eine Atwoodsche
Maschine genannt.
S
h1
S
m2
m1
m1 g
m2 g
h2
positive Richtung
Rolle
Abbildung 3.23: Eine Atwoodsche Maschine mit einem masselosen Faden und
einer reibungsfreien Rolle.
Wenn der Faden immer gespannt ist, müssen die Beträge der Beschleunigungen
der Massen gleich sein und entgegengesetztes Vorzeichen besitzen. Man kann
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
103
dieses Ergebnis so beweisen: Weil wir annehmen, dass der Faden nicht dehnbar
ist, bleibt seine Länge unverändert. Es gilt (Siehe Abb. 3.23)
` = h1 + h2 +
1
(2⇡R)
2
(3.76)
wobei ` die Länge des Fadens ist, und 2⇡R der Umfang der Rolle. Mit der
zeitlichen Ableitung dieser Gleichung, finden wir
0=
d`
d
d
= h 1 + h 2 + 0 = v1 + v2
dt
dt
dt
0=
d
d
v 1 + v 2 = a1 + a2
dt
dt
(3.77)
und
) a1 =
a2
(3.78)
Weil der Faden masselos ist, ist die Spannung entlang des Fadens immer dieselbe. Wir betrachten deshalb nur einen Spannungsvektor, der nach oben zeigt.
Wir betrachten nun die Kräfte, die auf die Masse A und die Masse B wirken:
Masse A: S + m1 g = m1 a1
Masse B: S + m2 g = m2 a2
(3.79)
(3.80)
wobei S die Spannung des Fadens ist. Wir verwenden nun die Komponenten:
wir brauchen nur die vertikale Richtung. Die positive Richtung wird nach oben
gewählt.
Damit schreiben wir das System der Bewegungsgleichungen:
(
S
m1 g
= m 1 a1
S
m2 g
= m 2 a2
(3.81)
Mit der Bedingung für die Beschleunigung lautet die Bewegungsgleichung für
a1 = a2 folgendermassen:
(
S m 1 g = m 1 a1
(3.82)
S m 2 g = m 2 a1
Die Lösung ist (wir berechnen die Di↵erenz und die Summe der Gleichungen):
(
m 1 a1 + m 2 a1 = m 1 g + m 2 g
(3.83)
m1 a1 m2 a1 = 2S m1 g m2 g
d.h.
8
< a1
:
S
m2 m1
g
m2 + m1
= 12 {(m1 m2 ) a1 + (m1 + m2 ) g}
=
(3.84)
104
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Mit Algebra findet man schliesslich
a1 =
a2 =
m2 m1
g
m2 + m1
und S =
2m1 m2
g
m1 + m2
(3.85)
Die Beträge der Beschleunigungen sind einander gleich und kleiner als die Erdbeschleunigung g:
|m2 m1 |
|a1 | = |a2 | =
g<g
(3.86)
m2 + m1
Die Beschleunigung der Masse ist kleiner als die Erdbeschleunigung g. Die
Spannung wirkt immer entgegen der Gravitationskraft und bremst die Massen.
Wir verstehen dieses Ergebnis auch in den unrealistischen Grenzfällen m1 = 0
oder m2 = 0: In diesen letzten Fällen ist die Spannung gleich null, und die
Massen fallen frei mit einer Beschleunigung gleich g.
m2 = 0 ) a1 = g und a2 = g
m1 = 0 ) a1 = g und a2 = g
(3.87)
(3.88)
3.10
Eine fundamentale Kraft: die Gravitation
3.10.1
Das Newtonsche Gravitationsgesetz
Eines der grundlegendsten Probleme, das die Menschheit seit langem
beschäftigt hat, ist die Bewegung der Himmelskörper, d.h. die Planetenbewegung.
Kepler4 analysierte die astronomischen Beobachtungen von Brahe5 . Dabei fand
er empirisch drei Gesetze über die Bewegung der Planeten. Das erste Keplersche
Gesetz sagt, dass alle Planeten sich auf elliptischen Bahnen bewegen, in deren
einem Brennpunkt die Sonne ist.
Newton behauptete 1665 (als er 23 Jahre alt war), dass dieselbe Kraft für den
Fall von Körpern (z.B. ein Apfel) auf der Erde und für die Bewegung der
Planeten verantwortlich ist.
