Skript (Topologie, Version von 02.11.2016)
Werbung
")
MAT 701
Topologie / Geometrie
Prof. Dr. Anna Beliakova
Prof. Dr. Viktor Schroeder
Mitschrift der Vorlesung im HS11
von Markus Neumann
2. November 2016
Inhaltsverzeichnis
I
Topologie
3
1 Allgemeine Topologie
1.1 Metrische Topologie auf Rn . . . . . . . . . . . . . . . . . . .
1.1.1 Offene Mengen . . . . . . . . . . . . . . . . . . . . . .
1.1.2 Relativ offene Teilmengen . . . . . . . . . . . . . . . .
1.1.3 Abgeschlossene Teilmengen . . . . . . . . . . . . . . .
1.1.4 Relativ abgeschlossene Teilmengen . . . . . . . . . . .
1.1.5 Stetige Abbildungen zwischen Teilmengen des Rn . . .
1.2 Topologische Räume . . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Stetigkeit und Homöomorphismus . . . . . . . . . . . .
1.2.2 Charakteristische Eigenschaften . . . . . . . . . . . .
1.3 Zusammenhang . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Kompaktheit . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4.1 Trennungseigenschaften und Abzählbarkeit . . . . . . .
1.4.2 Eigenschaften der Kompaktheit . . . . . . . . . . . . .
1.5 Mannigfaltigkeiten . . . . . . . . . . . . . . . . . . . . . . . .
1.5.1 Konstruktion von neuen Mannigfaltigkeiten aus den alten
1.6 Topologische Gruppen . . . . . . . . . . . . . . . . . . . . . .
1.6.1 Wirkung von G auf X . . . . . . . . . . . . . . . . . .
4
5
5
6
8
8
9
10
12
13
14
17
19
20
22
24
26
26
2 Zell- und Simplizialkomplexe
2.1 Zellzerlegungen und CW-Komplexe . . . . . .
2.1.1 CW-Komplexe . . . . . . . . . . . . .
2.1.2 Klassifikation der 1-Mannigfaltigkeiten
2.2 Simplexe . . . . . . . . . . . . . . . . . . . . .
2.3 Simplizialkomplexe . . . . . . . . . . . . . . .
2.3.1 Simpliziale Abbildungen . . . . . . . .
2.3.2 Unterteilungen: . . . . . . . . . . . . .
28
28
29
30
30
33
35
37
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2.4
Zusätzlicher Stoff . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.4.1 Simpliziale Flächen . . . . . . . . . . . . . . . . . . . . 40
3 Klassifikation von Flächen
3.1 Konstruktion von Flächen durch Kleben
3.2 Intrinsische Eigenschaften von Flächen .
3.3 Klassifikation von kompakten Flächen . .
3.4 Euler Charakteristik . . . . . . . . . . .
.
.
.
.
42
42
51
52
59
4 Beweis des Hauptsatzes und simplizialer Gauss-Bonnet Satz
4.1 Beweis des Hauptsatzes . . . . . . . . . . . . . . . . . . . . . .
4.2 Flächen mit Rand . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Simpliziale Krümmung und simplizialer Gauss-Bonnet Satz . .
4.4 Zusätzlicher Stoff: Brouwer Fixpunktsatz . . . . . . . . . . . .
61
61
66
66
67
2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Teil I
Topologie
3
Kapitel 1
Allgemeine Topologie
Der Begriff Topologie stammt aus dem Griechischen (topos = Ort, logos =
Lehre) und bezeichnet die Wissenschaft über den Raum.
In der Geometrie sind zwei Objekte äquivalent, falls sie kongruent sind. So
sind z.B. zwei Dreiecke äquivalent, falls man sie aus Papier ausschneiden und
aufeinander legen kann und sie punktweise übereinstimmen.
In der Topologie betrachtet man Objekte bis auf eine andere Äquivalenzrelation, gegeben durch stetige Deformation. Man kann sich die Objekte als
Gummimasse vorstellen, welche man ziehen, stauchen, verbiegen und drehen
kann, (nur nicht zerschneiden), und wenn nach all diesen Deformationen zwei
Objekte übereinstimmen, so sind sie topologisch äquivalent. Wir befassen uns
Abbildung 1.1: Kreis und Quadrat sind äquivalent
in der Topologie mit “wesentlichen” Eigenschaften eines Raumes.
Topologie entstand im 19. Jahrhundert aus der Analysis und den Differentialgleichungen.
Das Problem: Den Lösungsraum einer Differentialgleichung verstehen.
Zum Beispiel:
• Kann man durch Deformation von einer Lösung zu jeder anderen gelangen?
4
• Ist der Lösungsraum zusammenhängend, kompakt, offen oder abgeschlossen?
1.1
Metrische Topologie auf Rn
Beispiel. n = 1:
(a, b) = {x ∈ R | a < x < b} offenes Intervall
[a, b] = {x ∈ R | a ≤ x ≤ b} abgeschlossenes Intervall
1.1.1
Offene Mengen
Definition 1.1. Sei p ∈ Rn , r > 0.
Or (p, Rn ) = Or (p) = {x ∈ Rn | ||x − p|| < r} heisst offener Ball mit Zentrum
p und Radius r.
Or (p, Rn ) = Or (p) = {x ∈ Rn | ||x − p|| ≤ r} heisst abgeschlossener Ball.
Definition 1.2. Eine Teilmenge A ⊂ Rn ist offen ⇔ ∀p ∈ A ∃ > 0 :
O (p) ⊂ A
Beispiel.
• Rn ist offen in Rn . (Für jeden Punkt p ∈ R kann man einen
beliebigen Radius r nehmen und Or (p) liegt immer noch in Rn )
• R ist nicht offen in R2 , da jeder Punkt x ∈ R in R2 durch (x, 0) identifiziert wird und daher ist für jeden Radius r Or ((x, 0)) keine Teilmenge
von R,, da (x + r, r) ∈
/ R.
• ∅ ist offen, da keine Punkte enthalten sind und damit die Aussage
immer wahr ist.
Lemma 1.3. Ein offener Ball ist offen.
Beweis. Seien x ∈ Rn und 0 < r ∈ R beliebig.
Wir betrachten Or (x) ⊂ Rn .
Zu Zeigen: ∀y ∈ Or (x)∃ > 0 : O (y) ⊂ Or (x).
Sei < r − ||y − x||. Dann gilt:
∀z ∈ O (y) :
||z − x|| ≤ ||z − y|| + ||y − x|| < + ||y − x|| < r − ||y − x|| + ||y − x|| = r
| {z }
<
⇒ z ∈ Or (x)
⇒ O (y) ⊂ Or (x)
5
Eigenschaften von offenen Teilmengen des Rn :
• Rn ist offen
• ∅ ist offen
• Eine Vereinigungen von offenen Mengen ist offen (auch unendlich viele)
• Eine Schnittmenge endlich vieler offener Mengen ist offen
1.1.2
Relativ offene Teilmengen
Definition 1.4. Sei A ⊂ Rn
Or (p, A) := Or (p) ∩ A = {x ∈ A | ||x − p|| < r} heisst offener Ball in A mit
Zentrum p und Radius r.
Definition 1.5. Sei A ⊂ Rn
Eine Teilmenge S ⊂ A ist relativ offen bezüglich A (oder offen in A) ⇐⇒
i) ∃ eine offene Menge U ⊂ Rn , so dass S = U ∩ A
ii) ∀p ∈ S ∃p > 0 : Op (p, A) ⊂ S
6
Beispiele. Sei A = [0, 4] × [0, 4]
Abbildung 1.2: O1 ((2, 2), A) ist relativ offen
Abbildung 1.3: O1 ((0, 2), A) ist relativ offen
(Diese Bälle sehen nicht unbedingt wie Bälle aus)
Lemma 1.6. i) ⇐⇒ ii)
Beweis. i) ⇒ ii)
∃U ∈ Rn offen, mit S = U ∩ A.
∀p ∈ S ⇒ p ∈ U . Da U offen ⇒ ∃ > 0 : O (p) ⊂ U ⇒ O (p) ∩ A =
O (p, A) ⊂ S
ii) ⇒ i)
∀p ∈ S ∃p > 0 : Op (p, A) ⊂ S
S
Sp∈S Op (p, A) ⊂ S undSes gilt:
p∈S Op (p, A) ⊃ SS⇒
p∈S Op (p, A) = S
Sei U ⊂ Rn , U := p∈S Op (p, Rn ).
S
n
U ist offen und U ∩ A =
O
(p,
R
)
∩A
p
p∈S
S
= p∈S Op (p, A) = S
7
Eigenschaften:
• A und ∅ sind offen in A. (A kann auch abgeschlossen sein bezüglich Rn
und ist doch relativ offen in A!)
• Eine Vereinigung von relativ offenen Teilmengen von A ist offen in A.
• Eine Schnittmenge von endlich vielen relativ offenen Teilmengen von
A ist offen in A.
1.1.3
Abgeschlossene Teilmengen
Definition 1.7. Eine Teilmenge C ⊂ Rn ist abgeschlossen in Rn , falls Rn \C
offen ist.
Beispiele.
• ∅, Rn sind abgeschlossen. (Rn \ ∅ = Rn , Rn \ Rn = ∅)
• p ∈ Rn ist abgeschlossen.
• [a, b] ⊂ R ist abgeschlossen, da (−∞, a) ∪ (b, ∞) offen ist.
Lemma 1.8.
i) ∅, Rn sind abgeschlossen
ii) Eine Vereinigung von endlich vielen abgeschlossenen Mengen ist abgeschlossen.
iii) Der Durchschnitt von abgeschlossen Mengen ist abgeschlossen.
1.1.4
Relativ abgeschlossene Teilmengen
Definition 1.9. Sei A ⊂ Rn . Eine Teilmenge C ⊂ A ist relativ abgeschlossen in A, falls:
i) die Menge A \ C relativ offen in A ist.
ii) ∃ eine abgeschlossene Teilmenge D ⊂ Rn : C = D ∩ A
Lemma 1.10. i) ⇔ ii)
8
Beweis. i) ⇒ ii):
A \ C ist offen in A
⇒ ∃U ⊂ Rn offen mit A \ C = U ∩ A
⇒A\U =C
Sei D := Rn \ U abgeschlossen.
D ∩ A = (Rn \ U ) ∩ A
= (Rn ∩ A) \ U
=A\U =C
ii) ⇒ i):
∃D ⊂ Rn abgeschlossen mit C = D ∩ A
Sei U := Rn \ D offen
A \ C = A \ (D ∩ A) = A \ D = A ∩ (Rn \ D) = A ∩ U
⇒ A \ C ist offen.
Beispiele.
• [a, b) ⊂ R ist weder offen noch abgeschlossen.
• Für c < a ist [a, b) ⊂ [c, b) abgeschlossen in [c, b), da [c, a) offen in [c, b).
Eigenschaften:
• A, ∅ abgeschlossen in A
• Eine Vereinigung von endlich vielen in A abgeschlossenen Teilmengen
von A ist abgeschlossen in A
• Der Durchschnitt von abgeschlossenen Teilmengen von A ist abgeschlossen in A
Definition 1.11. Sei D ⊂ A ⊂ Rn .
Der Abschluss D von D in A ist der Durchschnitt aller abgeschlossenen
Teilmengen von A, die D enthalten.
Beispiele. Seien D = (0, 1), A = [0, 1) und A0 = (0, 1]
Finde D in A und in A0
DA = [0, 1), DA0 = (0, 1]
1.1.5
Stetige Abbildungen zwischen Teilmengen des Rn
Definition 1.12. Seien A, B ⊂ Rn und f : A → B eine Abbildung.
f ist stetig falls
9
1. ∀p ∈ A : ∀ > 0 ∃δ > 0 : ||x − p|| < δ ⇒ ||f (x) − f (p)|| < 2. ∀U ⊂ B offen ⇒ f −1 (U ) ⊂ A offen
3. ∀p ∈ A und ∀U ⊂ B offen mit f (p) ∈ U ⇒ ∃V ⊂ A offen mit p ∈ V
und f (V ) ⊂ U
Satz 1.13. 1. ⇔ 2. ⇔ 3.
Beweis. In Analysis I
Eigenschaften:
• f ◦ g stetig ⇐ f und g stetig
• f : A → B ist
offen
abgeschlossen
offen
offen
⇔ ∀U ⊂ A abgeschlossen
⇒ f (U ) ⊂ B abgeschlossen
Die einzige Eigenschaft von Rn , die bis jetzt benutzt wurde, ist die Existenz einer Metrik. Von daher, alle Definitionen lassen sich direkt auf einen
beliebigen metrischen Raum verallgemeinern.
Definition 1.14. Ein metrischer Raum ist ein Raum M zusammen mit einer
Funktion d : M × M → R, die die folgende drei Eigenschaften für alle
x, y, z ∈ M erfüllt.
Symmetrie: d(x, y) = d(y, x)
Positivität: d(x, y) ≥ 0 und d(x, y) = 0 ⇐⇒ x = y
Dreiecksungleichung: d(x, z) ≤ d(x, y) + d(y, z)
In dem Euklidischen Raum Rn , d(x, y) := ||x − y||.
1.2
Topologische Räume
Definition 1.15. Ein topologischer Raum (X, τ ) ist eine Menge X versehen
mit einer Familie τ von Teilmengen von X, die die folgenden Axiomen erfüllt:
1. ∅ ∈ τ und X ∈ τ .
S
2. {Ui }i∈I ⊂ τ ⇒ i∈I Ui ∈ τ , wobei I eine Indexmenge ist.
T
3. {Ui }i∈I ⊂ τ ⇒ i∈I Ui ∈ τ , wobei I eine endliche Indexmenge ist.
10
Die Menge τ heisst eine Topologie auf X und die Mengen in τ heissen offene
Teilmengen von X.
Eine Menge heisst abgeschlossen, wenn ihr Komplement in X offen ist.
Beispiele.
1. Sei X eine Menge. Die Familie von Teilmengen τ = {∅, X}
ist eine Topologie auf X, die als triviale Topologie bekannt ist.
2. Sei X eine Menge. Die Potenzmenge P(X) (d.h. die Menge aller Teilmengen von X) ist eine Topologie auf X, die als diskrete Topologie
bekannt ist.
3. Sei X = {1, 2, 3}. Die folgenden Familien von Teilmengen sind Topologien auf X:
• τ1 = {∅, X}.
• τ2 = {∅, {1}, X}.
• τ3 = {∅, {1}, {2}, {1, 2}, X}.
• τ4 = P(X).
Die folgenden Mengen sind keine Topologien auf X:
• τ5 = {∅, {1}, {2}, X} (da {1} ∪ {2} = {1, 2} ∈
/ τ5 ).
