6 Vektorräume und Komplexe Zahlen
Werbung

6 Vektorräume und Komplexe Zahlen
6.1 Vektorräume
Vektorräume sind in gewisser Weise Verallgemeinerungen der Zahlenmengen. So gibt es
in einem Vektorraum eine Addition mit Eigenschaften analog der für die reellen Zahlen.
Außerdem kann man Vektoren durch die Multiplikation mit reellen Zahlen stauchen oder
dehnen. Eine Multiplikation mit den von den reellen Zahlen gewohnten Eigenschaften gibt es
jedoch im allgemeinen nicht. Daher werden verschiedene Arten von Ersatz-Multiplikationen
(Zahlen mit Vektoren oder Vektoren mit Vektoren) betrachtet.
Vektoren erlauben vielfältige innermathematische Anwendungen wie in der Geometrie oder
Analysis, sowie auch außermathematische Anwendungen z. B. in der Mechanik. Je nach
Anwendung haben sie unterschiedliche Formen.
Ziel dieses Abschnittes ist einerseits die Wiederholung von Begriffen, welche von der Schule
her bekannt sein sollten, und eine allgemeinere Einordnung.
6.1.1 Zahlenkörper
Seien K eine Menge mit einer Addition „+“ und die Multiplikation „·“ mit folgenden
Eigenschaften:
∀x, y ∈ K : x + y = y + x
∀x, y ∈ K : x · y = y · x
∀x, y, z ∈ K : x + (y + z) = (x + y) + z
∀x, y, z ∈ K : x · (y · z) = (x · y) · z
∀x, y, z ∈ K : x · (y + z) = x · y + x · z
∀x ∈ K : x + 0 = x, 1 · x = x
∀x ∈ K : ∃=1 − x ∈ K : x + (−x) = 0
∀x ∈ K \ {0}∃=1 x−1 ∈ K : x−1 · x = 1)
(Kommutativgesetze)
(Assoziativgesetze)
(Distributivgesetz)
(neutrale Elemente 0 bzw. 1
(additiv inverse Zahl)
(multiplikativ inverse Zahl)
Definition 6.1. Eine Menge K mit Operationen + und · und Elementen 0 6= 1 und obigen
Gesetzen heißt (Zahlen-) Körper .
Bemerkung 6.2. Die Menge N der natürlichen Zahlen und die Menge der ganzen Zahlen
Z bilden mit der üblichen Addition und Multiplikation keinen Zahlenkörper, da Inverse
Elemente zu Addition bzw. Multiplikation fehlen.
105
6 Vektorräume und Komplexe Zahlen
Beispiel 6.3. Die Menge Q der rationalen Zahlen pq mit p, q ∈ Z, q 6= 0 ausgestatter mit
der üblichen Addition und der üblichen Multiplikation bildet einen Zahlenkörper, wobei
• rationale Zahlen
p
q
und
r
s
genau dann als gleich gelten, wenn ps = qr gilt,
p
r
=
q
s
⇐⇒
ps = qr ,
• rationale Zahlen pq und rs addiert werden, indem beide Zahlen auf den gemeinsamen
Hauptnenner gebarcht werden und dann die Zähler addiert werden,
p r
ps qr ps + qr
+ =
+ =
,
q s
qs qs
qs
• rationale Zahlen
den,
p
q
und
r
s
addiert werden, indem Zähler und Nenner multipliziert werpr
p r
· =
.
q s
qs
Beispiel 6.4. Die Menge R der reellen Zahlen ausgestattet mit der üblichen Addition und
der üblichen Multiplikation bildet einen Zahlenkörper, wobei mir den uns hier in der Vorlesung zur Verfügung stehenden Mitteln weder definiert werden kann, was reelle Zahlen
sind, noch wie sie addiert oder multipliziert werden. (Reelle Zahlen werden als Äquivalenzklassen von Intervallschachtelungen, als Dedekind-Schnitte, als Äquivalenzklassen von
Cauchy-Folgen eingeführt. Die Einführung reeller Zahlen als Dezimalbrüche mangelt daran,
dass Dezimalbrüche als formale Reihen betrachtet werden müssten und es sehr kompliziert
ist, für diese Addition und Multiplikation zu definieren.)
Beispiel 6.5. Sei M = {0, 1} mit folgender Addition und Multiplikation:
0+0=0,
0+1=1,
1+0=1,
1 + 1= 0 ,
0·0=0,
0·1=1,
1·0=1,
1 · 1= 1 .
Wir erhalten den zweielementigen Zahlenkörper F2 .
Beispiel 6.6. Die Menge Rn der reellen n-Tupel bildet für n > 1 zusammen mit der üblichen
komponentenweisen Addition keinen Zahlenkörper, da eine geeignete Multiplikation fehlt:
Zum Skalarprodukt fehlen Inverse, das Vektorprodukt im R3 ist nicht kommutativ.
Beispiel 6.7. Die Menge Rn×n der n-reihigen Matrizen bildet für n > 1 zusammen mit der
üblichen Matrizenaddition und -multiplikation keinen Zahlenkörper: Die Muliplikation ist
nicht kommutativ und es mangelt an der Existenz inverser Matrizen.
6.1.2 Vektorraum Rn
Sei n ∈ N>0 . Wir betrachten die Menge
· · × R} = {(x1 , . . . , xn ) | xi ∈ R}
\pst{}}Rn := Xni=1 R = |R × ·{z
n−mal
106
6.1 Vektorräume
der reellen n-Tupel .
In Rn definiert man die Addition von Elementen x = (x1 , . . . , xn ), y = (y1 , . . . , yn ) und
die Multiplikation mit einem Skalar (reeller Zahl) λ ∈ R durch
x + y := (x1 + y1 , . . . , xn + yn ) und λ · x := (λx1 , . . . , λxn ) .
x + y heißt Summe von x und y, λx heißt Vielfaches, konkret λ-Faches von x.
Insbesondere betrachtet man die Räume R2 und R3 der Paare bzw. Tripel reeller Zahlen zur
Beschreibung von Punkten in der Ebene oder im (drei-dimensionalen) Raum.
Algebraische Eigenschaften: Seien
0 := (0, . . . , 0)
(Null) ,
−x := (−x1 , . . . , −xn )
(entgegengesetztes Element) .
Dann gelten (für x, y, z ∈ Rn ,λ, µ ∈ R):
x+y =y+x,
λ · (x + y) = λ · x + λ · y ,
x+0=x,
(6.1)
(x + y) + z = x + (y + z) ,
x + (−x) = 0 ,
(λ + µ) · x = λ · x + µ · x ,
0·x=0,
1·x=x,
λ(µ · x) = (λµ) · x ,
(−1) · x = −x .
(6.2)
(6.3)
Wir setzen:
x − y := x + (−y) = (x1 − y1 , . . . , xn − yn ) .
Schreibweise: Wir schreiben ein n-Tupel (x1 , . . . , xn ) auch als so genannten Spaltenvektor . Beachte den Unterschied zum Zeilenvektor (ohne Kommas!):
x1
für n>1
(x1 , . . . , xn ) = ... 6= (x1
xn
···
xn ) .
Spezielle Vektoren sind der Nullvektor 0 = (0, . . . , 0) und die i-ten Einheitsvektoren
ei := (0, . . . , 0, 1, 0, . . . , 0) ,
bei denen genau an der i-ten Stelle eine 1 steht.
