Physik I Technische Hochschule Mittelhessen StudiumPlus
Werbung

Physik I
Wintersemester 2014 / 2015
für Studierende
des Studiengangs
Ingenieurswesen
1
Technische Hochschule Mittelhessen
StudiumPlus
Wetzlar
ii
1
Die Grafik der Titelseite wurde entnommen aus [Stoecker2000].
Inhaltsverzeichnis
Abbildungsverzeichnis
xi
Tabellenverzeichnis
xiii
1 Einleitung
1.1
1.2
1
Grundgrößen . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1.1.1
Größenordnungen . . . . . . . . . . . . . . . . . . . . . . .
3
1.1.2
Skalare und vektorielle Größen . . . . . . . . . . . . . . . .
3
1.1.3
Zeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.1.4
Länge . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
Fundamentale Rechengesetze . . . . . . . . . . . . . . . . . . . . .
5
1.2.1
Vektorgesetze . . . . . . . . . . . . . . . . . . . . . . . . .
5
Skalarprodukt . . . . . . . . . . . . . . . . . . . . . . . . .
6
Vektorprodukt
. . . . . . . . . . . . . . . . . . . . . . . .
6
Ableitungsregeln . . . . . . . . . . . . . . . . . . . . . . .
7
Potenzregel . . . . . . . . . . . . . . . . . . . . . . . . . .
7
Ableitung von Sinus, Kosinus und ln . . . . . . . . . . . .
7
Produktregel . . . . . . . . . . . . . . . . . . . . . . . . .
7
Kettenregel . . . . . . . . . . . . . . . . . . . . . . . . . .
7
1.2.3
Der Gradient . . . . . . . . . . . . . . . . . . . . . . . . .
8
1.2.4
Integrationsgesetze . . . . . . . . . . . . . . . . . . . . . .
8
Die Stammfunktion . . . . . . . . . . . . . . . . . . . . . .
8
Integration von Potenzfunktionen . . . . . . . . . . . . . .
8
Das bestimmte Integral . . . . . . . . . . . . . . . . . . . .
9
Integrieren von Sinus, Kosinus und 1/x . . . . . . . . . . .
9
Integration durch lineare Substitution . . . . . . . . . . . .
9
Integration durch Trennung der Variablen . . . . . . . . .
10
1.2.2
iv
Inhaltsverzeichnis
2 Klassische Mechanik
2.1
11
Kinematik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
2.1.1
Massepunkt . . . . . . . . . . . . . . . . . . . . . . . . . .
11
2.2
Geschwindigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
2.3
Beschleunigung . . . . . . . . . . . . . . . . . . . . . . . . . . . .
13
2.3.1
. . . . . . . . . . . . . . .
14
Der schräge Wurf . . . . . . . . . . . . . . . . . . . . . . .
15
2.4
Kreisbewegung . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
2.5
Galilei-Transformation . . . . . . . . . . . . . . . . . . . . . . . .
18
Transformation von Längen . . . . . . . . . . . . . . . . .
19
Transformation von Geschwindigkeiten . . . . . . . . . . .
20
Transformation von Beschleunigungen . . . . . . . . . . .
20
Newtonsche Dynamik . . . . . . . . . . . . . . . . . . . . . . . . .
21
2.6.1
Newtonsche Gesetze . . . . . . . . . . . . . . . . . . . . .
21
1. Newtonsches Axiom . . . . . . . . . . . . . . . . . . . .
21
2. Newtonsches Axiom . . . . . . . . . . . . . . . . . . . .
22
3. Newtonsches Axiom . . . . . . . . . . . . . . . . . . . .
23
Superpositionsprinzip . . . . . . . . . . . . . . . . . . . . .
23
Der Impuls . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
24
2.7.1
Die Raketengleichung . . . . . . . . . . . . . . . . . . . . .
24
Kräfte in der Natur und Technik . . . . . . . . . . . . . . . . . .
26
2.8.1
Gewichtskraft . . . . . . . . . . . . . . . . . . . . . . . . .
26
2.8.2
Gravitationskraft . . . . . . . . . . . . . . . . . . . . . . .
27
2.8.3
Drehmoment . . . . . . . . . . . . . . . . . . . . . . . . .
27
2.8.4
Hangabtriebskraft und Normalkraft . . . . . . . . . . . . .
28
2.8.5
Reibungskräfte . . . . . . . . . . . . . . . . . . . . . . . .
29
Strömungswiderstand - Luftwiderstand . . . . . . . . . . .
