Wellenfunktion und Schrödinger–Gleichung
Werbung

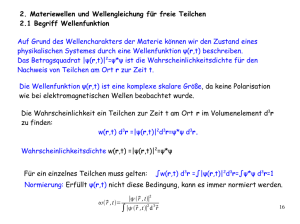
Kapitel 2 Wellenfunktion und Schrödinger–Gleichung Das Ziel ist es, die Begriffe Wellenfunktion, Schrödinger–Gleichung und Hamilton– Operator anhand von Beispielen einzuführen. 2.1 2.1.1 Wellenfunktion eines freien Teilchens Doppelspalt–Experiment Bisher hatten wir nur diskutiert, dass Licht, das klassisch durch (elektromagnetische) Wellen beschrieben wird, auch Teilchencharakter hat. Interessanterweise gilt auch umgekehrt, dass Elektronen, die man zunächst als Teilchen interpretiert, auch so etwas wie einen Wellencharakter“ haben. Ein Schlüsselexperiment, das das verdeutlicht, ” ist das Doppelspalt–Experiment (Abbildung 2.1). Hierbei werden Elektronenstrahlen durch eine Blende mit zwei Spalten geschickt. In dem Experiment werden die Elektronen auf einem Schirm hinter der Blende registriert. Man kann messen, wieviele Elektronen an einem gegebenen Ort aufschlagen. Wenn man hinreichend viele Elektronen registriert, kann man eine Verteilung der Orte ihres Auftreffens bestimmen. Wenn man das Elektron als klassisches Punktteilchen interpretiert, ähnelt die Situation einer Art Torwand–Schiessen. Man würde dann annehmen, dass das Elektron entweder den einen oder den anderen Spalt passieren kann. Das Muster der registrierten Elektronen wäre dann aus der Summe der einzelnen Prozesse ableitbar. Interessanterweise ist das nicht, was man beobachtet. Betrachten wir zunächst die Situation, in der nur eine Spalt offen ist. Es entsteht eine Situation, in der die Elektronen an Orten direkt hinter dem jeweiligen Spalt akkumulieren. Die interessante Situation ist die, in der beide Spalten offen sind. Hier entsteht ein Interferenzmuster (mit konstruktiver und destruktiver Interferenz), d.h. die Verteilung hat lokale Minima und Maxima. Dieses Interferenzmuster erhält man, indem man zwei Kugelwellen, die von den jeweiligen Spalten ausgehen, superponiert. 11 2.1. WELLENFUNKTION EINES FREIEN TEILCHENS Quelle a Q b (a) Nur Spalt a offen. Quelle a Q b (b) Nur Spalt b offen. Quelle a Q b (c) Beide Spalte offen. Abbildung 2.1: Doppelspalt–Experiment. Beugung (a) mit nur Spalt a, (b) mit nur Spalt a und (c) mit beiden Spalten geöffnet. 12 2.1. WELLENFUNKTION EINES FREIEN TEILCHENS Im Folgenden geht es darum, den Wellencharakter in die Beschreibung von Teilchen (d.h. z.B. Elektronen) einzubauen. 2.1.2 Bewegung eines freien Teilchens in einer Dimension (1D) Die kinetische Energie eines Teilchens, das sich in einer Dimension bewegt, ist E = p2 , 2m (2.1) wobei p = m · v = m · ẋ (2.2) der Impuls ist. Wellenfunktion. Nun wollen wir den Wellencharakter des Teilchens berücksichtigen. Eine Welle hat eine Amplitude, die wir als die Wellenfunktion Ψ(x, t) des Teilchens bezeichnen wollen. Die wesentliche Hypothese, die es uns ermöglichen wird, die Wellenfunktion zu interpretieren, ist: |Ψ(x, t)|2 bestimmt Aufenthaltswahrscheinlichkeit des Teilchens am Ort x und zur Zeit t. |Ψ(x, t)|2 a b Abbildung 2.2: Beispiel für eine Wellenfunktion. Das Integral von a bis b über das Betrags– Quadrats der Wellenfunktion liefert die Wahrscheinlichkeit dafür, das Teilchen zwischen a und b zu finden. Die Wahrscheinlichkeit dafür, zur Zeit t das Teilchen zwischen a und b in Abbildung 2.2 zu finden, ist W = �b a dx |Ψ(x, t)|2 . (2.3) 13 2.1. WELLENFUNKTION EINES FREIEN TEILCHENS Ebene Welle. Nun setzen wir für Ψ eine ebene Welle an, d.h. Ψ(x, t) = C ei (k x−ω t) . (2.4) Wir werden sehen, dass freie Teilchen durch solche ebene Wellen beschrieben werden können. Eine wesentliche Eigenschaft der Wellenfunktion ist die Normierung � dx |Ψ(x, t)|2 = 1 . (2.5) Für die Wellenfunktion eines freien Teilchens (2.4) hat man |Ψ(x, t)|2 = |C|2 . (2.6) Um solche Wellenfunktionen normieren zu können, muss man sie in einem Volumen V einsperren“; |C| hängt dann von dem betrachteten Volumen ab. ” In der Einleitung hatten wir gesehen, dass (zumindest für Photonen) die Energie des Teilchens proportional zur Frequenz (vgl. (1.6)) und der Impuls proportional zur Wellenzahl (vgl. (1.11)) sind. Wir fordern, dass sich diese Beziehungen auf das Elektron übertragen, also E = �ω und p = �k . (2.7) Damit kann die Wellenfunktion umgeschrieben werden, � � � � �� i i p2 Ψ(x, t) = C · exp (p x − E t) = C · exp t . px − � � 2m 2.1.3 (2.8) Bewegung eines freien Teilchens in drei Dimensionen (3D) Wir bezeichnen, wie üblich, x �rT = (x, y, z) �r = y , z (2.9a) und |�r| = � √ �r · �r = x2 + y 2 + z 2 . (2.9b) Die Wellenfunktion eines freien Teilchens verallgemeinert sich in 3 Dimensionen zu � Ψ(�r, t) = C ei (k·�r−ω t) . (2.10) 14 2.2. SCHRÖDINGER–GLEICHUNG DES FREIEN TEILCHENS Der Impuls ist px p� = py = � · �k pz (2.11) und die Energie ergibt sich zu E = �ω = 1 p� 2 �2 �k 2 = . 