Wahrscheinlichkeit
Werbung

WAHRSCHEINLICHKEIT UND STATISTIK
W.1 WAHRSCHEINLICHKEITEN
Wahrscheinlichkeit
Inhaltsverzeichnis
Wahrscheinlichkeit
W.1 Wahrscheinlichkeiten
W.1.1
W.1.2
W.1.3
W.1.4
W.1.5
Ereignisraum, Grundraum . . . . . . . . . . . . . . .
Wahrscheinlichkeitsmass . . . . . . . . . . . . . . . .
Endliche Räume . . . . . . . . . . . . . . . . . . . . . .
Bedingte Wahrscheinlichkeit. . . . . . . . . . . . . .
Unabhängigkeit . . . . . . . . . . . . . . . . . . . . . . .
W.2.1
W.2.2
W.2.3
W.2.4
W.2.5
W.2.6
Diskrete Zufallsvariablen . . . . . . . . . . . . . . . .
Stetige Zufallsvariablen . . . . . . . . . . . . . . . . .
Transformation von Zufallsvariablen . . . . . . . .
Simulation von Verteilungen. . . . . . . . . . . . . .
Erwartungswert. . . . . . . . . . . . . . . . . . . . . . .
Varianz und Standardabweichung . . . . . . . . . .
W.2 Zufallsvariablen
W.3 Wichtige Verteilungen
W.3.1 Diskrete Verteilungen . . . . . . . . . . . . . . . . . .
W.3.2 Stetige Verteilungen. . . . . . . . . . . . . . . . . . . .
W.4 Gemeinsame Verteilungen
W.4.1
W.4.2
W.4.3
W.4.4
W.4.5
W.4.6
Randverteilungen . . . . . . . . . . . . . . . . . . . . .
Bedingte Verteilung . . . . . . . . . . . . . . . . . . . .
Unabhängigkeit . . . . . . . . . . . . . . . . . . . . . . .
Funktionen von Zufallsvariablen . . . . . . . . . . .
Erwartungswert. . . . . . . . . . . . . . . . . . . . . . .
Kovarianz und Korrelation . . . . . . . . . . . . . . .
W.5.1
W.5.2
W.5.3
W.5.4
Gesetz der grossen Zahlen . . . . . . . . . . . . . . .
Zentraler Grenzwertsatz. . . . . . . . . . . . . . . . .
Chebyshev-Ungleichung . . . . . . . . . . . . . . . . .
Monte Carlo Integration . . . . . . . . . . . . . . . .
W.5 Grenzwertsätze
Statistik
S.1 Grundlagen
S.2 Deskriptive Statistik
S.2.1 Histogramm . . . . . . . . . . . . . . . . . . . . . . . . . .
S.2.2 Boxplot . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
S.2.3 QQ-Plot . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
W.1
Wahrscheinlichkeiten
1 W.1.1 Ereignisraum, Grundraum
1
1 Ereignisraum: Der Ereignisraum oder Grundraum Ω ist die
1 Menge aller möglichen Ereignisse eines Zufallexperiments. Die
1 Elemente ω ∈ Ω heissen Elementarereignisse.
2
2 Ereignis: Ein Ereignis A ⊆ Ω ist eine Teilmenge von Ω.
2 Die Klasse aller beobachtbaren Ereignisse F ist eine Teilmenge
2 der Potenzmenge P(Ω) von Ω.
2
2
3 W.1.2 Wahrscheinlichkeitsmass
3 Wahrscheinlichkeitsmass: Ein Wahrscheinlichkeitsmass P
3 ist eine Abbildung P : F → [0, 1] mit folgenden Eigenschaften:
3
i: P[Ω] = 1.
4 ii: P[A] ≥ 0 für alle A ∈ F .
S
P∞
5 iii: P[ ∞
i=1 Ai ] =
i=1 P[Ai ] falls Ai ∩ Aj = ∅ für i 6= j .
5
5 Aus denCAxiomen i bis iii folgen direkt die Rechenregeln:
i: P[A ] = 1 − P[A].
5
ii:
P[∅] = 0.
5
iii:
A
⊆ B ⇒ P[A] ≤ P[B].
6
iv:
P
[A
∪ B] = P[A] + P[B] − P[A ∩ B] (Additionsregel ).
6
6
6 W.1.3 Endliche Räume
6 Für einen endlichen Raum Ω = {ω , . . . , ω } mit P[ω ] = p
1
n
i
i
7 für alle 1 ≤ i ≤ n gilt
7
X
P[A] =
pi
7
i
mit
wi ∈A
7
Laplace-Raum: In einem Laplace-Raum sind alle Ereignisse
7 ω1 , . . . , ωn gleich wahrscheinlich (pi = pj für alle i, j ). Es gilt
7 dann
7
8
P [A] =
|A|
|Ω|
S.3 Schätzer
8
S.4 Tests
9 Bedingte Wahrscheinlichkeit: Seien
S.3.1 Momenten-Methode . . . . . . . . . . . . . . . . . . . .
S.3.2 Maximum-Likelihood . . . . . . . . . . . . . . . . . . .
S.4.1
S.4.2
S.4.3
S.4.4
S.4.5
S.4.6
S.4.7
S.4.8
Fehler 1. und 2. Art . . . . . . . . . . . . . . . . . . . .
Mögliches Vorgehen. . . . . . . . . . . . . . . . . . . . .
Likelihood-Quotienten Test . . . . . . . . . . . . . . .
z-Test. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
t-Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Gepaarter Zweistichprobentest. . . . . . . . . . . . .
Ungepaarter Zweistichprobentest . . . . . . . . . . .
Kondenzbereiche . . . . . . . . . . . . . . . . . . . . . .
Anhang
A.1 Kombinatorik
A.2 Reihen und Integrale
8
8
W.1.4 Bedingte Wahrscheinlichkeit
A, B Ereignisse und
P
[A] > 0, dann ist die bedingte Wahrscheinlichkeit von B
9
9 gegeben A deniert durch:
9
P[A ∩ B]
P[B | A] :=
9
P[A]
9
9 Aus der Denition der bedingten Wahrscheinlichkeit folgt die
9 Multiplikationsregel :
10
P[A ∩ B] = P[B | A]P[A]
10
Satz (Totale Wahrscheinlichkeit): Sei A1≤i≤n eine dis10 junkte Zerlegung von Ω, dann gilt für ein beliebiges
Ereignis
10 B :
P[B] =
n
X
P[B | Ai ]P[Ai ]
i=1
SEITE 1
JEROME DOHRAU
WAHRSCHEINLICHKEIT UND STATISTIK
W.2 ZUFALLSVARIABLEN
A1 , . . . , An eine disjunkte W.2.2 Stetige Zufallsvariablen
Zerlegung von Ω mit P[Ai ] > 0 für alle i und B ein Ereignis
Dichte: Eine Zufallsvariable X mit der Verteilungsfunktion
mit P[B] > 0, dann gilt für jedes k:
FX (t) heisst stetig mit Dichte fX : R → [0, ∞), falls gilt
P[B | Ak ]P[Ak ]
Z t
P[Ak | B] = Pn
i=1 P[B | Ai ]P[Ai ]
f (s)ds für alle t ∈ R.