Ist dann x = (x1 , . . . , xn ) ein Vektor aus Rn , so kann man ihn als
x = x1 e1 + x2 e2 + · · · + xn en =
n
X
xi ei ,
i=1
107
6 Vektorräume und Komplexe Zahlen
d. h., als eine Linearkombination der ei darstellen. Außerdem ist (e1 , . . . , en ) minimal
in folgendem Sinne: keiner der Vektoren ei lässt sich als Linearkombination der übrigen
Einheitsvektoren darstellen.
(e1 , . . . , en ) heißt kanonische Basis und x1 , . . . ,xn heißen die Koordinaten von x bezüglich der kanonischen Basis.
6.1.3 Allgemeine Vektorräume
Definition 6.8. Sei K ein Körper. Eine Menge V mit einer Addition + und einer Multiplikation · mit Zahlen aus K heißt Vektorraum, wenn genau ein Nullvektor 0 ∈ V und
für jedes x ∈ V genau ein additives Inverses (entgegengesetzter Vektor) −x ∈ V
existieren, so dass (6.1), (6.2), (6.3) für alle x, y, z ∈ V , λ, µ ∈ K gelten. Die Elemente eines
Vektorraumes heißen Vektoren.
Bemerkung 6.9. Ein Vektorraum ist also eine algebraische Struktur, in der Summe und
Vielfaches mit „vernünftigen“ Eigenschaften definiert sind.
Beispiele von Vektorräumen:
1. Der Raum Rn der reellen n-Tupel ist ein Vektorraum über dem Körper R, siehe oben.
2. Wir betrachten die Menge Rm×n der reellen m × n-Matrizen mit üblicher Summe und
üblichen reellen Vielfachen. Dann ist auch Rm×n ein Vektorraum
3. Wir betrachten die Lösungsmenge L ⊆ R eines linearen, homogenen Gleichungssystems
mit reellen Koeffizienten. Dann ist L ein reeller Vektorraum.
4. Wir betrachten die Lösungsmenge L ⊆ Q eines linearen, homogenen Gleichungssystems
mit rationalen Koeffizienten. Dann ist L ein rationaler Vektorraum.
5. Wir betrachten die Menge F aller Funktionen f : R → R. Für f, g ∈ F definieren wir
Summe und Vielfaches durch
(f + g)(x) := f (x) + g(x) ,
Damit bildet F einen Vektorraum über R.
108
(λf )(x) := λf (x)
(x ∈ R) .
6.1 Vektorräume
Definition 6.10. Seien n Vektoren b1 , . . . , bn in einem Vektorraum V über K gegeben.
Das n-Tupel (b1 , . . . , bn ) heißt linear unabhängig , wenn der Nullvektor 0 nur trivial als
Linearkombination der bi darstellbar ist:
λ 1 b1 + · · · + λ n bn = 0
⇒
λ1 = · · · = λn = 0 .
Das n-Tupel (b1 , . . . , bn ) heißt vollständig , wenn jeder Vektor v ∈ V als Linearkombination
der bi darstellbar ist:
∀v ∈ V ∃x1 , . . . , xn ∈ K : v = x1 b1 + x2 b2 + . . . + xn bn .
(6.4)
Ein linear unabhängiges und vollständiges n-Tupel (b1 , . . . , bn ) heißt Basis von V .
Bemerkung 6.11. Die Darstellung (6.4) bezüglich (b1 , . . . , bn ) ist eindeutig.
Definition 6.12. Ist (b1 , . . . , bn ) eine Basis, so heißt V ein n-dimensionaler Vektorraum.
Die Zahlen x1 , . . . , xn (in dieser Reihenfolge) in (6.4) heißen die Koordinaten von v bezüglich der Basis (b1 , . . . , bn ).
Der Vektor (x1 , . . . , xn ) ∈ Rn in (6.4) heißt Koordinatenvektor von v bezüglich dieser
Basis.
Existiert also eine Basis (b1 , . . . , bn ), so entspricht jedem Vektor v ∈ V genau ein Koordinatenvektor x ∈ Rn und umgekehrt, wobei
V ∋ v = x1 b1 + x2 b2 + · · · + xn bn
←→
(x1 , . . . , xn ) = x ∈ Rn .
Außerdem entsprechen sich Addition und Multiplikation mit Skalar in V und Rn .
Bemerkung 6.13. Anstelle eines n-dimensionalen Vektorraumes V über R kann stets der
isomorphe Vektorraum Rn der n-Tupel betrachtet werden.
6.1.4 Skalarprodukt und Norm
Definition 6.14. Für Vektoren x, y ∈ Rn definieren wir das euklidische Skalarprodukt
hx, yi := x1 y1 + · · · + xn yn =
n
X
xi yi = x⊤ y .
i=1
109
6 Vektorräume und Komplexe Zahlen
Das Skalarprodukt ordnet Vektoren x, y ∈ Rn eine reelle Zahl zu und hat folgende Eigenschaften (α, β ∈ R, x, y, z ∈ Rn ):
hx, yi = hy, xi
hx, αy + βzi = αhx, yi + βhx, zi
hx, xi ≥ 0 , hx, xi = 0⇔ x = 0
(Symmetrie)
(Bilinearität)
(positive Definitheit) .
(6.5)
Offensichtlich gilt
xi = hx, ei i für i = 1, . . . , n .
Definition 6.15. Eine Abbildung h·, ·i : V × V → R, (v, w) 7→ hv, wi heißt Skalarprodukt
in V , wenn (6.5) für alle α, β ∈ R und alle x, y ∈ V gilt.
Andere Bezeichnungen:
v·w,
(v | w) ,
(v, w) .
Definition 6.16. Die Zahl
kxk :=
p
q
hx, xi = x21 + · · · + x2n
heißt (euklidischer) Betrag , Länge oder euklidische Norm von x.
Die Länge hat folgende Eigenschaften (λ ∈ R, x, y ∈ Rn ):
kxk ≥ 0 , kxk = 0 ⇔ x = 0
kλxk = |λ| · kxk
kx + yk ≤ kxk + kyk
(positive Definitheit)
(Homogenität)
(Dreiecksungleichung)
(6.6)
Definition 6.17. Der Vektorraum (Rn , +, ·) ausgestattet mit der Länge k · k heißt euklidischer Raum.
Definition 6.18. Eine Abbildung k · k : V → R, v 7→ kvk heißt Norm in V , wenn (6.6)
entsprechend für alle λ ∈ R und alle x, y ∈ V gilt.
Definition 6.19. v ∈ V heißt normiert oder Einheitsvektor , wenn kvk = 1.
Bemerkung 6.20. Wenn h·, ·i ein Skalarprodukt in V ist, dann ist durch kvk :=
v ∈ V eine Norm in V definiert.
110
p
hv, vi für
6.1 Vektorräume
Es gilt die Cauchy-Schwarz-Bunjakowski-Ungleichung
für allev, w ∈ V .
|hv, wi| ≤ kvk · kwk
Sei (b1 , . . . , bn ) eine Basis in V und seien v, w ∈ V mit
v=
n
X
w=
xi bi ,
i=1
Dann gilt
hv, wi =
n X
n
X
n
X
y i bi .
i=1
mit
gij xi yj
i=1 j=1
gij := hbi , bj i .
Definition 6.21. Zwei Vektoren a, b ∈ V heißen orthogonal zueinander , wenn
ha, bi = 0
gilt.
Wenn hbi , bi i = 1, hbi , bj i = 0 für i 6= j, dann sind die Vektoren b1 , . . . , bn normiert und
paarweise orthogonal (d. h., orthonormal ) und es gilt gii = 1 und gij = 0 für i 6= j. Daher
gilt dann
n
X
hv, wi =
xi yi .
i=1
Bemerkung 6.22. Die Einheitsvektoren e1 , . . . , en in Rn sind orthonormal bezüglich des
euklidischen Skalarproduktes.
