Relativistische Berechnung der
Werbung

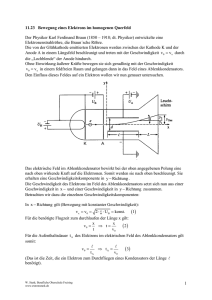
PC/031-REL Relativistische Berechnung der Elektronenstrahlablenkung in Elektronenstrahlröhren Frank Zimmermann∗ (Dated: 01.01.2006) Es wird die y–Ablenkung eines Elektronenstrahls in einer Elektronenstrahlröhre durch homogene elektrische oder magnetische Felder berechnet. Die Berechnungen werden jeweils sowohl klassisch als auch relativistisch durchgeführt und als relative Abweichung der y–Auslenkung auf der Mattscheibe in der Form r.A. = (y rel − y klass )/y klass angegeben. Abschließend wird eine tabellarische Übersicht für verschiedene Elektronenenergien angegeben. PACS numbers: NOPAC031 I. EINFÜHRUNG Im Einsteinjahr 2005 wurde oft als Beispiel für eine praktische Anwendung der Relativitätstheorie die Ablenkung des Elektronenstrahls in einem Fernseher angeführt. Die Elektronen sollten demnach wegen ihrer hohen Geschwindigkeit einer anderen Bahnkurve folgen, als bei einer klassischen Beschreibung. Allerdings wurde nie [3] der genaue Wert dieser anzubringenden Korrektur angegeben. Aus diesem Grund habe ich in den verschneiten Tagen der Jahreswende einmal durchgerechnet wie groß diese Abweichung des Elektronenstrahls bei relativistischer Berechnung auf der Mattscheibe beträgt. Ziel war die abschließende Angabe der relativen Abweichung der y–Auslenkung auf der Mattscheibe in der Form r.A. = (y rel − y klass )/y klass (1) Da je nach Anwendungsfall zur Ablenkung des Elektro~ als auch homonenstrahls sowohl homogene elektrische E ~ gene magnetische Felder B benutzt werden, wurden die Berechnungen für beide Feldarten durchgeführt. Abschließend wird eine tabellarische Übersicht für verschiedene Elektronenenergien angegeben. Zunächst die Beschreibung des gewählten Koordinatensystems: Im folgenden wird mit Laborsystem das System der Elektronenstrahlröhre und mit bewegtem System das Koordinatensystem des Elektrons beschrieben. Da hier nur die vertikale Ablenkung berechnet werden soll, bietet es sich an, die Elektronenröhre von der Seite zu betrachten: Die x−Achse liegt dann auf der Bahnkurve, die von den Elektronen bei kräftefreier Bewegung durchlaufen wird. Die positive x-Achse zeige in Richtung der Mattscheibe (x > 0). Der Nullpunkt der x-Achse ist aus praktischen Gründen der Anfang des jeweiligen Kraftfeldes, d.h. dort wo das Elektron in den Wechselwirkungsbereich des jeweiligen Feldes eintritt (x = 0). Die positive y-Achse zeige in Richtung oben und stehe ∗ Electronic address: [email protected] senkrecht auf der x-Achse. Die z-Achse stehe senkrecht auf der x-Achse und der y-Achse und definiere schließlich mit der x- und y- Achse ein positives orthogonales Dreibein. Der Koordinatenursprung liege an dem Punkt, an dem das Elektron in den Wechselwirkungsbereich der Kraftfelder eintritt. Am Punkt Pe = (xe , ye , ze ) verlasse das Elektron den Wechselwirkungsbereich und fliege kräftefrei und geradlinig weiter bis es am Punkt PM = (xM , yM , zM ) auf die Mattscheibe trifft. Das elektrische Feld habe nur eine y-Komponente: ~ = (0, Ey , 0) = (0, −E, 0) E Das homogene magnetische Feld