F (t) =
Satz (Formel von Bayes): Sei
X
X
−∞
W.1.5 Unabhängigkeit
Unabhängigkeit: Die Ereignisse
A1 , . . . , An heissen unabhängig, wenn für alle m ∈ N und {k1 , . . . , km } ⊆ {1, . . . , n}
gilt
P
"m
\
#
Ak i =
i=1
m
Y
Für eine Dichtefunktion fX gilt:
i: fRX (t) ≥ 0 für alle t ∈ R.
∞
ii: −∞
fX (s)ds = 1.
Hinweis: Es gilt
P[Aki ].
stetig ist.
d
dt FX (t)
= fX (t) falls fX an der Stelle t
i=1
Hinweis: Bei unabhängigen Ereignissen A, B hat das Eintre- W.2.3 Transformation von Zufallsvariablen
ten des einen Ereignisses keinen Einuss auf die WahrscheinSatz: Sei X eine stetige Zufallsvariable mit Dichte fX und
lichkeit des anderen Ereignisses: P[B | A] = P[A∩B]
P[A] = P[B]
fX (t) = 0 für t ∈
/ I ⊆ R. Sei g : R → R stetig dierenzierbar
und streng monoton auf I mit Umkehrfunktion g −1 . Dann
hat die Zufallsvariable Y := g(X) die Dichte
W.2
Zufallsvariablen
(
Zufallsvariable: Eine Zufallsvariable X auf Ω ist eine Funktion X : Ω → W(X) ⊆ R. Jedes Elementarereignis ω wird auf
eine Zahl X(ω) abgebildet.
Verteilungsfunktion: Die Verteilungsfunktion einer Zufallsvariable X ist die Abbildung FX : R → [0, 1],
FX (t) := P[X ≤ t] := P[{ω | X(ω) ≤ t}].
fY =
d −1
g (t)| für t ∈ {g(x) | x ∈ I}
fX (g −1 (t))| dt
sont
0
Beispiel (Lineare Transformation): Aus Y
a > 0, b ∈ R folgt
t−b
t−b
= FX
FY (t) = P[aX + b ≤ t] = P X ≤
a
a
Jede Verteilungsfunktion FX hat folgende Eigenschaften:
i: a ≤ b ⇒ FX (a) ≤ FX (b) (monoton wachsend).
ii: lim FX (t) = FX (u) (rechtsstetig).
t→u,t>u
iii: lim FX (t) = 0 und lim FX (t) = 1.
und mit der Kettenregel ergibt sich
W.2.1 Diskrete Zufallsvariablen
folgt
t→−∞
:= aX +b mit
fY (t) =
1
d
FY (t) = fX
dt
a
t−b
a
.
t→∞
Beispiel (Nichtlineare Transformation): Aus
Y := X 2
Eine Zufallsvariable heisst diskret, falls ihr Wertebereich FY (t) = P[X 2 ≤ t] = P−√t ≤ X ≤ √t = FX √t−FX −√t
W(X) endlich oder abzählbar ist.
und somit
Gewichtsfunktion: Die Wahrscheinlichkeitsfunktion oder
√
√
Gewichtsfunktion einer diskreten Zufallsvariable X ist gegefX t + fX − t
d
√
fY (t) = FY (t) =
ben durch
dt
2 t
pX (x) =
P[X = x] für x ∈ W(X)
0
sonst
Eine Gewichtsfunktion weist folgende Eigenschaften auf:
i: P
pX (x) ∈ [0, 1] für alle x.
ii: xi ∈W(X) pX (xi ) = 1.
W.2.4 Simulation von Verteilungen
Satz: Sei F eine stetige und streng monoton wachsende Ver-
teilungsfunktion mit Umkehrfunktion F −1 . Ist X ∼ U(0, 1)
und Y := F −1 (X), so hat Y die Verteilungsfunktion F .
Diskrete Verteilungsfunktion: Die Verteilungsfunktion
Beispiel: Um die Verteilung Exp(λ) zu simulieren bestimmt
FX einer diskreten Zufallsvariable X mit Wertebereich
man zu der Verteilungsfunktion F (t) = 1 − e−λt für t ≥ 0 die
W(X) = {x1 , . . . , xn } ist die Funktion
Inverse F −1 (t) = − log(1−t)
. Mit U ∼ U(0, 1) erhält man
λ
X
FX (t) = P[X ≤ t] =
pX (xk )
log(1 − U )
xk ∈W(X)
X := F −1 (U ) = −
∼ Exp(λ).
xk ≤t
λ
SEITE 2
JEROME DOHRAU
WAHRSCHEINLICHKEIT UND STATISTIK
W.2.5 Erwartungswert
W.3 WICHTIGE VERTEILUNGEN
W.3.1.2 Bernoulli-Verteilung
Diskreter Erwartungswert: Ist X diskrete Zufallsvariable Eine bernoulli-verteilte Zufallsvariable X ∼ Be(p) mit Paramit Gewichtsfunktion pX , so ist der Erwartungswert von X meter p ∈ [0, 1] nimmt die Werte 0 und 1 mit Wahrscheinlichkeiten
deniert als
X
pX (1) = p und pX (0) = 1 − p
E[X] :=
xi pX (xi ),
xi ∈W(X)
an. Eine alternative Schreibweise ist
x
sofern diese Reihe konvergiert.
p (1 − p)1−x x ∈ {0, 1}
pX (x) =
0
sonst.
