Amphibien 1 - Universität Bielefeld
Werbung

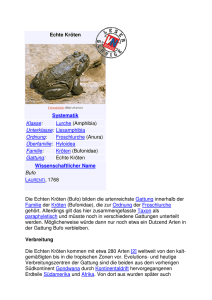
Universität Bielefeld SS 2002 Seminar Unterwasserbildverarbeitung Das visuelle Erkennungssystem der Kröte (Bufo bufo) Kerstin Bunte Leena Katharina Hanisch Nils Homann 17. Juli 2002 1 Zusammenfassung In der folgenden Ausarbeitung, welche im Rahmen des Seminars Unterwasserbildverarbeitung im Sommer-Semester 2002 an der Universität Bielefeld entstand und vorgetragen wurde, soll auf verständliche Weise dargestellt werden, wie das Visuelle Beute - Feind - Erkennungssystem der Kröte funktioniert, beziehungsweise ferner wo es im Gehirn der Kröte lokalisiert ist. Dazu werden drei verschiedene Ansätze gemacht. Zuerst auf Verhaltensbiologischer Basis, dann auf Neurophysiologischer Basis, und zuletzt wird ein kybernetisches Modell der beteiligten Hirnregionen in Form eines Neuronalen Netzes entworfen. Im ersten Teil wird anhand von verhaltensphysiologischen Experimenten gezeigt, wann die Kröte einen Reiz als Feind und wann als Beute klassiziert, und durch welche Maÿnahmen man dieses Verhalten beeinussen kann. Weiterhin wird eine erste Karte der maÿgeblich beteiligten Hirnregionen erstellt. Diese wird dann im zweiten Teil aus neurophysiologischer Sicht analysiert und in ihre Feinstrukturen gegliedert. Hierbei spielen die am Erkennungsprozess beteiligten Neuronen eine besondere Rolle. Im letzten Teil schlieÿlich wird ein kleiner Abriss über die Geschichte und Entwicklung der Neuronalen Netze (N.N) präsentiert. Anschlieÿend wird versucht die grundlegenden Eigenschaften eines N.N. Modells für das Beute - Feind - Erkennungssystem der Kröte festzulegen. INHALTSVERZEICHNIS 2 Inhaltsverzeichnis 1 Verhaltensgrundlagen der Kröte 1.1 1.2 1.3 1.4 Einführung . . . . . . . . . . . . . . . . . . . . . Schlüsselreiz Beute . . . . . . . . . . . . . . . . 1.2.1 Unterschiedliche Wertungen eines Reizes . 1.2.2 Form-Parameter . . . . . . . . . . . . . . . 1.2.3 Sehvermögen . . . . . . . . . . . . . . . . 1.2.4 Reiz-Hintergrund-Kontrast . . . . . . . . . 1.2.5 Saisonabhängigkeiten . . . . . . . . . . . . 1.2.6 Motivation . . . . . . . . . . . . . . . . . . 1.2.7 Gewöhnungseekte . . . . . . . . . . . . . Schlüsselreiz Feind . . . . . . . . . . . . . . . . 1.3.1 Form-Parameter . . . . . . . . . . . . . . . 1.3.2 Geschwindigkeit- und Kontrast-Parameter 1.3.3 Schlussfolgerungen . . . . . . . . . . . . . Elektrische Punktstimulation . . . . . . . . . . . 1.4.1 Beutefangverhalten . . . . . . . . . . . . . 1.4.2 Fluchtverhalten . . . . . . . . . . . . . . . 1.4.3 Gewöhnungseekte . . . . . . . . . . . . . 1.4.4 Schlussfolgerungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 Nervenzellen der Kröte 2.1 2.2 3.2 3.3 3.4 3 4 4 5 7 7 8 9 10 11 12 13 14 15 16 17 17 17 18 Aufbau der Nervenzelle . . . . . . . . . . . . . . . . . . . . . . 18 Die verschiedenen Neuronentypen . . . . . . . . . . . . . . . . 19 3 Einführung in die Geschichte der Neuronalen Netze (NN) 3.1 3 Die erste Theorie der Neuronalen Netze . 3.1.1 Erste Neur(on)ale Logik (1938 bis 3.1.2 Weitere Entwicklung bis heute . . Beschreibung des Modells . . . . . . . . 3.2.1 Charakteristika des Modells . . . Aufbau des simulierten Systems . . . . . 3.3.1 Komponenten . . . . . . . . . . . 3.3.2 Interaktionsmodell . . . . . . . . Schlussfolgerungen . . . . . . . . . . . . A Literaturverzeichnis . . . . 1943) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 21 23 23 23 24 24 24 25 26 26 1 VERHALTENSGRUNDLAGEN DER KRÖTE 3 1 Verhaltensgrundlagen der Kröte 1.1 Einführung Bei Menschen, genauso wie bei Tieren, spielt die visuelle Erkennung von Signalen eine wichtige Rolle für das Verhalten. Die Missinterpretation von Signalen, beispielsweise im Verkehr, könnte fatale Folgen nach sich ziehen. Neurophysiologen, Ethologen, Sprachwissenschaftler und Systemtheoretiker sind nur einige, die sich mit der Frage befassen, welche Mechanismen in dem gesamten komplexen System für diesen grundlegenden Erkennungsprozess verantwortlich sind. Grundlegende experimentelle, neurophysiologische Forschungen brachten die Entwicklung von Modellen der Nervenkreisläufe hervor, die die Analyse verschiedener Parameter des Antriebs erlaubten. Noch immer ist aber relativ wenig bekannt über diese Prozesse und den Code der Nerven. Die Analyse derartiger Wirkungen auf die höheren Wirbeltiere ist problematisch. Häug ist es unklar, welche Signale bedeutsam sind, und darum sollten sie für experimentelle Analysen isoliert werden. Ferner leiten höhere Wirbeltiere manchmal die Bedeutung eines Reizes mittels ihrer individuellen Erfahrung ab. In der vergleichenden Ethologie, werden solche Reize Schlüssel-Reize genannt. Sie aktivieren nach dem Schlüssel-Schloss -Prinzip bestimmte Verhaltensmuster als Antwort auf den jeweiligen Reiz. Dieses lternde System aus Nerven wird angeborener-Auslöse-Mechanismus genannt (IRM-Innate Releasing Mechanism). Die neurophysiologischen Studien basieren auf