2m 2m (2.12) Durch Einsetzen in die Wellenfunktion erhält man die Form �� � � i p� 2 p� · �r − t . Ψ(�r, t) = C exp � 2m 2.2 (2.13) Schrödinger–Gleichung des freien Teilchens Wir suchen nun eine Differentialgleichung (DGL), zu der Ψ(�r, t) eine Lösung ist, und fordern die übliche (nicht–relativistische) Energie–Impuls–Beziehung eines freien Teilchens. Wir werden dann argumentieren, wie man die Differentialgleichung modifizieren muss, um Teilchen in einem Potential zu beschreiben. 2.2.1 Freies Teilchen in 1 Dimension Ausgangspunkt ist (2.8), � i Ψ(x, t) = C · exp (p x − E t) � � � � �� p2 i = C · exp px − t . � 2m Wir sehen, dass jedes Anwenden von ∂/∂t auf Ψ ein ω bzw. p� 2 /(2m) liefert und jedes ∂/∂x ein p. Um die nicht–relativistische Energie–Impuls–Beziehung E = p� 2 /(2m) zu reproduzieren, brauchen wir also eine DGL, in der ∂/∂x mit der doppelten Potenz wie ∂/∂t auftritt; das führt auf den Ansatz ∂ ∂2 Ψ(x, t) = γ 2 Ψ(x, t) . ∂t ∂x (2.14) Einsetzen der Wellenfunktion (2.8) liefert −i ω C ei (k x−ω t) = γ (−k 2 ) C ei (k x−ω t) (2.15) mit γ = i�E iω = . k2 p2 (2.16) D.h. die gesuchte DGL ist 15 2.3. DARSTELLUNG VON ENERGIE UND IMPULS DURCH (DIFFERENTIAL-)OPERATOREN i� �2 ∂ 2 ∂ Ψ(x, t) . Ψ(x, t) = − ∂t 2m ∂x2 (2.17) Dies ist die Schrödinger–Gleichung für ein freies Teilchen in einer Dimension. 2.2.2 Freies Teilchen in 3 Dimensionen Aus den Überlegungen in den Abschnitten 2.1.2 und 2.1.3 kann man sofort die Verallgemeinerung auf 3 Raumdimensionen erschließen, i� ∂ �2 �2 � 2 Ψ(�r, t) = − ∇ Ψ(�r, t) = − Δ Ψ(�r, t) . ∂t 2m 2m (2.18) Dies ist die Schrödinger–Gleichung für ein freies Teilchen in 3 Dimensionen. Notation. In (2.18) verwenden wir den Gradienten (in kartesischen Koordinaten) ∂ � = ∇ ∂x ∂ ∂y ∂ ∂z und den Laplace–Operator � ·∇ � = ∇ � 2 = Δ = ∇ 2.3 ∂2 ∂2 ∂2 + + . ∂x2 ∂y 2 ∂z 2 Darstellung von Energie und Impuls durch (Differential-)Operatoren Offenbar können wir die Energie und den Impuls mit Operatoren identifizieren, ∂ , ∂t � . Impuls p� ↔ −i �∇ Energie E ↔ i � (2.19a) (2.19b) Wir werden später sehen, dass in der Quantenmechanik physikalisch beobachtbare Größen (Observablen) durch Operatoren dargestellt werden. 16 2.4. HAMILTON–OPERATOR 2.4 Hamilton–Operator 2.4.1 Hamilton–Operator für ein freies Teilchens Hamilton–Funktion in der klassischen Mechanik. In der klassischen Mechanik kann man ein System durch die Hamilton–Funktion H(qi , pi , t) beschreiben; die pi bzw. qi bezeichnen dabei die (verallgemeinerten) Impulse bzw. Koordinaten. Die Dynamik des Systems wird dann bestimmt durch die Differentialgleichung ṗj = − ∂H(qi , pi , t) ∂qj und q̇j = ∂H(qi , pi , t) . ∂pj (2.20) Für ein konservatives“ System ist H(qi , pi , t) = H(qi , pi ), d.h. H ist nicht explizit ” ” von der Zeit abhängig“. Die Hamilton–Funktion H(pi , qi ) beschreibt dann die erhaltene Energie des Systems. Beispiel: Freies Teilchen in 3 Dimensionen. H = H(� p) = p� 2 ≡ E. 2m Hamilton–Operator in der Quantenmechanik. Nachdem wir gesehen haben, dass wir die Energie mit einem (Differential-)Operator identifizieren können, und dass die Energie eines klassischen Systems durch die Hamilton–Funktion gegeben ist, ist es naheliegend, einen Hamilton–Operator zu erklären durch H = − �2 � 2 �2 ∇ = − Δ. 2m 2m (2.21) Dies ist der Hamilton–Operator für ein freies Teilchen in 3 Dimensionen. Später werden wir Hamilton–Operatoren für andere Systeme erklären, die, durch Anwenden auf die entsprechende Wellenfunktion, ebenfalls die Energie des Teilchens liefern. Notation. Operatoren werden in diesen Notizen stets fett gesetzt. In der Literatur wird oftmals von der Konvention Gebrauch gemacht, Operatoren durch Hüte kenntlich zu machen. Mit dieser Definition kann man die Schrödinger–Gleichung schreiben als i� ∂ Ψ(�r, t) = H Ψ(�r, t) . ∂t (2.22) 17 2.4. HAMILTON–OPERATOR 2.4.2 Hamilton–Operator für ein Teilchen im Potential V Klassische Hamilton–Funktion für ein Teilchen im Potential V . Zur Beschreibung eines klassischen Systems, in dem sich ein Teilchen im Potential V bewegt, verwendet man die Hamilton–Funktion H(q, p) = p2 + V (q) . 