Definition 6.23. Für zwei Vektoren v, w ∈ V \ {0} eines euklidischen Raumes V wird der
Winkel ∡(v, w) ∈ [0, π] definiert durch
cos ∡(v, w) =
hv, wi
.
kvk · kwk
Bemerkung 6.24. Durch obige Defintion wird der Winkelbegriff vom Zweidimensionalen her
verallgemeinert und ist nun auch allgemein in euklidischen Vektorräumen verfügbar.
Bemerkung 6.25. Zwei Vektoren v, w ∈ V \{0} sind genau dann orthogonal zueinander (d. h.
hv, wi = 0), wenn der Winkel zwischen ihnen π2 (also 90◦ ) ist.
111
6 Vektorräume und Komplexe Zahlen
6.1.5 Analytische Geometrie
Aus der Schule sollte die Anwendung des R2 und des R3 für die analytische Geometrie,
Grundaufgaben der analytischen Geometrie und deren Lösung bekannt sein:
• Darstellungen von Geraden und Ebenen,
• Orthogonalprojektion,
• Schnittpunkte von Geraden und Ebenen,
• Winkel zwischen Geraden und Ebenen,
• Lotfußpunkte und Lotgeraden.
Zum Skalarprodukt kommen im R3 noch Kreuzprodukt und Spatprodukt hinzu. Für eine
ausführlichere Darstellung der analytischen Geometrie wird auf andere Vorlesungen bzw.
Bücher verwiesen.
6.2 Komplexe Zahlen
Ziel ist, die Menge R2 so mit einer Addition „+“ und einer Multiplikation „·“ auszustatten,
dass ein Zahlenkörper entsteht.
Wenn dies geht, so können wir mit Punkten in der Ebene R2 richtig rechnen – im Unterschied
zur Vektorrechnung, bei der eine Division fehlt.
6.2.1 Körper der komplexen Zahlen
Wir vewenden für den R2 die schon bekannte Addition
(a, b) + (c, d) := (a + c, b + d) .
(6.7)
Sie erfüllt alle an sie forderten Eigenschaften für einen Zahlenkörper.
Beispiel 6.26. Es seien z1 = (2, −1), z2 = (1, 3). Dann gelten
z1 + z2 =(2, −1) + (1, 3) = (3, 2) ,
z1 − z2 =(2, −1) − (1, 3) = (1, −4) .
Benötigt wird noch Multiplikation im R2 , d. h., wir haben
(a, b) · (c, d)
so zu definieren, dass wieder ein Element des R2 entsteht, und so, dass das Produkt vernünftige Eigenschaften hat (Kommutativgesetz, Assoziativgesetz, Distributivgesetz, Existenz von
neutralem Element und von inversen Elementen).
112
6.2 Komplexe Zahlen
Insbesondere wollen wir ein Paar (x, 0) ∈ R2 mit der reellen Zahl x ∈ R identifizieren:
(x, 0) = x
für x ∈ R .
Außerdem soll die Multiplikation mit einer reellen Zahl die schon vom R2 bekannten Eigenschaften haben.
Damit sind schon festgelegt:
• 0 = (0, 0) als Null und 1 = (1, 0) als Eins,
• (a, 0) · (c, d) = (ac, ad) und somit
(a, b) · (c, d) = (a, 0) · (c, d) + (0, b) · (c, d)
= (a, 0) · (c, 0) + (a, 0) · (0, d) + (0, b) · (c, 0) + (0, b) · (0, d)
= ac(1, 0)2 + ad(1, 0)(0, 1) + bc(1, 0)(0, 1) + bd(0, 1)2
= ac(1, 0) + (bc + ad)(0, 1) + bd(0, 1)2
= (ac, ad + bc) + bd(0, 1)2 .
Offen ist somit nur noch die geeignete Definition von
(0, 1)2 .
Potentielle (einfachste) Elemente wären
(0, 0) ,
(1, 0) ,
(0, 1) ,
(−1, 0) ,
(0, −1) ,
(1, 1) ,
(−1, −1) ,
wovon aber nur (−1, 0) die gewünschten Eigenschaften hat:
Setzen wir
(0, 1)2 := (−1, 0) = −1 ,
so haben wir die Multiplikation vollständig definiert durch
(a, b) · (c, d) := (ac − bd, ad + bc) .
(6.8)
Die so definierte Multiplikation hat vernünftige Eigenschaften:
• Sie genügt dem Kommutativ- und dem Assoziativgesetz.
• Gemeinsam mit der Addition genügt sie dem Distributivgesetz.
• 0 = (0, 0) und 1 = (1, 0) sind die neutralen Elemente bezüglich Addition bzw. Multiplikation.
113
6 Vektorräume und Komplexe Zahlen
• Für jedes (a, b) 6= (0, 0) gilt
a
−b
(a, b) ·
= (1, 0) = 1 ,
,
a2 + b2 a2 + b2
wenn (a, b) 6= 0 ,
genauer: (a, b) 6= (0, 0) gibt es genau ein (c, d) mit (a, b) · (c, d) = 1.
Beispiel 6.27. Es seien z1 = (2, −1), z2 = (1, 3). Dann gelten
z1 · z2 =(2 · 1 − (−1) · (3), 2 · 3 + (−1) · 1) = (5, 5) ,
1
2 1
−(−1)
2
= 2
,
,
=
.
z1
2 + (−1)2 22 + (−1)2
5 5
Satz 6.28. Die Menge R2 zusammen mit der Addition + und der Multiplikation · entsprechend (6.7) und (6.8) bildet einen Zahlenkörper.
Definition 6.29. Die Menge R2 zusammen mit der Addition + und der Multiplikation ·
entsprechend (6.7) und (6.8) heißt Körper der komplexen Zahlen C. Die Elemente von
C heißen komplexe Zahlen C.
6.2.2 Algebraische Darstellung komplexer Zahlen
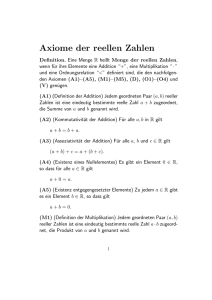
Bemerkung 6.30. C ist ein zweidimensionaler Vektorraum über R mit der Basis
(e1 , e2 ) = ((1, 0), (0, 1)) ,
d. h., für jede komplexe Zahl (x, y) gilt
(x, y) = x · (1, 0) + x · (0, 1) = x · e1 + y · e2 .
(6.9)
(x, y) = x · e1 + y · e2
y · e2
e2
e1
x · e1
Wir können uns daher die Elemente von C auch als Punkte in der Ebene vorstellen, nachdem
wir einen Nullpunkt und zwei aufeinander senkrecht stehende Koordinatenachsen ausgewählt
haben: Die waagerechte Achse gehört zum Basisvektor e1 = (1, 0), d. h., zu den reellen Zahlen, die vertikale Achse gehört zum Basisvektor e2 = (0, 1). Komplexe Zahlen können auch
114
6.2 Komplexe Zahlen
als Zeiger (Ortsvektoren) in der Ebene, Gaußsche Zahlenebene genannt, interpretiert
werden.
Bemerkung 6.31. Addition der komplexen Zahlen (a, b) und (c, d) heißt Verschiebung des
Punktes (a, b) um den Vektor (c, d) in den Punkt (a + c, b + d).