Er behauptete ferner, dass diese Kraft zwischen allen Objekten im Universum wirkt. Die Beziehung zwischen Erdbeschleunigung und Gravitationskraft
hat die Existenz einer allgemeinen, zwischen allen Körpern wirkenden, Kraft
bewiesen.
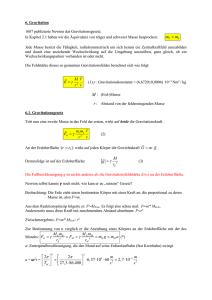
Nach dem allgemeinen Newtonschen Gravitationsgesetz ist diese Kraft
immer anziehend, proportional zu den Massen der beiden Körper und umgekehrt proportional zum Quadrat des Abstandes zwischen ihnen. Sie liegt in der
Verbindungslinie zwischen ihnen.
4
5
Johannes Kepler (1571-1630)
Tycho Brahe (1546-1601)
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
105
y
F 12 =
m1
m1
r 12
F 12
|F 12 | = |F 21 |
F 12
r1
ey
F 21
F 21
m2
m2
r2
x
ex
Abbildung 3.25: Die Gravitationskraft
ist immer anziehend, und beide Körper
spüren dieselbe Anziehungskraft, aber
mit entgegengesetztem Vorzeichen.
Abbildung 3.24: Die Definition des Vektors r 12 .
Erstmals hat Newton 1686 mit einer mathematischen Berechnung bewiesen,
dass eine solche Gravitationskraft die elliptischen Bahnen der Planeten um die
Sonne erklären kann.
In der mathematische Sprache wird die Gravitationskraft, die die (statische)
Masse m1 auf m2 ausübt, geschrieben als (siehe Abb. 3.24):
F 12 =
Gm1 m2 r 12
·
2
r12
r12
(3.89)
wobei m1 und m2 zwei Punktmassen sind, und r 12 /r12 ein Einheitsvektor, der
von m1 nach m2 zeigt (r 12 = r 2 r 1 ), und G ist die universelle Gravitationskonstante, die den Wert
G = 6,67 ⇥ 10
11
N m2 /kg2
(3.90)
hat.
Aus der Definition der Gravitationskraft kann man sehen, dass beide Körper
dieselbe Anziehungskraft, aber mit entgegengesetztem Vorzeichen (siehe Abb.
3.25) spüren:
F 12 =
F 21 ,
|F 12 | = |F 21 |.
(3.91)
Die Gravitationskraft wird von der Gegenwart anderer Massen nicht gestört:
Im Fall, dass es viele Massen in der Nähe eines Körpers gibt, ist die Gesamtgravitationskraft auf den Körper gleich der Vektorsumme aller Gravitationskräfte,
die die anderen Körper auf ihn ausüben.
106
3.10.2
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Die Erdbeschleunigung
Wir sagen, dass die Gravitationskraft eine schwache Kraft ist. Zum Beispiel
ist die Kraft zwischen zwei Studenten, die sich in einem Abstand von 1 Meter
befinden und je eine Masse von 80kg haben, ungefähr
Gm1 m2
(6,67 · 10
=
2
r
⇡ 4 · 10 7 N
|F | =
11
N · m2 kg 2 ) · (80 kg) · (80 kg)
(1 m)2
Dabei haben wir die Studenten als Punktmassen betrachtet. Ein solcher Betrag
ist praktisch unmessbar.
Die Gravitationskraftwirkung ist messbar, wenn wir grosse Massen betrachten.
Sie bindet z.B. Sterne in Galaxien (siehe Abb. 3.26), Galaxien in sogenannten
“Superclusters”, und sie ist auch verantwortlich für die Bewegung der Planeten
um die Sonne, der Satelliten um die Planeten und für den Fall der Körper auf
der Erde.
Abbildung 3.26: Eine Galaxie. Die Sterne werden durch die Gravitationskraft
zusammengehalten.
Wir spüren die Erdbeschleunigung deshalb, weil die Masse der Erde sehr gross
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
107
ist:
mE ⇡ 6,0 ⇥ 1024 kg
(3.92)
Nun verstehen wir den Betrag der Erdbeschleunigung und warum er unabhängig von der Masse eines Körpers ist.