• τ6 = {∅, {1, 2}, {1, 3}, X} (da {1, 2} ∩ {1, 3} = {1} ∈
/ τ6 ).
4. Sei (X, τ ) ein topologischer Raum und Y eine Menge und sei q : X → Y
eine surjektive stetige Abbildung. Die Quotiententopologie auf Y ist
eine Familie von Teilmengen
U ∈ Y so dass q −1 (U ) ∈ τ .
5. Sei (X, τ ) ein topologischer Raum und A ⊂ X. In der Teilmengetopologie auf A eine Menge U ⊂ A ist offen falls sie sich als der Durchschnitt
einer offenen Menge in X mit A schreiben lässt.
Sei (X, τ ) ein topologischer Raum. Eine Familie B ⊂ τ von Teilmengen
von X heisst eine Basis der Topologie τ falls jede offene Menge in X eine
Vereinigung der Elemente aus B ist.
Eine Familie S ⊂ τ ist eine Subbasis, falls endliche Schnitte der Mengen
aus S eine Basis der Topologie τ bilden.
11
Proposition 2.44 in [Lee11] gibt ein notwendiges und hinreichendes Kriterium dafür, wann eine Familie B eine Topologie auf X erzeugt. Hingegen,
für jede Familie S ⊂ P(X), es existiert eine einzige Topologie τ (S) auf X,
für die S die Subbasis ist.
Beispiele.
• B = X ist eine Basis der trivialen Topologie.
• Der Menge aller einelementigen Teilmengen ist eine Basis der diskreten
Topologie.
• Sei X = Rn . Die Menge B = {Or (p) | ∀p ∈ Rn und ∀r > 0} ist eine
Basis der Topologie auf Rn .
• Sei A ⊂ Rn . Die Menge B = {Or (p, A) | ∀p ∈ Rn und ∀r > 0} ist eine
Basis der Teilmengetopologie von Rn .
• Seien (X, τX ) und (Y, τY ) zwei topologische Räume. Die Produkttopologie τX×Y auf dem kartesischen Produkt X × Y ist die Topologie, die
durch
BX×Y := {U × V | U ∈ τX und V ∈ τY }.
erzeugt ist.
1.2.1
Stetigkeit und Homöomorphismus
Definition 1.16. Seien X, Y zwei topologische Räume und f : X → Y eine
Abbildung. Die Abbildung f ist stetig falls ∀ U ⊂ Y offen ⇒ f −1 (U ) ⊂ X
offen.
Definition 1.17. Seien X, Y zwei topologische Räume und f : X → Y eine
Abbildung. Die Abbildung f ist ein Homöomorphismus falls sie bijektiv und
sowohl f als auch f −1 stetig sind.
Bemerkung. Falls ein Homöomorphismus f : X → Y existiert, dann sagt
man “X ist homöomorph zu Y ” und schreibt X ≈ Y .
Dies definiert eine Äquivalenzrelation.
Beispiele.
1. (a, b) ≈ R ∀a, b ∈ R :
f:
π π
(a, b) → − ,
2 2
12
g:
g◦f :
π
π(b + a)
x 7→
x−
b−a
2(b − a)
π π
→R
− ,
2 2
x 7→ tan(x)
(a, b) → R ist Homöomorphismus
2.
g:
[0, 1] ∪ (2, 3] → [0, 2]
x,
x ∈ [0, 1]
x 7→
x − 1, x ∈ (2, 3]
• g ist injektiv und surjektiv ⇒ bijektiv
• g ist stetig
• g ist jedoch kein Homöomorphismus, da
g −1 : [0, 2] → [0, 1] ∪ (2, 3] nicht stetig:
U = (0, 1] ist offen in [0, 1] ∪ (2, 3]
(g −1 )−1 (U ) = (0, 1] ist nicht offen in [0, 2].
1.2.2
Charakteristische Eigenschaften
Seien X, Y, Z topologische Räume.
Produkttopologie
Charakteristische Eigenschaft: Eine Abbildung f : Y → X1 × X2 ist stetig
⇐⇒ πi ◦ f stetig für i = 1, 2 sind, wobei πi : X1 × X2 → Xi die kanonischen
Projektionen sind.
Die Produkttopologie ist die einzige Topologie auf X1 × X2 , die charakteristische Eigenschaft hat.
Wenn jeder Xi entweder Hausdorff oder zweitabzählbar ist, so ist auch
der Produkt.
Quotiententopologie
Eine Abbildung q : X → Y heisst Quotientenabbildung, falls sie surjektiv ist
und Y mit der Quotiententopologie versehen ist.
13
Charakteristische Eigenschaft: Sei q : X → Y eine Quotientenabbildung.
Eine Abbildung f : Y → Z ist stetig ⇐⇒ f ◦ q stetig ist.
Die Quotiententopologie ist die einzige Topologie auf Y , die die charakteristische Eigenschaft hat.
Teilmengetopologie
Sei (X, τ ) ein topologischer Raum und A ⊂ X mit i : A → X die Inklusion.
Charakteristische Eigenschaft: Eine Abbildung f : Y → A ist stetig ⇐⇒ i ◦ f
stetig ist.
Die Teilmengetopologie ist die einzige Topologie auf A, die charakteristische Eigenschaft hat.
Eine stetige injektive Abbildung f : A → X, die ein Homöomorphismus
auf dem Bild ist, heisst topologische Einbettung.
1.3
Zusammenhang
Definition 1.18. Sei X ein topologischer Raum.
X ist zusammenhängend wenn es keine disjunkte Vereinigung von zwei nicht
leeren offenen Mengen ist.
X nicht zusammenhängend ⇒SX besteht aus Zusammenhangskomponenten Xi , wobei Xi ∩ Xj = ∅, X = i Xi , Xi 6= ∅. Die Zusammenhangskomponenten Xi sind offen und abgeschlossen.
Beispiel. Eine zusammenhängende Teilmenge des R ist ein Intervall.
Satz 1.19. Seien A, B zwei topologische Räume, und f : A → B stetig.
Dann gilt: A zusammenhängend ⇒ f (A) zusammenhängend.
Korollar 1.20. Jeder topologische Raum, der homöomorph zu einem zusammenhängenden Raum ist, ist zusammenhängend.
Beweis. Sei f (A) nicht zusammenhängend. Dann besteht f (A) aus disjukten
Komponenten, d.h.:
disjunkte Vereinigung
f (A) = V
t
W mit V, W 6= ∅.
−1
−1
A = f (V ) ∪ f (W ), da f stetig ist, folgt f −1 (V ) und f −1 (W ) sind offen
in A, und disjunkt (warum?) ⇒ A nicht zusammenhängend. 14
Definition 1.21. Sei A ein topologischer Raum, und x, y ∈ A.
Ein Weg von x nach y in A ist
c : [0, 1] → A stetig mit c(0) = x und c(1) = y.
Definition 1.22. A ist wegzusammenhängend falls ∀x, y ∈ A ∃ ein Weg
von x nach y.
Beispiel. Rn ist wegzusammenhängend.
x1
y1
..
..
x = . , y = .
xn
yn
y 1 − x1
x1
c(t) = t · ... + ... Gerade
y n − xn
xn
Lemma 1.23. Ein wegzusammenhängender topologischer Raum ist zusammenhängend.
Beweis. Sei A wegzusammenhängend.
Annahme: A ist nicht zusammenhängend.
⇒ A = A1 t A2 , Ai 6= ∅.
Sei x ∈ A1 , y ∈ A2 . ⇒ ∃c : [0, 1] → A, 0 7→ x, 1 7→ y.
Wegen der Stetigkeit von c([0, 1]) ⊂ A = (c([0, 1]) ∩ A1 ) t (c([0, 1]) ∩ A2 ) ⇒
{z
} |
{z
}
|
c([0, 1]) ist nicht zusammenhängend.
offen nach Definition
offen nach Definition
Die Umkehrung ist falsch: Nicht jede zusammenhängende Menge ist wegzusammenhängend.
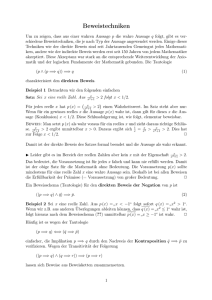
Beispiel.
p = (0, 1) ∈ R2
K : = {p} ∪ [0, 1] × {0} ∪
∞ [
1
n=1
15
n
× [0, 1]
Abbildung 1.4: K zusammenhängend, aber nicht wegzusammenhängend.
Behauptung: K ist zusammenhängend.
Beweis. Annahme: K ist nicht zusammenhängend.
⇒ K = A t B mit A, B offen, p ∈ A
1. A \ {p} =
6 ∅
Betrachte K \ {p}
⇒ K \ {p} = (A \ {p}) t B
A \ {p} offen in K \ {p}
⇒ K \ {p} ist nicht zusammenhängend.
aber nach der Konstruktion von K ist K \ {p} wegzusammenhängend.
2. A = {p}
Da A offen ⇒ ∃ > 0 : O (p, K) ⊂ A
Da A = {p} ⇒ O (p, K) =
1{p}, dies widerspricht der Konstruktion
von K, da ∀ > 0 ∃n ∈ N : n × [0, 1] ∩ O (p, K) 6= ∅. Lemma 1.24. K ist nicht wegzusammenhängend.
Beweis. Annahme: K ist wegzusammenhängend.
⇒ ∃c : [0, 1] → K : c(0) = p, c(1) = (1, 1).
1. c ∩ ([0, 1] × {0}) = ∅
Sei π1 : R2 → R die Projektion auf die x-Achse
f1 := π1 ◦ c : [0, 1] → R ist stetig mit f1 (0) = 0 und f1 (1) = 1.
Nach dem Mittelwertsatz gilt:
∀r ∈ [0, 1]∃a : f1 (a) = r
Sei r ∈ R \ Q ⇒ r ∈
/K
2. c ∩ ([0, 1] × {0}) 6= ∅
c−1 ([0, 1] × {0}) ist abgeschlossene Teilmenge von [0, 1].
⇒ dies ist ein abgeschlossenes Intervall, z.B. [w, z]
16
da c(0) = p ∈
/ c−1 ([0, 1] × {0}) gilt, dass w > 0.
2
Sei π2 : R → R die Projektion auf die y-Achse.
f2 := π2 ◦ c : [0, 1] → [0, 1] ist stetig mit f2 (0) = 1 und f2 (w) = 0.
Nach dem Mittelwertsatz ∃d ∈ [0, w] : f2 (d) = 21
⇒ c([0, d]) ∩ ([0, 1] × {0}) = ∅
Nun sind wir wieder im Fall 1.
c|[0,d] : [0, d] → K ergibt den selben Widerspruch wie bei 1.
Mittelwertsatz: Sei [a, b] ⊂ R, f : [a, b] → R stetig.
∀z zwischen f (a) und f (b) ∃c ∈ [a, b] : f (c) = z
Beweis. [a, b] ist zusammenhängend ⇒ f ([a, b]) ist auch zusammenhängend.
⇒ f ([a, b]) ist ein Intervall
(da jede zusammenhängende Teilmenge von R ein Intervall ist.)
⇒ f (a) ∈ f ([a, b]) 3 f (b) ⇒ ∀z zwischen f (a) und f (b) ⇒ z ∈ f ([a, b])
Eigenschaften. Seien A, B zwei topologische Räume und f : A → B stetig.
• A (weg)zusammenhängend ⇒ f (A) (weg)zusammenhängend.
• A (weg)zusammenhängend ⇒ A (weg)zusammenhängend.
• A, B (weg)zusammenhängend ⇒ A × B (weg)zusammenhängend.
• A (weg)zusammenhängend ⇒ jeder Quotient von A ist (weg)zusammenhängend.
• Sei {Ai }i∈I eine Familie von (weg)zusammenhängenden
Teilmengen von
S
A, die einen Punkt gemeinsam haben ⇒ i∈I {Ai } ist (weg)zusammenhängend.
1.4
Kompaktheit
Definition 1.25. Sei A ein topologischer Raum.
Eine Familie von Teilmengen {Ai }i∈I von A heisst eine Überdeckung von A
wenn
[
A=
Ai .
i∈I
Eine Überdeckung ist endlich, falls |I| < ∞.
Eine Überdeckung ist offen, falls Ai offen ∀i ∈ I.
17
Sind {Ai }i∈I und {Cj }j∈J Überdeckungen von A, so heisst {Cj }j∈J eine Teilüberdeckung von {Ai }i∈I , falls
∀j ∈ J ∃i ∈ I : Cj = Ai .
Definition 1.26. Sei A ein topologischer Raum. A ist kompakt, wenn jede
offene Überdeckung von A eine endliche Teilüberdeckung besitzt.
Bemerkung. Es ist nicht einfach, mit der Definition zu zeigen, dass eine
Menge kompakt ist, da man für alle Überdeckungen eine endliche Teilüberdeckung finden muss.
Einfacher ist es, mit Hilfe der Definition zu zeigen, dass etwas nicht kompakt
ist.
Beispiele.
1. A = {p1 , ..., pn } ⊂ R, kompakt.
Sei {Ai }i∈I eine offene Überdeckung von A.
⇒ ∀pk ∈SA ∃Aik : p ∈ Aik
Also ist nk=1 Aik = A eine endliche Teilüberdeckung.
2. (0, 1) ⊂ R ist nicht kompakt:
n
), ...} eine Überdeckung von (0, 1)
Sei U = {(0, 21 ), (0, 23 ), ..., (0, n+1
Annahme: Es existiert eine endliche Teilüberdeckung. Sei N die grösste
Zahl, so dass (0, NN+1 ) ⊂ {Teilüberdeckung} ⇒ (0, 1) * (0, NN+1 ) 3. Rn ist nicht kompakt
Satz 1.27. Seien X, Y zwei topologische Räume und sei f : X → Y stetig.
Aus der Kompaktheit von X folgt, dass f (X) kompakt ist.
Korollar 1.28. Jeder topologische Raum, der homöomorph zu einem kompakten Raum ist, ist kompakt.
Beweis. Sei U = {Ui }i∈I eine offene Überdeckung von f (X).
Zu Zeigen: U besitzt eine endliche Teilüberdeckung.
f −1 (Ui ) ist offen in X (da f stetig ist).
{f −1 (Ui )}i∈I ist eine offene Überdeckung von X.
Da X kompakt ist, existiert eine endliche Teilüberdeckung.
D.h. X = f −1 (Ui1 ) ∪ . . . ∪ f −1 (Uim )
S
Sm
oder f (X) = f (f −1 (Ui1 ) ∪ . . . ∪ f −1 (Uim )) = m
k=1 (Uik ∩ f (X)) =
k=1 Uik
das ist eine endliche Teilüberdeckung von f (X).