Wir haben schon
1 = e1 = (1, 0) .
Wir setzen
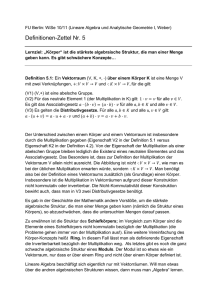
i := e2 = (0, 1) .
Wegen (6.9) haben wir damit
(x, y) = x + iy .
(x, y) = x + yi
yi
i
1
x
Wir können uns daher nun die Elemente von C als Punkte in der Ebene vorstellen, nachdem
wir einen Nullpunkt und zwei aufeinander senkrecht stehende Koordinatenachsen ausgewählt
haben: Die waagerechte, reelle Achse gehört zum Basisvektor 1 = (1, 0), d. h., zu den reellen
Zahlen, die vertikale, imaginäre Achse gehört zum Basisvektor i = (0, 1).
Definition 6.32. Für eine komplexe Zahl z = x + yi nennen wir y := Re(z) den Realteil
und y := Im(z) den Imaginärteil von z.
Für die Multiplikation gilt nun
(a + bi)(c + di) = ac − bd + (ad + bc)i .
Beispiel 6.33. Es gelten
(2 + 3i) · (3 − 4i)= 2 · 3 − 3 · (−4) + (2 · (−4) + 3 · 3)i= 18 + 1i ,
(0 + 1i) · (0 + 1i)= 0 · 0 − 1 · 1 + (0 · 1 + 1 · 0)i= −1 .
Insbesondere haben wir
115
6 Vektorräume und Komplexe Zahlen
i2 = i · i = −1 = (−i) · (−i) = (−i)2 .
Damit hat die Gleichung x2 = −1 in C zwei Lösungen!
Da C ein Zahlenkörper ist, kann man mit komplexen Zahlen im Sinne von Addition und
Subtraktion, Multiplikation und Division genau so rechnen wie mit reellen Zahlen. Beachtet
man i2 = −1, so wird einfach ausmultipliziert.
Beispiel 6.34. Es gelten
(2 + 3i) · (3 − 4i)= 2 · 3 + 2 · (−4i) + 3i3 + 3i · (−4i)= 6 − 8i + 9i − 12i2 = 18 + 1i ,
(3 + 4i)(2 − i) = 6 − 3i + 8i − 4i2 = 10 + 5i.
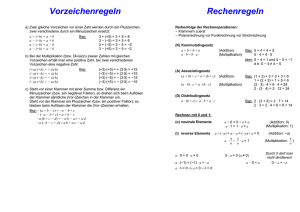
Definition 6.35. Die komplexen Zahlen z = x + iy und z̄ := x − iy, die gleichen Realteil
und zueinander negativen Imaginärteil haben, heißen komplex konjugiert zueinander.
z = x + iy
y
z+z
x
z = x − iy
Bemerkung 6.36. Das Konjugieren einer komplexen Zahl z = x + iy zu z̄ := x − iy ist das
Spiegeln des Punktes (x, y) an der reellen Achse.
Bemerkung 6.37. Das Produkt zweier zueinander konjugiert komplexer Zahlen ist eine reelle
Zahl:
z · z̄ = (x + iy) · (x − iy) = x2 + ixy − ixy − i2 y 2 = x2 + y 2 .
Dies wird ausgenutzt zum Reellmachen des Nenners und zur Division komplexer Zahlen:
a + ib
a + ib c − id
ac + bd + (bc − ad)i
ac + bd bc − ad
=
·
=
= 2
+ 2
i.
2
2
c + id
c + id c − id
c +d
c + d2
c + d2
Beispiel 6.38. Es gilt
6 + 3i + 8i + 4i2
3 + 4i 2 + i
3 + 4i
2 + 11i
2 11
=
·
=
=
= + i.
2
2−i
2−i 2+i
4 + 2i − 2i − i
4+1
5
5
116
6.2 Komplexe Zahlen
Für Elemente des R2 kennen wir schon den Betrag.
Definition 6.39. Für eine komplexe Zahl z = x + iy wird der Betrag einer komplexen Zahl
|z| definiert durch
p
√
|z| := |x + iy| = x2 + y 2 = zz .
Wir notieren noch die folgenden Rechenregeln:
z1 · z2 = z1 · z 2 ,
|z| = |z| ,
z1 + z2 = z 1 + z 2 ,
|z1 z2 | = |z1 | · |z2 | ,
Re(z) =
1
2 (z
+ z) ,
z=z,
z · z = |z|2
|z1 + z2 | ≤ |z1 | + |z2 | ,
Im(z) =
1
2i (z
− z) .
Beachte: Die letzten beiden Formeln lassen sich in der Gaußschen Zahlenebene gut verstehen. Zu einer komplexen Zahl z erhält man die komplex Konjugierte nämlich (nach Definition) einfach durch Spiegelung an der reellen Achse. Insbesondere gelten auch
z −1 =
z
1
= 2z ,
z·z
|z|
w · z̄
w
,
=
z
|z|2
Beispiel 6.40. Es seien z1 = 2 − i, z2 = 1 + 3i, vergleiche die Beispiele 6.26, 6.27. Dann
gelten
z1 + z2 = 3 + 2i ,
z̄1 = 2 + i ,
p
√
|z1 | = 22 + (−1)2 = 5 ,
z1 · z2 = 2 + 6i − i + 3 = 5 + 5i
z1 − z2 = 1 − 4i ,
z̄2 = 1 − 3i ,
p
√
|z2 | = 12 + 32 = 10 ,
z1
(2 − i)(1 − 3i)
2 − 6i − i − 3
√
√
=
=
z2
10
10
√
√
−1 − 7i
10 7 10
=−
−
i.
= √
10
10
10
Bemerkung 6.41. Im Unterschied zu den reellen Zahlen haben wir keine Ordnungsrelation
mit den vom Reellen bekannten Eigenschaften.
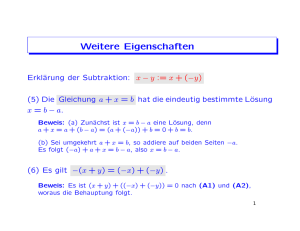
6.2.3 Polardarstellung
Betrachtet man eine komplexe Zahl z 6= 0 als Zeiger in der komplexen Zahlenebene, so kann
z offenbar auch in folgender Form dargestellt werden:
z = |z| cos ϕ + i|z| sin ϕ = |z|(cos ϕ + i sin ϕ) ,
wobei ϕ = arg(z) ein Winkel sei, den der Zeiger mit der reellen Achse bildet.
117
6 Vektorräume und Komplexe Zahlen
(x, y) = x + yi
yi
r
i
ϕ
1
x
Dieser Winkel wird Argument von z genannt. Üblicherweise wird für eine eindeutige Darstellung der Hauptwert des Winkels im Intervall ] − π, π] gesucht, d. h.,
Arg(z) ∈ ] − π, π] .
Für z = x + iy setzen wir
Arg(z) := ϕ
x
mit cos ϕ =
|z|
und
0 ≤ ϕ ≤ π, falls y ≥ 0
−π < ϕ < 0, falls y < 0
,
wenn z 6= 0. Weiter sei Arg(0) := 0.
Zusammengefasst haben wir die eindeutige trigonometrische Form oder Polardarstellung einer komplexen Zahl z mit
z = |z| (cos Arg(z) + i sin Arg(z)) ,
wobei sich ein beliebiges Argument ϕ von z von Arg(z) nur durch Vielfache von 2π unterscheidet.