folgenden einleitenden Bedingungen: 1. der Schlüssel-Reiz kann dargestellt werden durch eine Attrappe 2. die beobachtete Verhaltensreaktion des Tieres kann wiederholt hervorgerufen werden durch diesen Reiz 3. die Wirksamkeit und mit diesem die Bedeutung des Schlüssel-Reizes für das Verhalten ist messbar Derartige quantitative Beschreibungen der Umformungen des sensorischen Motors leiten die Studien der einzelnen Teile dieses sensorischen Systems, um die individuellen Funktionen für den Ein- und Ausgang zu bestimmen. Feste Verhaltensmuster und verwendete Schlüssel-Reize können eine zuverlässige Studie liefern, besonders im Falle der primitiveren Wirbeltiere. In diesem Kontext bieten Amphibien verschiedene Möglichkeiten. Wir wollen nun die neurobiologischen Grundlagen für das visuelle Mustererkennungs-System das IRM betrachten, das der Kröte hilft Beute zu erkennen, unwichtige Objekte zu ignorieren und Feinde zu meiden. 1 VERHALTENSGRUNDLAGEN DER KRÖTE 4 1.2 Schlüsselreiz Beute Das Beutefangverhalten von Kröten basiert auf einem fest ablaufendem Muster: 1. Orientierte Bewegung zur Beute hin (mit Kopfdrehung oder Drehung des gesamten Körpers) 2. Beute verfolgen 3. Fixieren und Schnappen 4. Schlucken 5. Reinigen der Schnauze mit der Vorderpfote Diese Verhaltenssequenz besteht aus einer Reiz-Antwort-Kette, in der jede Reaktion einen Auslösereiz für die folgende Antwort festsetzt. Zum Beispiel reizt die zweiäugige Fixierung das Schnappen, während die mechanische Reizung das Verschlucken und Abwischen hervorruft. Es ist noch nicht genau bekannt wie, aber diese Verhaltensmuster sind oensichtlich im Zentralnervensystem miteinander verbunden. Kröten zeigen ihr anfängliches Interesse an einem vermeintlichen Beuteobjekt durch eine gezielte Orientierungsbewegung. Besitzt der Reiz nicht die typischen Erkennungsmerkmale einer Beute, beendet das Tier seine Orientierungsbewegung für gewöhnlich. Aber irgendwann kann das ablaufende Verhaltensmuster nicht mehr unterbrochen werden. Wenn z. B. das Beuteobjekt während der Fixierung plötzlich entfernt wird, werden die nachfolgenden Verhaltensmuster (Schnappen, Schlucken, Wischen) trotz der veränderten Situation ausgeführt. Experimente mit einäugigen Kröten zeigen, dass zweiäugige Fixierung nicht unbedingt notwendig ist für die Erkennung eines Beuteobjekts. Bei halbseitig blinden Tieren lässt sich die relative Eektivität einer Beuteattrappe also genau so messen wie bei normalen Kröten durch das Vorkommen von Orientierungsbewegungen. 1.2.1 Unterschiedliche Wertungen eines Reizes Während der Attrappen-Experimente zeichnete sich ab, dass Beute- und Feindschlüsselreize gewöhnlich zwei wichtige Erkennungsmerkmale aufweisen: Bewegung und Kontrast. Der Hauptunterschied zwischen Beute und Feind ist verständlicherweise abhängig von der Gröÿe. Kleine Objekte hauptsächlich am Boden sind potenziell Beute, wohingegen groÿe Objekte meistens in der Luft Feinde sind. Zuerst müssen die Gestalt-Parameter 1 VERHALTENSGRUNDLAGEN DER KRÖTE 5 bestimmt werden, welche mit einem Beute- bzw. einem Feindobjekt verbunden sind. Die Abbildung oben zeigt eine Versuchsanordnung für die Ermittlung der Eektivität einer Beuteattrappe. In dieser Versuchsanordnung wird eine Kröte in einen zylindrischen Glasbehälter gesetzt. Sie kann sich von einem Objekt, das sich in einer Entfernung von ca. 7 cm kontinuierlich um den Behälter bewegt, entfernen oder diesem durch aufeinanderfolgende Drehbewegungen folgen. Dadurch lässt sich die Eektivität einer Attrappe quantitativ messen. In der Zeichnung ist p das Beuteobjekt (prey ), D die eektive Verrückung der Attrappe im visuellen Feld und T der Drehwinkel der Kröte. 1.2.2 Form-Parameter Kröten antworten nur mit Beutefangverhalten auf Objekte, die sich mit einer bestimmten Geschwindigkeit bewegen. Auÿerdem spielt nicht nur die Ausdehnung des Objektes eine Rolle, sondern auch ihre Richtung. 1 VERHALTENSGRUNDLAGEN DER KRÖTE 6 Die obige Grak veranschaulicht mit dem Versuchsaufbau A, wie eektiv die rechteckigen Formen als Beuteobjekt für Kröten sind. Dabei wurden die Orientierungsbewegungen pro Minute von jedem einzelnen Tier in Verbindung mit einer der drei Attrappen mit der jeweiligen Ausdehnung in S-, V- und H- Richtung gemessen. Die durchschnittlichen Orientierungsbewegungen pro Minute sind auf der y-Achse aufgetragen, während die x-Achse die relativen Gröÿeneinheiten der jeweiligen Seitenlänge enthält. Bei der Seitenlänge 2 sind alle Objekte quadratisch und aufgrund ihrer geringen Gröÿe gleichwenig eektiv. Die Verlagerung eines schmalen Streifens in Richtung der Bewegung (Attrappe b) lässt die Beutefang-Aktivität zunehmen. In der Grak ist zu erkennen, dass eine Verlängerung der Seitenlänge H eine Eektivitätssteigerung zur Folge hat, die sich in der Vermehrung der durchschnittlichen Orientierungsbewegungen der Kröten bemerkbar macht. Diese Eektivitätssteigerung ist aber nur bis zu einem bestimmten maximalen Wert von bis zu ca. 35 Orientierungsbewegungen pro Minute zu beobachten. Sobald die relative Länge von H 16 übersteigt nehmen die Orientierungsbewegungen pro Minute sogar leicht ab. Die Attrappe b löst im Durchschnitt immer weniger Orientierungsbewegungen pro Minute aus, je gröÿer die Ausdehnung senkrecht zur Bewegungsrichtung wird. Mit zunehmender Seitenlänge V wird die Attrappe vollkommen uneektiv. Sobald die relative Gröÿe von 8 überschritten wird, reagieren einige Tiere sogar mit Fluchtverhalten. Bei quadratischen Objekten (Attrappe c) zeigt der Verlauf des Beutefangverhaltens eine Art Addition zwischen der horizontalen (beuteähnlichen) Komponente und der vertikal (hemmenden) Komponente. 