Stetiger Erwartungswert: Falls X eine stetige Zufallsvariable mit Dichte fX ist, dann ist der Erwartungswert von X
Erwartungswert : p
deniert als
Z ∞
Varianz
: p(1 − p)
E[X] :=
xfX (x)dx,
−∞
Beispiel (Münzwurf): Ein fairer Münzwurf ist bernoulli-
falls das Integral konvergiert.
verteilt mit Parameter p = 21 . Für einen Parameter p 6=
Satz (4.1): Sei X eine diskrete Zufallsvariable mit Gewichts- wäre der Münzwurf unfair.
funktion pX und Y := g(X), dann gilt
1
2
W.3.1.3 Binomialverteilung
E[Y ] = E[g(X)] =
X
g(xi )pX (xi ).
xi ∈W(X)
Falls X eine stetige Zufallsvariable mit Dichte fX ist, ist analog
Z
E[Y ] = E[g(X)] =
∞
g(x)fX (x)dx
Die Gewichtsfunktion pX einer binomial-verteilten Zufallsvariable X ∼ Bin(n, p) mit Parameter n ∈ N und p ∈ [0, 1] ist
gegeben durch
px (k) =
n k
p (1 − p)n−k
k
für k ∈ {0, . . . , n}
−∞
W.2.6 Varianz und Standardabweichung
Varianz: Sei X eine Zufallsvariable mit E[X 2 ] < ∞. Die Varianz von X ist deniert als
Var[X] := E (X − E(X))2 .
Erwartungswert : np
Varianz
: np(1 − p)
X ist die Anzahl der Erfolge k bei n unabhängigen
Wiederho-
lungen eines Bernoulli-Experiments. Es gibt nk verschiedene
Möglichkeiten bei n Versuchen k-mal erfolgreich zu sein. Jeder dieser Möglichkeit hat Wahrscheinlichkeit pk (1 − p)n−k .
Hinweis: Nach Satz 4.1 lässt sich die Varianz folgendermas- W.3.1.4 Geometrische Verteilung
sen berechnen:
Die Gewichtsfunktion pX einer geometrisch-gleichverteilten
Z ∞
2
Zufallsvariable X ∼ Geom(p) mit Parameter p ∈ [0, 1] ist
Var[X] =
(x − E[X]) fX (x)dx
gegeben durch
−∞
Standardabweichung: Die Standardabweichung einer Zufallsvariable X ist
σX :=
W.3
p
Var[X].
Wichtige Verteilungen
W.3.1 Diskrete Verteilungen
W.3.1.1 Diskrete Gleichverteilung
pX (k) = p(1 − p)k−1
Erwartungswert :
Varianz
:
1
p
1
p2 (1
für k ∈ {1, 2, . . .}
− p)
Beispiel (Wartezeit): Die Geometrische Verteilung ist
die Wahrscheinlichkeitsverteilung der Anzahl X BernoulliVersuche, die notwendig sind, um den ersten Erfolg zu erzielen. Für die Anzahl Würfelfwürfe, die man braucht um eine
6 zu würfeln, ist p = 61 .
Zufallsvariable X mit Wertebereich W(X) = {x1 , . . . , xn } W.3.1.5 Negativbinomiale Verteilung
und alle Werte haben die gleiche Wahrscheinlichkeit falls
Die Gewichtsfunktion pX einer negativ-binomial-verteilten
1
Zufallsvariable X mit Parameter r ∈ N und p ∈ [0, 1] ist
pX (xi ) =
für i ∈ {1, . . . , n}
gegeben durch
n
Beispiel (Würfeln): Die Zufallsvariable X gibt die Augen-
zahl bei einem Würfelwurf an. Der Wertebereich ist also
W = {1, 2, 3, 4, 5, 6} und somit n = 6.
SEITE 3
pX (k) =
k−1 r
p (1 − p)k−r
r−1
für k ∈ {r, r + 1, . . .}
JEROME DOHRAU
WAHRSCHEINLICHKEIT UND STATISTIK
W.3 WICHTIGE VERTEILUNGEN
a, b ∈ R wobei a < b sind gegeben durch
( 1
− p)
für t ∈ [a, b]
b−a
fX (t) =
0
für t ∈/ [a, b]
X entspricht der Wartezeit auf den r-ten Erfolg. Es gibt k−1
r−1
für t < a
möglichkeiten für r − 1 Erfolge bei k − 1 Versuchen; der r-te
0
t−a
Erfolg tritt ja beim k-ten Versuch ein.
für t ∈ [a, b]
FX =
b−a
1
für t > b
Erwartungswert :
Varianz
:
r
p
r
p2 (1
W.3.1.6 Hypergeometrische Verteilung
Die Gewichtsfunktion pX einer hypergeometrisch-verteilten
Zufallsvariable X mit Parameter r, n, m ∈ N, wobei r, m ≤ n,
ist gegeben durch
pX (k) =
r
k
n−r
m−k
n
m
für k ∈ {0, . . . , min{r, m}}
Erwartungswert : m nr
Varianz
: m nr (1 − nr ) n−m
n−1
In einer Urne benden sich n Gegenstände. Davon sind r
Gegenstände vom Typ A und n − r vom Typ B. Es werden m Gegenstände ohne Zurücklegen gezogen. X beschreibt
die Wahrscheinlichkeitsverteilung für die Anzahl k der Gegenstände vom Typ A in der Stichprobe.
Beispiel (Lotto): Anzahl Zahlen
n = 45, richtige Zahlen
r = 6, meine Zahlen m = 6. Die Wahrscheinlichkeit für 4
Richtige ist
6
4
39
2
45
6
pX (4) =
≈ 0.00136.
W.3.1.7 Poisson Verteilung
Erwartungswert : 12 (a + b)
1
Varianz
: 12
(a − b)2
Beispiel: Rundungsfehler einer Messung.
W.3.2.2 Exponentialverteilung
Die Dichte fX und Verteilungsfunktion FX einer exponentialverteilten Zufallsvariable X ∼ Exp(λ) mit Parameter λ > 0
sind gegeben durch
(
fX (t)
=
0
(
FX (t)
=
Erwartungswert :
Varianz
:
λe−λt
für t ≥ 0
für t < 0
1 − e−λt
0
für t ≥ 0
für t < 0
1
λ
1
λ2
Beispiel (Lebensdauer): Die Exponentialverteilung ist ei-
ne typische Lebensdauerverteilung. So ist beispielsweise die
Lebensdauer von elektronischen Bauelementen häug annähernd exponentialverteilt.
Die Gewichtsfunktion pX einer Poisson-verteilten Zufallsva- W.3.2.3 Normalverteilung
riable X ∼ P(λ) mit Parameter λ ist gegeben durch
Die Dichte fX einer normalverteilten Zufallsvariable X ∼
N (µ, σ 2 ) mit Parameter µ ∈ R und σ 2 > 0 ist gegeben durch
k
−λ λ
pX (k) = e
für k ∈ {0, 1, . . .}
2
k!