6.2.4 Komplexe Sinus-, Cosinus- und Exponential-Funktionen
Ein Vorteil der komplexen Zahlen besteht darin, dass man bestimmte reelle Funktionen unter Erhaltung ihrer wichtigsten Eigenschaften auf C erweitern kann. Außer den (natürlichen)
Potenzfunktionen und damit den Polynomen sind dies die Exponential- und Hyperbelfunktionen sowie die trigonometrischen Funktionen:
exp : C → C ,
sin : C → C ,
sinh : C → C ,
exp z := ez := eRe(z) (cos Im(z) + i sin Im(z)) ,
1 iz
1 iz
e − e−iz , cos : C → C , cos z :=
e + e−iz ,
sin z :=
2i
2
1 z
1 z
−z
sinh z :=
, cosh : C → C , cosh z :=
e −e
e + e−z .
2
2
Diese Funktionen erfüllen die aus dem Reellen bekannten Additionstheoreme. Insbesondere
gelten
118
6.2 Komplexe Zahlen
ez1 +z2 = ez1 ez2 ,
e−z =
1
,
ez
enz = (ez )n .
Für z = iy mit y ∈ R erhalten wir die Euler-Formel bzw. Moivre-Formel
eiy = cos y + i sin y ,
einy = (cos y + i sin y)n = cos ny + i sin ny .
Die Moivre-Formel ermöglicht zum Beispiel die Berechnung von cos 3ϕ:
cos 3ϕ = Re (cos ϕ + i sin ϕ)3
= Re cos3 ϕ + 3 · cos2 ϕ · i sin ϕ + 3 · cos ϕ · i2 sin2 ϕ + i3 sin3 ϕ
= cos3 ϕ − 3 cos ϕ sin2 ϕ .
6.2.5 Exponential-Darstellung
Aus der Polardarstellung
z = |z| (cos Arg(z) + i sin Arg(z))
und der Euler-Formel erhalten wir nun die Exponentialdarstellung
z = |z|eiArg(z) .
Die komplexen Zahlen z und w werden multipliziert, indem ihre Beträge multipliziert und
ihre Argumente addiert werden:
z · w = |z|eiArg(z) · |w|eiArg(w) = |z||w|ei(Arg(z)+Arg(w)) .
Bemerkung 6.42. Multiplikation der komplexen Zahlen z und w heißt also Dehnen des
Vektors z = (x, y) um den Betrag |w| und Drehen um den Nullpunkt um den Winkel
Arg(w) .
Bemerkung 6.43. Die Multiplikation mit der komplexen Zahlen eiϕ ist das Drehen um den
Nullpunkt mit dem Winkel ϕ.
Zwei komplexe Zahlen z und w 6= 0 werden dividiert, indem ihre Beträge dividiert und
ihre Argumente subtrahiert werden:
z
|z| i(Arg(z)−Arg(w))
|z|eiArg(z)
=
=
e
.
iArg(w)
w
|w|
|w|e
119
6 Vektorräume und Komplexe Zahlen
Eine komplexe Zahl z wird potenziert, indem ihr Betrag potenziert und ihr Argument
n
vervielfacht wird:
= |z|n einArg(z) .
z n = |z|eiArg(z)
√
√ 3π
π
2ei 4 und i − 1 = 2ei 4 gilt
√ 12
√ π 5 √ 3 7
π
3
2ei 4 ·
2ei 4 π
2
· ei(5· 4 +7· 4 π)
=
(1 + i)5 · (i − 1)7 =
Beispiel 6.44. Wegen 1 + i =
1
26
= 26 · ei 4 π = 64 · ei(6π+ 2 π) = 64ei 2 = 64i .
π
Bemerkung 6.45. Während die algebraische Darstellung sehr gut geeignet ist für die Addition
und Subtraktion, ist die Exponentialdarstellung besser geeignet für Multiplikation, Division
und Potenzierung.
6.2.6 Komplexe Faktorisierung eines Polynoms
Wir betrachten eine quadratische Gleichung
x2 + px + q = 0
im Fall D =
Seien
p2
4
(6.10)
− q < 0, d. h., in dem Fall, indem keine reelle Lösung existiert.
√
p
x1 := − − i −D ,
2
√
p
x2 := − + i −D .
2
Dann gilt
√
√
p
p
(x − x1 )(x − x2 ) = [x + ] − i −D [x + ] + i −D
2
2
p 2
p 2 p2
= (x + ) − i2 (−D) = x2 + px +
−
+q
2
4
4
= x2 + px + q .
Damit sind obige x1 und x2 komplexe Lösungen der Gleichung (6.10) im Falle
p2
4
− q < 0.
Insbesondere hat also jede quadratische Gleichung (6.10) mit reellen Koeffizienten genau
zwei Lösungen.
Man kann zeigen:
Satz 6.46 (Fundamentalsatz der Algebra). Lässt man auch komplexe Nullstellen zu, so
besitzt jedes Polynom eine Faktorisierung nur in Linearfaktoren. Insbesondere hat jedes Polynom n-ten Grades, n ≥ 1, genau n komplexe Nullstellen, wenn mehrfache Nullstellen
entsprechend oft gezählt werden.
Beispiel 6.47. x2 + 1 = (x + i)(x − i) .
120
6.2 Komplexe Zahlen
6.2.7 n-te Wurzeln in C
Wir suchen die (reellen und) komplexen Nullstellen des Polynoms f (x) = xn − 1, also die
Wurzeln der Gleichung xn = 1. Nach dem Fundamentalsatz der Algebra wissen wir, dass f
genau n komplexe Nullstellen besitzt (Vielfachheiten mitgezählt). Über die Exponentialdarstellung können wir unmittelbar n Lösungen der Gleichung angeben. Wegen eik·2π = 1 für
beliebiges k ∈ Z sind (die voneinander verschiedenen komplexen Zahlen)
k
xk := ei n ·2π ,
k = 0, 1, 2, . . . , n − 1
genau n Lösungen der Gleichung, mithin die n komplexen Nullstellen von f (x) = xn − 1.
Wir erweitern die Überlegung auf die Gleichung
zn = a ,
mit a ∈ C vorgegeben.
Sei etwa a = |a| · eiArg(a) . Dann sind die Zahlen
p
n
|a| · ei
Arg(a)+2kπ
n
,
k = 0, 1, 2, . . . , n − 1
genau die n Wurzeln (Lösungen) der Gleichung z n = a.
Damit können wir Gleichungen der Form
(z − a)n + b = 0
a, b ∈ C, n ∈ N>0
in C lösen.
Beispiel 6.48. Wir bestimmen alle Lösungen der Gleichung (z − 2i)3 − 64 = 0 in algebraischer Form: Mit w = z − 2i haben wir w3 = 64 und damit
√
√
2π
2π
w1 = 4 , w2 = 4e 3 i = −2 + 2 3i , w3 = 4e− 3 i = −2 − 2 3i
bzw.
2kπ
2kπ
wk = 4 cos
+ i sin
,
3
3
k = 0, 1, 2 .
Somit sind
z1 = 4 + 2i ,
√
z2 = −2 + 2( 3 + 1)i ,
√
z3 = −2 − 2( 3 − 1)i
die gesuchten Lösungen.