2m (2.23) Die Dynamik des Teilchens ist dann ebenfalls durch (2.20) gegeben. Hamilton–Operator für die quantenmechanische Beschreibung eines Teilchens im Potential V . Damit ist es naheliegend, für den Hamilton–Operator in der quantenmechanischen Beschreibung des Systems anzusetzen H = − �2 Δ+V 2m (2.24) Hierbei ist V eine Funktion vom Ort; später werden wir zulassen, dass V ein Operator ist. Schrödinger–Gleichung für ein Teilchen im Potential V . Operator (2.24) lautet die Schrödinger–Gleichung � � ∂ �2 Δ + V Ψ(�r, t) = i � Ψ(�r, t) . H Ψ(�r, t) = − 2m ∂t Mit dem Hamilton– (2.25) Der Hamilton–Operator bestimmt also die zeitliche Entwicklung der Wellenfunktion. Stationäre Systeme. Falls V nicht explizit von der Zeit t abhängt, kann die Lösung der Schrödinger–Gleichung (2.25) durch einen Separationsansatz bestimmt werden, � � iE t Ψ(�r, t) = ψ(�r) exp − . (2.26) � Einsetzen liefert ∂ i � Ψ(�r, t) = i � ∂t � � � � iE t iE ψ(�r) exp − = E Ψ(�r, t) . − � � (2.27) Damit ergibt sich die stationäre Schrödinger–Gleichung H Ψ(�r, t) = E Ψ(�r, t) . (2.28) Die zeitliche Entwicklung ist durch (2.26) festgelegt; es genügt also, 18 2.5. WELLENPAKETE H ψ(�r) = E ψ(�r) (2.29) zu lösen. Diese Gleichung ist eine Eigenwertgleichung, wobei E dem Eigenwert bzgl. des Hamilton–Operators H und Ψ der Eigenfunktion entsprechen. Bemerkung: Gleichung (2.29) beschreibt ein Eigenwertproblem, wie es aus der linearen Algebra geläufig ist. Dort hat man es oft mit Matrixgleichungen der Form Av = λv 0 zu tun, wo A eine Matrix bezeichnet und λ ∈ ist. Durch Lösen dieser Gleichung kann man die Matrix A, die eine lineare Abbildung zwischen Vektorräumen repräsentiert, diagonalisieren. 2.5 Wellenpakete 2.5.1 Eindimensionale Wellenpakete Erinnern wir uns zunächst an die Wellenfunktion für ein freies Teilchen in 1D, � � � p · x� Ep · t p2 exp −i . (2.30) Ψp (x, t) = Cp exp i mit Ep = � � 2m Diese löst die Schrödinger–Gleichung für ein freies Teilchen (2.17). i� ∂ �2 ∂ 2 Ψ(x, t) . Ψ(x, t) = − ∂t 2m ∂x2 Wenn man zwei Lösungen der Schrödinger–Gleichung gefunden hat, � � ∂ �2 ∂ 2 i� + (i = 1, 2) , Ψ(i) (x, t) = 0 ∂t 2m ∂x2 dann löst offensichtlich auch die Summe dieser Ψi die Schrödinger–Gleichung, �� � � �2 ∂ 2 ∂ (1) (2) (x, t) + Ψ (x, t) = 0. Ψ + i� ∂t 2m ∂x2 M.a.W. für Lösungen der (freien) Schrödinger–Gleichung gilt — ebenso wie für Lösungen der Wellengleichung in der Elektrodynamik — das Superpositionsprinzip. Das impliziert, dass die kontinuierliche Superposition“ ” �� � � �∞ p2 i px − t (2.31) Ψ(x, t) = dp Cp exp � 2m −∞ 19 2.6. WAHRSCHEINLICHKEITSINTERPRETATION ebenfalls Lösung der Schrödinger–Gleichung ist. Wir fordern, dass die Koeffizientenfuktion Cp die Bedingung der Quadrat–Integrabilität erfüllt, d.h. �∞ dp |Cp |2 < ∞ . −∞ Für Wellenfunktionen, die physikalische Zustände beschreiben, werden wir eine Normierung auf 1 fordern, die durch Reskalieren erreicht werden kann, solange obiges Integral endlich ist. 2.5.2 Dreidimensionale Wellenpakete Die Verallgemeinerung auf drei Raumrichtungen ist offensichtlich. Aus dem Superpositionsprinzip ergibt sich auch hier wieder eine Lösung der Schrödinger–Gleichung Ψ(�r, t) = � � �∞ wobei 3 d p := � i d p Cp� exp � −∞ 3 dpx −∞ dpy �∞ p� 2 p� · �r − t 2m �� , (2.32) dpz −∞ � und wir fordern, dass d3 p |Cp� |2 < ∞ bzw. nach geeigneter Reskalierung d3 p |Cp� |2 = 1. 2.6 � �∞ � Wahrscheinlichkeitsinterpretation Bisher haben wir uns Wellenfunktionen Ψ(�x, t) angesehen und Differentialgleichungen hergeleitet“. Nun wollen wir die physikalische Interpretation der Wellenfunktion ” klären. 2.6.1 Wahrscheinlichkeitsdichte Die Hypothesen für die Interpretation der Wellenfunktionen Ψ(�x, t) sind I. Ψ(�r, t) ist die Wahrscheinlichkeits–Amplitude einer Welle, welche die Bewegung in Raum und Zeit beschreibt, Ψ(�r, t) ↔ Teilchen . II. ρ(�r, t) = |Ψ(�r, t)|2 = Ψ∗ (�r, t) · Ψ(�r, t) ist die Wahrscheinlichkeitsdichte dafür, dass sich das Teilchen zur Zeit t am Ort �r aufhält. 