Erwartungswert : λ
Varianz
:λ
Die Poisson-Verteilung eignet sich zur Modellierung von seltenen Ereignissen, wie z.B. Versicherungsschäden.
fX (t) =
(t−µ)
1
√ e− 2σ2
σ 2π
Für die Verteilungsfunktion FX existiert kein geschlossener
Ausdruck. Deshalb werden die Werte der Verteilungsfunktion
Φ(t) der Standard-Normalverteilung
t2
1
fX (t) = √ e− 2
2π
Hinweis: Die Binomialverteilung Bin(n, p) kann approximativ durch die Poissonverteilung P(λ) mit λ = np berechnet mit µ = 0 und σ 2 = 1 tabelliert. Für allgemeine Normalverwerden. Faustregel: Die Approximation kann für np2 ≤ 0.05 teilungen berechnet man dann
benutzt werden.
X −µ
t−µ
t−µ
FX (t) = P[X ≤ t] = P
≤
=Φ
.
W.3.2 Stetige Verteilungen
W.3.2.1 Stetige Gleichverteilung
σ
σ
σ
Erwartungswert : µ
Varianz
: σ2
Die Dichte fX und Verteilungsfunktion FX einer stetigen und
gleichverteilten Zufallsvariable X ∼ U(a, b) mit Parameter Beispiel: Streuung von Messwerten um den Mittelwert.
SEITE 4
JEROME DOHRAU
WAHRSCHEINLICHKEIT UND STATISTIK
W.4 GEMEINSAME VERTEILUNGEN
Bedingte Dichte: Für zwei stetige Zufallsvariablen
X und
Y mit gemeinsamer Dichte fX,Y (x, y) ist die bedingte Dichte
Gemeinsame Verteilung: Die gemeinsame Verteilungs- fX|Y von X gegeben Y deniert durch
funktion von n Zufallsvariablen X1 , . . . , Xn ist die Abbildung
fX,Y (x, y)
F : Rn → [0, 1],
fX|Y (x | y) :=
fY (y)
F (t1 , . . . , tn ) := P[X1 ≤ t1 , . . . , Xn ≤ tn ].
falls fY (y) > 0 und 0 falls fY (y) = 0.
Gemeinsame Gewichtsfunktion: Falls X1 , . . . , Xn diskreW.4
Gemeinsame Verteilungen
te Zufallsvariablen sind, ist ihre gemeinsame Gewichtungsfunktion p : Rn → [0, 1] deniert durch
p(x1 , . . . , xn ) := P[X1 = x1 , . . . , Xn = xn ].
Gemeinsame Dichte: Seien
X1 , . . . , Xn stetige Zufallsvariablen mit gemeinsamer Verteilungsfunktion F (t1 , . . . , tn ).
Die Funktion f : Rn → [0, ∞) heisst gemeinsame Dichte von
X1 , . . . , Xn , falls für alle ti ∈ R gilt
Z
t1
F (t1 , . . . , tn ) =
Z
tn
...
−∞
f (x1 , . . . , xn )dxn . . . dx1
−∞
W.4.3 Unabhängigkeit
Unabhängigkeit: Die Zufallsvariablen
X1 , . . . , Xn heissen
unabhängig, falls die gemeinsame Verteilungsfunktion das
Produkt der Verteilungsfunktionen der Randverteilungen ist:
F (x1 , . . . , xn ) =
n
Y
FXi (xi )
i=1
Im diskreten Fall sind X1 , . . . , Xn unabhängig, genau dann
wenn
n
p(x1 , . . . , xn ) =
Y
pXi (xi )
Falls X1 , . . . , Xn eine gemeinsame Dichte f haben, so hat diei=1
se folgende Eigenschaften:
gilt und analog im stetigen Fall, falls
i: fR (t1 , . . . , tn ) ≥ 0 für alle ti ∈ R.
n
Y
ii: Rn f (t1 , . . . , tn )dµ = 1.R
fXi (xi ).
f
(x
,
.
.
.
,
x
)
=
1
n
iii: P[(X1 , . . . , Xn ) ∈ A] = (t1 ,...,tn )∈A f (t1 , . . . , tn )dµ.
n
i=1
iv: f (t1 , . . . , tn ) = ∂t1∂···∂tn F (t1 , . . . , tn ), falls deniert.
W.4.1 Randverteilungen
W.4.4 Funktionen von Zufallsvariablen
Ausgehend von den Zufallsvariablen X1 , . . . , Xn kann man
X und Y Zufallsvariablen mit ge- mit einer Funktion g : Rn → R eine neue Zufallsvariable Y =
meinsamer Verteilungsfunktion FX,Y , dann ist die Randver- g(X1 , . . . , Xn ) bilden.
teilung FX : R → [0, 1] von X deniert durch
Beispiel (Summe, diskret): Für die Gewichtsfunktion pZ
FX := P[X ≤ x] = P[X ≤ x, Y < ∞] = lim FX,Y (x, y).
der Summe Z = X + Y zweier diskreten Zufallsvariablen X
y→∞
und Y mit gemeinsamer Gewichtsfunktion p erhält man
Für zwei diskrete Zufallsvariablen X und Y mit gemeinsaX
X
P[X = xi , Y = z−xi ] =
p(xi , z−xi )
mer Gewichtsfunktion pX,Y (x, y) ist die Gewichtsfunktion der pZ (z) =
Randverteilung von X gegeben durch
xi ∈W(X)
xi ∈W(X)
X
X
Beispiel (Summe, stetig): Sind X und Y stetige ZufallspX = P[X = x] =
P[X = x, Y = yj ] =
pX,Y (x, yj ).
variablen mit gemeinsamer Dichte f , so ist die Verteilungsj
j
funktion FZ der Summe Z = X + Y gegeben durch
Für zwei stetige Zufallsvariablen X und Y mit gemeinsaZ ∞ Z z−x
Z z Z ∞
mer Dichte fX,Y (x, y) ist die Randdichte (Dichtefunktion der
v=x+y
FZ =
f (x, y)dydx =
f (x, v−x)dxdv
Randverteilung) von X gegeben durch
−∞ −∞
−∞ −∞
Z ∞
und somit auch die Dichte
fX (x) =
fX,Y (x, y)dy.
Z ∞
−∞
d
FZ (z) =
f (x, z − x)dx.
fZ =
dz
−∞
Randverteilung: Seien
W.4.2 Bedingte Verteilung
Bedingte Gewichtsfunktion: Seien X und Y diskrete Zu- W.4.4.1 i.i.d Annahme
fallsvariablen mit gemeinsamer Gewichtsfunktion pX,Y (x, y),
dann ist die bedingte Gewichtsfunktion pX|Y (x | y) von X Die Abkürzung i.i.d. kommt vom Englischen independent and
identically distributed. Die n-fache Wiederholung eines Zugegeben Y deniert durch
fallsexperiments ist selbst wieder ein Zufallsexperiment. Für
die Zufallsvariablen Xi der i-ten Wiederholung wird oft aus
pX,Y (x, y)
pX|Y (x | y) := P[X = x | Y = y] =
Gründen der Einfachheit Folgendes angenommen:
pY (y)
i: X1 , . . . , Xn sind paarweise unabhängig.
falls pY (y) > 0 und 0 falls pY (y) = 0.
ii: Alle Xi haben dieselbe Verteilung.