Beispiel 6.49. Wir bestimmen alle Lösungen der Gleichung
(z − 2)3 +
q√
√
algebraischer Form: S ei w = z − 2. Dann gilt |w| = 3 | 8| = 2 und
√
8 = 0 für z ∈ C in
√
1
2kπ
π 2kπ
arg w = arg(− 8) +
= +
,
3
3
3
3
121
6 Vektorräume und Komplexe Zahlen
woraus
√
√
√
π
π
2
6
+i
,
z0 = 2 + 2 cos + i 2 sin = 2 +
3
3
2
2
√
√
π 2π
π 2π
) + i 2 sin( +
)=2−
z1 = 2 + 2 cos( +
3
3
3
3
√
√
π 4π
π 4π
z2 = 2 + 2 cos( +
) + i 2 sin( +
)=2+
3
3
3
3
√
√
2
,
√2
√
2
6
−i
2
2
folgt.
6.2.8 Geometrische Anwendungen
Da C bzw. R2 mit der geometrischen Ebene identifiziert werden kann, können wir die geometrischen Anwendungen der Vektoranalysis wie Projektion, Schnitt von Geraden, Lot auf eine
Gerade und Winkel zwischen Geraden auch mit Hilfe der komplexen Zahlen durchführen.
Wir müssen hierzu nur noch
hz, wi = Re z · Re w + Im z · Im w = Re(zw) = Re(zw)
für das (reelle) Skalarprodukt der Vektoren z, w und
det(z, w) = Re z · Im w − Im z · Re w = Im(zw)
für die Determinante der Vektoren z, w bemerken.
Hinzu kommen aber zusätzliche Anwendungen, die sich aus der Anwendung der Multiplikation und des komplex Konjugiertem ergeben.
Beispiel 6.50. Eine Gerade g durch die Punkte z0 und z1 gegeben durch
g = {z0 + t · (z1 − z0 ) | t ∈ R} .
Eine Gerade g durch den Punkt z0 in Richtung r ist gegeben durch
g = {z0 + t · r) | t ∈ R} = {z ∈ C | hz, rii = hz0 , rii}
= {z ∈ C | Re(zr̄i) = Re(z0 r̄ii} = {z ∈ C | Im(zr̄) = Im(z0 r̄i}
Lemma 6.51. Es seien g und h zwei Geraden durch die Punkte a ∈ C und b ∈ C mit den
Richtungen p ∈ C bzw. q ∈ C.
1. Wenn hp, qii = 0 gilt (d. h. wenn Im(pq̄) = 0 gilt), dann sind g und h parallel.
2. Wenn hp, qii =
6 0 gilt, dann sind g und h nicht parallel und ihr Schnittpunkt s ist gegeben
durch
ha, qiip − hb, piiq
Im(aq̄ip − Im(bp̄)q
s=
=
.
hp, qii
Im(pq̄i
122
6.2 Komplexe Zahlen
Beispiel 6.52. Eine Kreislinie K mit Radius R und Mittelpunkt z0 ist gegeben durch
K = {z ∈ C | |z − z0 | = R} .
Mit z = x + iy, z0 = x0 + iy0 entspricht dies
{(x, y) ∈ R2 : (x − x0 )2 + (y − y0 )2 = R2 } .
Der Schnitt eines Kreises mit einer Geraden führt zu einer quadratischen Gleichung für eine
reelle Unbekannte.
Beispiel 6.53. Die obere Halbebene ist gegeben durch
{z | Imz ≥ 0} .
Die rechte Halbebene ist gegeben durch
{z | Rez ≥ 0} .
Beispiel 6.54. Die Menge
{z | |z + 2 − i| > 2}
stellt das Äußere eines Kreises um −2 + i mit dem Radius 2 dar.
Multiplizieren wir eine komplexe Zahl z mit eiϕ , ϕ ∈ R, so wird ϕ zum Argument von z
addiert, der Betrag ändert sich aber nicht:
|zeiϕ | = |zeiArg(z) eiϕ | = |z||ei(Arg(z)+ϕ | = |z|| cos(Arg(z) + ϕ) + i sin(Arg(z) + ϕ)|
q
= |z| cos2 (Arg(z) + ϕ) + sin2 (Arg(z) + ϕ) = |z| .
Die Multiplikation mit eiϕ bewirkt also eine Drehung um 0 mit dem Winkel ϕ.
Die Multiplikation mit eiπ/2 = i ist also eine Drehung um 0 mit dem Winkel 90◦ .Betrachten
wir nun die Spiegelung an der reellen Achse. Diese ist durch
z = Rez + iImz 7→ Rez − iImz = z
gegeben.
Als dritte elementare Kongruenztransformation fehlt uns nur noch die Verschiebung um
|a| in Richtung eiArg(a) :
z 7→ z + a .
Eine beliebige Kongruenztransformation in der Ebene setzt sich stets aus Drehung um
0, Spiegelung an der reellen Achse und Verschiebung zusammen.
123
6 Vektorräume und Komplexe Zahlen
Beispiel 6.55. Eine Spiegelung an einer Geraden
g = {a + teiα | t ∈ R} , α ∈ R
durch den Punkt a erhält man in folgender Weise:
Zuerst verschieben wir die Gerade g so, dass ihr Bild durch den Nullpunkt verläuft,
z 7→ z − a ,
dann drehen wir um den Winkel −α, so dass das Bild der Gerade nun mit der reellen Achse
zusammenfällt,
z 7→ ze−iα ,
dann wird an der reellen Achse gespiegelt,
z 7→ z ,
und schließlich wieder zurück gedreht und zurück verschoben:
z 7→ zeiα ,
z 7→ z + a .
Insgesamt erhalten wir durch Verkettung dieser fünf Abbildungen die Spiegelung an g durch
z 7→ (z − a)e−iα eiα + a = (z − a) e−iα eiα + a = (z − a)e2iα + a .
Bemerkung 6.56. Im Unterschied zur analytischen Geometrie haben wir hier zusätzliche
Möglichkeiten z. B. durch Verwendung der Division, der Multiplikation mit eiϕ zur Drehung
um ϕ, der Spiegelung an der reellen Achse (durch komplexes Konjugieren) und durch Verwendung n-ter Einheitswurzeln zur Konstruktion von regulären n-Ecken. Andererseits kann
dies so nur auf ebene Geometrie angewandt werden.
Bemerkung 6.57. Komplexe Zahlen finden außer in der ebenen Geometrie und bei Nullstellen
von Polynomen weitere Anwendungen in Algebra und Analysis, die in vielen Fällen die
Theorie durch Nutzung komplexer Zahlen einfacher wird.
124
Inhaltsverzeichnis
1 Mengen und Funktionen
1.1 Grundlagen . . . . . . . . . . . . . . . . . . . . . . . .
1.1.1 Logik . . . . . . . . . . . . . . . . . . . . . . .
1.1.2 Äquivalenz von aussagenlogischen Ausdrücken .
1.1.3 Prädikative Ausdrücke, Quantifikatoren . . . .
1.1.4 Mengen . . . . . . . . . . . . . . . . . . . . . .
1.1.5 Teilmengen . . . . . . . . . . . . . . . . . . . .
1.1.6 Leere Menge . . . . . . . . . . . . . . . . . . .
1.1.7 Potenzmengen . . . . . . . . . . . . . . . . . .
1.2 Mengenalgebra . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Komplement . . . . . . . . . . . . . . . . . . .
1.2.2 Regeln für das Rechnen mit Mengen . . . . . .
1.2.3 Mengenfamilien . . . . . . . . . . . . . . . . . .
1.3 Kartesisches Produkt und Relationen . . . . . . . . . .
1.4 Abbildungen und Funktionen . . . . . . . . . . . . . .
1.4.1 Abbildungsbegriff . . . . . . . . . . . . . . . . .
1.4.2 Verkettung von Funktionen . . . . . . . . . . .
1.4.3 Umkehrabbildung . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2 Zahlen
2.1 Natürliche Zahlen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.1 Menge der natürlichen Zahlen . . . . . . . . . . . . . . . . . . . . . . .