20 2.6. WAHRSCHEINLICHKEITSINTERPRETATION Räumliche Wahrscheinlichkeitsverteilung. Volumenelement Mit dem �r d3 r = dx dy dz dz dx dy wird die Wahrscheinlichkeit dafür, dass das Teilchen sich zur Zeit t am Ort �r im Volumenelement d3 r befindet, zu w(�r, t) = ρ(�r, t) · d3 r = |Ψ(�r, t)|2 · d3 r . Normierung. Die Wellenfunktion muss normiert sein, das heißt, es muss zu jeder Zeit t gelten, dass � � � ! d3 r |Ψ(�r, t)|2 = d3 r Ψ∗ (�r, t) Ψ(�r, t) = 1 . (2.33) d3 r ρ(�r, t) = D.h. wir fordern, dass zu jeder Zeit t sich das Teilchen irgendwo aufhält. Dies impliziert insbesondere Wahrscheinlichkeitserhaltung. Wir werden später in Abschnitt 2.6.4 sehen, dass, wenn man die Normierung (2.33) für eine Zeit t0 fordert, Lösungen der Schrödinger–Gleichung auch zu allen anderen Zeiten t normiert sind. Beispiel: Freies Teilchen in kubischer Box mit Volumen V . Wellenfunktion für festes p�, � � � i � p� · �r − Ep� t Ψp� (�r, t) = Cp� exp � Betrachte die mit Ep� = p� 2 /(2m). Aus der Forderung, dass das Teilchen irgendwo zu finden sein muss, folgt � � ! 1 = d3 r ρ(�r, t) = d3 r |Cp� |2 = V · |Cp� |2 . V V Das bedeutet, dass ei α Cp� = √ V ist, wobei α eine beliebige reelle Zahl ist. Insbesondere ist die Wahrscheinlichkeit für den Aufenthalt des Teilchens überall gleich groß. 21 2.6. WAHRSCHEINLICHKEITSINTERPRETATION 2.6.2 Beispiel: Gaußsche Wellenpakete in 1D Betrachten wir nun die Wellenfunktion �� � � �∞ p2 i t , px − Ψ(x, t) = dp Φ(p) exp � 2m (2.34) −∞ wobei wir für die Koeffizienten–Funktion Φ(p) eine Gauß–Verteilung (Abbildung 2.3) ansetzen, d.h. � � � � 1 p − p0 2 Φ(p) = A exp − . (2.35) 2 Δp Δp ist ein Maß für die Breite der Gauß–Verteilung. Aus den beiden Gleichungen (2.34) |Φ(p)|2 Δp p0 p Abbildung 2.3: Gauß–Verteilung. und (2.35) erhält man dann zur Zeit t = 0 die Wellenfunktion Ψ(x, t = 0) = �∞ dp Φ(p) exp −∞ Vektorraum �∞ −∞ 02 . � ipx � � . Sei f quadrat–integrabel, d.h. dx |f (x)|2 = endlich . (2.37) Der Vektorraum der quadrat–integrablen Funktionen wird mit �∞ 2 = → ; dx |f (x)|2 = endlich . f : � (2.36) � 0 −∞ 22 �2 bezeichnet, (2.38) 2.6. WAHRSCHEINLICHKEITSINTERPRETATION � Fourier–Transformation. Man erklärt die Fourier–Transformierte von f ∈ 2 durch �∞ dx √ e−i k·x f (x) . (2.39) f�(k) = 2π −∞ Die Fourier–Rücktransformierte ist gegeben durch f (x) = �∞ −∞ dk √ ei k·x f�(k) . 2π (2.40) √ Konvention. Die 2π–Faktoren sind eine Konvention. Wir benutzen die Konvention, die beispielsweise in [Griffiths] aber nicht in [Schwabl 1] verwendet wird. Fourier–Transformierte einer Gauß–Verteilung. Die Fourier–Transformierte einer Gauß–Verteilung ist wieder eine Gauß–Verteilung (vgl. Übungs–Blatt 1), d.h. die Funktion � � x2 1 (2.41a) exp − 2 f (x) = �√ 2λ πλ besitzt die Fourier–Transformierte �∞ dx � √ f (x) e−i k x f (k) = 2π −∞ � � 2 2� λ λ k √ exp − = . 2 π (2.41b) Insbesondere ist Φ(p) bis auf Vorfaktoren die Fouriertransformierte von Ψ(x, t = 0). Zeitliche Entwicklung des Gaußschen Wellenpakets. Nun betrachten wir die zeitliche Entwicklung des Gaußschen Wellenpakets (2.34). Zur Auswertung der p– Integrale schreibt man den Integranden in (2.34) in der Form � � �� exp − a p2 − 2b p + c . Hier haben wir die Hilfsvariablen a := 1 it + , 2 (Δp)2 2m � b := ix p0 + 2(Δp)2 2� und c := 1 2 � p0 Δp �2 definiert. Einsetzen dieser Hilfsvariablen in die Gleichungen (2.34) und (2.35) liefert � � � � �∞ b 2 b2 −c + Ψ(x, t) = A dp exp −a p − a a −∞ 23 2.6. WAHRSCHEINLICHKEITSINTERPRETATION = A exp = A � � b2 −c a � � � b 2 dp exp −a p − a −∞ � �� � √π � � �∞ = � b2 π exp −c a a � =: A � a π exp [Z] a b2 mit Z = Re(Z) + i Im(Z) = − c. Also ergibt sich a � π exp [Re(Z) + i Im(Z)] , Ψ(x, t) = A a � π ∗ ∗ Ψ (x, t) = A exp [Re(Z) − i Im(Z)] , a∗ π exp [2 · Re(Z)] . Ψ∗ Ψ = |A|2 |a| Nun machen wir die Nebenrechnungen � 1� 2 Z = b − ac a� � t p20 x2 i p0 x i p20 p20 1 − + − − = a 4 (Δp)4 4�2 2� (Δp)2 4 (Δp)4 4 m � (Δp)2 �� � � 1 i p20 x2 = t x − p − 2+ 0 a 4� 2� (Δp)2 2m und 1 it − 2 1 2 (Δp) 2m � = = 2 a |a| t2 1 + 4(Δp)4 4m2 �2 t (Δp)4 (Δp)2 − i m� . = 2 t2 (Δp)4 1+ m2 �2 Damit wird � � � � � 2 � � � 1 1 Re b − a c − Im Im b2 − a c Re Z = Re a a � 2� �� � � �� −x 1 p20 2 t (Δp)4 2 − p0 x − = (Δp) t 4�2 2� (Δp)2 2m m� t2 (Δp)4 1+ 2 2 m � (Δp)2 � � p �2 � 2 1 p0 0 2 � = − x − 2 tx + t . 