1 VERHALTENSGRUNDLAGEN DER KRÖTE 7 Anhand der Ergebnisse kann man schlieÿen, dass die Ausdehnung des Objektes in Richtung der Bewegung eher einem Beuteobjekt entspricht, während Objektausdehnung in senkrechter Richtung der Bewegung den Auslösewert herabsenkt. Die folgende Grak zeigt besonders deutlich, dass nicht das Objekt selbst das Beutefangverhalten auslöst, sondern seine Form. Wurmähnliche Objekte sind für Kröten besonders attraktiv, wird aber dasselbe Objekt aus der Horizontalen um 45◦ senkrecht gedreht, sinken die Drehbewegungen pro Sekunde von anfänglich ca. 45 Drehungen auf nur noch 10 Drehbewegungen pro Sekunde ab. Steht der Streifen senkrecht, ist er als Beuteobjekt uneektiv. There are no worms walking on their heads for toads. Wird er aber in die Ausgangslage gebracht, passt er wieder optimal in das Formmuster Beute. 1.2.3 Sehvermögen Kröten zeigen das sogenannte ϕ - Phänomen, sie sind im Rahmen des Beutefangverhaltens nicht in der Lage eine richtige Reizbewegung von einer augenscheinlichen Bewegung zu unterscheiden. Experimente zeigten, dass die optimale Winkelgeschwindigkeit für das Beutefangverhalten zwischen 10 und 20 cps ( ... per secend?) liegt. Dies stimmt mit entsprechenden elektrophysikalischen Entdeckungen der Klasse II Ganglionen in der Netzhaut der Frösche überein (dies wird im Kapitel 2 noch genau erläutert). Dies zeigt, dass die Veränderlichkeit der Bedeutung eines Reizes nicht von der Kontinuität der Bewegung abhängt, sondern von der Änderung seiner Position. 1.2.4 Reiz-Hintergrund-Kontrast Um zu erforschen, welche Rolle der Kontrast eines Objektes für Kröten spielt, wurden für die folgenden Experimente quadratische Attrappen benutzt. Diese 1 VERHALTENSGRUNDLAGEN DER KRÖTE 8 sind an sich als Beute nicht so eektiv, daher kann der Kontrast ohne störenden Einuss der Form, als isolierter Parameter für das Beute-ErkennungsSystem der Kröte untersucht werden. Bei Verwendung von weiÿen Quadraten auf schwarzem Hintergrund zeigten die Tiere wesentlich mehr Orientierungsbewegungen pro Minute als bei Verwendung von schwarzen Objekten gleicher Gröÿe, die sich auf weiÿem Hintergrund bewegten. Einige Kröten zeigten keinerlei Antwort, wenn ihnen ein schwarzes Quadrat oder sogar ein schwarzer, horizontaler Streifen angeboten wurde. Der Einuÿ der Gröÿe B)a wird von dem Kontrast kaum beeinusst. Da Kröten hauptsächlich während der Dämmerung und in der Nacht aktiv sind, wurden die Forschungen auf schwarz-weiÿe bewegliche Muster beschränkt. 1.2.5 Saisonabhängigkeiten Während der Sommerzeit sind weiÿe Objekte, die sich auf schwarzem Hintergrund bewegen, sehr viel eektivere Auslöser des Beutefang-Verhaltens, als Schwarze Objekte auf weiÿ. Im Winter ändert sich dies jedoch. Überraschenderweise bleibt die Antwort auf schwarze Objekte konstant, aber die Reizantwort auf weiÿe Objekte sank noch unter diese. Ein Erklärungsversuch kann in dem Aufbau der Vegetation während der unterschiedlichen Jahreszeiten gesucht werden. Im Sommer ist die Vegetation im Lebensraum der Kröte meist hoch gewachsen und lässt 1 VERHALTENSGRUNDLAGEN DER KRÖTE 9 weniger Licht durch, so dass helle Objekte sich stark vom Hintergrund abheben. In der Zeit vom Herbst bis zum Winter wird die Vegetation niedriger und lichter, dann heben sich die hellen Objekte nicht mehr so stark ab. Diese Experimente zeigen, dass die Auswertung der visuellen Welt der Kröte durch das Jahr hindurch nicht konstant ist. 1.2.6 Motivation Der Auslösewert einer Attrappe hängt auch von der Motivation des jeweiligen Tieres ab. Es war möglich, während der Experimente die Motivation einer Kröte zu steigern, wenn ein bestimmter bekannter Geruch wahrgenommen wurde (z. B. von Mehlwurmexkrementen). Einige Tiere wurden mehrmals während der Fütterung diesem Geruch ausgesetzt. Derartig selbsttrainierte Kröten reagierten, angereizt durch den Geruch, auch auf Objekte, dessen Form eigentlich nicht in die Kategorie Beute passt. Bild a) zeigt die Reaktionskurve von Kröten bei Präsentation unterschiedlich groÿer Scheiben. Die Pfeile kennzeichnen die Motivationssteigerung bei Zuführen des anreizenden Geruchs. Besonders bei eigendlich zu groÿen Scheiben macht sich der Einuss des zusätzlichen Reizes stark bemerkbar. Im Bild b) ist das Ergebnis desselben Versuchs mit einer anderen Attrappe festgehalten. Ohne den Geruch hat der senkrechte Streifen annähernd keine Wirkung. Wird aber der Geruch zugeführt steigt die Anzahl der 1 VERHALTENSGRUNDLAGEN DER KRÖTE 10 Orientierungsreaktionen pro Minute auf das fast Vierfache und noch mehr an. Die Entscheidungsfähigkeit des Visuellen-Erkennungs-Systems dieser Kröten hat sich oensichtlich verändert. 