18
1.4.1
Trennungseigenschaften und Abzählbarkeit
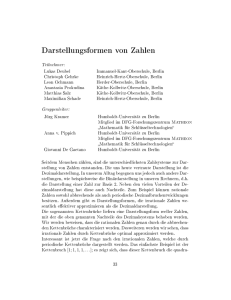
Definition 1.29. Ein topologischer Raum X heisst Hausdorff (oder T2),
wenn es ∀p1 , p2 ∈ X mit p1 6= p2 offene Umgebungen U1 3 p1 und U2 3 p2
mit U1 ∩ U2 = ∅ gibt.
U1
X
U2
•
p1
•
p2
Abbildung 1.5: Das Trennungsaxiom für einen Hausdorff-Raum
Beispiel. Jeder metrische Raum ist Hausdorff (z.B. Rn ).
Definition 1.30. Ein topologischer Raum X heisst zweitabzählbar (engl.
second countable), wenn er das zweite Abzählbarkeitsaxiom erfüllt, d.h., wenn
seine Topologie eine abzählbare Basis besitzt.
Definition 1.31. Sei ein topologischer Raum X und eine Folge {xi }i∈N von
Punkten in X. Ein Punkt x ∈ X ist der Häufungspunkt der Folge, wenn es
für jede Umgebung U von x eine N ∈ N gibt, so dass xi ∈ U für jede i ≥ N .
Definition 1.32. Sei X ein topologischer Raum.
• X heisst häufungspunktskompakt (engl. limit point compact), wenn
jede unendliche Teilmenge von X ein Häufungspunkt in X hat.
• X heisst folgenkompakt ( sequentially compact), wenn jede Folge in X
eine Teilfolge hat, die zu einem Punkt in X konvergiert.
Bemerkung.
• X topologischer kompakter Raum ⇒ X häufungspunktskompakt.
• Für metrische oder zweitabzählbare Räumen stimmen alle Begriffe von
Kompaktheit (Überdeckungs-, Häufungspunkts- und Folgenkompaktheit) überall.
19
1.4.2
Eigenschaften der Kompaktheit
Lemma 1.33. Sei X ein Hausdorff-Raum und seien A, B ⊂ X disjunkt und
kompakt. ⇒ Es gibt disjunkte offene Teilmengen U, V ⊂ X, so dass A ⊂ U
und B ⊂ V .
Beweis. Wir nehmen B = {q} an. Da X Hausdorff ist, gibt es für jeden
p ∈ X disjunkte offene Teilmengen Up und Vp mit Up 3 p und Vp 3 q.
Die Familie von Teilmengen {Up | p ∈ A} ist eine Überdeckung von A. Da A
kompakt ist, gibt es eine offene Teilüberdeckung {Up1 , . . . , Upn } für eine n ∈ N
e = Sn Up und Ve = Tn Vp . Per Konstruktion
mit p1 , . . . , pn ∈ A. Sei U
i
i
i=1
i=1
e und Ve disjunkte offene Mengen mit A ⊂ U
e und B ⊂ Ve .
sind U
Sei B eine kompakte Menge. Aus dem ersten Fall gilt es, dass es für jede
eq , Veq ⊂ X mit A ⊂ U
eq und q ∈ Veq gibt. Da
q ∈ B disjunkte offene Mengen U
B kompakt ist, gibt es eine endliche Teilfamilie {Veq1 , . . . , Veqk } (für k ∈ N)
T e
von der Familie {Veq | q ∈ B}, die B überdeckt. Wir setzen U = ki=1 U
qi und
Sk e
V = i=1 Vqi ein, und das Lemma ist bewiesen.
Lemma 1.34. Sei X ein topologischer Raum.
(a) Sei A ⊂ X kompakt und X Hausdorff ⇒ A ist abgeschlossen.
(b) Sei A ⊂ X abgeschlossen und X kompakt ⇒ A ist kompakt.
Beweis. (a) Für jeden Punkt x ∈ X \ A gibt es disjunkte offene Mengen
U und V , so dass A ⊂ U und p ∈ V (Lemma 1.33). Die Menge X \ A
ist offen, da für jeden x ∈ X \ A eine offene Umgebung in A (die Menge
V ) gibt. Deshalb ist die Menge A abgeschlossen.
(b) Sei {Ui }i∈I eine Überdeckung von A. Dann ist die Familie von Mengen
{Ui }i∈I ∪ (X \ A) eine Überdeckung von X. Da X kompakt ist,
Sngibt es
eine endliche S
Teilüberdeckung von X, die entweder die Form i=1 Ui ∪
(X \ A) oder ni=1 Ui für eineSn ∈ N hat. In beiden Fällen ist die Menge
A von der endlichen Familie ni=1 Ui überdeckt, d.h., A ist kompakt.
Definition 1.35. Sei (X, d) ein metrischer Raum und A ⊂ X.
A ist beschränkt, wenn ein R > 0 und ein x ∈ X existieren, s.d. d(x, a) < r
für jeden a ∈ A.
Wenn keine solchen R und x existieren, ist A unbeschränkt.
Beispiel. Jeder offene Ball ist beschränkt.
20
Lemma 1.36. Sei X ein metrischer Raum und A ⊂ X kompakt. ⇒ A ist
beschränkt.
Beweis. Sei x ∈ X und sei die offene Überdeckung {Bn (x)}n∈N von A, wobei
Bn (x) ein offener Ball mit Zentrum x und Radius n ist. Da A kompakt ist,
ist A von endlichen vielen von diesen Bällen überdeckt. Deshalb enthält der
grösste Ball die Menge A, d.h., A ist beschränkt.
Satz 1.37. Sei X ein metrischer Raum. Eine Teilmenge A ⊂ X ist kompakt
⇒ A ist beschränkt und abgeschlossen in X.
Korollar 1.38 (Heine - Borel). Eine Teilmenge A ⊂ Rn ist kompakt ⇔ A
ist beschränkt und abgeschlossen in Rn
Beweis. Es folgt aus Lemma 1.34 und 1.36.
Proposition 1.39. (Closed Map Lemma) Sei X ein kompakter topologischer
Raum, Y ein Hausdorff-Raum und f : X → Y stetig.
(a) f (X) ist abgeschlossen
(b) f surjektiv ⇒ f ist Quotientenabbildung
(c) f bijektiv ⇒ f ist Homöomorphismus
Beweis. (a) Sei C ⊂ X abgeschlossen.
Zu Zeigen: f (C) ⊂ Y ist abgeschlossen.
Aus 1.34(b) ⇒ C ist kompakt.
√ Mit 1.27 ⇒ f (C) ist kompakt. 1.34(a)
⇒ f (C) ist abgeschlossen.
(b) f stetig ⇒ f −1 (U ) offen ∀U ⊂ Y offen.
Zu Zeigen: ∀U ⊂ Y : f −1 (U ) offen ⇒ U ⊂ Y ist offen.
X\f −1 (U ) ist abgeschlossen in X (nach Voraussetzung) ⇒(a) f (X \ f −1 (U ))
−1
ist abgeschlossen.
√ Da f surjektiv folgt f (X \ f (U )) = Y \ U ⇒ U ist
offen in Y .
(c) Übung
Weitere Eigenschaften
• Das Produkt zweier kompakten Räume ist kompakt.
21
• Der Quotient eines kompakten Raumes ist kompakt.
Beispiele.
• Jedes abgeschlossene Intervall in R ist kompakt.
• Das Produkt [a, b] × [a, b] zweier kompakten Teilmengen ist kompakt.
Lemma 1.40. Sei A ⊂ Rn kompakt und f : A → R, dann nimmt f ein
Maximum/Minimum in A an.
Das heisst: ∃xmax , xmin : f (xmin ) ≤ f (x) ≤ f (xmax ) ∀x ∈ A
1.5
Mannigfaltigkeiten
Ein topologischer Raum X ist lokal Euklidisch von Dimension n, falls jeder
Punkt von X eine Umgebung U besitzt, die zu einer offenen Teilmenge von
Rn homöomorph ist. Äquivalent: U ist homöomorph zu einem offenen Ball
in Rn oder zu Rn selbst.
Eine offene Teilmenge U ⊂ X zusammen mit einem Homöomorphismus
φ : U → Rn heisst ein Koordinaten-Patch (U, φ).
Definition 1.41. Eine n-dimensionale topologische Mannigfaltigkeit ist ein
zweitabzählbarer, Hausdorffscher, lokal Euklidischer Raum von Dimension n.
Wir werden es mit n-Mannigfaltigkeit abkürzen.
Satz 1.42. Jede offene Teilmenge einer n-Mannigfaltigkeit ist eine n-Mannigfaltigkeit.
Satz 1.43 (Invarianz des Gebietes). Sei U ⊂ Rn homöomorph zu Rn . Dann
ist U offen in Rn .
Beweis. In [HW69]
Korollar 1.44 (Invarianz der Dimension). Aus m 6= n folgt, dass Rm nicht
homöomorph zu Rn ist. Somit kann kein topologischer Raum eine m-dimensionale
und eine n-dimensionale Mannigfaltigkeit sein, wenn m 6= n.
Beweis. Für m < n gilt:
Rm ⊂ Rn nicht offen, aber Rn ist offen in Rn
⇒ Rm nicht homöomorph zu Rn
Sei Hn := {(x1 , . . . , xn ) ∈ Rn |xn ≥ 0} der geschlossene Euklidische Halbraum mit der Teilmengetopologie von Rn .
22
Definition 1.45. Eine n-dimensionale topologische Mannigfaltigkeit mit Rand
M ist ein zweitabzählbarer Hausdorffscher topologischer Raum M , in dem jeder Punkt eine Umgebung besitzt, die entweder
• zu einer offenen Teilmenge von Rn
• oder zu einer offenen Teilmenge von Hn
homöomorph ist. Punkte der ersten Sorte heissen innere Punkte von M , ihre Vereinigung bildet das Innere Int M . Punkte der zweiten Sorte heissen
Randpunkte, ihre Vereinigung bildet der Rand ∂M .
Achtung: Eine n-Mannigfaltigkeit mit Rand ist keine n-Mannigfaltigkeit!
Satz 1.46. (Invarianz des Randes) Sei M eine Mannigfaltigkeit mit Rand.
Kein Punkt von M kann gleichzeitig in Int M und ∂M liegen, somit
M = Int M q ∂M.
Hier q ist die disjunkte Vereinigung, d.h. Int M ∩ ∂M = ∅.
Int M ist eine n-Mannigfaltigkeit ohne Rand.
Eine 2-Mannigfaltigkeit (mit Rand) heisst eine Fläche (mit Rand).
Beispiele. D2 ist eine Fläche mit Rand S 1 .
D2 : = {x ∈ R2 | ||x|| ≤ 1} =: O1 (0, R2 )
S 1 : = ∂D2 = {x ∈ R2 | ||x|| = 1}
Int D2 = {x ∈ R2 | ||x|| < 1} = O1 (0, R2 )
• Eine 2-Sphäre = S 2 = {x ∈ R3 | ||x|| = 1} ist eine Fläche.
• Eine Donutoberfläche T 2 = S 1 × S 1 (Torus) ist eine Fläche.
• Ein gequetschter Donut ist keine Fläche.
• Ein Zylinder = S 1 × [a, b] ist keine Fläche, aber eine Fläche mit Rand.
• Ein offener Zylinder = S 1 × (a, b) ist eine Fläche.
• 1.6 ist keine Fläche, da alle roten Punkte keine Umgebung homöomorph
zu R2 haben.
23
Abbildung 1.6: Keine topologische Fläche
1.5.1
Konstruktion von neuen Mannigfaltigkeiten aus
den alten
Sei X ein top. Raum und ∼ eine Äquivalenzrelation auf X, dann nennt man
X/ ∼ Quotientenraum (mit Quotiententopologie versehen).
Anwendung Seien X, Y top. Räume, A ⊂ Y abgeschlossen, f : A → X
stetig, und a ∼ f (a) die Äquivalenzrelation.
X ∪f Y := (X q Y )/ ∼
ist das Ergebnis von Verkleben von X und Y entlang f .
Beispiel. S 2 = D2 ∪f D2 , wobei f : ∂D2 → ∂D2 .
Satz 1.47. Seien M, N n-Mannigfaltigkeiten mit Rand, und h : ∂N → ∂M
ein Homöomorphismus. Dann ist M ∪h N eine n-Mannigfaltigkeit (ohne
Rand).
Beweis. Wir müssen zeigen: M ∪h N ist lokal Euklidisch. Sei q : M q N →
M ∪h N die Quotientenabbildung. Eingeschränkt auf Int M q Int N , q ist
injektiv und somit ein Homöomorphismus auf den Bild (M ∪h N ) \ S, und
ist das Bild ist auch lokal Euklidisch. Hier S := q(∂M ∪ ∂N ).
Es bleibt die Punkte in S zu betrachten. Sei s ∈ S und seien y ∈ ∂N ,
x = h(y) ∈ ∂M zwei Punkte in q −1 (s). Wir wählen eine Karte (U, φ) für M
und eine Karte (V, ψ) für N , so dass x ∈ U und y ∈ V . Sei Û = φ(U ) ⊂ Hn
und V̂ = φ(V ) ⊂ Hn . Wir identifizieren Hn mit Rn−1 × [0, ∞) und Rn mit
Rn−1 ×R. Wir nehmen an, dass h(V ∩∂N ) = U ∩∂M und dass Û = U0 ×[0, ),
V̂ = V0 × [0, ) für eine > 0 und für zwei offene Mengen U0 und V0 .
24
Dann können die zwei Karten als φ(x) = (φ0 (x), φ1 (x)) und als ψ(x) =
(ψ0 (x), ψ1 (x)) geschrieben werden, wobei die Abbildungen φ0 : U → U0 ,
φ1 : U → [0, ), ψ0 : V → V0 , ψ1 : V → [0, ) stetig sind. Da die Punkte x
und y auf dem Rang liegen, gilt es φ1 (x) = ψ1 (y) = 0.
Das Ziel ist die zwei Karten in einer gemeinsamen stetigen Abbildung
kombinieren, so dass die entsprechende Punkte auf dem Rand der zwei Mannigfaltigkeiten den gleichen Wert haben. Das Problem liegt daran, dass die
Karten φ und ψ nicht immer auf dem Rand übereinstimmen. Darum passen
wir mittels eines Homöomorphismus die Karte ψ an. Die Einschränkungen
φ0 |U ∩∂M : U ∩ ∂M → U0
ψ0 |V ∩∂N : V ∩ ∂N → V0
sind Homöomorphismen, so können wir den folgenden Homöomorphismus
definieren:
β := φ0 |U ∩∂M ◦ h ◦ (ψ0 |V ∩∂N )−1 : V0 → U0 .
Definiere die folgende Abbildung:
B : V̂ → Rn
(x1 , . . . , xn ) 7→ (β(x1 , . . . , xn−1 ), −xn ) .