2.1.2 Induktionsprinzip . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1.3 Prinzip der rekursiven Definition . . . . . . . . . . . . . . . . . . . . .
2.2 Kombinatorik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.1 Permutationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.1.1 Anordnung ohne Wiederholung . . . . . . . . . . . . . . . . .
2.2.1.2 Anordnung mit Wiederholung . . . . . . . . . . . . . . . . .
2.2.2 Variationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.2.1 Auswahl mit Beachtung der Reihenfolge und ohne Wiederholung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.2.2 Auswahl mit Beachtung der Reihenfolge und mit Wiederholung
2.2.3 Kombinationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.3.1 Auswahl ohne Beachtung der Reihenfolge und ohne Wiederholung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.3.2 Auswahl ohne Beachtung der Reihenfolge und mit Wiederholung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.4 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
5
5
6
6
7
9
9
10
11
12
12
13
14
15
15
18
20
25
25
25
25
26
26
26
26
27
28
28
29
29
29
31
31
125
Inhaltsverzeichnis
2.3
2.4
2.5
Rationale und Reelle Zahlen . . . . . . . . . . . . . . . . . . . . . . .
2.3.1 Weitere Zahlenbereiche . . . . . . . . . . . . . . . . . . . . .
2.3.2 Gemeinsame Eigenschaften der rationalen und reellen Zahlen
2.3.2.1 Algebraische Eigenschaften . . . . . . . . . . . . . .
2.3.2.2 Ordnungseigenschaften . . . . . . . . . . . . . . . .
2.3.3 Unterschiede der rationalen und reellen Zahlen . . . . . . . .
Rechnen mit Gleichungen und Ungleichungen . . . . . . . . . . . . .
2.4.1 Äquivalente Umformungen . . . . . . . . . . . . . . . . . . .
2.4.2 Rechnen mit Beträgen . . . . . . . . . . . . . . . . . . . . . .
Weitere Definitionen und Aussagen . . . . . . . . . . . . . . . . . . .
2.5.1 Summen und Produkte . . . . . . . . . . . . . . . . . . . . .
2.5.2 Potenzen und Wurzeln . . . . . . . . . . . . . . . . . . . . . .
2.5.3 Logarithmen . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
31
31
32
32
32
33
34
34
35
36
36
37
38
3 Matrizen und Determinanten
3.1 Matrizen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1.1 Matrizen und Gleichungssysteme . . . . . . . . . . . . . . .
3.1.2 Spezielle Matrizen . . . . . . . . . . . . . . . . . . . . . . .
3.1.3 Addition und Subtraktion von Matrizen . . . . . . . . . . .
3.1.4 Multiplikation mit einer reellen Zahl (Skalar) . . . . . . . .
3.1.5 Multiplikation von Matrizen . . . . . . . . . . . . . . . . . .
3.1.6 Lineare Gleichungssysteme in Matrizen-Darstellung . . . . .
3.1.7 Die inverse Matrix . . . . . . . . . . . . . . . . . . . . . . .
3.2 Determinanten . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.1 Der Begriff der Determinante . . . . . . . . . . . . . . . . .
3.2.2 Das Rechnen mit Determinanten . . . . . . . . . . . . . . .
3.2.3 Anwendungen auf lineare Gleichungssysteme im Fall m = n
3.3 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
39
39
39
43
45
46
47
49
50
51
51
53
55
58
4 Das Austauschverfahren
4.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Das Austauschverfahren als Algorithmus . . . . . . . . . . . . . .
4.2.1 Vorbereitung . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.2 Theoretische Durchführung des ersten Austauschschrittes
4.2.3 Praktische Durchführung des ersten Austauschschrittes .
4.2.4 Fortsetzung des Austauschverfahrens . . . . . . . . . . . .
4.3 Anwendungen des Austauschverfahrens (AV) . . . . . . . . . . .
4.3.1 Inversion von Matrizen . . . . . . . . . . . . . . . . . . . .
4.3.2 Lösung Linearer Gleichungssysteme . . . . . . . . . . . .
4.3.3 Berechnung von Determinanten . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
59
59
61
61
62
63
65
68
68
72
79
.
.
.
.
.
.
.
.
.
.
5 Lineare Optimierung
81
5.1 Lineare Optimierungsprobleme . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.2 Normalform der linearen Optimierung . . . . . . . . . . . . . . . . . . . . . . 86
5.2.1 Die Normalform . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
126
Inhaltsverzeichnis
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
86
88
88
92
93
95
100
6 Vektorräume und Komplexe Zahlen
6.1 Vektorräume . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1.1 Zahlenkörper . . . . . . . . . . . . . . . . . . . . . . . .
6.1.2 Vektorraum Rn . . . . . . . . . . . . . . . . . . . . . .
6.1.3 Allgemeine Vektorräume . . . . . . . . . . . . . . . . . .
6.1.4 Skalarprodukt und Norm . . . . . . . . . . . . . . . . .
6.1.5 Analytische Geometrie . . . . . . . . . . . . . . . . . . .
6.2 Komplexe Zahlen . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2.1 Körper der komplexen Zahlen . . . . . . . . . . . . . . .
6.2.2 Algebraische Darstellung komplexer Zahlen . . . . . . .
6.2.3 Polardarstellung . . . . . . . . . . . . . . . . . . . . . .
6.2.4 Komplexe Sinus-, Cosinus- und Exponential-Funktionen
6.2.5 Exponential-Darstellung . . . . . . . . . . . . . . . . . .
6.2.6 Komplexe Faktorisierung eines Polynoms . . . . . . . .
6.2.7 n-te Wurzeln in C . . . . . . . . . . . . . . . . . . . . .
6.2.8 Geometrische Anwendungen . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
105
105
105
106
108
109
112
112
112
114
117
118
119
120
121
122
5.3
5.4
5.2.2 Überführung in die Normalform . . . . . . . .
Lösung einer Normalform der linearen Optimierung .
5.3.1 Bestimmung einer zulässigen Basisdarstellung
5.3.2 Simplextableau . . . . . . . . . . . . . . . . .
5.3.3 Optimalität und Simplexkriterium . . . . . .
5.3.4 Bestimmung des Minimums . . . . . . . . . .
Ermittlung eines ersten Simplextableaus . . . . . . .
. . . . .
. . . . .
von (G)
. . . . .
. . . . .
. . . . .
. . . . .