1.2.7 Gewöhnungseekte Wenn eine Kröte einer langfristigen Reizserie mit derselben Beuteattrappe ausgesetzt wird, lässt ihre Beutefangaktivität nach. Die Kröte gewöhnt sich an den Reiz. Der Grund für die Abnahme kann die reizspezische Nachwirkung sein, die sich während der aufeinanderfolgenden Reizung ansammelt. Reizspezisch meint, dass die Gewöhnung an eine Form A unabhängig ist von einer anderen Form B. Während einiger anderer Experimente stellte sich heraus, dass für Kröten eine ausgewählte Gewöhnung möglich ist, nämlich bei Stimulierung einer spezischen Gegend auf der Netzhaut (lokalspezisch), was im Laufe dieses Referates noch einmal erwähnt wird. Auÿerdem zeigen diese Versuche, dass das visuelle System der Kröten in der Lage ist Informationen (Nachwirkungen) für gewisse Zeit zu lagern. Grak A) zeigt die Abnahme der Drehbewegungen pro Minute bei wiederholter Präsentation einer wurmähnlichen Beuteattrappe. Grak B) beschreibt die Zunahme der Eektivität der Attrappe nach der Gewöhnung als eine Funktion des Interstimulus Intervals. Das Verhältnis R0 E = R0t wird wiederholt gemessen. ( R00 ist die Anzahl der 0 Orientierungsbewegungen binnen einer Reizserie, die bis zur Gewöhnung vorkommen; Rt0 gibt die Anzahl der Antworten bis zu Gewöhnung an, die nach einer Wiederherstellungspause folgen). 1 VERHALTENSGRUNDLAGEN DER KRÖTE 11 Wenn man einen Reiz innerhalb von einminütigen Intervallen präsentiert, stellt sich schon nach relativ wenigen Reizserien eine Gewöhnung ein. Dies geht so weit, dass die Attrappe nach ca. 5-7 Reizserien uneektiv wird. Wird dieser Reiz im Abstand von 5 min vorgeführt, dauert es schon wesentlich länger bis der gleiche Wert der Gewöhnung erreicht wird. Aber selbst bei der wiederholten Reizung nach jeweils 24 Stunden zeigt die Kröte noch Gewöhnungseekte. Zwar sind diese weniger deutlich, zeigen aber, wie leistungsfähig das Visuelle-Erkennungs-System der Kröten ist. Dieses quantitative Ergebnis liefert die Grak C). Grak D) zeigt den Eekt von Gehirnverletzungen in Bezug auf die Gewöhnung. 1.3 Schlüsselreiz Feind Abhängig von der Gestalt eines Räubers und seinem Standort im visuellen Feld wurden folgende Reizantworten beobachtet: 1. ducken, springen (Feind aus der Luft) 2. wegdrehen, rennen (Feind am Boden) 1 VERHALTENSGRUNDLAGEN DER KRÖTE 12 1.3.1 Form-Parameter Wichtig für den Schlüsselreiz, der das Fluchtverhalten auslöst, ist auÿer der Gröÿe noch die teilweise Ausbreitung senkrecht zur Bewegungsrichtung. Wenn schwarze Scheiben verschiedener Gröÿe in einer Entfernung von ca. 10 cm durch das Sichtfeld am Rücken der Kröte bewegt werden, stellt man fest, dass solche mit 50 Einheiten Durchmesser eine maximale Fluchtaktivität auslösen. Kleinere oder gröÿere sind weniger eektiv. Identische maximale Auslösewerte können mit folgenden Mustern erreicht werden: 1. einem 10 Einheiten breiten Ring mit 50 Einheiten Durchmesser; 2. einem Vier-Punkte-Muster mit einem Punktdurchmesser von 10 Einheiten und einem Abstand von 30 Einheiten zwischen benachbarten Punkten. 1 VERHALTENSGRUNDLAGEN DER KRÖTE 13 Die Fluchtaktivität kann bei weiterer Vergrösserung des Durchmessers nicht weiter erhöht werden, aber sie kann abnehmen. Wird ein horizontaler Streifen in einer Entfernung von 7 cm bewegt, stellt er ein optimales Beuteobjekt dar. Fügt man diesem Streifen an einem Ende ein Quadrat mit einer Zwischenreizdistanz von über 10 Einheiten hinzu, stellen die meisten Tiere ihr Beutefangverhalten ein. Einige Kröten zeigen sogar Fluchtverhalten. Während der Verhaltensstudien der letzten Jahre an natürlichen Feinde der Kröte, erschien ein ähnliches Muster in Gestalt einer Schlange. Das Quadrat stellt dabei den Kopf dar und der Streifen den Rest des Körpers. Auÿerdem ist es interessant zu beobachten, dass das gleiche Feind-Muster auf sich an Land bewegende Blutegel zutrit. Blutegel heben zeitweise ihren Saugrüssel senkrecht zur Bewegungsrichtung, was die Kröten in ihrem Beutefangverhalten hemmt; wird der Rüssel jedoch gesenkt, wird die Kröte zuschnappen. 