habe nur eine zKomponente: ~ = (0, 0, Bz ) = (0, 0, B) B Die anfängliche Geschwindigkeitskomponente Elektrons sei nur in x-Richtung vorhanden des v~q = (vx , 0, 0) = (v, 0, 0) II. KLASSISCHE BESCHREIBUNG Die Kraft, die auf das bewegte Elektron mit der Ladung q = −e wirkt, wird durch die Lorentzkraft bestimmt: ~ + ~v × B) ~ F~ = q (E A. (2) Ablenkung durch ein homogenes elektrisches Feld Ist nur ein elektrisches Feld vorhanden, vereinfacht sich Gl. (2) zu ¨ =q E ~ F~ = m ·~r (3) Die Kraft wirkt auf das negative geladene Elektron nur in Richtung der y-Achse und wird daher nur in diese Richtung beschleunigt. Man erhält daher für die 3 Komponenten folgende 3 Differentialgleichungen: 2 Mit den Anfangsbedingungen Gl. (5) erhält man dann Fx = mẍ = q · 0 = 0 Fy = mÿ = q · Ey = eE Fz = mz̈ = q · 0 = 0 (4a) Aus diesem Differentialgleichungssystem erhält man mit den Anfangsbedingungen x(0) = 0, y(0) = 0, z(0) = 0, ẋ(0) = vx ẏ(0) = 0 ż(0) = 0 eE x2 2mvx2 R= (6) eE xe y (xe ) = mvx2 B. (7) (8) (11) Ausführen des Kreuzproduktes führt auf (17) y(x) = − r v 2 x ω y 0 (xe ) = q xe vx 2 ω III. − x2 + vx ω (19) (20) − x2e RELATIVISTISCHE BESCHREIBUNG Der elektromagnetische Feldtensor lautet[1] 0 Ex Ey E z −Ex 0 −Bz By = −Ey Bz 0 −Bx −Ez −By Bx 0 F µν (21) Die Lorentzkraft lautet im relativistischen Fall (12a) dabei seien vx = ẋ und vy = ẏ jeweils die Geschwindigkeitskomponenten des Elektrons in x- bzw. y-Richtung. Die 3 Komponenten der Lorentzkraft sind daher (mit B = Bz und q = −e) Fx = mẍ = q ẏB = −e ẏB Fy = mÿ = −q ẋB = e ẋB (12b) Fz = mz̈ = 0 Dieses gekoppelte Differentialgleichungssystem läßt sich nach einer weiteren Ableitung (d/dt) entkoppeln und hat dann die allgemeine Lösung (ω = eB/m) x(t) = A1 cos ωt + A2 sin ωt + A3 y(t) = B1 cos ωt + B2 sin ωt + B3 und Das Elektron folgt also bei Eintritt in das magnetische Induktionsfeld einer kreisförmigen Bahnkurve. Um den yWert (ye ) und die Steigung y 0 (xe ) beim Austritt aus dem Kraftfeld zu berechnen, kombiniert man wieder Gln. (15) und (16) und bildet die erste Ableitung an der Stelle xe . (10) Bei der Ablenkung nur durch ein homogenes magnetisches Feld [4] vereinfacht sich die Lorentzskraft zu F~ = q (êx vy Bz − êy vx Bz ), vx ω (9) Ablenkung durch ein homogenes magnetisches Feld ~ F~ = q (~v × B) (16) vx 2 = x2 (t) + (y(t) − R)2 = R2 (18) x2 (t) + y(t) − ω Dies ist bekannterweise eine Parabel. Für die Beschreibung des kräftefreien Flugs nach Verlassen des Kraftfeldes benötigt man noch die erste Ableitung am Ende des Kraftfeldes 0 vx mvx = ω eB (15) Verschiebung in y-Richtung um -R, Quadrieren der Gln. (15) und (16) und anschließende Addition zeigt dies Kombiniert man Gl. (6) mit Gl. (7) erhält man die Bahnkurve des Elektrons im klassischen Fall y(x) = Das ist eine Kreisgleichung für den Radius R = mit einem Mittelpunkt bei (0, R, 0). (5) durch einfache Integration die Lösungen x(t) = vx · t eE 2 t y(t) = 2m z(t) = 0. vx sin ωt ω vx vx vx = (1 − cos ωt) y(t) = − cos ωt + ω ω ω x(t) = (13) (14) dP µ = q F µν uν = q F µν uν dτ µ, ν = 0 . . . 