SEITE 5
JEROME DOHRAU
WAHRSCHEINLICHKEIT UND STATISTIK
W.4.4.2 Spezielle Funktionen von Zufallsvariablen
Wichtige Spezialfälle sind die Summe Sn = i=1 Xi und das
arithmetische Mittel X n = Snn .
1. Wenn Xi ∼ Be(p), dann ist Sn ∼ Bin(n, p).
2. Wenn Xi ∼ P(λ), dann ist Sn ∼ P(nλ).
3. Wenn Xi ∼ N (µ, σ 2 ), dann ist Sn ∼ N (nµ, nσ 2 ).
Für den Erwartungswert und die Varianz gilt allgemein
E[Sn ] = nE[Xi ] Var[Sn ] = nVar[Xi ]
Pn
W.4.5 Erwartungswert
W.5 GRENZWERTSÄTZE
Hinweis: Die Korrelation misst die Stärke und Richtung der
linearen Abhängigkeit zweier Zufallsvariablen X und Y :
Corr[X, Y ] = ±1 ⇔ ∃ a ∈ R, b > 0 : Y = a ± bX
Hinweis: Sind X und Y unabhängig, dann ist Cov[X, Y ] = 0
und Corr[X, Y ] = 0. Die Umkehrung gilt aber im Allgemeinen
nicht.
W.5
Hinweis: Der Erwartungswert einer n-dimensionalen Vertei-
Grenzwertsätze
lung wird als n-Tupel der Erwartungswerte aller Randverteilungen E[Xi ] angegeben.
W.5.1 Gesetz der grossen Zahlen
Y := g(X1 , . . . Xn ) der Zufallsvariablen X1 , . . . , Xn gilt im
µ = E[Xi ] und die Varianz Var[Xi ] = σ haben, gilt
Satz (Schwaches GGZ): Für eine Folge X1 , X2 , . . . von
Satz (4.2): Für den Erwartungswert E[Y ] einer Funktion unkorrelierten Zufallsvariablen, die alle2 den Erwartungswert
diskreten Fall
n
E[Y ] =
X
X n :=
g(x1 , . . . , xn )p(x1 , . . . , xn )
x1 ,...,xn
und analog im stetigen Fall
E[Y ] =
Z
n→∞
−→
µ = E[Xi ].
Das heisst
Z
...
1X
Xi
n i=1
P |X n − µ| > −→ 0 ∀ > 0.
g(x1 , . . . , xn )f (x1 , . . . , xn )dxn . . . dx1 .
n→∞
Rn
Satz (4.4): Seien X1 , . . . , Xn Zufallsvariablen mit endlichen Satz (Starkes GGZ): Für eine Folge X1 , X2 , . . . unabhängiger Zufallsvariablen, die alle den endlichen Erwartungswert
Erwartungswerten E[X1 ], . . . , E[Xn ], dann ist
µ = E[Xi ] haben, gilt
"
#
E a+
n
X
i=1
bi Xi = a +
n
X
bi E[Xi ].
i=1
W.4.6 Kovarianz und Korrelation
Kovarianz: Seien X und Y Zufallsvariablen mit E[X 2 ] < ∞
und E[Y 2 ] < ∞, dann ist die Kovarianz von X und Y gegeben
durch
Cov[X, Y ] := E[(X − E(X))(Y − E(Y ))].
Es gelten folgende Rechenregeln:
i: Var[X] = E[X 2 ] − E[X]2 .
ii: Var[a +P
bX] = b2 Var[X]
P.
iii: Var[a+ ni=1 bi Xi ] = ni=1 b2i Var[Xi ], für Xi unabhängig.
iv: Var[X + Y ] = Var[X] + Var[Y ] + 2Cov[X, Y ].
v: Cov[X, Y ] = Cov[Y, X].
vi: Cov[X, X] = Var[X].
vii: Cov[X, Y ] = E[XY ] − E[X]E[Y ].
viii: Cov[X, a] = 0 für alle a ∈ R.
ix: Cov[X, bY ] = bCov[X, Y ] für alle b ∈ R.
x: Cov[X, YP+ Z] = Cov[X,PY ] + Cov[X, Z].
xi: Cov[a + ni=1 bi Xi , c + m
j=1 dj Yj ]
Pn Pm
= i=1 j=1 bi dj Cov[Xi , Yj ]
xii: Cov[X, Y ] = 0, falls X und Y unabhängig.
Korrelation: Seien X und Y Zufallsvariablen, dann heisst
Cov[X, Y ]
p
Corr[X, Y ] := p
Var[X] Var[Y ]
Korrelation von X und Y . Ist Corr[X, Y ] = 0, oder äquivalent
Cov[X, Y ] = 0, dann heissen X und Y unkorreliert.
SEITE 6
n
X n :=
1X
Xi
n i=1
n→∞
−→
µ = E[Xi ]. P-fastsicher
Das heisst
h
i
P {ω ∈ Ω | X n (ω) −→ µ} = 1.
n→∞
W.5.2 Zentraler Grenzwertsatz
Satz (ZGS): Sei
X1 , X2 , . . . eine Folge von i.i.d. Zufallsvariablen mit µ P
= E[Xi ] und σ 2 = Var[Xi ], dann gilt für die
Summe Sn = ni=1 Xi
Sn − nµ
√
lim P
≤ t = Φ(t) ∀t ∈ R
n→∞
σ n
wobei Φ die Verteilungsfunktion von N (0, 1) ist.
Hinweis: Die Summe
Sn hat Erwartungswert E[Sn ] = nµ
und Varianz Var[Sn ] = nσ 2 . Die Grösse
Sn∗ :=
Sn − nµ
Sn − E[Sn ]
√
= p
σ n
Var[Sn ]
hat Erwartungswert 0 und Varianz 1. Für grosse n gilt zudem:
P[Sn∗ ≤ x]
Sn∗
Sn
≈
∼
approx.
∼
approx.