Die Abbildung B stellt durch den Homöomorphismus β die Randpunkte um
und sie dreht jede senkrechte Linie, die über einem Randpunkt steht, nach
unten um. Dann gilt
B ◦ ψ(y) = (β ◦ ψ0 (y), 0) = (φ0 ◦ h(y), 0) = φ ◦ h(y) ∀y ∈ V ∩ ∂N. (1.1)
Es bleibt die gemeinsame Abbildung, die die zwei Karten zusammen klebt,
e : U q V → Rn wie folgt
zu definieren. Sei die Abbildung Φ
(
φ(y),
y ∈ U,
e
Φ(y)
=
B ◦ ψ(y), y ∈ V.
Die Einschränkung von q auf U q V ist eine Quotientenabbildung nach
e den Quotient.
die Umgebung q(U q V ) von s. Wegen (1.1) respektiert Φ
Deswegen lässt sie sich auf eine injektive stetige Abbildung Φ : q(U qV ) → Rn
erweitern. Da die Abbildungen φ, ψ und B Homöomorphismen sind, kann
man die Umkehrfunktion von Φ auch explizit hinschreiben:
(
q ◦ φ−1 (y),
yn ≥ 0
Φ−1 (y) =
q ◦ ψ −1 (y) ◦ B −1 (y), y n ≤ 0.
25
Für y n = 0 stimmen die zwei Definitionen zu, deshalb ist Φ stetig. Das
heisst, dass Φ ein Homöomorphismus ist und dass M ∪h N lokal Euklidisch
ist.
Beispiel. Seien M, N n-Mnf. Dann heisst die neue n-Mnf
M #N := (M \ Int Dn ) ∪h (N \ Int Dn )
die zusammenhängende Summe von M und N , wobei h : S n−1 → S n−1 ein
Homöomorphismus ist.
1.6
Topologische Gruppen
Eine topologische Gruppe ist eine Gruppe G versehen mit einer Topologie,
in der
• die Multiplikation m : G × G → G mit m(g, h) = gh und
• die Inverse i : G → G mit i(g) = g −1
stetige Abbildungen sind.
Beispiele.
• (R, +), (R \ {0}, ·), (C \ {0}, ·) mit Euklidischen Topologie.
2
• GL(n, R) (eng. "general linear"group), mit Teilmengetopologie von Rn
• eine beliebige Gruppe mit der diskreten Topologie
• S 1 ⊂ C \ {0} und O(n) ⊂ GL(N, R) mit der Teilmengetopologie.
1.6.1
Wirkung von G auf X
Eine Wirkung einer Gruppe G auf einen topologischen Raum X ist eine
stetige Abbildung G × X → X, die ein Paar (g, x) auf ein Element gx ∈ X
abbildet, dabei gelten:
g1 (g2 x) = (g1 g2 )x und 1x = x
für alle g1 , g2 ∈ G und x ∈ X.
Beispiel.
• GL(n, R) wirkt auf Rn durch Matrixmultiplikation.
26
Sei x ∼ y falls y = gx für g ∈ G, dann heisst X/ ∼=: X/G einen
Bahnenraum der Wirkung.
Beispiel. Pn ist der Bahnenraum der Wirkung von R \ {0} auf Rn+1 \ {0}
durch Skalarmultiplikation.
27
Kapitel 2
Zell- und Simplizialkomplexe
2.1
Zellzerlegungen und CW-Komplexe
Definition 2.1. Ein topologischer Raum, der homöomorph ist zu
• O1 (0) ⊂ Rn heisst offene n-Zelle (eng. “open n-cell”)
• O1 (0) ⊂ Rn heisst eine geschlossene n-Zelle.
Der Rand einer geschlossenen n-Zelle ist homöomorph zu S n−1 .
Definition 2.2. Sei v, w ∈ Rn
vw := {x ∈ Rn |x = tv + (1 − t)w 0 ≤ t ≤ 1}
Eine Menge X ⊂ Rn ist konvex, falls ∀v, w ∈ X ⇒ vw ⊂ X.
Beispiel. Jede Gerade in Rn ist konvex.
Bemerkung. Jede konvexe Teilmenge von Rn ist wegzusammenhängend.
Stetige Abbildungen respektieren Konvexität nicht, dafür tun es die affinen
Abbildungen.
Satz 2.3. Sei D ⊂ Rn kompakt und konvex mit Int D 6= ∅. Dann ist D eine
geschlossene n-Zelle und Int D ist eine offene n-Zelle. Für jeden p ∈ Int D,
gibt es einen Homöomorphismus F : O1 (0) → D mit F (0) = p, F (O1 (0)) =
Int D und F (S n−1 ) = ∂D.
Der Beweis ist auf S.128-129 in [Lee11] zu finden.
28
Beispiele.
• Jedes geschlossene (offene) Intervall ist eine geschlossene
(offene) 1-Zelle.
• Jede Region in R2 , begrenzt durch einen regulären Polygon, ist eine
2-Zelle.
• Würfel und Tetraeder sind 3-Zellen.
2.1.1
CW-Komplexe
Sei Dn ⊂ Rn eine geschlossene n-Zelle, X ein topologischer Raum.
Eine Zellzerlegung von X ist eine Partition E von X in offene Zellen
verschiedener Dimension, so dass
• für jede Zelle e ∈ E von Dimension n ≥ 1, eine stetige Abbildung
Φ : Dn → X existiert, so dass
• Φ|Int Dn : Int Dn → e ein Homöomorphismus ist, und Im Φ|∂Dn eine
Vereinigung von Zellen strikt kleiner Dimension ist.
Φ heisst die charakteristische Abbildung. Eine Zelle e ⊂ X ist regulär falls die
charakteristische Abbildung ein Homöomorphismus auf e ist. Eine Zerlegung
ist regulär, wenn alle ihre Zellen regulär sind.
Ein Zellkomplex ist ein Hausdorffscher Raum mit einer Zellzerlegung.
Die Topologie auf X ist kompatibel mit E falls U ⊂ X offen ⇐⇒ U ∩ e
offen in e, ∀e ∈ E.
Ein CW-Komplex ist ein Zellkomplex (X, E), in dem
• der Abschluss jeder Zelle in der Vereinigung von endlich vielen Zellen
enthalten ist und
• die Topologie auf X mit E kompatibel ist.
Jeder lokal endliche Zellkomplex (d.h. jeder Punkt hat eine Umgebung,
die nur endlich viele Zellen schneidet) ist ein CW-Komplex.
Jeder CW-Komplex mit abzählbar vielen Zellen, der lokal Euklidisch ist,
ist eine Mannigfaltigkeit.
Dimension eines CW-Komplexes ist die maximale Dimension seiner Zellen.
29
Beispiele. S 2 hat eine Zellzerlegung mit 1 0-Zelle, 1 1-Zelle und 2 2-Zellen,
oder eine andere Zellzerlegung mit 1 0-Zelle und 1 2-Zelle.
T 2 hat eine Zellzerlegung mit 1 0-Zelle, 2 1-Zellen und 1 2-Zelle. Alle diese
Zerlegungen sind nicht regulär.
2.1.2
Klassifikation der 1-Mannigfaltigkeiten
Fakt: Jede 1-Mannigfaltigkeit ist ein regulär CW-Komplex.
Beweis ist auf S. 148 in [Lee11].
Dabei besteht der Rand jeder 1-Zelle aus genau 2 0-Zelen und jede 0-Zelle
ist der Rand von genau zwei 1-Zellen.
Satz 2.4. Jede nicht leere zusammenhängende 1-Mannigfaltigkeit ist homöomorph zu S 1 , wenn sie kompakt ist, und sonst zu R.
Korollar 2.5. Jede zusammenhängende 1-Mannigfaltigkeit mit nicht leerem
Rand ist homöomorph zu [0, 1], wenn sie kompakt ist, und zu [0, ∞) sonst.
2.2
Simplexe
Definition 2.6. Sei X ⊂ Rn .
Die konvexe Hülle von X:
\
conv X := {C ⊂ Rn |X ⊂ C, C konvex }
Übung: Zeige, dass conv X konvex ist.
Definition 2.7. Seien a0 , a1 , a2 , ..., ak ∈ Rn affin unabhängig (k ≥ 0).
(D.h. die Vektoren a1 − a0 , a2 − a0 , ..., ak − a0 sind linear unabhängig.)
ha0 , ..., ak i := conv{a0 , ..., ak } ist ein k-Simplex.
Lemma 2.8. Seien a0 , ..., ak ∈ Rn affin unabhängige Punkte.
(
)
k
k
X
X
ha0 , ..., ak i = x ∈ Rn |x =
ti ai : ti ∈ R mit
ti = 1 und ti ≥ 0∀i
i=0
i=0
Die Koeffizienten ti sind eindeutig. (“baryzentrische Koordinaten”). Die Menge ha0 , ..., ak i heisst ein k-Simplex von Dimension k.
30
(∗)
Korollar 2.9. Jeder k-Simplex ist eine k-Zelle.
Beweis. (∗)
Induktion auf k:
Für k = 0 ist t0 = 1 und wir sind fertig.
Induktionsannahme: für k − 1 gelte (∗).
Nennen wir die rechte Seite von (∗) D.
Wir müssen folgendes überprüfen:
1. ai ∈ D
2. Sei S eine konvexe Menge, die ai (∀i) enthält. ⇒ D ⊂ S
3. D konvex
√
1. ai = 0a0 + 0a1 + ... + 1ai + ... + 0ak ∈ D
P
2. Sei x = ki=0 ti ai ∈ D. Z.z. x ∈ S:
Falls tk = 1 ⇒ x = ak ⇒ x ∈ S
Falls tk 6= 1:
!
k−1
X
ti
ai + tk ak
x = (1 − tk )
1
−
t
k
i=0
Pk−1 ti
ti
≥ 0,
i=0 1−tk = 1.
1−tk
Pk−1 ti
Ich setze y := i=0
a ∈ Rn .
1−tk i
Nach Induktionsannahme gilt y ∈ ha0 , ..., ak−1 i ⇒ y ∈ S
Da S konvex ist und ak ∈ S, folgt dass yak ⊂ S ⇒ x ∈ S
P
P
3. Seien v = ki=0 ti ai und w = ki=0 si ai in D.
zu Zeigen: z = rv + (1 − r)w für r ∈ [0, 1] ⇒ z ∈ D
z=r
=
k
X
ti ai + (1 − r)
i=0
k
X
k
X
i=0
(rti + si − rsi )ai
i=0
⇒z∈D
31
s i ai
√
Lemma 2.10. Seien {a0 , ..., ak } und {b1 , ..., bp } affin unabhängig.
ha0 , ..., ak i = hb0 , ..., bp i ⇔ {a0 , ..., ak } = {b0 , ..., bp }, insbesondere gilt k = p.
Definition 2.11. Seien σ, τ ⊂ Rn Simplexe.
τ heisst Seite von σ (τ ≤ σ), wenn die Ecken von τ auch Ecken von σ sind.
Wenn τ ≤ σ und τ 6= σ, dann ist τ eigentliche Seite (proper face) von σ
(τ < σ).
Beispiel. Ein Dreieck hat 6 eigentliche Seiten:
Definition 2.12. Der Rand von σ:
∂σ :=
[
τ
τ <σ
Lemma 2.13. Sei σ = ha0 , ..., ak i ein k-Simplex in Rn .
1.
(
∂σ =
n
x ∈ R |x =
(
Int σ =
x ∈ Rn |x =
k
X
i=0
k
X
i=0
t i ai :
ti ai :
k
X
i=0
k
X
)
ti = 1 und ti ≥ 0∀i und ti = 0 für einige i
)
ti = 1 und ti > 0∀i
i=0
2. Seien Dk = {x ∈ Rk | ||x|| ≤ 1} und S k−1 = ∂Dk = {x ∈ Rk | ||x|| = 1}.
Dann ∃h : Dk → σ Homöomorphismus mit h(S k−1 ) = ∂σ.
3. ∂σ und σ sind kompakt und wegzusammenhängend.
32
Beweis.
1. Sei x ∈ ∂σ ⇒ x ∈ ’eigentliche Seite’ von σ.
x ∈ η mit dim η < dim σ
x ∈ ha0 ,P
..., aj−1 , aj+1 , ..., ak i
⇒ x = i6=j si ai
S
3. ∂σ = τ <σ τ .
Jedes τ ist konvex, also auch wegzusammenhängend.
Sowohl ∂σ als auch σ sind beschränkt und abgeschlossen, also kompakt.
(1.38)
2. Ich verschiebe σ ⊂ Rn mit einer affinen Abbildung, s.d. 0 ∈ Int σ.
Wir suchen:
h : Dk → σ
g : σ → Dk
x
.
Sei g : ∂σ → S k−1 , mit g(x) = ||x||
g ist bijektiv und stetig. Da σ kompakt ist, ist g|∂σ ein Homöomorphismus ⇒ g −1 |∂σ ist stetig.
Definiere h|S k−1 := g −1 .
Wir setzen h, g auf Dk (resp. σ) linear fort.
Bleibt zu verifizieren, dass h, g stetig sind. (Übung)
2.3
Simplizialkomplexe
Definition 2.14. Ein Simplizialkomplex K (in Rn ) ist eine Menge von Simplexen in Rn mit folgenden Eigenschaften:
1. σ ∈ K und τ < σ ⇒ τ ∈ K
2. σ, τ ∈ K und σ ∩ τ 6= ∅ ⇒ σ ∩ τ eine gemeinsame Seite von σ und τ
ist.
3. K ist lokal endlich, d.h. jeder Punkt in K hat eine Umgebung, die nur
endlich viele Simplexe schneidet.
Die 0-Simplexe nennen wir Ecken, die 1-Simplexe Kanten.
dim K = max{dim σ|σ ∈ K}
33
K 0 ⊂ K ist ein Unterkomplex von K, wenn mit σ ∈ K 0 alle Seiten von σ
auch in K 0 sind. Der Unterkomplex K (i) := {σ ∈ K| dim σ ≤ i} ist das i-te
Skelett.
Gegeben sei ein Simplizialkomplex K. Die Vereinigung aller Simplexe in
K mit der Teilmengetopologie von Rn ist ein topologischer Raum |K|, der
ein Polyeder heisst.
Jeder Polyeder |K| ist ein regulär CW-Komplex mit der Zerlegung gegeben durch ∪σ∈K Int σ.
Beispiel. Jeder n-Simplex zusammen mit allen seinen Seiten ist ein Simplizialkomplex, dessen Polyeder zu einem geschlossenen Ball in Rn homöomorph
ist.