Die Erde übt auf den Körper eine Kraft aus, die dieselbe ist, als ob ihre ganze
Masse im Zentrum der Erde konzentriert wäre (siehe Abb. 3.27).
FG
FG
rE
=
Erde
mE
Abbildung 3.27: Die Gravitationskraft der Erde.
Wir berechnen daher die Gravitationskraft, die die Erde auf eine auf der Erdoberfläche liegende Masse m ausübt, als
|F G | =
GmE m
rE2
(3.93)
wobei mE die Masse der Erde ist und rE der Radius der Erde.
Um die Erdbeschleunigung zu bestimmen, benutzen wir das zweite Newtonsche
Gesetz:
GmE m
GmE
F G = mg )
= mg ) g = 2
(3.94)
2
rE
rE
d.h., g ist unabhängig von m. Alle Körper, unabhängig von ihren Massen,
werden gleich beschleunigt.
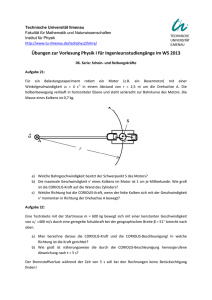
Demonstrationsexperiment: Fall in Luft oder im Vakuum
Die Fallzeit von verschiedenen Körpern mit unterschiedlichen Massen (z.B.
Vogelfedern, Papierblätter, Stein, ...) wird beobachtet. Siehe Abb. 3.28. Die
108
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Körper befinden sich in einem Glasrohr, das evakuiert werden kann. Die Messungen werden zweimal durchgeführt: das erste Mal in der Luft, und das zweite
Mal im Vakuum. In der Luft ist die Fallzeit der Vogelfedern die längste.
Experimentell wird beobachtet, dass im Vakuum die Fallzeit unabhängig vom
Körper ist.
Der Luftwiderstand ist für die beobachteten Zeitunterschiede verantwortlich.
Abbildung 3.28: Fallversuch: Die Fallzeit verschiedener Körper werden in Luft
oder im Vakuum beobachtet.
3.11
Harmonische Schwingungen
Schwingungen sind Vorgänge, bei denen sich eine physikalische Grösse in
Abhängigkeit von der Zeit periodisch ändert. Eine Schwingung kann als eindimensionale Bewegung betrachtet werden.
Bei einer Schwingung bewegt sich z.B. ein Teilchen in einer periodischen Bewegung immer nur auf demselben Weg hin und her.
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
3.11.1
109
Eine sinusförmige Bewegung
Eine Masse wird an einem Faden aufgehängt. Wenn wir die Masse aus seiner
Gleichgewichtslage auslenken und sie loslassen, schwingt sie um die Gleichgewichtslage.
Wie soll eine solche Bewegung beschrieben werden?
Demonstrationsexperiment: Schwingwagen
Ein Wagen ist mit zwei Federn verbunden. Siehe Abb. 3.29. Der Wagen wird
ausgelenkt und losgelassen. Die Auslenkung wird als Funktion der Zeit geplottet. Sie sieht sinusförmig aus.
Abbildung 3.29: Schwingwagen: Der Wagen ist mit zwei Federn verbunden.
Demonstrationsexperiment: Pendel bewegt sich sinusförmig.
Die Kreisbewegung einer Kugel wird auf die Wand projiziert. Wir vergleichen
die Bewegung des Pendels mit der Projektion der Kugel auf die Wand. Siehe
Abb. 3.30.
Experimentell beobachten wir:
Für kleine Auslenkungen ist die Pendelbewegung gleich der Projektion einer
Kreisbewegung.
Wir können die Kreisbewegung als eine zweidimensionale Bewegung betrachten. Wir wählen dafür ein Koordinatensystem. Siehe Abb. 3.31. Die Kreisbewegung der Kugel wird durch den Winkel ' parametrisiert und die Koordinaten
der Kugel sind gleich:
(
x(t) = R cos '(t)
(3.95)
y(t) = R sin '(t)
110
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Pendel
Kreisbewegung
Abbildung 3.30: Das Pendel bewegt sich sinusförmig: Die Bewegung der aufgehängten Masse (Pendel) und die Projektion der Kugel auf die Wand werden
verglichen.
wobei R der Radius des Kreises ist. Weil die Kugel mit konstanter Geschwindigkeit auf dem Kreis umläuft, ist die Winkelgeschwindigkeit konstant als Funktion der Zeit, so dass der Winkel linear mit der Zeit zunimmt (Siehe Kap.