Φ(x)
N (0, 1)
N (nµ, nσ 2 )
JEROME DOHRAU
WAHRSCHEINLICHKEIT UND STATISTIK
S.2 DESKRIPTIVE STATISTIK
W.5.3 Chebyshev-Ungleichung
S.2
Für eine Zufallsvariable Y mit Erwartungswert µY und Varianz σY2 und jedes > 0 gilt
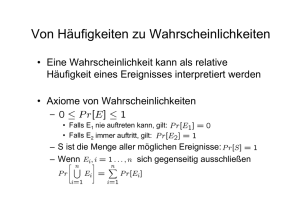
S.2.1 Histogramm
Deskriptive Statistik
Bei grossem Stichprobenumfang n werden benachbarte Werte zu einer Klasse zusammengefasst. Der Wertebereich der
Daten wird dadurch in disjunkte Intervalle (die Klassen) unterteilt.
W.5.4 Monte Carlo Integration
i) √
Die Anzahl der Klassen sollte von der Grössenordnung
Das Integral
Z 1
n sein.
ii)
Die
Klassenbreite sollte für alle Klassen gleich sein; als
g(x)dx
I :=
0
Ausnahme können die Klassen am linken und rechten
lässt sich als Erwartungswert auassen, denn mit einer gleichRand grösser sein (Ausreisser).
verteilten Zufallsvariable U ∼ U(0, 1) folgt
P[|Y − µY | > ] ≤
E[g(U )] =
Z
σY2
.
2
∞
Z
−∞
1
g(x)dx.
g(x)fU (x)dx =
0
180
Mit einer Folge von Zufallsvariablen U1 , . . . , Un , die unabhängig gleichverteilt Ui ∼ U(0, 1) sind, lässt sich das Integral approximieren: Nach dem schwachen Gesetz der grossen Zahlen
gilt
g(Un ) =
1
n
n
X
200
160
140
120
100
g(Ui ) −→ E[g(U1 )] = I.
n→∞
80
i=1
Statistik
S.1
60
40
20
0
−4
Grundlagen
Stichprobe: Die Gesamtheit der Beobachtungen
x1 , . . . , x n
−3
−2
−1
0
1
2
3
4
Abb. 1: Histogramm einer standard-norvmalverteilten Zufallsvariable.
oder der Zufallsvariablen X1 , . . . , Xn wird Stichprobe genannt; die Anzahl n heisst Stichprobenumfang.
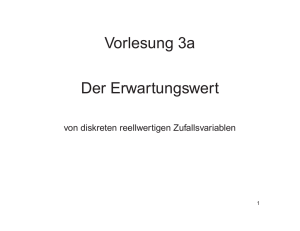
Empirische Verteilungsfunktion: Die empirische Vertei- S.2.2
Boxplot
lungsfunktion Fn zu den Messdaten x1 , . . . , xn ist deniert Aus einem Boxplot lässt sich folgendes ablesen:
durch
a: empirischer Median
X
1
1
b: empirisches 0.25-Quantil
Fn (y) := |{xi | xi ≤ y}| =
fi .
c: empirisches 0.75-Quantil
n
n
i mit xi ≤y
d: kleinster Datenwert xi mit b − xi < 1.5(c − b)
e: grösster Datenwert xi mit xi − c < 1.5(c − b)
Empirischer Mittelwert:
f: Ausreisser
n
xn = x =
1X
xi
n i=1
Empirische Varianz und Standardabweichung:
n
1 X
s2n = s2 =
(xi − x)2
n − 1 i=1
Empirisches Quantil: Das empirische α-Quantil zu den geordneten Daten x(1) , . . . , x(n) ist gegeben durch
e
11
c
10
b
8
7
(1 − α)x(k) + αx(k+1) = x(k) + α x(k+1) − x(k) ,
6
wobei k = bαnc und α ∈ (0, 1). Damit liegt etwa der Anteil
α unterhalb des empirischen α-Quantils, und somit etwa der
Anteil 1 − α oberhalb.
5
Empirischer Median: Der empirische Median ist deniert
a
9
d
f
4
1
Abb. 2: Boxplot
als das 0.5-Quantil.
SEITE 7
JEROME DOHRAU
WAHRSCHEINLICHKEIT UND STATISTIK
S.3 SCHÄTZER
S.2.3 QQ-Plot
Es gilt aber auch Var[X] = E[X 2 ] − E[X]2 = λ. Es kann also
auch g1 (µ1 , µ2 ) = µ2 − µ21 gewählt werden. Dadurch erhält
Mit einem QQ-Plot (Quantil-Quantil) kann man die Abwei- man einen
anderen Momentenschätzer
chung der Daten von einer gewählten Modell-Verteilung F
!
!2
graphisch überprüfen.
n
n
n
X
1X 2
1X
Es werden die empirischen Quantile auf der y -Achse gegenλ
=
xi −
xi
(xi − x)2
=
n
n
über den theoretischen Quantilen auf der x-Achse geplottet.
i=1
i=1
i=1
MM
S.3
S.3.2 Maximum-Likelihood
Schätzer
Für eine Stichprobe X1 , . . . , Xn soll ein passendes Modell gefunden werden. Die Parameter ϑ = (ϑ1 , . . . , ϑm ) des Modells
versucht man mit einem Schätzer T = (T1 , . . . , Tm ) aufgrund
der Stichprobe herauszunden. Die Schätzer sind Zufallsvariablen der Form Tj = tj (X1 , . . . , Xn ) für eine geeignete Funktion tj : Rn → R. Durch Einsetzen von Daten xi erhält man
Schätzwertwerte tj (x1 , . . . , xn ) für ϑj .
Es wird von einer Zufallsvariable X1 , . . . , Xn ausgegangen, deren gemeinsame Dichte f (t1 , . . . , tn | ϑ) von einem Parameter
ϑ abhängt. Die Likelihood-Funktion L ist gegeben durch
L(x1 , . . . , xn | ϑ) = f (x1 , . . . , xn | ϑ).
Anschaulich ist das die Wahrscheinlichkeit , dass im Modell
Pϑ die Stichprobe X1 , . . . , Xn die Werte x1 , . . . , xn liefert. Um
eine
möglichst gute Anpassung des Modells an die Daten zu
Erwartungstreu: Ein Schätzer T heisst erwartungstreu für erreichen,
wird der Likelihood-Schätzer als Funktion von ϑ
ϑ, falls E[T ] = ϑ (im Mittel wird richtig geschätzt).
maximiert.
Konsistent: Eine Folge von Schätzern T (n) , n ∈ N heisst
konsistent für ϑ, falls T (n) für n → ∞ im Modell Pϑ gegen ϑ Hinweis: Im diskreten Fall wird lediglich die Dichte f durch
die Gewichtsfunktion p ersetzt.
konvergiert. Das heisst für jedes ϑ ∈ Θ und > 0 gilt
1
lim P[ |T (n) − ϑ| > ] = 0.