2 4 2 m m t (Δp) 1+ m2 �2 a∗ 24 2.6. WAHRSCHEINLICHKEITSINTERPRETATION Somit können wir den Realteil von Z schreiben als � � x − v0 t 2 , 2 Re(Z) = − Δx(t) wobei v0 p0 = m Damit ist |Ψ(x, t)|2 � Δx(t) = Δp und � � � (Δp)2 2 1+ t . m� � � �2 � x − v t π 0 . exp − = |A|2 |a| Δx(t) Der Vorfaktor A ist durch die Normierung � ! dx |Ψ(x, t)|2 = 1 festgelegt. Das Endergebnis für die Aufenthaltswahrscheinlichkeit ist � � �2 � t x − v 1 0 . exp − ρ(x, t) = |Ψ(x, t)|2 = √ Δx(t) π Δx(t) (2.42) Die Interpretation des Ergebnisses ist in Abbildung 2.4 dargestellt: Das Wellenpaket wandert“ und zerfließt“. Die Gruppengeschwindigkeit eines Wellenpakets ist gege” ” |Ψ(x, t = 0)|2 |Ψ(x, t > 0)|2 x x Abbildung 2.4: Zerfließen eines Wellenpakets. ben durch v0 = � dE(p) dp � = p=p0 d(� ω) . d(� k) (2.43) 25 2.6. WAHRSCHEINLICHKEITSINTERPRETATION Mit der Energie–Impuls–Beziehung ( Dispersionsrelation“) für ein nicht–relativistisches ” Teilchen E(p) = p2 2m bekommt man p0 . v0 = m Dies ist die sog. Gruppengeschwindigkeit, die mit der klassischen Geschwindigkeit des Teilchens übereinstimmt. Diese sollte nicht mit Phasengeschwindigkeit E(p)/p = p/(2m) verwechselt werden. Zur Zeit t = 0 gilt Δx · Δp = � . Allgemein lässt sich zeigen, dass Δx · Δp ≥ � 2 (2.44) gilt. Dies ist die Heisenbergsche Unschärferelation, die wir später in Abschnitt 4.4 herleiten werden. 2.6.3 Exkurs : δ–Funktion“ ” Im Folgenden soll die sog. δ–Funktion diskutiert werden. Diese ist keine Funktion im eigentlichen Sinne, sondern eine Distribution. Definition der δ– Funktion“. Sei f (x) stetig. Dann ist die δ–Funktion (eigent” lich: δ–Distribution) definiert durch �∞ −∞ dx f (x) δ(x − a) = f (a) . (2.45) � Ist f (�r) stetig, so gilt im 3 � d3 r f (�r) δ (3) (�r − �a) = f (�a) . (2.46) In kartesischen Koordinaten setzt man dabei δ (3) (�r − �a) = δ(x − ax ) · δ(y − ay ) · δ(z − az ) . Bemerkung: Gleichung (2.45) impliziert sofort, dass �∞ −∞ dx δ(x − a) = 1 . 26 (2.47) 2.6. WAHRSCHEINLICHKEITSINTERPRETATION Darstellung der δ– Funktion“ durch Grenzwerte. Es gibt verschiedene Möglich” keiten, δ als Limes von regulären Funktionen zu verstehen. Drei dieser Möglichkeiten sind � �� � 1 (x − a)2 1 (Gauß–Funktion), i) δ(x − a) = √ lim √ exp − ε π ε�0 ε � � 1 ε ii) δ(x − a) = (Lorentz–Funktion), lim π ε�0 ε2 + (x − a)2 � � sin (� · (x − a)) 1 iii) δ(x − a) = lim . π �→∞ x−a Die letzten beiden Funktionen sind in Abbildung 2.5 dargestellt. Durch Nachrechnen bestätigt man, dass diese Funktionen unabhängig von ε bzw. � auf 1 normiert sind, d.h. � � �� �∞ 1 (x − a)2 1 √ exp − dx √ 1 = ε π ε = = −∞ �∞ −∞ �∞ −∞ 1 dx π � ε 2 ε + (x − a)2 � � � 1 sin (� · (x − a)) dx . π x−a | a | a (a) Lorentz–Funktion. (b) Sinus. Abbildung 2.5: δ als Limes einer Folge regulärer Funktionen. 27 2.6. WAHRSCHEINLICHKEITSINTERPRETATION Fourier–Darstellung. Die δ–Funktion kann (bis auf Transformierte der 1 geschrieben werden, denn �∞ dx e ikx −∞ = lim �L L→∞ −L √ 2π–Faktoren) als Fourier– dx ei k x � 1 � ikL e − e−i k L L→∞ i k sin k L = 2 lim L→∞ k = 2π δ(k) . = lim Damit hat man in einer Dimension �∞ � dx ei (k−k ) x = 2π δ(k − k � ) (2.48) −∞ und in � �3 � � � )·� r d3 r ei (k−k = (2π)3 δ (3) (�k − �k � ) . (2.49) Die Fourier–Transformierte einer ebenen Welle ist also die δ–Distribution. Anschaulich bedeutet das, dass die Frequenz–Verteilung für eine monochromatische Welle überall verschwindet außer bei der Frequenz eben dieser Welle. Fourier–Transformation in 3D. � d3 r |f (�r)|2 = endlich . Sei f quadrat–integrabel, d.h. 03 Dann erklärt man die Fourier–Transformierte von f durch � d3 r � � � e−i k·�r f (�r) . f (k) = 3/2 (2π) Die Fourier–Rücktransformierte ist gegeben durch � d3 k � ei k·�r f�(�k) . f (�r) = 3/2 (2π) (2.50) (2.51) Mit der Eigenschaft (2.49) von δ kann man sich leicht davon überzeugen, dass die Rück–Transformation wieder auf die ursprüngliche Funktion führt, � � d3 r� −i �k·�r � d3 k i �k·� r e e f (�r � ) f (�r) = (2π)3/2 (2π)3/2 � � d3 r � d3 k � � � = f (� r ) ei k·(�r−�r ) (2π)3/2 (2π)3/2 � = d3 r� f (�r � ) · δ (3) (�r − �r � ) = f (�r) . 