2.7):
'(t) = !t
(3.96)
Um die Bewegung des Pendels zu beschreiben, müssen wir die Projektion der
Kreisbewegung betrachten. Wir werden z.B. die Projektion der umlaufenden
Kugel auf die y-Achse betrachten:
y(t) = R sin '(t) = R sin !t
(3.97)
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Lichtquelle
⇡
2
sin !t
y
1
'
⇡
1
2
0 x 0
1
2
!
3⇡
2
111
!t
⇡
2
⇡
3⇡
2
2⇡
5⇡
2
3⇡
-1
Abbildung 3.31: Die Pendelbewegung ist gleich der Projektion einer Kreisbewegung. Ein Punkt bewegt sich mit konstanter Geschwindigkeit auf dem Kreis.
Der Radius ist gleich 1.
Wir schliessen daraus:
Die Masse des Pendels bewegt sich sinusförmig um ihre Gleichgewichtslage.
Eine solche Bewegung ist durch den folgenden allgemeinen Ausdruck gegeben:
x(t) = A sin (!t + )
wobei A die Amplitude, ! die Kreisfrequenz und
(3.98)
die Phasenkonstante ist.
Solche Bewegungen werden harmonische Schwingungen genannt.
Oft wird der Winkel der Sinusfunktion auch als die Phase der Schwingung
bezeichnet. Hier haben wir diese Phase so ausgedrückt:
'(t) = !t +
wobei
(3.99)
die ursprüngliche Phase zur Zeit t = 0 ist. Siehe Abb. 3.32.
Obwohl wir die harmonische Bewegung durch eine Sinusfunktion definiert haben, kann sie ebenso gut durch eine Kosinusfunktion ausgedrückt werden, wobei
der einzige Unterscheid ein Phasenunterschied von ⇡/2 ist:
⇣
⇡⌘
x(t) = A cos (!t + ) = A sin !t + +
= A sin (!t + 0 )
(3.100)
2
d.h.
⇣
⇡⌘
cos ' = sin ' +
(3.101)
2
Wir bemerken schliesslich, dass harmonische Bewegungen auch als Summe von
Kosinus- und Sinusfunktionen ausgedrückt werden können. Aus der Gleichung
sin (↵ + ) = sin ↵ cos + cos ↵ sin
(3.102)
112
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
⇡
2
sin(!t + )
y
1
1
2
⇡
⇡
2
0 x
⇡
3⇡
2
2⇡
5⇡
2
!t
1
2
!
-1
3⇡
2
Abbildung 3.32: Die graphische Darstellung der ursprünglichen Phase.
folgt
x(t) = A sin (!t + )
= A sin !t cos + A cos !t sin
= (A cos ) sin !t + (A sin ) cos !t
= B sin !t + C cos !t
(3.103)
wobei B = A cos and C = A sin neue Konstanten (d.h. Amplituden) sind,
die die ursprüngliche Phase enthalten. Normalerweise werden wir nur den Ausdruck mit der Sinusfunktion und die ursprüngliche Phase verwenden.
3.11.2
Die Periode der Schwingung
Die Periode T der Schwingung ist definiert als die Zeit, die benötigt wird, um
eine vollständige Schwingung durchzuführen.
Die Sinusfunktion wiederholt sich, wenn der Winkel '(t) um 2⇡ zunimmt. D.h.,
bei einem vollständigen Zyklus erhöht sich die Phase der Sinusfunktion um 2⇡.
Zur Zeit t + T unterscheidet sich die Phase um 2⇡ von der Phase zur Zeit t:
'(t + T ) = '(t) + 2⇡
) ! · (t + T ) + = !t + + 2⇡
) !t + !T = !t + 2⇡
oder
2⇡
!
Die Frequenz ⌫ ist die Anzahl der Schwingungen pro Zeit:
!T = 2⇡
⌫=
)
T =
1
!
=
T
2⇡
Die SI-Einheit der Frequenz ist das Hertz (Hz) = 1/Sekunde .