127
Inhaltsverzeichnis
128
Index
Äquivalenz, 5
Äquivalenzrelation, 14
äquivalent, 6
Abbildung, 14, 16
Abbildung, affin-lineare, 60
Abbildung, identische, 20
Abbildung, lineare, 59
Abbildung, surjektive, 18
Addition, 32, 105, 107, 109
Addition, komplexe, 112
Additionstheorem, 118
All-Quator, 7
Antisymmetrie, 33
Argument, 17, 118–120
Argument, 123
Assoziativgesetz, 6, 12, 32, 105, 112, 113
Aussage, 5
Aussageform, 5
Aussagevariable, 5
Austauschregeln, 62
Basen, negative, 38
Basis, 109, 111
Basis, 90
Basis, kanonische, 108
Basisdarstellung, 90
Basisdarstellung, zulässige, 92
Basislösung, 90
Basisvariable, 90
Bereich, zulässiger, 81
Betrag, 35, 119, 120
Betrag, 123
Betrag einer komplexen Zahl, 117
Betrag, (euklidischer), 110
Betragsungleichung, 36
Bijektion, 21
bijektiv, 21
Bild, 18
Darstellung, 112
Definition, rekursive, 26
Definitionsbereich, 17
Determinante, 42, 51–53, 56, 57
Determinante, Eigenschaften, 54
Determinate, 122
Differenz, 11
Differenz von Matrizen, 45
Differenz, symmetrische, 11
disjunkt, 11
Disjunktion, 5
Distributivgesetz, 6, 12, 112, 113
Division, 32
Drehung, 123
Dreieck, Pascalsches, 30
Dreiecksmatrix, 52
Dreiecksungleichung, 37
Durchschnitt, 11, 13
durchschnittsfremd, 11
Einheitsmatrix, 44
Einheitsvektor, 107, 110
Einheitsvektoren, 111
Element, 112
Entwicklung, 53
Euler-Formel, 119
Existenz-Quantor, 7
Exponential-Darstellung, 119
Exponentialdarstellung, 119–121
Exponentialfunktion, 118
Fallunterscheidung, 36
Funktion, 14, 16
Funktion, eineindeutige, 18
Funktion, gleichheit, 17
Funktion, injektive, 18
Funktion, komplexe, 118
129
Index
Funktion, surjektive, 18
Funktion, trigonometrische, 118
Gaußsche Zahlenebene, 115, 117
Gerade, 122–124
Gleichung, quadratische, 120
Gleichungssystem, allgemeines lineares, 59
Gleichungssystem, homogenes lineares, 56
Gleichungssystem, inhomogenes lineares, 56
Gleichungssystem, lineares, 42, 55, 58
Graph, 17
Halbebene, obere, 123
Halbebene, rechte, 123
Hauptstützelement, 62
Hilfsproblem, 100
Hyperbelfunktion, 118
Identität, 20
Imaginärteil, 115
Implikation, 5
Indexmenge, 13
Input-Output-Koeffizient, 41
Inverses, additives, 108
invertierbar, 50
Körper, 32, 105
Körper der komplexen Zahlen, 114
Körper, total angeordneter, 33
Kellerzeile, 64
Koeffizientenmatrix, 42
Kombination, 29
Kombinationen, 29
Kommutativgesetz, 6, 12, 112, 113
Komplement, 12
komplex konjugiert, 117
Komposition, 19
Kongruenztransformation, 123
konjugiert, 116
Konjunktion, 5
Koordinate, 108, 109
Koordinatenvektor, 109
Kreislinie, 123
Länge, 110
Lösung, 42, 82
130
Lösung, maximale, 82
Lösung, minimale, 82
Lösung, optimale, 82
Lehrsatz, binomischer, 37
linear unabhängig, 109
Linearkombination, 108, 109
linkseindeutig, 15
linkstotal, 15
Logarithmengesetze, 38
Logarithmus, 38
Matrix, 39, 51, 53, 56
Matrix, inverse, 50
Matrix, invertierbare, 55–57
Matrix, quadratische, 44
Matrix, Rechenregeln, 51
Matrix, symmetrische, 44
Matrix, transponierte, 43
Matrixgleichung, 51
Matrizenaddition, 106
Matrizenmultiplikation, 106
Menge, 7
Menge, leere, 10
Mengengleichheit, 9
Moivre-Formel, 119
Multiplikation, 32, 105, 107, 109
Multiplikation, komplexe, 113
Nebenbedingung, 81
Negation, 5
Nichtbasisvariable, 90
Nichtnegativitätsbedingungen, 81
Norm, 109, 110
Norm,euklidische, 110
Normalform, 59
Normalform der linearen Optimierung, 86
Nullmatrix, 43
Nullpunkt, 124
Nullstelle, 121
Nullvektor, 107, 108
Optimierungsproblem, lineares, 81
Ordnung, totale, 33
Ordnungsrelation, 14, 32
Ortsvektoren, 115
Index
Output-Bilanz, 41
Paar, geordnetes, 14
paarweise orthogonal, 111
Permutation, 26
Pivotelement, 62
Pivotspalte, 62
Pivotzeile, 62
Polardarstellung, 119
Polardarstellung komplexer Zahlen, 117, 118
Polynom, 118, 121
Potenz, n-te, 37
Potenzen mit natürlichen Exponenten, 26
Potenzen mit rationalen Exponenten, 38
Potenzfunktion, 118
Potenzgesetze, 38
Potenzmenge, 37
Potenzmenge, 10
Prädikat, einstufiges, 6
Prädikat, zweistufiges, 6
Prinzip der vollständigen Induktion, 25
Produkt von Matrizen, 47
Produkt, kartesisches, 14
Produktionskoeffizient, 41
Produktmatrix, 47
Produktzeichen, 36
Quantifikator, restringierter, 7
Raum, euklidischer, 110
Realteil, 115
rechtseindeutig, 15
Reflexivität, 33
Regel, Cramersche, 57, 58
Regeln, de Morgansche, 6, 12
Reihenfolge, 26, 29
Relation, 14
Sarrus-Regel, 43
Seite, rechte, 42
Simplex, 85
Simplex-Regel, 95
Simplextableau, 92
Simplextableau, entscheidbares, 94
Simplextableau, nicht-entscheidbares, 94
Simplextableau, optimales, 93
Simplexverfahren, 95
Skalarprodukt, 106, 109, 110, 122
Skalarprodukt, 47
Skalarprodukt, euklidisches, 109, 111
Spalte, 40
Spaltenvektor, 107
Spaltenvektor, 40
Spiegeln, 116
Spiegelung, 117
Spiegelung, 123, 124
Subtraktion, 32
Summe, 107, 108
Summe von Matrizen, 45
Summenzeichen, 36
System linearer Funktionen, 60
Teilmenge, 9
Teilmengen, 30
Transitivgesetz, 33
Trichotomie-Eigenschaft, 33
trigonometrische Form, 118
Tupel, 107
Typ einer Matrix, 39
Umformungen, äquivalente, 34
Umkehrabbildung, 20
Ungleichung, Cauchy-Schwarz-Bunjakowski,
111
Urbild, 18
Variation, 28
Vektor, 108–111
Vektor, 40
Vektor der Absolutglieder, 42
Vektor der Unbekannten, 42
Vektor, entgegengesetzter, 108
Vektor, normiert, 111
Vektor, normierter, 110
Vektor, orthogonal, 111
Vektor, orthonormal, 111
Vektorprodukt, 106
Vektorraum, 105, 106, 108, 110, 114
Vektorraum der Koordinatenvektoren, 109
Vektorraum, n-dimensionaler, 109
131
Index
Vereinigung, 11, 13
Verkettung, 19
Verschiebung, 115
Verschiebung, 123
Vielfaches, 107, 108
vollständig, 109
Wahrheitswert, 5
Wertebereich, 17
werteverlaufsgleich, 6
Wiederholung, 26, 29
Winkel, 123
Wurzel, 121
Wurzel, n-te, 37
Wurzeln, komplexe, 121
Zahl, irrationale, 38
Zahl, komplexe, 114, 116
Zahl, negative, 33
Zahl, nichtnegative, 33
Zahl, nichtpositive, 33
Zahl, positive, 33
Zahl, reelle, 113
Zahlengeraden, 36
Zeiger, 115
Zeile, 40
Zeilenvektor, 107
Zeilenvektor, 40
Zielfunktion, lineare, 81
132