28 2.6. WAHRSCHEINLICHKEITSINTERPRETATION 2.6.4 Kontinuitätsgleichung Wir hatten ρ(�r, t) = |Ψ(�r, t)|2 als Wahrscheinlichkeitsdichte interpretiert. Für freie Teilchen gilt die Schrödinger–Gleichung (2.18) �2 ∂Ψ(�r, t) = − Δ Ψ(�r, t) . ∂t 2m Diese können wir verwenden, um die Zeitableitung von ρ zu berechnen, ∂Ψ∗ ∂Ψ ρ̇(�r, t) = (�r, t) Ψ(�r, t) + Ψ∗ (�r, t) (�r, t) . ∂t ∂t Einsetzen der Schrödinger–Gleichung liefert � 2� � 1 [Ψ(�r, t) ΔΨ∗ (�r, t) − Ψ∗ (�r, t) ΔΨ(�r, t)] ρ̇(�r, t) = i � 2m � � � � �� � ∗ � r, t) . = ∇ ∇Ψ (�r, t) Ψ(�r, t) − Ψ∗ (�r, t) ∇Ψ(� 2m i i� Wahrscheinlichkeits–Stromdichte � . Die Wahrscheinlichkeits–Stromdichte ist erklärt durch � � � � � � � ∗ � r, t) − ∇Ψ � ∗ (�r, t) Ψ(�r, t) . Ψ (�r, t) ∇Ψ(� (2.52) �(�r, t) := 2m i Daraus folgt die Kontinuitätsgleichung � · �(�r, t) = 0 . ρ̇(�r, t) + ∇ (2.53) Interpretation: Die Interpretation dieser Gleichung ist aus der Elektrodynamik geläufig. Sie besagt, dass die lokale Änderung der Dichte Konsequenz eines Stromes von � ist. Während in der Elektrodynamik Ladungsströme diskutiert werden und die Kontinuitäts–Gleichung Ladungserhaltung impliziert, beschreibt (2.53) Wahrscheinlichkeitserhaltung. Um das zu sehen, betrachten wir die Gesamtwahrscheinlichkeit � (2.54) W = d3 r ρ(�r, t) . Diese besitzt die Zeitableitung � d W = d3 r ρ̇(�r, t) dt � = − d3 r �(�r, t) = 0 , (2.55) wobei wir den Gauß’schen Satz verwendet haben und annehmen, dass Ψ und somit auch ρ im Unendlichen verschwinden. Das bedeutet insbesondere, dass, falls Ψ(�r, t) zu einem Zeitpunkt t0 normiert ist und eine Lösung der Schrödinger–Gleichung ist, für alle Zeiten t normiert bleibt. 29 2.6. WAHRSCHEINLICHKEITSINTERPRETATION Beispiel (Stromdichte eines freien Teilchens): Wir betrachten die ebene Welle i Ψ(�r, t) = C e � (�p·�r−E t) , so dass ρ = |C|2 . Für ein gegebenes Volumen kann man dann |C| bestimmen (vgl. das Beispiel auf Seite 21); ausserhalb des Volumens verschwindet die Wellenfunktion. Dann ist � � � � � � � i p� i p� ∗ ∗ �(�r, t) = Ψ (�r, t) Ψ(�r, t) − − Ψ (�r, t) Ψ(�r, t) 2m i � � � � � 2i p� ∗ = Ψ (�r, t) Ψ(�r, t) 2m i � p� ∗ Ψ (�r, t) Ψ(�r, t) = m p� = ρ(�r, t) m = ρ(�r, t) · �v mit der (Gruppen-)Geschwindigkeit (vgl. (2.43)) �v . 2.6.5 Wellenfunktion im Impulsraum Bisher haben wir Wellenfunktionen als Funktionen der Ortsvariablen aufgefasst. Man kann jedoch ebensogut eine Wellenfunktion im Impulsraum erklären. Wir betrachten eine kontinuierliche Superposition von ebenen Wellen, � i i (2.56) Ψ(�r, t) = d3 p C(� p) e � p�·�r · e− � Ep ·t , wobei Ep = p �2 2m . Damit erhält man die Darstellung � i d3 p Ψ(�r, t) = Φ(� p, t) · e � p�·�r . 3/2 (2π�) (2.57) Φ(� p, t) bezeichnet die Impulsverteilung und kann als Wellenfunktion im Impulsraum verstanden werden. Man erhält sie — bis auf �–Faktoren — als Fourier–Transformierte der Wellenfunktion im Ortsraum, � d3 r − �i p �·� r Φ(� p, t) = e Ψ(�r, t) . (2.58) (2π�)3/2 Es gilt � d3 r |Ψ(�r, t)|2 � � � i i d3 p� d3 p � 3 Φ∗ (� p, t) · e− � p�·�r Φ(� = d r p � , t) · e � p� ·�r 3/2 3/2 (2π �) (2π �) � � � 3 d p � 3 � ∗ � p, t) · Φ(� p , t) · d3 ρ e−i (�p−�p )·�ρ d p Φ (� = 3 (2π) 1 = 30 (2.59) 2.6. WAHRSCHEINLICHKEITSINTERPRETATION mit ρ � = �r/�, so dass �3 d3 ρ = d3 r. Nun verwenden wir Gleichung (2.49) und erhalten � � d3 p p, t) · Φ(� p � , t) · (2π)3 δ (3) (� p − p� � ) d3 p� Φ∗ (� (2π)3 � (2.59) = d3 p |Φ(� p, t)|2 = 1 . (2.60) Interpretation: Man kann w(� p, t) = |Φ(� p, t)|2 als Wahrscheinlichkeitsdichte dafür auffassen, dass das Teilchen einen Impuls im Intervall [� p, p� + Δ� p] mit Δ� p = (dpx , dpy , dpz ) besitzt. Entsprechend gibt w(� p, t) d3 p die (infinitesimale) Wahrscheinlichkeit dafür an, ein Teilchen zur Zeit t mit Impuls p� im (infinitesimalen) Impuls–Volumenelement d3 p zu finden. Fazit: Die Funktion Φ(� p, t) trägt die selbe Information wie die Wellenfunktion Ψ(�r, t); Φ(� p, t) und Ψ(�r, t) gehen durch Fourier–(Rück-)Transformation auseinander hervor, Fourier–Transformation Ψ(�r, t) ← −−−−−−−−−−−−−−−−−→ Φ(� p, t) Fourier–Rücktransformation bis auf �–Faktoren. Der abstrakte Zustand, in dem sich das entsprechende Teilchen befindet, kann also sowohl durch