Eigentliche Seiten von einem n-Simplex bilden ein n − 1-dimensionaler
Simplizialkomplex, dessen Polyeder zu S n−1 homöomorph ist. Zum Beispiel,
für n = 2, sei K = ha, b, ci ∪ ha, b, di ∪ ha, c, di ∪ hb, c, di ⇒ |K| ≈ S 2
Abbildung 2.1: K
∪
∪
∪
Gegeben sei ein topologischer Raum X. Ein Homöomorphismus zwischen
X und einem Polyeder heisst Triangulierung von X. Jeder topologische
Raum, der eine Triangulierung erlaubt, heisst triangulierbar.
Satz 2.15. Jede Fläche (oder 2-Mannigfaltigkeit) ist homöomorph zu einem
Polyeder |K|, wobei in K jede Kante (1-Simplex) die Seite von genau zwei
Dreiecken (2-Simplexen) ist.
Der Satz wurde in 1925 von Rado bewiesen und benutzt die folgende
grundlegende Sätze von Schönflies und Jordan. Wir nennen 1-Sphäre (bzw.
34
Kreisscheibe) jeden topologischen Raum, der zu S 1 (bzw. O1 (0) ⊂ R2 ) homöomorph ist.
Satz 2.16 (Satz von Schönflies). Sei C ⊂ R2 eine 1-Sphäre.
Dann existiert ein Homöomorphismus H : R2 → R2 mit H(S 1 ) = C
und es existiert eine Kreisscheibe B ⊂ R2 , s.d. H|R2 \B = Id.
{z
}
|
(∗)
(∗) H ist ausserhalb einer Kreisscheibe die Identität.
Beweis. In [Cai51]
Korollar 2.17 (Jordan Kurvensatz). Sei C ⊂ R2 eine 1-Sphäre.
(a) Die Menge R2 \ C hat 2 zusammenhängende Komponenten, eine davon
beschränkt, die andere unbeschränkt.
(b) Die Vereinigung von C mit der beschränkten Komponente ist eine Kreisscheibe B mit ∂B = C.
Korollar 2.18. Seien B1 , B2 ⊂ R2 Kreisscheiben.
Dann existiert ein Homöomorphismus H : R2 → R2 mit H(B1 ) = B2 , welcher ausserhalb einer Kreisscheibe die Identität ist.
Beweis. Aus 2.16 folgt, ∃H1,2 : R2 → R2 mit Hi (S 1 ) = ∂Bi .
Hi (D2 ) = Bi ⇒ H := H2 ◦ H1−1 ⇒ H(B1 ) = B2 .
Die Komposition von 2 Abbildungen, welche ausserhalb einer Kreisscheibe
die Identität sind, ist auch die Identität ausserhalb einer Kreisscheibe.
Bemerkung. In 1950 Moise hat bewiesen, dass jede 3-Mannigfaltigkeit triangulierbar ist. Es gibt Beispiele von 4-Mannigfaltigkeiten, die nicht triangulierbar sind.
2.3.1
Simpliziale Abbildungen
Definition 2.19. Seien K, L Simplizialkomplexe.
Eine Abbildung f : K (0) → L(0) ist simplizial, falls ∀σ = ha0 , ..., ak i in K
gilt:
f (σ) ∈ L ist der Simplex in L, der von den Ecken f (a0 ), ..., f (ak ) aufgespannt
ist.
35
Beispiel. Eine simpliziale Abbildung ist ein simplizialerIsomorphismus,
wenn sie bijektiv und f −1 auch simplizial ist.
Beispiel. Die Abbildung f : K (0) → L(0) unten ist simplizial und bijektiv,
aber f −1 ist nicht simplizial:
Definition 2.20. Seien K, L Simplizialkomplexe und f : K (0) → L(0) eine
simpliziale Abbildung.
Die induzierte Abbildung
|f | :P
|K| → |L| ist definiert als lineare Erweiterung
P
von f . (d.h. |f | |σ ( ti ai ) := ki=0 ti f (ai ))
Lemma 2.21. Seien K, L wie oben.
1. Wenn f : K (0) → L(0) eine simpliziale Abbildung ist, dann ist |f | stetig.
2. Wenn f ein simplizialer Isomorphismus ist, dann gilt |K| ≈ |L|.
3. Falls K und L isomorphe Unterteilungen haben, so gilt |K| ≈ |L|.
Beweis. (von Punkt 2. des Lemmas) Falls f : K (0) → L(0) ein simplizialer Isomorphismus ist, so ist nach 1. |f | stetig und wir müssen zeigen, dass
36
|f |−1 = |f −1 |. Dann folgt mit 1., dass f −1 stetig ist. Da |K| und |L| kompakt
sind (1.38), bleibt zu zeigen, dass |f | bijektiv ist.
Zur Injektivität von |f |, betrachte x, y ∈ |K| mit x 6= y.
⇒ ∃σ und τ in K mit x ∈ Int σ und y ∈ Int τ .
⇒ |f |(x) ∈ Int |f |(σ), |f |(y) ∈ Int |f |(τ ).
1.Fall: σ = τ
|f ||σ ist bijektiv ⇒ |f |(x) 6= |f |(y)
2. Fall: σ 6= τ
Int |f |(σ) ∩ Int |f |(τ ) = ∅ ⇒ |f |(x) 6= |f |(y)
Die Surjektivität von |f | kann man analog zeigen.
⇒ |f | ist bijektiv.
Eine stetige Bijektion zwischen kompakten Räumen ist ein Homöomorphismus.
Der Beweis von Punkt 1. ist Übungsaufgabe.
2.3.2
Unterteilungen:
Definition 2.22. Seien K, K 0 Simplizialkomplexe.
K 0 ist eine Unterteilung von K, falls |K| ∼
= |K 0 | und jeder Simplex von K 0
eine Teilmenge eines Simplexes von K ist.
P
Definition 2.23. Es gilt x ∈ σ ⇒ x = ki=0 ti ai
Der Baryzenter oder Schwerpunkt von σ ist
σ̂ :=
k
X
i=0
1
ai
k+1
Definition 2.24. K 0 heisst baryzentrische Unterteilung von K falls
1. Die Ecken von K 0 sind die Schwerpunkte der Simplexe von K
2. Die Ecken σ̂ 0 , ..., σ̂ q von K 0 spannen genau dann einen zu K 0 gehörenden q-Simplex auf, wenn für die zugehörigen Simplexe σ 0 , ..., σ q ∈ K
bei geeigneter Nummerierung σ 0 < σ 1 < ... < σ q in K gilt.
Definition 2.25. Seien K, L Simplizialkomplexe.
Eine simpliziale Abbildung f : K (0) → L(0) ist eine simpliziale Quotientenabbildung, falls
∀hb0 , ..., bp i ⊂ L ∃ha0 , ..., ap i ⊂ K : f (ai ) = bi ∀i
und wenn a, b ∈ K (0) und ha, bi ∈ K (1) =⇒ f (a) 6= f (b).
37
Dies ist keine simpliziale Quotientenabbildung, da ha, b, ci =
6 hb, c, di
Dies ist eine simpliziale Quotientenabbildung, da ha, b, di = hb, c, di
Lemma 2.26. Seien K, L Simplizialkomplexe und sei f : K (0) → L(0) eine
simpliziale Quotientenabbildung.
1. Die induzierte Abbildung |f | : |K| → |L| ist Quotientenabbildung.
2. Sei x ∈ |L|. ∃!η = ha0 , ..., ak i ∈ L mit x ∈ Int η und seien ti die
baryzentrischen
Koordinaten von x. ⇒ |f |−1 (x) = {y ∈ |K| : y =
Pk
i=0 ti bi mit hb0 , ..., bk i ist k-Simplex in K mit f (bi ) = ai }
Beweis.
1. Da |K|, |L| kompakt ⇒ jede stetige, surjektive Abbildung ist
Quotientenabbildung.
√
|f | ist stetig, |f | ist surjektiv.
2. Nach der Definition von |f |:
X
X
|f |(
ti bi ) =
ti ai
38
Satz 2.27 (Satz von Rado, erweitert). Jede kompakte, topologische Fläche
in Rn ist triangulierbar.
Wenn für Simplizialkomplexe K1 , K2 gilt, dass |K1 | ∼
= |K2 | und beide
Flächen sind, dann haben K1 und K2 simplizial-isomorphe Unterteilungen.
Zwei Simplizialkomplexe heissen kombinatorisch äquivalent, wenn sie eine gemeinsame Unterteilung haben. Die Behauptung, dass jede zwei homöomorphe Polyeder kombinatorisch äquivalent sind, ist als Hauptvermutung
bekannt. Sie ist für kompakte 2- und 3-Mannigfaltigkeiten bewiesen, und ist
falsch im allgemeinen. Mit den Gegenbeispielen zu der Hauptvermutung ist
auch die Hoffnung gestorben, topologische Probleme auf die kombinatorische
zu reduzieren.
2.4
Zusätzlicher Stoff
Definition 2.28. Sei K ein Simplizialkomplex in Rn .
S
Eine erlaubte Partition von K (0) ist ν = {Ai }i∈I , Ai ⊂ K (0) s.d i∈I Ai =
K (0) und keine zwei Ecken eines Simplexes gehören zu Ai (∀i).
Die induzierte Partition P(ν) = {Bi }i∈I auf |K| hat die folgende Eigenschaft:
x, y ∈ |K| liegen in einer Bi , falls
x ∈ Intha0 , ..., ak i
y ∈ Inthb0 , ..., bk i, wobei ∀i∃ki ∈ I, s.d. (ai , bi ) ∈ Aki
und es existiert ein affiner Isomorphismus F mit F (ai ) = bi und F (x) = y.
Lemma 2.29. Sei K ein Simplizialkomplex in Rn und ν eine erlaubte Partition von K (0) .
1. ∃ ein Simplizialkomplex K 0 in Rm und eine simpliziale Quotientenabbildung f : K (0) → K 0(0) mit {f −1 (v)|v ∈ K 0(0) } = ν
2. P(ν) = {|f |−1 (x)|x ∈ |K 0 |} ist die induzierte Partition von |K|.
3. Der Identifikationsraum von |K| und P(ν) ist |K 0 |.
Beweis. Angenommen ν = {A1 , ..., Am } und e1 , ..., em die Standardbasisvektoren von Rm .
δ = he1 , ..., em i (m − 1)-Simplex.
K 0 besteht aus den Seiten von δ, genauer gesagt, hei1 , ..., eip i ⊂ K 0 falls
∃hbi1 , ..., bip i in K mit bij ∈ Aij für verschiedene j.
Jede Seite von hei1 , ..., eip i ⊂ K 0 ⇒ K 0 ist Simplizialkomplex.
39
2.4.1
Simpliziale Flächen
Definition 2.30. Sei K ein Simplizialkomplex.
• star(σ, K) := {η ∈ K|η ist eine Seite von einem Simplex in K, der
auch σ als Seite hat}
• link(σ, K) := {η ∈ star(σ, K)|η ∩ σ = ∅}
Satz 2.31. Sei K ein Simplizialkomplex in Rn .
|K| ist eine Fläche, genau dann wenn
1. dim K = 2
2. jede Kante ist eine gemeinsame Seite von genau zwei 2-Simplexen
3. | link(v, K)| ∼
= S1
∀v ∈ K (0)
Beweis. “⇐” Gegeben ist K mit 1.,2. und 3.
zu Zeigen: |K| ist eine topologische Fläche, d.h. ∀x ∈ |K| hat eine Umgebung homöomorph zu R2 ⇒ x ∈ Int σ
• dim σ = 2: x ist innerer Punkt eines Dreiecks und hat damit eine offene
Umgebung homöomorph zu R2 .
• dim σ = 1: x liegt auf einer gemeinsamen Kante zweier Dreiecke und
hat damit eine offene Umgebung homöomorph zu R2 .
• dim σ = 0: In diesem Fall muss x die Ecke von mehreren Dreiecken
sein, welche alle aneinander liegen (2. und 3.) und hat damit eine offene
Umgebung homöomorph zu R2 .
“⇒” Sei K ein Simplizialkomplex mit |K| ∼
= Fläche.
zu Zeigen: K erfüllt 1.,2. und 3.:
1. Angenommen dim K = m ⇒ ∃η mit dim η = m
Sei x ∈ Int η. Nach Lemma 3.3 folgt: jede offene Umgebung von x ist
homöomorph zu Int Dm ∼
= Rm . Aus der Invarianz der Dimension wissen
m
wir, dass R nicht homöomorph zu R2 ist, wenn m 6= 2 ist.
2. Sei ν ein 1-Simplex in K und x ∈ Int ν und U ⊂ |K| eine offene
Umgebung von x. ⇒ U ∼
= R2 .
Angenommen, η ist keine gemeinsame Seite zweier 2-Simplexe:
40
• @σ ∈ K : η < σ.
Jede Umgebung von x ist (a, b) ∼
= R nicht homöomorph zu R2 .
• ∃!σ ∈ K : η < σ.
Jede Umgebung von x ist homöomorph zu R2+ (positive Halbebene). Diese ist nicht offen und nach der Invarianz des Gebietes nicht
homöomorph zu R2 .
• η ist gemeinsame Seite von p 2-Simplexen:
⇒ ∃σ1 , ..., σp ∈ K : η < σi ∀i.
S
Wähle eine Umgebung U von x, s.d. U ⊂ Int η ∪ 1≤i≤p σi
Wenn p = 2: Int η ∪ Int σ1 Int σ2 ∼
= R2
Wenn p > 2: Sei V eine offene Teilmenge von Intη ∪ Int σ1 ∪ Int σ2
mit x ∈ V . ⇒ V ∼
= R2 .
S
Aber V ist nicht offen in Int η ∪
S 1≤i≤p σi . (da V nicht als Schnitt
eines offenen Balls mit Int η ∪ 1≤i≤p σi dargestellt werden kann.)
Also ist jede offene Umgebung U von x nicht homöomorph zu V
und damit nicht homöomorph zu R2 .
3. Sei w ∈ K (0) .
zu Zeigen: | link(w, K)| ∼
= S 1.
Da dim K = 2, sind in link(w, K) nur 0- und 1-Simplexe enthalten.
Wir zeigen zuerst, dass | link(w, K)| keinen Rand hat.
Angenommen, | link(w, K)| ∼
= Bogen, dann gehört zu jedem 0-Simplex
in link(w, K) genau ein 1-Simplex in star(w, K) \ link(w, K). Aus 2.
folgt, dass dieser 1-Simplex gemeinsame Seite von zwei 2-Simplexen
sein muss. ⇒ | link(w, K)| = S 1 ∪ S 1 ∪ ... ∪ S 1 .
Es bleibt zu zeigen, dass | link(w, K)| wegzusammenhängend ist.
Angenommen, | link(w, K)| ist nicht wegzusammenhängend. (?)