1.3.2 Geschwindigkeit- und Kontrast-Parameter Wenn die Parameter für Gröÿe und Kontrast einer Beuteattrappe konstant gehalten werden, nimmt die Fluchtaktivität R zu, wenn die Winkelgeschwindigkeit v erhöht wird: R = k3 v γ (Fluchtantwort) (richtig für 1 ≤ v ≤ 50LE ) sec lösen keine Beute- sowie Feindobjekte, die sich schneller bewegen als 100LE sec Reaktionen aus. Dies gibt möglichen Beuteobjekten eine vergröÿerte Chance zu überleben; z. B. erweckt eine Schabe selten die Aufmerksamkeit der Kröte: Sie bewegt sich einfach zu schnell. Eine Schnecke hingegen ist zu langsam. Sooder schneller als bald also ein Beute- oder Feindobjekt langsamer ist als 1LE sec 100LE ist der Reiz ineektiv. Eine weiterer Parameter, der wichtig ist für das sec 1 VERHALTENSGRUNDLAGEN DER KRÖTE 14 Auslösen von Fluchtbewegung, ist die Objektbewegung in der z-Achse zum Krötenauge. In gewissen Grenzen ist dieser Eekt unabhängig von der Gröÿe des bewegenden Objekts. Bewegt sich z. B. eine Riesenameise (Componotus herculeanus L.) in Richtung der z-Achse zum Auge hin, löst sie Fluchtverhalten aus. Kreuzt sie jedoch das visuelle Feld der Kröte, signalisiert sie Beute und löst das Beutefangverhalten aus. Bei wiederholter Reizung der Kröte mit einem Feindobjekt nimmt die Fluchtaktivität auch ab. Verglichen mit dem entsprechenden Eekt während des Beutefangverhaltens braucht das Wiedererlangen nach der Gewöhnung nicht mehr als 30 60 min. 1.3.3 Schlussfolgerungen Kröten zeigen zwei Arten von gegenläug visuell geleitetem Verhalten: • Näherkommen oder Orientieren zum Beuteobjekt und • Flucht vor einem Feind oder Räuber Beute- und Feindschlüsselreiz, die diese angeborenen Verhaltensmuster auslösen, haben zwei gemeinsame Kennzeichen: Bewegung und Kontrast; aber sie unterscheiden sich grundsätzlich in ihrer Gröÿe. In der Beuteerkennung scheinen Oberächenkomponenten eine wichtige Rolle zu spielen. Objekte mit Ausdehnung in horizontaler Richtung der Bewegung signalisieren Beute, während Ausdehnung aufrecht zu der Bewegungsrichtung den Auslösewert herabsenkt und Grundzüge für Feindobjekte signalisiert. Das Beute-Feind-Erkennungs-System kann motivations- und saisonabhängig verändert werden. Kröten haben die Fähigkeit ausgewählte Information von verschiedenen komplexen Mustern mittels einzelner Projektionen auf die Netzhaut als Ergebnis eines lokalen und spezischen Gewöhnungseektes zu lagern. 1 VERHALTENSGRUNDLAGEN DER KRÖTE 15 1.4 Elektrische Punktstimulation Elektrische Punktstimulation des Gehirns von freibeweglichen Kröten, a c, drei halbe Gehirnsektionen; on : optischer Nerv; T : Telencephalon; D : Diencephalon; M : Mesencephalon; th : rückwertiger Posterior Thalamus; v : Ventriculum; p : Pretectal Region; te : Optisches Tectum. 1 VERHALTENSGRUNDLAGEN DER KRÖTE 16 Die Information die von einem Auge kommt, wird hauptsächlich in gegenläugen Leitungen des optischen Nervs in die zwei Gehrinregionen: Optic Tectum und Thalamus-pretectal Region weitergeleitet. Während der Experimente wurden diese Strukturen im Gehirn von freibeweglichen Kröten mit implantierten Elektroden gereizt. Diese Art des Auslösens von Bewegungsantwort in Beziehung mit den Ergebnissen, die aus den Verletzungsexperimenten gezogen werden können geben Aufschluss über die Bedeutung für das Verhalten dieser Gehirnregionen. 1.4.1 Beutefangverhalten Während der Punktstimulation in verschiedenen Regionen mit einer Reihe von Wellenimpulsen antworten Kröten mit Bewegungsmustern der Beutefangsequenzen 1) 5) wie in 1.2 beschrieben. Das visuelle Feld ist dreidimensional durch zwei Winkel beschrieben. Bis über den Rücken der Kröte geht der Winkel bis zu 90◦ und horizontal um die Kröte herum reicht der zweite Winkel bis zu 120◦ . So lässt sich der Aufenthaltsort eines Objektes im visuellen Feld durch zwei Winkel genau bestimmen. Die Grak daneben stellt ein Modell der Vorderhirnregion einer Kröte dar. Die Schnitte a c durch das Mesencephalon stimmen mit den halben Sektionen in den Bildern A) C) überein. Die Reihe A) der Grak auf der vorangehenden Seite zeigt die Abschnitte, die Orientierungsbewegungen auslösen. Die Reizung eines Punktes in dem optischen Tectum (Buchstaben A I) leitet eine Bewegungsantwort auf genau einen Teil des visuellen Feldes, das dem Plan der Netzhaut entspricht. Es ist auällig, dass Punkte, die im visuellen Feld nahe beieinander liegen auch, im Gehirn meist dicht beieinander anzutreen sind. Man könnte sagen, dass das visuelle Feld als biologischer Plan im Gehirn festgehalten ist. Die Reihe B) zeigt die zu reizenden Punkte, die das Beutefangverhalten auslösen. Die meisten solcher Punkte lassen sich in der Gehirnsektion c im Bereich der Punkte H und I (siehe Reihe A) nden. Verglichen mit dem visuellen Feld stimmt das mit Objekten überein, die sich nah am Boden bewegen. Die letzte Reihe C) enthält schwarz- und nur halbausgefüllte Punkte. Die schwarzen Kreise zeigen, welche Regionen im Gehirn gereizt werden müssen, um das Fluchtverhalten auszulösen, wobei auällt, dass diese gehäuft im Bereich der Punkte auftreten, die sich im visuellen Feld sehr hoch oben oder am Rande des Feldes benden. Die halbausgefüllten Kreise können bei Reizung das Fluchtverhalten oder das Beutefangverhalten auslösen. Während einiger Experimente war es auch möglich, elektrische und visuelle Reize zu verbinden. Bei einäugigen Kröten war die Zeit zwischen der 1 VERHALTENSGRUNDLAGEN DER KRÖTE 17 anfänglichen Beutexierung und der folgenden Schnappreaktion nahezu verdoppelt im Vergleich mit normalen Tieren. Immer wenn das Schnappgebiet im blinden Tectum der einäugigen Tiere unterhalb der Schwelle eines visuellen Beuteobjektes elektrisch stimuliert wurde, verhielten sich die Kröten jedoch normal. 