Ψ(�r, t) als auch durch Φ(� p, t) beschrieben werden. Bemerkung (Sätze von Plancherel und Parseval). Für festes t kann Φ(� p, t) als Fourier–Transformierte von Ψ(�x, t) aufgefasst werden. Allgemein haben eine Funktion und ihre Fouriertransformierte die gleiche Normierung, d.h. es gilt die Identität � d3 r |f (�r)|2 = � � �2 � � d3 k �f�(�k)� (2.61) die auch als Satz von Plancherel bekannt ist. Es gilt sogar noch allgemeiner das sog. Parsevalsche Theorem, das besagt, dass � 3 ∗ d r f (�r) g (�r) = � d3 k f�(�k) g�∗ (�k) . Damit läßt sich zeigen, dass die Fourier–Transformation auch für wohldefiniert ist. 31 (2.62) �2–Funktionen 2.7. ERWARTUNGSWERTE UND SCHWANKUNGEN 2.7 Erwartungswerte und Schwankungen 2.7.1 Mittelwerte (Erwartungswerte) von Ort und Impuls Ortserwartungswert in einer Dimension. Mit der Interpretation von ρ als Wahrscheinlichkeitsdichte können wir Erwartungswerte erklären. Der Orts–Erwartungswert ist für festes t erklärt durch �x� = �∞ −∞ dx ρ(x, t) x = �∞ dx Ψ∗ (x, t) x Ψ(x, t) . (2.63) −∞ Dies ist der Erwartungswert für die Messung des Ortes eines Teilchens im Zustand, der durch Ψ(x, t) beschrieben wird. Warnung. �x� ist nicht, was man bekommt, wenn man ein Teilchen in den Zustand Ψ(x, t) setzt, den Ort sehr oft misst und dann über die Ergebnisse mittelt. Vielmehr ist �x� das Ergebnis der folgenden Prozedur: Man setzt jedes Mal erneut das Teilchen in den Zustand Ψ(x, t) und misst dann den Ort. �x� ergibt sich dann, wenn man über viele solche Messungen mittelt. Ortserwartungswerte in drei Dimensionen. Die Verallgemeinerung auf drei Dimensionen ist offensichtlich. Beispielsweise ist der Erwartungswert der x–Komponente gegeben durch � �x� = d3 r x · |Ψ(�r, t)|2 . Analog kann man �y� und �z� definieren. Der Erwartungswert des Vektors �r ist dementsprechend � � 3 2 ��r� = d r �r |Ψ(�r, t)| = d3 r Ψ∗ (�r, t) �r Ψ(�r, t) . (2.64) Die Sandwich–Struktur“ Ψ∗ �r Ψ wird hier aus Gründen, die später klar werden, ver” wendet. Für die Berechnung der Impuls–Erwartungswerte kann man (2.58) verwenden, � i d3 r Φ(� p, t) = e− � p�·�r Ψ(�r, t) , 3/2 (2π �) und damit den Erwartungswert der Impulskomponente in x–Richtung berechnen, � � 3 2 d p px |Φ(� p, t)| = d3 p Φ∗ (� p, t) px Φ(� p, t) . �px � = ∂ Alternativ kann man den Impuls–Operator px = −i � ∂x und die Ortswellenfunktion Ψ(�r, t) benutzen, � �px � = d3 p Φ∗ (� p, t) px Φ(� p, t) 32 2.7. ERWARTUNGSWERTE UND SCHWANKUNGEN �∗ � �� d3 r d3 r � − �i p − �i p �·� r� � �·� r e e Ψ(�r , t) px Ψ(�r, t) = d p (2π�)3/2 (2π�)3/2 � � � i d3 r d3 r � � ∗ � 3 Ψ (� r , t) d p px e− � p�·(�r−�r ) Ψ(�r, t) = 3/2 3/2 (2π�) (2π�) � � � � � 1 ∂ − i p�·(�r−�r � ) 3 � ∗ � 3 3 = Ψ(�r, t) . e � d r Ψ (�r , t) d p d r i � (2π�)3 ∂x (2.65) � 3 �� Nun nehmen wir an, dass Ψ(�r, t) für x → ±∞ verschwindet, dann erhalten wir durch partielle Integration � � � � � � ∂ ∂ − i p�·(�r−�r � ) 3 3 − �i p �·(� r −� r �) � e Ψ(�r, t) , Ψ(�r, t) = d re −i � d r i� ∂x ∂x so dass (2.65) umgeformt werden kann zu � � � � � 1 ∂ 3 3 � ∗ � 3 − �i p �·(� r −� r �) Ψ(�r, t) d r d r Ψ (�r , t) d p e �px � = −i � (2π�)3 ∂x �� � � � i 1 ∂ � = d3 r� Ψ∗ (�r � , t) d3 p e− � p�·(�r−�r ) Ψ(�r, t) d3 r −i � 3 (2π�) ∂x �� � � � � ∂ 1 3 d3 r� Ψ∗ (�r � , t) (2π�)3 δ (3) �r − �r � Ψ(�r, t) d r −i � = 3 (2π�) ∂x � � � ∂ 3 ∗ = d r Ψ (�r, t) −i � Ψ(�r, t) . (2.66) ∂x M.a.W., wir können den Erwartungswert des Impulses auch ermitteln, indem wir den ∂ in Ortsdarstellung, d.h. mit der Erwartungswert des Impuls–Operators px = −i � ∂x �r–abhängigen Wellenfunktion Ψ(�r, t) berechnen. Diese Aussage verallgemeinert sich für den Erwartungswert des 3er–Impulses entsprechend zu � � 3 2 �� p� = d p p� |Φ(� p, t)| = d3 p Φ∗ (� p, t) p� Φ(� p, t) � � � � Ψ(�r, t) . (2.67) = d3 r Ψ∗ (�r, t) −i � ∇ Insbesondere ist es in der letzten Zeile wesentlich, dass wir die unter (2.64) angesprochene Sandwich–Struktur“ verwenden. ” Völlig analog können wir die Wellenfunktion in Impulsdarstellung Φ(� p, t) verwenden, um den Ortserwartungswert zu bestimmen. Man erhält � � � � � ∂ ∂ ∂ 3 ∗ � � p, t) i � ∇p Φ(� p, t) mit ∇p = ��r� = d p Φ (� . (2.68) , , ∂px ∂py ∂pz Fazit. Mittelwerte der Messgrößen Impuls und Ort berechnen sich über die Sandwich– ” Formel“ 33 2.7. ERWARTUNGSWERTE UND SCHWANKUNGEN �O� = � 3 ∗ d r Ψ (�r, t) O Ψ(�r, t) = � d3 p Φ∗ (� p, t) O Φ(� p, t) , (2.69) wobei O den Orts- bzw. Impulsoperator bezeichnet. Abhängig davon, ob wir in Orts– Darstellung oder Impuls–Darstellung arbeiten, d.h. ob wir das Teilchen durch die Wellenfunktion im Ortsraum Ψ(�r, t) oder im Impulsraum Φ(�r, t) beschreiben, ist O eine gewöhnliche Zahl oder ein Operator (siehe Tabelle 2.1). Ortsdarstellung Impulsdarstellung �p Ort �r i�∇ � Impuls −i � ∇ p� Tabelle 2.1: Orts- und Impulsoperator in Orts- bzw. Impuls–Darstellung. 