⇒ | star(w, K)| \ {w} ist nicht wegzusammenhängend.
Andererseits ist jede Umgebung von w homöomorph zu R2 .
Int | star(w, K)| ist auch eine Umgebung von w, welche wegzusammenhängend ist. Dies gibt den Widerspruch zu (?)
Definition 2.32. Ein 2-Komplex K heisst simpliziale Fläche, falls 2. und
3. aus dem vorherigen Satz erfüllt sind, oder eleganter:
∀σ ∈ K mit dim σ = i (0 ≤ i ≤ 2) gilt:
| link(σ, K)| ∼
= S i−1 (S −1 = ∅)
Übung: Bedingung 2. ist redundant.
41
Kapitel 3
Klassifikation von Flächen
3.1
Konstruktion von Flächen durch Kleben
Klebt man die blauen Linien in Pfeilrichtung zusammen, entsteht ein
Zylinder.
Klebt man nun die Seiten des Zylinders aufeinander, entsteht ein Torus.
Klebt man die blauen Linien in unterschiedlicher Richtung, entsteht ein
Möbiusband.
Dazu auf YouTube: http://www.youtube.com/watch?v=4mdEsouIXGM
42
Klebt man die Seiten des Zylinders umgekehrt zusammen, entsteht eine
“Kleinsche Flasche”.
Klebt man 2 Halbkreise in entgegengesetzter Richtung, entsteht eine
projektive Ebene P 2 .
P 2 ist die Menge aller Geraden durch den Ursprung in R3 oder der
Identifikationsraum von D2 und einer Partition, wo die Teilmengen
Geraden durch den Ursprung sind.
Definition 3.1. Sei D ein Polygon (mit der Fläche) mit 2n Ecken.
Ein Verklebungsschema S ist eine Markierung aller Kanten von D mit Pfeilen und Buchstaben, wobei jeder Buchstabe doppelt vorkommt.
Ein Verklebungsschema S induziert eine Partition P (S) von ∂D wie folgt:
Wähle eine affine Abbildung h zwischen zwei gleich markierten Kanten:
h : Ka → Ka0 , die die Anfangs- und Endpunkte der Kante respektiert.
Die Punkte x und h(x) ∀x ∈ Ka und alle Markierungen a gehören dann zu
einer Teilmenge der Partition P (S).
P (S) induziert auch eine Partition der Ecken von D, die wir dann Vertexpartition nennen. Diese Vertexpartition besteht aus Eckenmengen.
Beispiel. eines Verklebungsschemas:
Die Vertexpartition dieses Beispieles ist {{u, v, w, y, z}, {x}}, die Eckenmengen davon sind {u, v, w, y, z} und {x}.
Definition 3.2. Sei D ein Polygon und S ein Verklebungsschema.
Wir sagen X ist das Ergebnis der Verklebung von D entlang S, falls X der
Identifikationsraum von D und P (S) ist, d.h.
∃q : D → X Quotientenabbildung mit {q −1 (x)|x ∈ X} = P (S)
43
Abbildung 3.1: Beispiel eines Verklebungsschemas
Satz 3.3 (Theorem 2.4.3 in [Blo97]). (a) Sei D ein Polygon und S sein
Verklebungsschema. Dann gilt:
Das Ergebnis der Verklebung von D entlang S ist eine Fläche Q ⊂ Rn
(b) Sei Q ⊂ Rn eine beliebige kompakte und zusammenhängende Fläche.
Dann gilt: ∃D und S, s.d. Q das Ergebnis der Verklebung von D entlang
S ist.
Um diesen Satz beweisen zu können, brauchen wir einige Vorbereitungen:
Lemma 3.4. Sei W eine Eckenmenge in einer Vertexpartition mit k ≥ 1
Ecken. Dann existiert eine Nummerierung von W = {w1 , w2 , ..., wk }, s.d für
alle i ∈ {1, ..., k} eine Seite, die wi enthält, mit einer Seite, die wi+1 enthält,
verklebt wird, (wobei k + 1 = 1).
Beweis (3.4). Induktion über k:
k = 1: In diesem
Fall werden beide Seiten, die w1 enthalten, mit einander
√
verklebt.
Induktionsannahme: Die Aussage gilt für alle Vertexpartitionen mit bis
zu k − 1 Ecken.
Sei nun W eine Vertexpartition eines Polygons D mit k Ecken und sei v ∈ W
eine Ecke. Wir schneiden nun aus D einen Keil, der v und die beiden Seiten,
die v enthalten (a, b), enthält, heraus und kleben den Keil wieder zu. So erhalten wir ein neues Polygon D0 mit zwei Seiten weniger als D.
Wir definieren ein Verklebungsschema S 0 für D0 wie folgt:
Wir nehmen S für alle Seiten, welche nicht mit a oder b verklebt werden. Die
44
→
Abbildung 3.2: D
→
Abbildung 3.3: D
ohne v
Abbildung 3.4: D0
beiden Seiten, welche mit a und b verklebt würden, verkleben wir miteinander.
Sei nun W 0 die Eckenmenge von D0 und S 0 , welche alle Ecken von W enthält,
ausser v. W 0 hat k − 1 Ecken, also gilt die Induktionsannahme. Wir können
nun die Nummerierung von W 0 so wählen, dass wk−1 in b enthalten ist und
w1 in a. (Dies funktioniert, da in D0 a und b verklebt werden.) Setzen wir
nun v = wk in diese Vertexpartition ein (also setzen den Keil wieder in D0 ),
haben wir wieder eine gewünschte Nummerierung von W
Nun können wir mit dem Beweis des Satzes beginnen.
Beweis (3.3). (a) Plan: Zuerst konstruieren wir Abbildungen von verschiedenen Teilen eines Polygons D zu gewissen Kreisscheiben in R2 .
Damit werden wir eine stetige Abbildung H : D → Rm konstruieren, wobei m von der Seitenanzahl von D und dem Verklebungsschema
S abhängt. Danach werden wir zeigen, dass für alle x, y ∈ D gilt:
H(x) = H(y) ⇔ x, y liegen in der selben Menge von P(S).
Sei D ein Polygon mit n Seiten, wobei n gerade ist. O.b.d.A. können
wir annehmen, dass n ≥ 4; sonst wäre n = 2 und man könnte beide
Seiten halbieren, womit man wieder im Fall n = 4 wäre.
Weiter nehmen wir an, dass D ein reguläres Polygon mit Zentrum
0 ∈ R2 und Innkreisradius 1 ist. Damit gilt, dass die Seitenlänge
= 2 tan πn ist. Wir definieren An = tan πn .
Sei E eine Kantenmenge von D und dem Verklebungsschema S. Seien
a und a0 die Kanten in E und p, p0 deren Mittelpunkte. Wir definieren
die Menge
UE := OAn (p, D) ∪ OAn (p0 , D).
45
UE ist die Vereinigung von zwei Halbkreisen mit Teilen ihrer Ränder.
Wir konstruieren eine Abbildung gE : UE → OAn (0, R2 ) indem wir
OAn (p, D) auf die obere Hälfte von OAn (0, R2 ) und OAn (p0 , D) auf
die untere Hälfte abbilden, so dass die Seiten der beiden Halbkreise
nach dem Verklebungsschema S verklebt werden. (Evt. muss man einen
Halbkreis spiegeln.) gE ist offensichtlich injektiv ausser auf den Kanten a und a0 und es gilt gE (x) = gE (y) für alle x, y ∈ UE , falls x und
y in der selben Teilmenge von P(S) liegen. Das Bild von gE ist die
ganze Kreisscheibe OAn (0, R2 ). Diese Abbildung gE existiert für jede
Kantennmenge E.
Nun sei W eine Eckenmenge der Vertexpartition von D und S; W enthält mindestens eine Ecke. Wir definieren die Mengen Uw analog zu
UE :
[
OAn (w, D).
UW :=
w∈W
UW ist eine Vereinigung von keilförmigen Stücken. Wir wollen eine Abbildung gW : UW → OAn (0, R2 ) mit gleichen Eigenschaften wie gE
konstruieren:
Nehme an, W enthalte k Ecken. Ist k = 1, so enthält W eine einzige
Ecke w. Diese bilden wir auf den Ursprung ab und spannen den Keil
darum, bis die beiden Seiten aufeinander liegen. Dies überdeckt genau
OAn (0, R2 ).
Abbildung 3.5: W mit nur einer Ecke
Sei nun k ≥ 2. Wir teilen die Kreisscheibe OAn (0, R2 ) in k gleichgrosse Keile (Kuchenstücke F1 , ..., Fk ). Wir können die Ecken in W mit
w1 , ..., wk nummerieren, so wie in 3.4. Die Abbildung gW ist so definiert,
dass sie alle wi auf den Ursprung abbildet und jeden Keil OAn (wi , D)
46
auf den Keil Fi . (So dass die Seiten der benachbarten Keile aufeinander
liegen.) Es gibt jeweils zwei Möglichkeiten, wie wir einen Keil abbilden.
(Man kann die Seiten vertauschen, oder nicht.) Fixiert man aber die
Abbildung eines Keils, so werden mit 3.4 alle andere Abbildungen entsprechend auch fixiert. Man sieht, dass gW injektiv ist, ausser auf den
Seiten der Keile und den Eckpunkten, und dass für alle x, y ∈ Uw
g(x) = g(y), falls x, y in der selben Teilmenge von P(S) liegen. Das
Bild von gW ist OAn (0, R2 ) und für jede Eckenmenge der Vertexpartition existiert eine Abbildung gW .
Um die Analogie zu wahren, definieren wir UD als die offene Kreisscheibe Int D2 , welche dem Polygon D eingeschrieben ist. gD : UD → Int D2
sei die Identität, welche sowohl stetig als auch injektiv ist.
Bezeichne mit E die Menge aller Kantenmengen von D unter S und V
die zugehörige Vertexpartition.
Es ist leicht zu sehen, dass die Familien von Mengen
{UE }E∈E ∪ {UW }W ∈V ∪ {UD }
eine offene Überdeckung von D ist. (Die Mengen sind relativ offen in
D)
Wähle 2 > 1 > 0 und definiere die folgenden Mengen:
UE0 = OAn −1 (p, D) ∪ OAn −1 (p0 , D)
UE00 = OAn −2 (p, D) ∪ OAn −2 (p0 , D)
∀E ∈ E;
0
UW
=
[
OAn −1 (w, D)
w∈W
00
UW
=
[
OAn −2 (w, D)
w∈W
∀W ∈ V;
UD0 = O1−1 (0, R2 )
UD00 = O1−2 (0, R2 )
Für 1,2 klein genug, sind die Familien von Mengen
0
{UE0 }E∈E ∪ {UW
}W ∈V ∪ {UD0 }
47
00
{UE00 }E∈E ∪ {UW
}W ∈V ∪ {UD00 }
00
0
offene Überdeckungen von D. Beachte, dass jeweils UE00 ( UE0 , UW
( UW
0
00
und UD ( UD . Damit haben wir den ersten Schritt dieses Teils des
Beweises geschafft.
Für den nächsten Schritt definieren wir einige Hilfsfunktionen:
Seien λ, µ : [0, ∞) → [0, ∞) Funktionen mit folgenden Graphen:
Abbildung 3.6: Hilfsfunktionen λ und µ
Definiere nun für jede E ∈ E eine reellwertige Funktion φE : D → R;
λ(||x − p||), für x ∈ OAn −1 (p, D);
φE (x) =
λ(||x − p0 ||), für x ∈ OAn −1 (p0 , D);
0,
für x ∈ D \ UE0 ,
wobei p, p0 wie oben sind. φE ist wohldefiniert und stetig. Wichtig ist,
dass φE (x) = φE (y) ist, wenn x und y durch S verklebt werden. Weiter
48
haben wir φE (x) > 0 ∀x ∈ UE0 . Wir definieren φW : D → R genau
analog zu φE und dazu φD : D → R durch φD (x) = µ(||x||), welche die
analogen Eigenschaften wie φE und φW besitzt.
Um Platz zu sparen, definieren wir ∆ := E ∪ V ∪ {D}.
Dadurch erhalten wir für alle δ ∈ ∆ die Mengen Uδ , Uδ0 und Uδ00 sowie
die Funktionen gδ und φδ wie oben definiert. Da die Mengen Uδ0 ganz D
überdecken, folgt, dass für jedes x ∈ D mindestens ein δ ∈ ∆ existiert,
s.d. φδ (x) > 0.
Als nächstes definieren wir für jedes δ ∈ ∆ eine Abbildung hδ : D → R2
durch
φδ (x) · gδ (x), für x ∈ Uδ ;
hδ (X) =
0,
für x ∈ D \ Uδ0 .
Auch diese Abbildung ist wohldefiniert und stetig.
Nun sind wir bereit für den letzten Schritt: Wir nehmen an, dass ∆ aus
d Elementen besteht (δ1 , ..., δd ). (d hängt von der Anzahl der Seiten von
D und dem Verklebungsschema ab.) Wir definieren
2
H : D → |R × {z
... × R} × R
... × R}2 = R3d
| × {z
d-mal
d-mal
durch
H(x) = (φδ1 (x), ..., φδd (x), hδ1 (x), ..., hδd (x)).
Die Abbildung H ist die zu Beginn des Beweises gesuchte. Da jede
Komponentenfunktion stetig ist, ist auch H stetig. Durch die Kompaktheit von D und 1.39 (b) folgt, dass H eine Quotientenabbildung
ist. Um den Beweis zu vervollständigen, müssen wir noch zeigen, dass
1. H(D) eine Fläche ist
2. H(x) = H(y) ⇔ x und y liegen in der selben Teilmenge von P(S)
2. Seien x, y ∈ D. Gilt x = y, so haben wir nichts zu zeigen, da x
und y zur selben Teilmenge von P(S) gehören.
Sei also x 6= y. Aus der Definition von H folgt, dass φδi (x) = φδi (y)
und hδi (x) = hδi (y) ∀1 ≤ i ≤ d. Wie früher bemerkt, gibt es mindestens ein δj mit φδj (x) > 0 und somit auch φδj (y) > 0. Durch
die Definition von φδj folgt, dass x, y ∈ Uδj . Da hδj (x) = hδj (y)
ist, folgt dass φδj (x) · gδj (x) = φδj (y) · gδj (y) und daraus, dass
gδj (x) = gδj (y).
49
Es gibt nun also 3 Fälle:
– δj ist eine Eckenmenge
– δj ist eine Kantennmenge
– δj = D
Ist δj = D, so ist gδj injektiv und damit x = y Ist δj eine Ecken- oder Kantennmenge, so ist gδj injektiv auf Uδj ∩D
und gδj (x) = gδj (y) genau dann, wenn x und y in der selben
Teilmenge von P(S) liegen.