1.4.2 Fluchtverhalten Die unterschiedlichen Fluchtverhaltensweisen können hauptsächlich durch Reizung des Posterior Thalamic (T) und der Pretectal-Regionen (P) hervorgerufen werden. Wie schon erwähnt war es möglich durch Stimulation von einigen Punkten in der Region zwischen TP-Region und Rostral Tectum beide Verhaltensweisen, jenes für Flucht und für Beute, auszulösen. 1.4.3 Gewöhnungseekte Auch bei der Stimulation mit elektrischen Reizen treten Gewöhnungseekte auf. Während der Studien des Fluchtverhaltens war es interessant zu beobachten, dass beide Stufen die der Gewöhnung und die des Wiedererlangens beinahe denselben Zeitverlauf zeigten wie bei der visuellen Stimulation mit einer Feindattrappe. 1.4.4 Schlussfolgerungen Von der Gehirnstimulation und entsprechenden Verletzungsexperimenten kann geschlossen werden, dass das Optic Tectum hauptsächlich das Beutefangverhalten auslöst, während die Rostral Strukturen in der Thalamicpretectal(TP) Region für das Fluchtverhalten zuständig sind. Verletzungsexperimente oenbaren neue Einsichten in die zentralen Interaktionsmechanismen, die das Beutefang- und das Fluchtverhalten kontrollieren. Es ist denkbar, dass der Tectal-Beutefang-Auslösemechanismus hemmende Einüsse von der TPRegion bekommt, welche selbst ein Auslösesystem für Fluchtverhalten enthält oder ein Teil davon ist. Das Vorderhirn steuert vermutlich die Aktivität beider Systeme mit hemmenden Wegen zur TP-Region. Eine natürliche Funktion des Vorderhirns ist die Demonstration der Förderung des Beutefangverhaltens durch Beutegeruch. Nach der Entfernung des Vorderhirns scheint der hemmende Einuÿ der TP-Region, das Tectal-Beutefang-Auslösesystems zu beherrschen. Wird im Folgenden eine TP-Verletzung zugefügt, ist das Beutefang-Auslöse-System ungehemmt. Ähnlichkeiten zwischen dem Verlauf der Gewöhnung bei visueller und bei elektrischer Stimulation, lassen annehmen, dass die gereizten Gehirngebiete 2 NERVENZELLEN DER KRÖTE 18 Teil des Senso-Motor-Systems sind. Auf diese Weise ist es möglich Information von visuellen und elektrischen Reizen aufzusummieren oder zu lagern. 2 Nervenzellen der Kröte 2.1 Aufbau der Nervenzelle Alle Nervenzellen eines Wirbeltieres, auch Neuronen genannt, haben prinzipiell den gleichen Aufbau. Sie bestehen aus einem Zellkern, der von einem Zellkörper umgeben ist. An dessen Oberäche benden sich die sogenannten Dendriten (griech.: dendros; baumartig, verzweigt, verästelt). Über diese gelangen elektrische Signale in die Zelle. Alle Dendriten einer Zelle zusammen, ergeben das sogenannte Empfängerfeld. Es gibt ein erregendes (ERF) und ein hemmendes (IRF) Empfängerfeld. Ob eine Reaktion auf einen Reiz ausgelöst wird bestimmt die Summe der beiden Empfängerfelder. Bei der Kröte ist das ERF rundlich und vom IRF umgeben. An einem Ende der Zelle bendet sich der Axonhügel. In diesem Punkt beginnt das Axon. Dieses leitet die empfangenen Signale weiter an die synaptische Endigungen, auch Endknöpfchen genannt. Diese benden sich jeweils an der Spitze einer der vielen Verästelungen, in denen das Axon endet. Das Axon ist nicht immer gleich lang und kann sogar über einen Meter lang sein. Es ist meist von einer Myelinscheide umgeben. Diese besteht aus Schwann'schen Zellen, die durch Ranvier-Schnürringe verbunden sind. Die Myelinscheide dient dem Schutz des Axon's. Die Signale werden von dort auf ein anderes Neuron oder eine andere Zelle übertragen. Die Neuronen, welche die Kröte zum Sehen benötigt, liegen in der Netzthaut, dem hinteren Thalamus und der Pretectal-Region, beziehungsweise im Tectum Opticum (Mittelhirndach). Insgesammt hatte das Gehirn ursprünglich drei Bereiche, das Vorderhirn, das Mittelhirn und das Rautenhirn. Im Vorderhirn enstand das Groÿhirn und der Thalamus, im Mittelhirn das Optic Tectum und im Rautenhirn das Kleinhirn und die Medulla oblongata. 2 NERVENZELLEN DER KRÖTE 19 2.2 Die verschiedenen Neuronentypen 1. Netzhaut Hier gibt es drei verschiedene Typen von Nervenzellen. Sie entsprechen den Typen II, III, IV beim Frosch. Diese Zellen begrenzen in spezischen Schichten die Oberäche des Tectum Opticum. Die Neuronen der Klasse II liegen direkt unter der Oberäche des Tectum Opticum. Darunter benden sich die Zellen der Klasse III und darunter, die der Klasse IV. 2 NERVENZELLEN DER KRÖTE 20 Wie die Reaktion auf einen Reiz aussieht, hängt von vielen Faktoren ab. so hängt z. B. die schwarz-weiÿe nervliche Priorität von der Stelle an der das ERF sitzt, der Reizgröÿe aber auch von der Jahreszeit ab. Eine besonders hohe Variabilität zeigen die Nervenzellen der Klasse II. So reagieren Zellen mit einenm ERF in der unteren Hälfte des visuellen Feldes eher auf weiÿe Quadrate auf schwarzem Hintergrund, für Objekte zw. 1◦ und 4◦ . Dagegen reagieren Nerven mit einem ERF in der oberen Hälfte des visuellen Feldes eher auf schwarze Objekte auf weiÿen Hintergrund, zw. 4◦ und 16◦ Entfernung. 