3 (22) Dabei ist τ die Eigenzeit und P µ und uν jeweils eine Komponente des Viererimpulses bzw. der Vierergeschwindigkeit. Bei Gl. (22) wurde der 2. Index des elektromagnetischen Feldstärketensor mit dem metrischen Tensor (Minkowski–Metrik mit Signatur +2) nach unten gezogen und der Index der Vierergeschwindigkeit nach oben gezogen. −1 0 0 0 0 1 0 0 η µν = ηµν = (23) 0 0 1 0 0 0 0 1 3 Die initiale Vierergeschwindigkeit des Elektrons im Laborsystem ist [2] uα = (γ, γvx , 0, 0) α = 0...3 (24) 1 mit γ = √1−v , wobei v ≡ vx die Geschwindigkeit 2 des bewegten Systems (Elektron) ist und c = 1 gesetzt wurde. A. Ablenkung durch ein homogenes elektrisches Feld Mit qEy = eE liefert (22) für die x-Komponente (µ = 1) dP 1 dP x ≡ =0 dτ dτ (25) Zweimalige Integration über τ liefert mit P µ = muµ zunächst u1 ≡ ux = γvx und dann x = γvx τ (26) Die Gleichungen für die Komponenten µ = 0 ≡ t und µ = 2 ≡ y) lauten dut eE y du0 ≡ = u dτ dτ m du2 duy eE t ≡ = u dτ dτ m (27) (28) Kombiniert man die letzten beiden Gleichungen miteinander erhält man die Differentialgleichung für die Bahnkurve des Elektrons 2 eE d2 u2 d2 uy ≡ = uy (29) dτ 2 dτ 2 m Die allgemeine Lösung dieser linearen homogenen Differentialgleichung 2. Ordnung mit konstanten Koeffizienten lautet y(τ ) = c1 eωτ + c2 e−ωτ mitω = eE/m. Mit den Anfangsbedingungen von ut und uy ergibt sich die Lösung u2 ≡ uy (τ ) = γ sinh( eE τ) m (30) Integration über τ und Einsetzen der bekannten Werte für τ = x/γvx führt auf die Bahnkurve des Elektrons m eE x y= γ cosh −1 (31) eE m γvx Die Ableitung der Bahnkurve bei xe lautet 1 eE x 0 y (xe ) = sinh −1 vx m γvx (32) B. Ablenkung durch ein homogenes magnetisches Feld Die Komponenten µ = 0 und µ = 3 der Gl. (22) lauten dP t dP 0 ≡ =0 (33) dτ dτ dP 3 dP z ≡ =0 (34) dτ dτ Zweimalige Integration und Einsetzen der Anfangsbedingungen Gl. (5) ergibt u0 ≡ ut = γ u3 ≡ uz = 0 und dann t = γτ und dann z = 0 (35) (36) Der Feldstärketensor reduziert sich auf zwei Komponenten, die im Gegensatz zum elektrischen Fall aber unterschiedliche Vorzeichen besitzen F 12 ≡ F xy = −Bz F 21 ≡ F yx = Bz und (37) Die Komponenten µ = 1 und µ = 2 der Gl. (22) lauten dann dux q eB y du1 ≡ = F xy uy = u (38) dτ dτ m m duy q eB x du2 ≡ = F yx ux = − u (39) dτ dτ m m Wie im klassischen Fall kann man diese gekoppelten Differentialgleichungen durch eine weitere Ableitung (d/dτ ) entkoppeln und man erhält die beiden linearen homogenen Differentialgleichungen 2. Ordnung 2 d2 u1 d2 ux eB ≡ =− ux (40) dτ 2 dτ 2 m 2 d2 uy eB d2 u2 ≡ = − uy (41) dτ 2 dτ 2 m Diese Differentialgleichungen besitzen mit ω = eB/m als allgemeine Lösung u(τ ) = A cos ωτ + B sin ωτ (42) Mit den Anfangsbedingungen aus Gl. (5) erhält man ux (τ ) = γvx cos ωτ uy (τ ) = γvx sin ωτ (43) (44) Integration, die Anfangswerte und τ = t/γ liefern dann γvx sin ωt/γ (45) x(t) = ω γvx γvx cos ωt/γ + (46) y(t) = − ω ω Setzt man hier ω̃ = ω/γ, so erhält man die gleichen Formeln wie für den klassischen Fall (Gln. (15) und (16)) und kann das Ergebnis direkt übernehmen. r vx 2 vx y(x) = − − x2 + (47) ω̃ ω̃ y 0 (xe ) = q xe vx 2 ω̃ (48) − x2e 4 IV. V. ERGEBNISSE Die Position der Elektronen auf der Mattscheibe (bzw. die vertikale