1. Wir müssen zeigen, dass jeder Punkt H(x) ⊂ H(D) eine offene Umgebung homöomorph zu Int D2 besitzt. Da {Uδ00 }δ∈∆ eine
Überdeckung von D ist, existiert ein η ∈ ∆ s.d. x ∈ Uη00 . Um den
Beweis zu beenden, brauchen wir einen Homöomorphismus zwischen H(Uη00 ) und einer abgeschlossenen Kreisscheibe in R2 . Wir
definieren π : H(Uη00 ) → R2 wie folgt:
Für einen beliebigen Punkt y ∈ H(Uη00 ) sei π(y) = gη (z), wobei
z ein Punkt in Uη00 ist mit y = H(z). Wir müssen zeigen, dass π
injektiv ist. Seien π(y1 ) = π(y2 ). Dann ist gη (z1 ) = gη (z2 ). D.h.
z1 und z2 werden durch S miteinander verklebt und damit ist
H(z1 ) = H(z2 ) und damit y1 = y2 . Also ist π injektiv und π ist
stetig. Da Uη00 abgeschlossen und beschränkt ist, ist sie nach 1.38
auch kompakt. Da H stetig ist, ist auch H(Uη00 ) kompakt. Da π
stetig und injektiv ist, ist es ein Homöomorphismus auf sein Bild.
Das Bild von π ist gη (Uη00 ), was der Kreisscheibe OAn −2 (0, R2 ) entspricht. Damit haben wir gezeigt, dass H(D) eine Fläche ist und
sind fertig.
(b) Für diesen Beweis verwenden wir die Ergebnisse des nächsten Kapitels,
insbesondere den Satz von Moise (2.27):
∀Q∃K 2-Komplex mit Q ∼
= |K|, wobei K eine simpliziale Fläche ist.
|K| bekommt man durch Verkleben der 2-Simplexe entlang ihrer Seiten.
Wir führen den Beweis durch Induktion über die Anzahl der Polygone.
Im Fall n = 1 folgt die Behauptung.
Angenommen, wir haben n Polygone D1 , ..., Dn .
Falls ein Polygon Di existiert, bei dem die Kanten alle miteinander
50
verklebt werden, dann ist die Fläche nicht zusammenhängend. ⇒ es gibt mindestens eine Kante in Di , die mit einer Kante eines anderen Polygons Dj verklebt ist.
In diesem Fall verkleben wir Di mit Dj entlang dieser Kante und dadurch wird die Anzahl der Polygone um 1 verringert.
Mit der Induktionsannahme folgt somit die Behauptung.
3.2
Intrinsische Eigenschaften von Flächen
Lemma 3.5. Eine Fläche in Rn ist
zusammenhängend ⇔ wegzusammenhängend
Beweis. ⇐ bereits bewiesen.
⇒: Sei Q ⊂ Rn zusammenhängend.
Sei p ∈ Q und A = {q ∈ Q|∃ Weg von p nach q}
Strategie: wir zeigen, dass A offen und abgeschlossen ist.
Stimmt die Behauptung, dann folgt, dass A eine nicht leere Zusammenhangskomponente von Q ist und da Q zusammenhängend ist, folgt A = Q.
D.h. ∀q1 , q2 ∈ Q∃ Weg von qi nach p. Dann aber existiert ein Weg von q1 zu
q2 . ⇒ A ist wegzusammenhängend.
Beweis, dass A offen und abgeschlossen ist:
∀q ∈ Q ∃W ⊂ Q offen mit q ∈ W, W ∼
= Int D2 .
2
Da Int D wegzusammenhängend ist, folgt q ∈ A ⇒ W ∈ A ⇒ A ist offen.
Sei s ∈ Q \ A (∗).
Es existiert eine offene Umgebung U von s in Q \ A ⇒ es gibt einen Punkt
t ∈ U , der zu A gehört. ⇒ ∃ ein Weg von t zu p ⇒ ∃ Weg von s zu p, was
ein Widerspruch zu (∗) ist.
⇒ die ganze Umgebung liegt in Q \ A ⇒ Q \ A ist offen
⇒ A ist abgeschlossen.
Definition 3.6. Eine Fläche ist orientierbar, falls sie kein Möbiusband enthält, sonst ist sie nicht orientierbar.
51
3.3
Klassifikation von kompakten zusammenhängenden Flächen
Ziel: Eine vollständige Liste aller kompakten, zusammenhängender Flächen
zu geben, s.d. alle Flächen in der Liste verschieden sind.
Definition 3.7. Seien Q1 , Q2 ⊂ Rn zwei kompakte, zusammenhängende Flächen.
Für i ∈ {1, 2} sei Bi ⊂ Qi eine Kreisscheibe und h : ∂B1 → ∂B2 ein Homöomorphismus.
Die zusammenhängende Summe Q1 #Q2 :
Q1 #Q2 := (Q1 \ Int B1 ) ∪h (Q2 \ Int B2 )
Satz 3.8 (Proposition 2.6.1 in [Blo97]). Q1 #Q2 ist wohl-definiert.
D.h. Die Homöomorphismus-Klasse des Ergebnisses hängt nicht von der Wahl
der Bi und h ab.
Für den Beweis müssen wir uns zuerst noch etwas mit den Homöomorphismen von S 1 auf sich selbst befassen:
Definition 3.9. Seien x, y ∈ S 1 mit x 6= y.
→ und −
→
x und y unterteilen S 1 in zwei Teile, nämlich −
xy
yx.
−
→
xy ist die Verbindungsstrecke im Gegenuhrzeigersinn von x nach y (hier rot)
→ die entsprechende Verbindung von y nach x (hier blau).
und −
yx
Abbildung 3.7: Verbindungsstrecken auf S 1
52
Definition 3.10. Sei h : S 1 → S 1 ein Homöomorphismus.
Wir sagen, h ist orientierungserhaltend, falls es zwei unterschiedliche Punkte
−−−−→
→ =−
x, y ∈ S 1 gibt, mit h(−
xy)
h(x)h(y). Anderenfalls heisst h orientierungsum| {z } | {z }
rot
blau
kehrend.
Abbildung 3.8: orientierungserhaltend und orientierungsumkehrend
Lemma 3.11. Sei h : S 1 → S 1 ein Homöomorphismus und x, y ∈ S 1 , x 6= y
−−−−→
→ =−
sodass h(−
xy)
h(x)h(y).
−−−−−−→
−→
Dann gilt ∀x0 , y 0 ∈ S 1 mit x0 6= y 0 , dass h(x0 y 0 ) = h(x0 )h(y 0 ).
Beweis. Wir nehmen an, dass x, x0 , y, y 0 alle verschieden sind. Die übrigen
Fälle sind ähnlich.
→ oder in −
→ Wir betrachten den ersten Fall:
y 0 liegt entweder in −
xy
yx.
−
−
−
−
−
→
−−−−−−→
→
−→
→ = h(x)h(y), folgt dass h(−
Da h(−
xy)
xy 0 ) ⊂ h(x)h(y 0 ). Also muss h(xy 0 ) der
Bogen in S 1 sein, der im Gegenuhrzeigersinn von h(x) nach h(y 0 ) führt. Also
−−−−−−→
−→
→ verläuft analog. Fixieren
ist h(xy 0 ) = h(x)h(y 0 ). Der Beweis für y ∈ h(−
yx)
wir nun y 0 und verwenden das selbe Argument, wobei wir x durch x0 ersetzen,
−−−−−−→
−→
folgt, dass h(x0 y 0 ) = h(x0 )h(y 0 ).
Bemerkung. In Dimensionen grösser als 2 ist es schwierig, über eine Orientierung zu entscheiden, da man nicht wie in R2 von “im Uhrzeigersinn”
sprechen kann. Deshalb die folgende
Definition 3.12. Sei C ⊂ Rn eine 1-Sphäre und h : C → C ein Homöomorphismus.
h ist orientierungserhaltend ⇐⇒ für alle Homöomorphismen f : S 1 → C
gilt: f −1 ◦ h ◦ f ist orientierungserhaltend.
f
h
f −1
S1 → C → C → S1
53
Lemma 3.13. Sei Q ⊂ Rn eine zusammenhängende Fläche und B1 , B2 ⊂ Q
Kreisscheiben.
Dann existiert ein Homöomorphismus H : Q → Q, s.d. H(B1 ) = B2 .
Beweis. in [Blo97]
Lemma 3.14. Sei Q ⊂ Rn eine Fläche, B ⊂ Q eine Kreisscheibe und h :
∂B → ∂B ein orientierungserhaltender Homöomorphismus.
Dann existiert ein Homöomorphismus H : Q → Q, so dass
H(B) = B
H|∂B = h
Beweis. in [Blo97]
Definition 3.15. Sei Q ⊂ Rn eine Fläche.
Q heisst disk-umkehrbar, falls eine Kreisscheibe B ⊂ Q und ein Homöomorphismus h : Q → Q existieren, s.d. h(B) = B und h|∂B orientierungsumkehrend ist.
Beispiele. S 2 , T 2 sind disk-umkehrbar.
Alle nicht-orientierbaren Flächen sind disk-umkehrbar.
Proposition 3.16. Seien Q1 , Q2 ⊂ Rn Fläche.
1. Bi ⊂ Qi , i = 1, 2 eine Kreisscheibe und h : ∂B1 → ∂B2 ein Homöomorphismus. Dann existiert der Verklebungsraum (Q1 \ Int B1 ) ∪h (Q2 \
Int B2 ) und ist eine Fläche in irgendeinem Rm .
2. Man erhält mit obigem Verfahren nur 2 Flächen (bis auf Homöomorphismen).
3. Wenn mindestens eine Fläche (Q1 oder Q2 ) disk-umkehrbar ist, dann
erhält man genau eine Fläche (bis auf Homöomorphismen).
Damit können wir den Satz 3.8 beweisen:
Beweis (3.8). Aus 1. und 2. folgt, dass (Q1 \ Int B1 ) ∪h (Q2 \ Int B2 ) =
Q1 #Q2 eine Fläche ist und mit dem Hauptsatz (3.22), welcher am Ende dieses
Kapitels gegeben wird, folgt, dass jede Fläche disk-umkehrbar ist. Damit folgt
mit 3., dass Q1 #Q2 wohldefiniert ist.
54
Beweis. von Proposition 3.16 kann in [Blo97] nachgelesen werden.
Lemma 3.17. Seien A, B und C kompakt und zusammenhängend.
a) A#B ∼
= B#A
b) (A#B)#C ∼
= A#(B#C)
c) A#S 2 ∼
=A
Beweis. Übung
Proposition 3.18. Seien A, B kompakte, zusammenhängende Flächen, s.d.
A#B ∼
= S2
⇒A∼
= S 2 und B ∼
= S2
Beweis.
X
X
⇒X
X
⇒X
= A#B#A#B#A#B#...
= (A#B)#(A#B)#(A#B)#...
∼
= S 2 #S 2 #S 2 ... ∼
= S2
= A#(B#A)#(B#A)#(B#...
∼
= A#S 2 ∼
=A
55
Lemma 3.19. P 2 #P 2 ∼
= K2
Beweis. durch Konstruktion:
Abbildung 3.9: P 2 #P 2
Abbildung 3.10: Verklebt entlang C
Abbildung 3.11: D einfügen
Abbildung 3.12: Zerschneiden bei D
Abbildung 3.13: Das eine Dreieck spiegeln und drehen
Abbildung 3.14: Verkleben an A
56
Lemma 3.20. P 2 #T 2 ∼
= P 2 #P 2 #P 2
Beweis. durch Konstruktion:
Abbildung 3.15: P 2 #T 2
Abbildung 3.16: An C verkleben
Abbildung 3.17: Ergebnis
Abbildung 3.18: An E
zerschneiden
Abbildung 3.19: An A
verkleben
Abbildung 3.20: An F
zerschneiden
Abbildung 3.21: An D
verkleben
Abbildung 3.22: An G
zerschneiden
Abbildung 3.23: An B verkleben
Abbildung 3.24: Endergebnis
57
Proposition 3.21. Seien Q1 und Q2 kompakte, zusammenhängende Flächen.
Q1 #Q2 ist orientierbar ⇔ Q1 und Q2 sind orientierbar.
Beweis. ⇐:
Sei Q1 nicht orientierbar:
⇒ ∃M ⊂ Q1 . Da M keine Fläche ist ⇒ ∃p ∈ Q1 \ M und eine Umgebung
von p ∈ Q1 \ M .
Wähle B1 ⊂ Q1 \ M ⇒ Q1 #Q2 ist nicht orientierbar.
⇒:
Sei Q1 #Q2 nicht orientierbar.
⇒ ∃M ⊂ Q1 #Q2 = Q1 ∪C=∂B1 =∂B2 Q2
1. M ∩ C = ∅ ⇒ M liegt in Q1 oder Q2 ⇒ entweder Q1 oder Q2 ist nicht
orientierbar.
S
2. M ∩ C = 2n
i=1 Ii Angenommen, von Ik zu Ik+1 ändert der Pfeil seine
Orientierung, erhalten wir kein Möbiusband.
⇒ ∃i, s.d Ii zu Ii+1 die Orientierung nicht ändert.
Das Stück von M zwischen I1 und Ii+1 liegt vollständig in Q1 oder Q2 .
M 0 ∪ N ist ein Möbiusband, das in Q1 oder Q2 liegt ⇒ Q1 oder Q2 ist
nicht orientierbar.
Abbildung 3.25: Grafiken zum Beweis aus [Blo97]
58
Satz 3.22 (Hauptsatz: vollständige Klassifizierung von kompakten, zusammenhängenden Flächen). Jede kompakte, zusammenhängende Fläche ist homöomorph zu
S2
T 2 T 2 #T 2
T 2 #T 2 #T 2 ... T 2 # |{z}
... #T 2 ...
·n
P 2 P 2 #P 2 P 2 #P 2 #P 2 ... P 2 # |{z}
... #P 2 ...
·n
Strategie des Beweises:
1. Jede Fläche ist auf der Liste
2. Alle Flächen auf der Liste sind verschieden
Für den Beweis von 1. brauchen wir Satz 3.8
Jede kompakte Fläche bekommt man durch ein Verklebungsschema.
Aus jeder Verklebungsvorschrift bekommt man eine Fläche.
Für den Beweis von 2. brauchen wir topologische Invariante (Euler Charakteristik).
Daher werden wir den Satz in Kapitel 4 beweisen.
3.4
Euler Charakteristik
Definition 3.23. Sei C ein 2-Komplex, E die Anzahl der Ecken in C, K die
Anzahl der Kanten in C und F die Anzahl der 2-Simplexe in C. Die Euler
Charakteristik von C ist
χ(C) := E − K + F
Beispiel. Tetraeder-Hülle: χ(C) = 4 − 6 + 4 = 2
Bemerkung. Falls dim C = 1, gilt χ(C) := E − K
Satz 3.24. Sei Q eine kompakte topologische Fläche und seien K1 , K2 Triangulierungen dieser Fläche. Dann gilt χ(K1 ) = χ(K2 )
Daraus folgt χ(Q) := χ(K) wobei Q = |K|.