2. Hinterer Thalamus und Pretectal-Region Diese beiden Regionen werden zusammengefasst, da sie so dicht nebeneinander liegen, dass man sie bei physiologischen Experimenten nicht auseinander halten kann. In diesem Teil des Gehirns gibt es neun verschiedene Typen an Neuronen. a) Dunkelheits sensitive Einheiten. Hierbei reagieren einige Zellen auf Licht und andere auf die Dämmerung. b) Einheiten, die sensitiv gegenüber stillstehenden Objekten sind. c) Bewegungssensitive Klein-Feld-Einheiten. Sie reagieren am besten bei groÿen, dunklen, bewegten Objekten vor hellem Hintergrund. Sie beziehen sich immer nur auf ein Auge und haben ein rundes ERF von 46◦ Durchmesser. d) Groÿe-Feld-Einheiten. Sie beziehen sich auf das gesamte visuelle Feld. e) Gedächniseinheiten. f) Einheiten mit Sensitivität gegenüber bewegten Objekten in der zAchse. g) Einheiten mit wechselnder ERF Gröÿe. Dies sind Varianten von c) und d). Z. B. können einige von ihnen ihre Gröÿe entlang der horizontalen oder vertikalen Achse verdoppeln. h) Einheiten mit selektiver Reaktion auf taktile Reize auf der Haut. Z. B. bei Bewegungen auf der Haut. i) Einheiten mit selektiver Reaktion zum Körperschwank. Also zum Schwanken des Körpers, durch Wind oder ähnliches. Insgesamt kann man sagen, dass viele dieser Nerven von Reizen aktiviert werden, welche ein Meidungsverhalten zur Folge haben. So z. B. das Wegdrehen von einem bedrohlichen Objekt (Typen c und f) oder das Ausführen einer Umwegbewegung (Typ b). 3 EINFÜHRUNG IN DIE GESCHICHTE DER NEURONALEN NETZE (NN)21 3. Tectum Opticum Hier gibt es nur drei verschiedene Typen. a) Bewegunsspezische mit einem ERF von 27◦ Durchmesser. Sie benden sich in der grauen Schicht (stratum griseum) und in der weiÿen Zentrale (album zentrale). b) Bewegunsempndliche mit groÿem RF. Hier wird noch mal zwischen drei Typen unterschieden: Neuron des Typ 1 bedecken das ganze vordere visuelle Feld. Die des Typ 2 das untere und die des Typ 3 die Gegenseite des visuellen Feldes. Man glaubt die Neuronen dieses Typs lokalisieren groÿ Objekte in allen Nerventypen. Wenn alle Neuronen gleichzeitig aktiviert werden bewegt sich das Objekt genau über den Fixpunkt. c) Subtectale und tegmentale Typen unter der dritten Hirnkammer. Sie bekommen noch zusätzliche Inputs von andere Sinnen. Dadurch wird die Reaktionsschwelle und die Wachsamkeit beeinuÿt. Wie man sieht, ist das Umsetzen, des Bildes kein einfacher Prozess sondern im Gegenteil ist er sehr komplex. Das Gehirn benönigt sehr viele Neuronen um dieses Bild umsetzen zu können. 3 Einführung in die Geschichte der Neuronalen Netze (NN) 3.1 Die erste Theorie der Neuronalen Netze Das erste NN wurde 1873 von Alexander Bain in seinem Buch Mind and Body. The Theories of Their Relation vorgestellt. Darin beschrieb Bain Speicher beziehungsweise Erinnerung als eine Anzahl Nervenströme deren Stärke schwächer ist als die Nervenströme, die vom Original-Stimulus ausgelöst werden. Dies prägte später die Vorstellung der Engramme als Speicherform der Erinnerung. Für Bain brauchte jede spezische Erinnerung eine Assoziation oder Verknüpfung, um auf diese Art und Weise repräsentiert zu werden. Demnach hätte aber jede mögliche Assoziation oder Gruppierung im Gehirn fest-verdrahtet werden müssen, was einen recht erheblichen Aufwand mit sich gebracht hätte. 3 EINFÜHRUNG IN DIE GESCHICHTE DER NEURONALEN NETZE (NN)22 Bain's Schwellenwert-Logik. Die Input-Signale werden an den Knotenpunkten summiert. Das Output-Signal hängt demnach von der Verschaltung ab. Bain's Vorschlag zur Signal-Abschwächung. Jeder Knoten hat einen bestimmten Widerstand, so dass die Signalstärke von der Wegstrecke abhängt. (beide Abbildungen aus Bain - 1873, wieder abgedruckt in Wilkes and Wade - 1997) 3 EINFÜHRUNG IN DIE GESCHICHTE DER NEURONALEN NETZE (NN)23 3.1.1 Erste Neur(on)ale Logik (1938 bis 1943) 1938 schlug Rashevsky vor, dass das Gehirn um binäre logische Operationen herum organisiert sein sollte (Aktionspotenziale als 1 oder true). Darauf aufbauend entwickelte er einfache Schaltbilder, in denen er die Nervenimpulse mit Bool'schen Verknüpfungen verband. Allerdings stellte sich auch hier bald heraus, dass die eigentlichen Abläufe im Gehirn wohl doch wesentlich komplizierter sein mussten und man sie mit solchen, verhältnismäÿig einfachen Modellen nicht simulieren konnte. Rasevskys Exklusives Oder (XOR) 3.1.2 Weitere Entwicklung bis heute Im weiteren Verlauf der Entwicklung von NN und Künstlicher Intelligenz ist eine zunehmende Verkomplizierung der Modelle, aber auch bessere Repräsentation des Originals (des Gehirns) zu beobachten. Allerdings bleibt die Variabilität und Flexibilität des natürlichen Vorbildes bislang unerreicht. Basis zu neueren NN Modellen bilden z.B. Wichtungen (Fuzzy Logic) und verschiedene Assoziationen (z. B. : Feedback) zwischen den In- und Outputs. 