2.7.2 Mittlere Schwankungsquadrate (Unschärfen) Schwankungsquadrat. (Δx)2 Als Schwankungsquadrat für den Ort setzt man � � � 2 = (Δx) = d3 r (x − �x�)2 |Ψ(�r, t)|2 und entsprechend für den Impuls � � � 2 2 (Δpx ) = (Δpx ) = d3 p (px − �px �)2 |Φ(� p, t)|2 . (2.70) (2.71) Man kann sich leicht überlegen, dass (Δx)2 = �x2 � − �x�2 (2.72) und entsprechend für (Δp)2 . Die Schwankungen von Ort und Impuls sind erklärt über � Δx := (Δx)2 , (2.73a) � 2 (Δpx ) . (2.73b) Δpx := Beispiel (Gauß–Verteilung): Sehen wir uns an, was diese Größen für die Gauß– Verteilung sind. Für die Wurzel“ einer Gauß–Verteilung ” x2 1 fλ (x) = � √ e− 2 λ2 (2.74) λ π erhält man durch Fouriertransformation � k2 λ2 k 2 1 λ √ e− 2 =: √ e− λ�2 = f1/λ (k) . f�λ (k) = � π π λ 34 (2.75) 2.8. WEITERE BEGRIFFE Sowohl fλ als auch f�λ sind auf 1 normiert, d.h. �∞ −∞ dx |fλ (x)| 2 = �∞ −∞ Die Breite für |fλ |2 ist (Δx) 2 = �∞ −∞ dk |f�λ (k)|2 = 1 . dx x2 |fλ (x)|2 = λ2 . 2 (2.76) D.h., die Breiten von fλ und f�λ sind invers zueinander. Durch Einsetzen von p = � k finden wir (vgl. Zentralübung 2), dass Δx · Δpx ≥ � . 2 (2.77) Dies ist die Heisenbergsche Unschärferelation, die wir später in Abschnitt 4.4 beweisen werden. Interpretation. Das bedeutet, dass man nicht zugleich den Ort und den Impuls beliebig scharf messen kann. Wenn wir ein Wellenpaket Ψ(x, t) haben, das — für ein festes t — im Ortsraum eine sehr scharfe Verteilung ρ(x, t) = |Ψ(x, t)|2 besitzt, so ist die Verteilung |Φ(p, t)|2 im Impulsraum notwendigerweise breit und umgekehrt. Höhere Momente. �x� und �x2 � sind Beispiele für Momente der Verteilung w(x) = ρ(x, t) für festes t. Allgemein ist das n–te Moment einer Verteilung gegeben durch � n dx xn w(x) (2.78) �x � = mit der offensichtlichen Verallgemeinerung zu mehreren Dimensionen. Man kann sich nun fragen, ob diese Aussage lediglich für das Paar Ort und Impuls zutrifft. Tatsächlich ist das nicht der Fall, man findet analoge Relationen für andere Messgrößen. Wie wir nun sehen werden kann man anhand von sog. Kommutatoren festmachen, ob solche Unschärferelationen auftreten oder nicht. 2.8 Weitere Begriffe 2.8.1 Kommutatoren Der Kommutator von a und b ist definiert durch [a, b] := a b − b a . (2.79) 35 2.8. WEITERE BEGRIFFE Wir werden an Kommutatoren von Operatoren interessiert sein. Diese berechnet man, indem man sie auf eine (Test-)Funktion f anwendet, z.B. � � ∂ ∂f ∂ x, f = x − (x · f ) ∂x ∂x ∂x = x · f� − f − x · f� = − f = (−1) · f . Also ist der Wert des Kommutators � � ∂ = −1. x, ∂x � Dies liefert mit dem Impulsoperator p � = −i � ∇ [x, px ] = x px − px x � � � � ∂ ∂ = x −i � − −i � x ∂x ∂x = i� . Verallgemeinerung: (2.80) Die Relation (2.80) verallgemeinert sich zu [xj , pk ] = i � δjk , wobei δjk das Kronecker–Delta bezeichnet, � 1, j=k, δjk = 0 , j �= k . 2.8.2 Der Drehimpulsoperator in der Quantenmechanik Klassisch ist der Drehimpuls gegeben durch � = �r × p� . L In der Quantenmechanik verwendet man hingegen den Drehimpulsoperator � � � = �r × −i � ∇ � L ∂ x ∂x ∂ = −i � y × ∂y . ∂ z ∂z Die Komponenten ausgedrückt in kartesischen Koordinaten sind dann � � ∂ ∂ −z Lx = −i � y , ∂z ∂y � � ∂ ∂ −x , Ly = −i � z ∂x ∂z 36 (2.81) 2.8. WEITERE BEGRIFFE Lz = −i � � � ∂ ∂ x −y . ∂y ∂x Durch Nachrechnen (siehe Übungen) bestätigt man die Vertauschungsrelationen [Lx , Ly ] = i � Lz , (2.82a) [Ly , Lz ] = i � Lx , (2.82b) [Lz , Lx ] = i � Ly . (2.82c) Wir werden den Drehimpulsoperator später bei der Diskussion dreidimensionaler Probleme benötigen. 37

![Teil II: Quantenmechanik 1 Die Wellenfunktion [Griffiths 1.1]](http://s1.studylibde.com/store/data/002959439_1-7465ce5c82bb16d1bd7047f6c3c99749-300x300.png)