Ablenkung) erhält man aus den Ergebnissen mit yM = ye + λ · y 0 (xe ). (49) Dabei sei y 0 (xe ) die Steigung des Elektronenstrahls an dem Punkt, wo er das Wechselwirkungskraftfeld verläßt und λ = xM −xe ist die Entfernung zwischen xe und xM . Um die relative Abweichung (y rel − y klass )/y klass = (y rel /y klass ) − 1 (50) zu berechnen, werden die Lösungen (Gln. (19),(20),(32),(32),(47),(48)) jeweils über eine Taylorreihenentwicklung genähert. Für das elektrische Feld 1 1 eE 2 x = yklass (x) 2 γ 2mvx γ 1 eE 0 xe = yklass (xe ) y 0 (xe ) ≈ γmvx2 γ y(x) ≈ (51) (52) 1 eB 2 x 2 mvx eB xe y 0 (xe ) ≈ mvx 1 1 eB x2 = yklass (x) 2 γmvx γ eB 1 0 y 0 (xe ) ≈ xe = yklass (xe ) γmvx γ 1 klass y γ M (55) (56) (57) und man erhält für die relative Abweichung r.A. = rel 1 yM −1= −1 klass γ yM Obwohl in den vorgenommenen Näherungen der Korrekturfaktor (1/γ) sowohl für die Ablenkung durch ein elektrisches Feld als auch durch Ablenkung durch ein magnetisches Feld identisch ist, besteht doch ein Unterschied zwischen diesen beiden Kraftwirkungen. In Tabelle I sind für verschiedene Elektronengeschwindigkeiten die Werte für die Korrekturen durch relativistische Berechnung aufgelistet. Da sowohl y(x) als auch y 0 (x) den Faktor 1/γ enthalten, ist der Faktor in Gl. (49) bei der endgültigen Auslenkung yM ebenfalls 1/γ rel yM = Bemerkenswert ist, daß dieser Faktor (bei der vorgenommenen Näherung durch Taylorentwicklung) in keiner Weise von der Feldstärke abhängt. (54) (53) Relativistisch: y(x) ≈ Die relative Abweichung r.A. ist ein Faktor, den man mit der klassischen Lösung für die Auslenkung yM multipizieren muß, um die Abweichung zur klassischen Lösung zu erhalten. Generell führt die relativistische Berechnung zu kleineren Ablenkungen auf der Mattscheibe. Dies kann man sich damit plausibel machen, daß durch die höhere Energie/Masse das Elektron träger auf die einwirkenden Felder reagiert. Würde man in den klassischen Ergebnissen (Gl. (9),(19)) die konventionelle Masse durch eine relativistische Masse m → mγ ersetzen, so ergäbe dies für die magnetische Induktion im relativistischen Fall das richtige Ergebnis. Für die Ablenkung durch ein elektrisches Feld wäre dieses Ergebnis nur in der vorgenommenen relativistischen Näherung gültig, da das elektrische Feld stetig Arbeit an dem Elektron verrichtet und dessen Energie stetig erhöht. Für die magnetische Induktion müssen sowohl die klassische Lösung als auch die relativistische Lösung in eine Taylorreihe entwickelt werden Klassisch: y(x) ≈ DISKUSSION U in eV 5k 10k 15k 20k 25k 30k γ 1.0098 1.0196 1.0294 1.0391 1.0489 1.0587 1/γ − 1 -0.009705 -0.019223 -0.028560 -0.037629 -0.046620 -0.055445 bei 100 mm -0.97 mm -1.9 mm -2.9 mm -3.7 mm -4.7 mm -5.5 mm bei 200 mm -1.9 mm -3.8 mm -5.7 mm -7.5 mm -9.3 mm -11.1 mm Tabelle I: Abweichungen bei verschiedenen Energien und Auslenkungen (58) [1] J. D. Jackson, Klassische Elektrodynamik (de Gruyter, 2002), 3rd ed. [2] C. Misner, K. Thorne, and J. Wheeler, Gravitation (W.H. Freeman and Company, 1973). 5 [3] Zumindestens konnte ein schnelles Googeln keine Treffer liefern. [4] bzw. magnetische Induktion