3.2 Beschreibung des Modells Das System besteht aus zweidimensionalen NN, wobei die Neuronen untereinander durch Inhibition (Hemmung) und Facilitation (Erleichterung), auch gruppenweise, verschaltet sind. Dadurch sollen die experimentellen Versuchsergebnisse mit Kröten sowohl funktional als auch strukturell interpretierbar und nachvollziehbar gemacht werden. 3 EINFÜHRUNG IN DIE GESCHICHTE DER NEURONALEN NETZE (NN)24 3.2.1 Charakteristika des Modells • Linearität, das heiÿt, dass die Ausrichtung der Zellen beziehungsweise Zellschichten aufeinanderfolgend ist • Homogenität in Bezug auf die untersuchte Region des Hirns ⇒ Abhängigkeit von Entfernung der Zellen untereinander, nicht ihrer Position (Gleichmäÿige Verteilung) • die dem System präsentierten Muster müssen groÿ genug sein ⇒ Abstände der Rezeptoren in der Retina lassen Mustererkennung erst ab einer gewissen Gröÿe zu • zeitlicher Einuss des Systems auf Signale unterscheidet sich für inhibitorische und facilitatorische Verschaltungen ⇒ durch Inhibition wird die Weiterleitung verzögert, durch Facilitation beschleunigt Das simulierte System unterscheidet sich vom echten (der Kröte) in einigen Punkten, allerdings kann man diesen Unterschied in etwa abschätzen und das Ergebnis entsprechend interpretieren. Dabei muss man speziell die unterschiedlichen physikalischen Eigenschaften der verwendeten Materialien berücksichtigen, als auch die geringere Komplexität des Modells gegenüber der Kröte. Um beispielsweise die Auswirkungen von Synapsen/Dendritenspezischen Zeitverzögerungen, die bei der Weiterleitung des Aktionspotenzials (AP) entstehen, zu modellieren, werden Low-Pass-Filter eingesetzt. 3.3 Aufbau des simulierten Systems 3.3.1 Komponenten Netzhaut Die Netzhaut ist wie beim Vorbild aus einem vier Schichten umfassenden NN aufgebaut. Die Zellen sind hier schon untereinander verknüpft und es ndet eine erste Bildverarbeitung statt. Diese beinhaltet z. B. das Filtern von Kontrastunterschieden und Translationsbewegungen. Tectum (Mittelhirndach) Das Tectum ist ein mehrere Schichten umfassendes, 2-dimensionales NN. Die Hauptaufgabe des Tectum, beziehungsweise des Modells, ist die feature extraction, zu Deutsch: Eigenschaftenextraktion. Anhand dieser kann ein Objekt dann klassiziert werden. Hierbei wurde festgestellt, dass die Nervensignale auf ein bewegtes Objekt stärker in der Bewegungsrichtung des Objekts als senkrecht dazu sind. Dies lässt darauf schlieÿen, dass das Tectum stark an der Bewegungsverarbeitung beteiligt ist. 3 EINFÜHRUNG IN DIE GESCHICHTE DER NEURONALEN NETZE (NN)25 Thalamus Prätectum Das TP erfährt zeitlich eine fast parallele Reizung mit dem Tectum. Dies lässt den Rückschluss zu, dass beide maÿgeblich an der Verhaltensreaktion der Kröte beteiligt sind. Ebenso wie das Tectum wird auch das TP als ein zweidimensionales NN simuliert. Die beiden möglichen Verhaltensantworten (Flucht- oder Beuteverhalten) werden von TP und Tectum zusammen ausgelöst, wobei das TP das Fluchtverhalten auszulösen scheint, während das Tectum haupsächlich für das Beutefangverhalten zuständig ist. Daraus kann man folgern, dass das TP-Signal subtraktiv mit dem Tectum gekoppelt ist, da es das Beutefangverhalten hemmen und sogar in Fluchtverhalten umwandeln kann. 3.3.2 Interaktionsmodell • Aus der Verbindung zwischen Tectum / TP - Transformationen und beobachtetem Verhalten kann man folgern: ⇒ Mit Sicherheit existieren weitere Vorverarbeitungsschritte als 2-dim. Interaktion der beiden Teile (Tectum / TP). ⇒ subtraktive Interaktion zwischen Tectum und TP wird impliziert durch einen Versuch mit entferntem TP (es wurde nur noch Beutefangverhalten beobachtet). • Existenz des Tectalen Typ 2 Neurons ⇒ Output korrespondiert mit Verhalten der Tiere. Der Schwellenwert (threshold) für bestimmte Verhaltensreaktionen wird durch mehrfach auftretende Impulse also das gleiche Muster welches man dem Tier präsentiert erreicht oder sogar überschritten. Allerdings tritt hier beim realen Vorbild eine Gewöhnung an den Reiz auf, die im Modell recht aufwändig simuliert werden muss. A LITERATURVERZEICHNIS 26 3.4 Schlussfolgerungen Eine Iteration der Parameter (Eingabewerte) führt zu unterschiedlichen Klassizierungen, obwohl die Verschaltung der Neuronen gleich bleibt. Die Kombination zweier Filteroperationen (Raum-/Zeitabhängig) durch eine zweidimensionale Dierenzoperation ermöglicht erst die Mustererkennung. Es existieren noch weitere unterschiedliche Mustererkennungssysteme, die über die bloÿe Beute-/Feinderkennung die hier erklärt wurde hinausgehen. Weiterhin bleibt allerdings oen, wie Entscheidungen von Neuronen gebildet beziehungsweise getroen werden, auch die Umsetzung in entsprechende Steuersignale ist weitestgehend noch zu erforschen. A Literaturverzeichnis The Visual System of the Toad: Behavioral and Physiological Studies on a Pattern Recognition System by J.-P. Ewert www.neurocomputing.org