(3.104)
(3.105)
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
3.11.3
113
Auslenkung, Geschwindigkeit und Beschleunigung
Weil die Sinusfunktion nur Werte zwischen –1 und 1 annehmen kann, ist die
grösste Auslenkung aus der Gleichgewichtslage gleich der Amplitude A, d.h.,
die Amplitude ist der Betrag der maximalen Auslenkung:
x(t) = A sin (!t + )
)
A x(t) A
(3.106)
Die Amplitude entspricht der maximalen Entfernung vom Ursprung.
Die erste zeitliche Ableitung, die die Geschwindigkeit liefert, ist gleich
v(t) =
dx
= A! cos (!t + )
dt
(3.107)
und wir erhalten:
v(t) = (A!) cos (!t + )
)
A! v(t) A!
(3.108)
In ähnlicher Weise ist die Beschleunigung gleich:
a(t) =
dv
d
=
{A! cos (!t + )} =
dt
dt
A! 2 sin (!t + ) =
! 2 x(t)
(3.109)
Wir bemerken, dass
a(t) =
A! 2 sin (!t + )
)
A! 2 a(t) A! 2
Zusammenfassend haben wir gefunden:
8
>
A sin (!t + )
<x(t) =
v(t) = A! cos (!t + )
>
:
a(t) = A! 2 sin (!t + ) =
(3.110)
(3.111)
2
! x(t)
Die Beziehungen zwischen Sinus- und Kosinus-Funktionen sind in Abb. 3.33
gezeigt. Mit diesen kann die Beziehung zwischen Auslenkung, Geschwindigkeit
und Beschleunigung graphisch verstanden werden.
Um die Diskussion zu vereinfachen, nehmen wir an, dass die Anfangsbedingungen so sind, dass die Phase verschwindet.
1. Die Auslenkung verhält sich sinusförmig. Zur Zeit t=0 ist die Auslenkung
gleich null und ihr Betrag ist maximal, wenn
⇡ 3⇡
,
, ...
(3.112)
2 2
Das System bewegt sich periodisch zwischen den maximalen Auslenkungen –A und +A.
Maximale Auslenkung: !t =
114
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
f (t) = sin !t
1
!t
2⇡
⇡
⇡
=0
2⇡
-1
f (t) = cos !t
1
!t
2⇡
⇡
⇡
= ⇡2
-1
f (t) =
2⇡
sin !t
1
!t
2⇡
⇡
⇡
=⇡
2⇡
-1
f (t) =
cos !t
1
=
2⇡
3⇡
2
!t
⇡
⇡
2⇡
-1
f (t) = sin !t
1
= 2⇡
2⇡
!t
⇡
⇡
2⇡
-1
Abbildung 3.33: Beziehung zwischen Sinus- und Kosinus-Funktionen. Die angegebene Phase
entspricht der Phasenkonstante, die eine Sinusfunktion
sin(!t + ) haben muss, um die entsprechende Funktion zu liefern.
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
115
2. Die Geschwindigkeit verhält sich kosinusförmig, d.h. sie kann als sinusförmig mit einer ursprünglichen Phase gleich ⇡/2 dargestellt werden
(siehe Abb. 3.33). Die Geschwindigkeit verhält sich periodisch zwischen
den maximalen Geschwindigkeiten (–A! und +A!). Wegen des Phasenunterschieds ist die Geschwindigkeit maximal, wenn die Auslenkung
verschwindet, und umgekehrt ist die Geschwindigkeit minimal, wenn die
Auslenkung maximal ist:
Maximale Geschwindigkeit: !t = 0, ⇡, 2⇡, . . .
(3.113)
Man kann das so verstehen: beim Nulldurchgang ist die Geschwindigkeit
maximal. Die Auslenkung nimmt zu und die Bewegung wird gebremst
bis die Geschwindigkeit verschwindet. Dieser Punkt entspricht der maximalen Auslenkung. Die Richtung der Bewegung ändert sich und die
Bewegung läuft nachher zurück: die Auslenkung nimmt ab und die Geschwindigkeit nimmt zu, bis der Nulldurchgangspunkt wieder erreicht
ist. In diesem Punkt ist die Geschwindigkeit maximal, und die Bewegung
wiederholt sich weiter.