Oft sind die Zufallsvariablen Xi unter Pϑ i.i.d. mit Dichtefunktion f (t | ϑ), so dass sich die Likelihood-Funktion vereinHinweis: Der Grundraum Ω und die Menge der beobacht- facht zu
n
Y
baren Ereignisse F sind fest. Die Wahl des Parameters ϑ aus
L(x
,
.
.
.
,
x
|
ϑ)
=
f (xi | ϑ).
1
n
dem Parameterraum Θ hat aber Einuss auf das Wahrscheini=1
lichkeitsmass Pϑ . Mit Eϑ wird der Erwartungswert unter Pϑ
bezeichnet.
Aufgrund der Monotonie des Logarithmus kann dann die logarithmierte Likelihood-Funktion verwendet werden, ohne dass
sich dadurch das Maximum der Funktion verschiebt.
S.3.1 Momenten-Methode
n→∞
Moment: Das k-te Moment einer Zufallsvariablen X im Model Pϑ ist
µk := µk (ϑ) := Eϑ [X ].
log L(x1 , . . . , xn | ϑ) =
k -te Stichprobenmoment von
Zufallsvarialben X1 , . . . , Xn ist
n
µ̂k :=
1X k
X .
n i=1 i
Die Parameter ϑi der theoretischen Verteilung werden als
Funktion der Momente µk angegeben.
ϑj = gj (µ1 , . . . , µm ) für j ∈ {1, . . . , m}
log f (xi | ϑ)
i=1
k
Stichprobenmoment: Das
n
X
Beispiel: Gegeben seien
n unabhängige Realisierungen
x1 , . . . , xn einer Zufallsvariable X ∼ Exp(λ) mit Dichte
f (t) = λe−λt 1[0,∞) (t) und unbekanntem Parameter λ. Für
die Likelihood-Funktion erhält man
L(λ) := L(x1 , . . . , xn | λ) =
n
Y
λe−λxi
i=1
und durch logarithmieren
n
X
log λe−λxi = n log λ − λ
n
X
xi .
Den Momentenschätzer für ϑ = (ϑ1 , . . . , ϑm ) erhält man, ini=1
i=1
dem man die Stichprobenmomente in die Funktionen der Momente einsetzt; der Schätzer ist also T = (T1 , . . . , Tm ) mit
Zur Bestimmung des Maximums wird die Ableitung nullgesetzt:
Tj := gj (µ̂1 , . . . , µ̂m ) für j ∈ {1, . . . , m}
log L(λ) =
Beispiel: Gegeben seien
n unabhängige Realisierungen
x1 , . . . , xn einer Zufallsvariablen X ∼ P(λ). Es gilt E[X] = λ.
Für die Funktion g1 kann also die Idendität gewählt werden.
Der Momentenschätzer ist somit
SEITE 8
⇒
n
λLH = Pn
i=1
xi
d
n
Aus dλ
2 L(λ) = − λ2 < 0 für λ > 0 folgt, dass es sich auch
tatsächlich um ein Maximum handelt.
2
n
λMM = µ̂1 =
n
d
n X
!
log L(λ) = −
xi = 0
dλ
λ i=1
1X
xi = x.
n i=1
1 oder
zumindest das stetige Pendant zur Wahrscheinlichkeit.
JEROME DOHRAU
WAHRSCHEINLICHKEIT UND STATISTIK
S.4
Tests
S.4.1 Fehler 1. und 2. Art
Fehler 1. Art: Die Hypothese wird zu Unrecht abgelehnt,
S.4 TESTS
Ist dieser Quotient klein, sind die Beobachtungen im Modell
PΘA deutlich wahrscheinlicher als im Modell PΘ0 . Der Verwerfungsbereich K := [0, c) wird so gewählt, dass der Test
das gewünschte Signikanzniveau einhält.
d.h. obwohl sie richtig ist. Die Wahrscheinlichkeit für einen Hinweis: Sind Hypothese und Alternative beide einfach, so
Fehler 1. Art ist
ist der Test optimal (nach Neyman-Pearson-Lemma).
Pϑ [T ∈ K] für ϑ ∈ Θ0 .
Fehler 2. Art: Die Hypothese wird akzeptiert, obwohl sie S.4.4
falsch ist. Die Wahrscheinlichkeit für einen Fehler 2. Art ist
Pϑ [T ∈/ K] = 1 − Pϑ [T ∈ K] für ϑ ∈ ΘA .
S.4.2 Mögliches Vorgehen
z-Test
Seien X1 , . . . , Xn i.i.d.
∼ N (ϑ0 , σ 2 ) unter Pϑ0 mit bekannter Va2
rianz σ . Es soll die Hypothese H0 : ϑ = ϑ0 getestet werden.
Mögliche Alternativen HA sind ϑ > ϑ0 , ϑ < ϑ0 (einseitig)
oder ϑ 6= ϑ0 (zweiseitig). Die Teststatistik ist
Ausgangspunkt ist eine Stichprobe X1 , . . . , Xn in einem MoX n − ϑ0
dell Pϑ mit unbekanntem Parameter ϑ ∈ Θ.
√ ∼ N (0, 1)
T :=
σX / n
1: Aufgrund einer Vermutung, wo sich der richtige Parameter ϑ bendet, werden eine Hypothese Θ0 ⊆ Θ und eine unter dem Modell P . Der Verwerfungsbereich ist von der
ϑ0
Alternative ΘA ⊆ Θ mit Θ0 ∩ ΘA = ∅ formuliert:
Form (c> , ∞), bzw. (−∞, c< ), bzw. (−∞, −c6= ) ∪ (c6= , ∞).
Hypothese H0 : ϑ ∈ Θ0
Zum Beispiel liefert die Bedingung
Alternative HA : ϑ ∈ ΘA
α = Pϑ0 [T ∈ K> ] = Pϑ0 [T > c> ] = 1 − Φ(c> ),
Hinweis: Die Hypotese (bzw. Alternative) heisst einfach,
falls sie nur aus einem einzelnen Wert besteht, also z.B. dass c> = Φ−1 (1 − α), also das (1 − α)-Quantil der N (0, 1)Θ0 = {ϑ0 } (bzw. ΘA = {ϑA }).
Verteilung, sein muss.
2. Es wird eine Teststatistik T = t(X1 , . . . , Xn ) gewählt,
S.4.5 t-Test
wobei t : Rn → R eine geeignete Funktion ist.