Beweis. Nach dem Satz von Rado haben K1 und K2 eine gemeinsame Unterteilung K. Angenommen, die Euler Charakteristik ändert sich nicht bei
Unterteilungen, so folgt, dass χ(K1 ) = χ(K) = χ(K2 ).
59
Beispiel. χ(T 2 ) = 1 − 3 + 2 = 0.
Lemma 3.25. Seien Q1 , Q2 kompakte Flächen in Rn .
χ(Q1 #Q2 ) = χ(Q1 ) + χ(Q2 ) − 2
Beweis. Nach dem Satz von Rado (Satz 3.8) gibt es K1 und K2 Triangulierungen von Q1 und Q2 . Seien σi 2-Simplexe in Ki .
Sei K ein 2-Komplex, der durch die Identifizierung von K1 \ σ1 mit K2 \ σ2
entlang der Partition ν.
⇒ |K| = Q1 #Q2
χ(K) = χ(Q1 #Q2 )
= E1 + E2 − 3 − (K1 + K2 − 3) + F1 + F2 − 2
= χ(Q1 ) + χ(Q2 ) − 2
60
Kapitel 4
Beweis des Hauptsatzes und
simplizialer Gauss-Bonnet Satz
4.1
Beweis des Hauptsatzes
Satz 2.20: Jede kompakte, zusammenhängende Fläche ist homöomorph zu:
S2
T 2 T 2 #T 2
T 2 #T 2 #T 2 ... T 2 # |{z}
... #T 2 ...
·n
P 2 P 2 #P 2 P 2 #P 2 #P 2 ... P 2 # |{z}
... #P 2 ...
·n
Um zu zeigen, dass die aufgelisteten Flächen nicht homöomorph sind, benutzen wir die Euler Charakteristik und Orientierbarkeit:
χ(S 2 ) = 2
χ(gT 2 ) = 2 − 2g
χ(g 0 P 2 ) = 2 − g 0
Es gibt also keine 2 orientierbare sowie auch keine 2 nicht orientierbare Flächen auf der Liste mit der gleichen Euler Charakteristik.
Wir zeigen nun, dass jede kompakte, zusammenhängende Fläche in der
Liste enthalten ist.
Es reicht zu zeigen, dass Q ∼
= S 2 oder Q ∼
= mT 2 #nP 2 .
Nach Satz 2.10 ist Q das Ergebnis der Verklebung eines Polygons D entlang
eines Verklebungsschemas S. Dies schreiben wir mit Hilfe eines Wortes im
Alphabet, indem wir im Gegenuhrzeigersinn durch D gehen.
61
Beispiel. Ein Wort für dieses Verklebungsschema: BCAA−1 BC
Wir beweisen den Satz durch Induktion über die Anzahl n der Kanten
von D.
Sei n = 2: ⇒ Q ∼
= S 2 oder P 2 .
Sei n ≥ 4 beliebig und die Aussage gelte für n − 2.
Es treten folgende 4 Fälle auf:
1. Es existiert ein Buchstabe, der im Wort zweimal mit der gleichen Potenz
vorkommt.
(a) Die beiden gleichen Buchstaben kommen gerade nacheinander im
Wort vor
(b) Die beiden gleichen Buchstaben liegen nicht nebeneinander
2. Jede Buchstabe kommt sowohl mit der Potenz 1 als auch mit der Potenz
−1 im Wort vor und es existieren zwei aneinander grenzende Kanten
mit der gleichen Markierung.
3. Jeder Buchstabe kommt mit der Potenz 1 als auch mit der Potenz −1
im Wort vor und es gibt keine Kanten mit der gleichen Markierung,
welche aneinander grenzen.
Es gibt aber zwei Kanten a, a−1 , s.d. alle anderen Kanten mit der selben
Markierung in einer der beiden Zusammenhangskomponenten von D \
{a, a−1 } liegen.
4. Alle anderen Varianten
62
1. (b) Sei a der Buchstabe, der zweimal mit der selben Potenz vorkomt.
Wir fügen zwei Kanten ein, jeweils vom Anfang der einen Kante
a zum Ende der anderen Kante a. Dadurch entstehen ein Möbiusband M und eine neue Fläche Q̂1 .
M = P 2 − D2 und Q̂1 ∪ D2 := Q1 hat n − 2 Kanten. Nach Induktionsannahme ist Q̂1 also entweder homöomorph zu S 2 \ D2 oder
nT 2 #mP 2 \ D2 .
Also Q1 = D2 ∪ Q̂1 ∼
= S 2 oder nT 2 #mP 2 ⇒ Q = P 2 #Q1 .
Abbildung 4.1: Q
Abbildung 4.2: M und Q̂1
63
(a) Hier erhalten wir wieder ein Möbiusband und eine Fläche mit n−2
Kanten:
Abbildung 4.3: Abspalten des Möniusbands
2. Hier gilt Q = Q1 ∪ D2 , wobei Q1 wieder n − 2 Kanten hat.
3. Hier zerteilen Wir Q in 2 Teile (Q1 und Q2 ) mit jeweils höchstens n − 2
Kanten:
4. n ≥ 4, also haben wir mindestens 2 verschiedene Buchstaben a, b im
Wort.
Da wir nicht im Fall 3 sind, ist unser Wort von der Form ...a...b...a−1 ...b....
64
Abbildung 4.4: Q Abbildung 4.5: Zerschneiden an e Abbildung 4.6: D2 , Q1
Abbildung 4.7: Q
Abbildung 4.8: Q1 und Q2
Also können wir einen punktierten Torus T 2 \ D2 herausschneiden. Es
gilt dann Q = Q1 ∪ (T 2 \ D2 ) und damit die Induktionsannahme:
Abbildung 4.9: Q
Abbildung 4.10: Q1 und T 2 \ D2
65
4.2
Flächen mit Rand
Definition 4.1. Eine Teilmenge Q ⊂ Rn ist eine topologische Fläche mit
Rand, falls für alle p ∈ Q eine offene Umgebung hat homöomorph zu:
Typ 1 Int D2
2
:= {(x, y) ∈ R2 |x2 + y 2 < 1, y ≥ 0}
Typ 2 D+
Definition 4.2. Ein 2-Komplex K heisst simpliziale Fläche mit Rand, falls
für alle v ∈ K (0) gilt:
1
S
Typ 1
| link(v, K)| ∼
=
[0, 1] Typ 2
4.3
Simpliziale Krümmung und simplizialer GaussBonnet Satz
Definition 4.3. Sei K eine simpliziale Fläche und v ∈ K (0) .
Für einen 2-Simplex σ ∈ K, der v enthält, sei L(v, σ) der Winkel von v in
σ.
Die simpliziale Krümmung (engl. “angle defect”) ist definiert durch:
X
L(v, σ)
d(v) := 2π −
σ∈K,dim σ=2
Bemerkung. d(v) = 0 falls v ein Schwerpunkt
von einem Simplex in K ist.
P
2
∼
Descartes hat bemerkt, dass |K| = S ⇒ σ∈K (0) d(v) = 4π
Satz 4.4 (Gauss-Bonnet). Sei K eine simpliziale Fläche.
X
d(v) = 2πχ(K)
v∈K (0)
Beweis. Da K eine simpliziale Fläche ist. ⇒ jede Kante gehört zu genau
zwei 2-Simplexen. Sei E die Anzahl der Ecken, K die Anzahl der Kanten und
F die Anzahl der Flächen. Es gilt 2K= 3F .
!
X
v∈K (0)
d(v) =
X
2π −
v∈K (0)
66
X
σ∈K
L(v, σ)
π
X zX }| {
= 2πE −
L(v, σ)
σ∈K σ∈K
= 2πE − πF
= 2πE − 3πF + 2πF
= 2πE − 2πK + 2πF
= 2πχ(K)
Korollar 4.5. Sei K eine simpliziale Fläche in Rn und L eine Unterteilung
von K.
Dann gilt χ(L) = χ(K)
Beweis. Für alle v ∈ L(0) tritt einer der folgenden Fälle auf:
1. Fall v ∈ K (0) ⇒ dL (v) = dK (v)
2. Fall v ∈
/ K (0) ⇒ v ∈ Int σ, σ ∈ K ⇒ d(v) = 0
P
P
⇒ v∈L(0) d(v) = v∈K (0) d(v) ⇒ χ(L) = χ(K)
4.4
Zusätzlicher Stoff: Brouwer Fixpunktsatz
Definition 4.6. Sei X ⊂ Rn und f : X → X.
x ist ein Fixpunkt von f , falls f (x) = x.
Definition 4.7. X hat Fixpunkteigenschaft, falls jede stetige Abbildung von
X nach X einen Fixpunkt hat.
Übung: Die Fixpunkteigenschaft bleibt unter Homöomorphismen erhalten.
Definition 4.8. Sei K eine simpliziale Kreisscheibe in Rn .
Eine Schälung von K ist eine geordnete Liste der 2-Simplexe σ1 , ..., σm , s.d.
die Menge {σ1 , ..., σk } zusammen mit allen Seiten eines Simplexes eine simpliziale Kreisscheibe ist für alle 1 ≤ k ≤ m.
67
Beispiel.
Abbildung 4.11: K
Abbildung 4.12: σ1 , σ2 , ..., σ6 ist eine Schälung
Abbildung 4.13: σ1 , σ3 , σ5 , ... ist keine Schälung
Satz 4.9 (Brouwer Fixpunktsatz). Jede stetige Abbildung f : D2 → D2 hat
einen Fixpunkt.
Satz 4.10. Es gibt keine stetige Abbildung r : D2 → S 1 , s.d r|∂D2 =S 1 = Id
Proposition 4.11. Die Sätze 5.3 und 5.4 sind entweder beide falsch oder
beide richtig.
Beweis. Wenn Satz 5.4 falsch ⇒ Satz 5.3 falsch:
Nehme an, es gibt eine stetige Abbildung r : D2 → S 1 s.d r|∂D2 =S 1 = Id.
Seien R : S 1 → S 1 Rotation um 180 Grad, j : S 1 ,→ D2 Inklusion.
√
j ◦ R ◦ r : D2 → D2 ist stetig und hat keinen Fixpunkt.
68
Wenn Satz 5.3 falsch ⇒ Satz 5.4 falsch:
Nehme an, f : D2 → D2 sei stetig ohne Fixpunkt.
Ich definiere r : D2 → S 1 wie folgt:
r(x) := S 1 ∩ (Strahl von f (x) zu x) (r ist wohl definiert, da f (x) 6= x ∀x)
Es gilt r(x) = x für alle x ∈ S 1 . Damit haben wir einen Widerspruch, da
laut Satz 5.4 dieses r nicht existieren dürfte.
Definition 4.12. Sei K ein Simplizialkomplex in Rn .
Eine Abbildung f : |K| → Rm ist simplexweise linear (SL) falls f |σ eine
affine Abbildung ist für alle σ ∈ K.
Bemerkung. SL ist keine simpliziale Abbildung, da in Rm keine simpliziale
Struktur vorhanden sein muss.
Definition 4.13. Sei ∆ = ha, b, ci gegeben, sei K eine simpliziale Kreisscheibe in Rn und f : |K| → ∆ eine SL Abbildung, s.d. ∀v ∈ K (0) f (v) ∈ {a, b, c}.
f |∂K ist gerade (bzw ungerade), falls jede Kante von ∆ Bild einer geraden
(bzw ungeraden) Anzahl von Kanten von K ist.
f ist gerade (bzw ungerade) falls ∆ das Bild einer geraden (bzw ungeraden)
Anzahl von 2-Simplexen in K ist.
69
Beispiele.
Abbildung 4.14: f und f |∂K sind ungerade
Abbildung 4.15: f und f |∂K sind gerade
Abbildung 4.16: f und f |∂K sind gerade
Lemma 4.14. Sei K eine schälbare Kreisscheibe in Rn und f : |K| → ∆
70
SL wie in der Definition 5.2.5. Wenn f |∂K gerade (bzw ungerade) ist, so ist
auch f gerade (bzw ungerade).
Beweis. Induktion über n :=die Anzahl
der 2-Simplexe in K
√
Falls n = 1 siehe Beispiele oben.
Angenommen wir haben n Simplexe und sei σ1 , ..., σn eine Schälung von K.
Sei σ1 , ..., σn−1 eine Schälung von K 0 . Für K 0 stimmt die Behauptung nach
Induktionsannahme. D.h. f |K 0 := f 0 und f 0 |∂K 0 haben die gleiche Parität.
K = K 0 ∪σn . Für f |σn hat man wieder genau die 3 Fälle wie in den Beispielen
oben.
Da wir nun zu f 0 respektive f 0 |∂K 0 jeweils die selbe Parität addieren, hat f
wieder die selbe Parität wie f |∂K
Beweis (Satz 5.2.2.). Sei D2 = ∆.
Angenommen, es existiert eine Abbildung r : ∆ → ∂∆, s.d. r|∂∆ = Id.
Da ∆ kompakt ist und r stetig, ∃δ :
∀x, y ∈ ∆ : ||x − y|| < δ ⇒ ||f (x) − f (y)|| < 81 .
Sei K eine schälbare Unterteilung von ∆, s.d. ||x − y|| < δ ∀x, y ∈ σ ∀σ ∈ K.
Sei L : |K| → ∆ eine SL Abbildung wie folgt:
Wähle a0 , b0 , c0 so dass sie nicht weiter als 81 von den Mittelpunkten entfernt
und keine Bilder der Ecken von K sind.
a falls r(v) ∈ [c0 , a] ∪ [a, b0 ]
(0)
b falls r(v) ∈ [c0 , b] ∪ [b, a0 ]
∀v ∈ K : L(v) :=
c falls r(v) ∈ [b0 , c] ∪ [c, a0 ]
L ist gerade, aber L|∂K ist ungerade
71
Literaturverzeichnis
[Blo97] Ethan D. Bloch. A first course in geometric topology and differential
geometry. Birkhäuser, 1997.
[Cai51] Stewart S. Cairns. An elementary proof of the Jordan-Schoenflies
theorem.
Proceedings of the American Mathematical Society,
2(6):pp. 860–867, 1951.
[HW69] W. Hurewicz and H. Wallman. Dimension theory. Princeton mathematical series. Princeton University Press, 1969.
[Lee11] John M. Lee. Introduction to topological manifolds, volume 202 of
Graduate Texts in Mathematics. Springer, New York, second edition,
2011.
72