3. Die Beschleunigung verhält sich sinusförmig, wie die Auslenkung, aber
mit entgegengesetztem Vorzeichen, d.h. sie kann als sinusförmig mit einer ursprünglichen Phase gleich ⇡ dargestellt werden (siehe Abb. 3.33).
Die Beschleunigung verhält sich periodisch zwischen den maximalen Beschleunigungen (–A! 2 und +A! 2 ). Sie ist maximal bei maximaler Auslenkung und verschwindet beim Nulldurchgang. Sie ist aber der Auslenkung immer entgegengesetzt. Die Beschleugigung wirkt der Bewegung
entgegen. Wenn die Bewegung in eine Richtung läuft, versucht die Beschleunigung die Bewegung in die entgegengesetzte Richtung zu bringen:
wenn die Auslenkung z.B. nach rechts ist, zeigt die Beschleunigung nach
links, und umgekehrt, wenn die Auslenkung nach links ist, zeigt die Beschleunigung nach rechts.
In mathematischer Form können wir die zwei Grenzfälle so zusammenfassen:
1. Bei maximaler Auslenkung (sin(!t + ) = ±1):
8
>
<x = ±A
v =0
>
:
a = ⌥A! 2
(3.114)
2. Beim Nulldurchgang (sin(!t + ) = 0):
8
>
<x = 0
v = ±A!
>
:
a =0
(3.115)
Die Geschwindigkeit verschwindet und die Beschleunigung wird maximal.
Die Geschwindigkeit wird maximal und die Beschleunigung verschwindet.
116
3.11.4
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Anfangsbedingung bei ber harmonischen Bewegung
Die Amplitude A und die Phasenkonstante sind durch die Anfangsbedingungen festgelegt. Die Kreisfrequenz ! wird durch die Lösung der Bewegungsgleichung bestimmt (Siehe Kap. 3.11.6).
Zur Zeit t = 0 ist z.B. die Auslenkung x(t = 0) gleich
x(t = 0) = A sin ⌘ x0 ,
(3.116)
wobei x0 der Anfangswert der Auslenkung ist.
Zur Zeit t = 0 ist die Geschwindigkeit
v(t = 0) = A! cos ⌘ v0 ,
(3.117)
wobei v0 die Anfangsgeschwindigkeit ist.
Mit Hilfe der Anfangsauslenkung und der Anfangsgeschwindigkeit werden die
Konstanten A und festgelegt.
Z.B. für v0 = 0:
(
x(0) = A sin = x0
v(0) = A! cos = 0
(3.118)
Damit gilt
)
v(0) = A! cos = 0
und
x(0) = A sin = A sin
Schliesslich,
3.11.5
⇣
⇣⇡ ⌘
2
=
)
⇡
2
A = x0
⇡⌘
x(t) = x0 sin !t +
= x0 cos !t
2
(3.119)
(3.120)
(3.121)
Die Kraft bei der harmonischen Bewegung
In der harmonischen Bewegung besitzt die Beschleunigung eine einfache Beziehung zur Auslenkung:
dv
d2 x
d2
= 2 = 2 {A sin (!t + )}
dt
dt
dt
2
= A! sin (!t + ) =
! 2 A sin (!t + )
a(t) =
=
!
2
x(t)
(3.122)
(3.123)
(3.124)
d.h.,
bei der harmonischen Bewegung ist die Beschleunigung proportional und entgegengesetzt zur Auslenkung.
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
117
Wir betrachten nun eine Masse, die eine harmonische Schwingungsbewegung
durchführt. Wie muss die Kraft, die auf die Masse wirkt, sein, damit die Masse
eine solche Bewegungskurve beschreibt?
Die Kraft, die auf die Masse wirken muss, damit die Masse in harmonischer
Bewegung schwingt, ist gleich:
F (t) = ma(t) = m ( ! 2 ) x(t) = ( m! 2 ) x(t)
(3.125)
Wir bemerken, dass die Kraft sich mit der Zeit ändern muss, und im Allgemeinen kann sie so ausgedrückt werden:
F (t) =
kx(t) ,
wobei k = m! 2
(3.126)
Bei der harmonischen Bewegung ist die Kraft proportional und entgegengesetzt
der Auslenkung.