3. Es wird ein Signikanzniveau α ∈ (0, 1) gewählt.
4. Ein Verwerfungsbereich K ⊆ R wird konstruiert, so dass Seien X1 , . . . , Xn ∼ N (µ0 , σ 2 ) unter Pϑ wobei ϑ = (µ, σ 2 )
und insbesondere die Varianz σ 2 unbekannt ist. Die Hypothesup Pϑ [T ∈ K] ≤ α.
se H0 : µ = µ0 soll getestet werden. Die
ϑ∈Θ0
Pnunbekannte 2Varianz
1
σ 2 wird durch den Schätzer s2 = n−1
i=1 (Xi − X) (empiDadurch wird die Wahrscheinlichkeit eines Fehlers 1. Art rische Varianz) ersetzt. Danach kann mit der Teststatistik
durch α beschränkt.
5. Die Hypothese wird verworfen, falls der realisierte Wert
X n − µ0
√
∼ tn−1
T :=
t(x1 , . . . , xn ) im Verwerfungsbereich K liegt.
s/ n
i.i.d.
Hinweis: Alternative zu Schritt 4 und 5: Der P-Wert p wird gleich wie beim z-Test vorgegangen werden.
berechnet und die Hypothese verworfen, falls p ≤ α.
P-Wert: Der P-Wert ist die Wahrscheinlichkeit, dass unter S.4.6
Gepaarter Zweistichprobentest
der Nullhypothese H0 ein zufälliger Versuch mindestens so
Seien X1≤i≤n ∼ N (µX , σ 2 ) und Y1≤i≤n ∼ N (µY , σ 2 ) unextrem ausfällt, wie der beobachtete Wert t.
ter Pϑ . Falls man eine natürliche Paarbildung zwischen Xi
und Yi hat, lässt der Test zum Vergleich von µX und µY auf
Macht: Die Macht eines Tests ist die Funktion
eine Stichprobe zurückführen:
β : ΘA → [0, 1], ϑ 7→ β(ϑ) := Pϑ [T ∈ K].
i.i.d.
Das Maximieren der Macht β(ϑ) entspricht dem Minimieren
der Wahrscheinlichkeit für einen Fehler 2. Art 1 − β(ϑ) =
Pϑ [T ∈/ K] für ϑ ∈ ΘA .
S.4.3 Likelihood-Quotienten Test
i.i.d.
i.i.d.
Zi := Xi − Yi ∼ N (µx − µy , 2σ 2 )
S.4.7 Ungepaarter Zweistichprobentest
Seien X1≤i≤n ∼ N (µX , σ 2 ) und Y1≤i≤m ∼ N (µY , σ 2 )
Als Teststatistik wird der Likelihood-Quotient R gewählt, wo- unter Pϑ2.
a) Ist σ bekannt, so ist die Teststatistik
bei L die Likelihood-Funktion ist:
sup L(x1 , . . . , xn | ϑ)
T := R(x1 , . . . , xn ) :=
ϑ∈Θ0
sup L(x1 , . . . , xn | ϑ)
ϑ∈ΘA
SEITE 9
i.i.d.
T :=
i.i.d.
(X n − Y m ) − (µX − µY )
q
∼ N (0, 1).
1
σ n1 + m
JEROME DOHRAU
WAHRSCHEINLICHKEIT UND STATISTIK
b) Ist σ2 unbekannt, berechnet man
1
((n − 1)s2X + (m − 1)s2Y )
m+n−2
s2 :=
A.2 REIHEN UND INTEGRALE
Bei den folgenden Integralen wurden die Integrationskonstanten weggelassen.
R
und wählt für die Teststatistik
R
R
(X n − Y m ) − (µX − µY )
q
∼ tn+m−2
1
s n1 + m
T :=
S.4.8 Kondenzbereiche
(ax + b) dx
R 1
x dx
R 1
ax+b dx
R 1
x2 +a2 dx
proben X1 , . . . , Xn ist eine Menge C(X1 , . . . , Xn ) ⊆ Θ. In
den meisten Fällen ist das ein Intervall, dessen Endpunkte
von X1 , . . . , Xn abhängen.
C heisst ein Kondenzbereich zum Niveau 1 − α, falls gilt
R
R
Pϑ [ϑ ∈ C(X1 , . . . , Xn )] ≥ 1 − α
A.1
R
geordnet
mit zurücklegen
ohne zurücklegen
n
ungeordnet
n+k−1
k
n
k
n!
(n−k)!
k
Reihen und Integrale
Pn
k
=
k2
=
n(n+1)
2
n(n+1)(2n+1)
6
k
k=0 a0 q
P∞
k
k=0 a0 q
P∞ k
k=0 ak
=
a0 1−q
1−q
=
=
a0
1−q
a
(a−1)2 ,
xk
k=0 k!
=
ex
k=1
Pn
k=1
=
log|x|,
=
1
a
1
a
=
eax dx =
xeax dx =
Pn
P∞
a 6= −1
c+1
+ b)
arctan xa
1 ax
ae
eax
a2 (ax
2
x
a
− 1)
2x
a2
eax
R
log|x| dx =
x(log|x| − 1)
−
+
2
a3
x(loga |x| − loga e)
xa+1
1
a+1 log x − a+1 ,
1
2
c 6= −1
log|ax + b|
x2 eax dx =
loga |x| dx =
,
x 6= 0
R
xa log x dx =
R 1
x log x dx =
Ziehen von k Elementen aus einer Menge mit n Elementen
A.2
=
R
Kombinatorik
ax
1
a+1
,
a+1 x
1
a(c+1) (ax
xa dx =
c
Kondenzbereich: Ein Kondenzbereich für ϑ zu den Stich-
Anhang
a dx =
log2 x,
R
sin(ax + b) dx =
− a1 cos(ax + b)
R
cos(ax + b) dx
R
tan x dx
R 1
sin x dx
R 1
cos x dx
R
sin2 x dx
R
cos2 x dx
R
tan2 x dx
=
1
a
=
− log|cos x|
=
log|tan x2 |
=
log|tan( x2 + π4 )|
=
=
1
2 (x
1
2 (x
=
tan x − x
dx =
log|f (x)|
a 6= −1, x > 0
x>0
sin(ax + b)
− sin x cos x)
+ sin x cos x)
n+1
R
f 0 (x)
f (x)
|a| > 1
Partielle Integration:
Z
b
a
b
f 0 (x)g(x)dx = [f (x)g(x)]a −
Z
b
f (x)g 0 (x)dx
a
Substitutionsregel:
Z
b
0
f (g(x))g (x)dx
a
SEITE 10
t=g(x)
Z
g(b)
=
f (t)dt
g(a)
JEROME DOHRAU