D.h., wenn die Auslenkung nach rechts ist, zeigt die Kraft nach links, und wenn
die Auslenkung nach links ist, zeigt die Kraft nach rechts. Die Kraft zeigt daher
immer in die Richtung des Ursprungs.
Eine solche Kraft haben wir als Rückstellkraft bezeichnet, und wir haben sie
z.B. im Fall der Feder angetro↵en (Siehe Kap. 3.8.4).
3.11.6
Di↵erentialgleichung der harmonischen Bewegung
Mit Hilfe der Lösung einer Di↵erentialgleichung werden wir die Kreisfrequenz der Schwingung als Funktion der physikalischen Grössen der schwingenden Anordnung bestimmen.
Wir benutzen Newtons zweites Gesetz für den Fall, dass die Kraft proportional
zur Verschiebung x ist, wobei der Ursprung der x-Achse (x = 0) die Gleichgewichtslage der Masse ist:
F = kx = ma ,
(3.127)
wobei die Rückstellkraftkonstante k dem Proportionalitätsfaktor zwischen Verschiebung und Rückstellkraft entspricht. Sie kann z.B. die Federkonstante sein,
wenn wir eine Masse betrachten, die mit einer Feder verbunden ist.
Die Beschleunigung ist
a=
dv
d2 x
= 2 ,
dt
dt
(3.128)
d.h.
kx = m
d2 x
dt2
)
d2 x
k
+ x=0
2
dt
m
(3.129)
118
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
Diese Bewegungsgleichung wird eine Di↵erentialgleichung genannt. Sie stellt
eine Beziehung zwischen der Funktion x(t) und ihrer zweiten Ableitung dar.
Gesucht wird die Funktion x(t), die die Gleichung erfüllt.
Diese Funktion x(t) ist bis auf den Faktor –(m/k) gleich ihrer zweiten Ableitung:
⇣ m ⌘ d2 x(t)
x(t) =
(3.130)
k
dt2
Eine solche Bedingung erfüllen die Sinus- und Kosinusfunktionen. Wir schreiben den Ansatz
x(t) = A sin (!t + ) ,
(3.131)
wobei A die Amplitude, ! die Kreisfrequenz, und die Phasenkonstante
ist. Dieser Ansatz entspricht der Schwingung, die wir in Kap. 3.11 diskutiert
haben. Die physikalische Interpretation der Amplitude, der Kreisfrequenz und
der Phasenkonstante wurden dort schon erklärt.
Wir haben in Kap. 3.11.4 gesehen, dass die Amplitude und die Phasenkonstante durch die Anfangsbedingungen bestimmt werden. Wir wollen nun die
Kreisfrequenz der Schwingung berechnen.
Durch die Ableitung nach der Zeit erhalten wir
dx(t)
= A! cos (!t + )
dt
(3.132)
und
d2 x(t)
=
dt2
A! 2 sin (!t + ) =
! 2 x(t)
(3.133)
Wir setzen die Lösung x(t) in die Di↵erentialgleichung
d2 x
k
+ x=0
2
dt
m
(3.134)
ein und finden
A! 2 sin (!t + ) +
k
A sin (!t + ) = 0
m
(3.135)
Wir beobachten, dass die Zeitabhängigkeit verschwindet, wenn wir die Sinusfunktionen weglassen, und dass die Amplitude auch weggelassen werden kann.
Es bleibt
r
k
k
(3.136)
!2 +
=0 ) !=
m
m
D.h., die Kreisfrequenz ! ist durch die Rückstellkraftkonstante k und die Masse
m festgelegt.
Wir bemerken, dass
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)
119
1. die Kreisfrequenz von der Rückstellkraftkonstante und der inversen Masse
abhängt;
2. die Kreisfrequenz unabhängig ist von der Amplitude A der Schwingung;
3. sobald die Masse erst einmal harmonisch schwingt, führt sie diese Schwingung mit gleicher Amplitude, Kreisfrequenz und Phasenkonstante weiter.
Die entsprechende Periode der Schwingung ist:
2⇡
T =
= 2⇡
!
r
m
k
(3.137)
448
Physik, FS 2013, Prof. A. Rubbia (ETH Zürich)