29
Haftreibung . . . . . . . . . . . . . . . . . . . . . . . . . .
29
Gleitreibungskraft . . . . . . . . . . . . . . . . . . . . . . .
30
Rollreibung . . . . . . . . . . . . . . . . . . . . . . . . . .
30
Seilreibung
. . . . . . . . . . . . . . . . . . . . . . . . . .
31
Trägheitskräfte in rotierenden Bezugssystemen . . . . . . .
33
Zentripetal- und Zentrifugalkraft . . . . . . . . . . . . . .
34
2.8.7
Federkraft - Hookesche Gesetz . . . . . . . . . . . . . . . .
36
2.8.8
Der Drehimpuls . . . . . . . . . . . . . . . . . . . . . . . .
38
2.6
2.6.2
2.7
2.8
2.8.6
Überlagerung von Bewegungen
Inhaltsverzeichnis
2.9
v
Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
39
2.10 Kinetische Energie . . . . . . . . . . . . . . . . . . . . . . . . . .
40
2.11 Potentielle Energie . . . . . . . . . . . . . . . . . . . . . . . . . .
41
2.11.1 Fluchtgeschwindigkeit . . . . . . . . . . . . . . . . . . . .
41
2.12 Der Energiesatz . . . . . . . . . . . . . . . . . . . . . . . . . . . .
42
2.13 Leistung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
43
2.14 Dynamik eines starren Körpers . . . . . . . . . . . . . . . . . . .
43
2.15 Der Schwerpunkt . . . . . . . . . . . . . . . . . . . . . . . . . . .
44
2.16 Wirkungsgrad . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
45
2.17 Stoßprozesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
46
3 Schwingungen
47
3.1
Harmonische Schwingungen . . . . . . . . . . . . . . . . . . . . .
47
3.2
Das Federpendel
. . . . . . . . . . . . . . . . . . . . . . . . . . .
48
3.3
Das Fadenpendel . . . . . . . . . . . . . . . . . . . . . . . . . . .
49
3.4
Das physikalische Pendel . . . . . . . . . . . . . . . . . . . . . . .
51
3.5
Die Torsionsschwingung . . . . . . . . . . . . . . . . . . . . . . .
52
3.6
Gedämpfte Schwingungen . . . . . . . . . . . . . . . . . . . . . .
53
3.7
Erzwungene Schwingungen . . . . . . . . . . . . . . . . . . . . . .
56
3.8
Wellen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
61
3.8.1
62
Die Wellenfunktion einer harmonischen Welle . . . . . . .
4 Hydrostatik
65
4.1
Druck . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
4.2
Isotroper Druck . . . . . . . . . . . . . . . . . . . . . . . . . . . .
65
4.2.1
Kolbendruck und hydraulische Presse . . . . . . . . . . . .
66
4.2.2
Kompressibilität . . . . . . . . . . . . . . . . . . . . . . .
67
Der Schweredruck . . . . . . . . . . . . . . . . . . . . . . . . . . .
67
4.3.1
Manometer . . . . . . . . . . . . . . . . . . . . . . . . . .
67
4.3.2
Auftrieb - Das Prinzipn von Archimedes . . . . . . . . . .
68
4.3
5 Hydrodynamik
5.1
71
Ideale Strömung . . . . . . . . . . . . . . . . . . . . . . . . . . . .
71
5.1.1
Laminare Strömung . . . . . . . . . . . . . . . . . . . . . .
71
5.2
Kontinuitätsgleichung . . . . . . . . . . . . . . . . . . . . . . . . .
72
5.3
Bernoulli-Gleichung . . . . . . . . . . . . . . . . . . . . . . . . . .
73
vi
Inhaltsverzeichnis
5.3.1
Flüssigkeit in Ruhe . . . . . . . . . . . . . . . . . . . . . .
74
5.3.2
Horizontal fließende Flüssigkeit . . . . . . . . . . . . . . .
74
5.3.3
Saugeffekte . . . . . . . . . . . . . . . . . . . . . . . . . .
75
Wasserstrahlpumpe . . . . . . . . . . . . . . . . . . . . . .
75
Hydrodynamisches Paradoxon . . . . . . . . . . . . . . . .
75
5.4
Torricellisches Ausflussgesetz . . . . . . . . . . . . . . . . . . . . .
76
5.5
Auftrieb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
77
5.6
Innere Reibung . . . . . . . . . . . . . . . . . . . . . . . . . . . .
77
5.6.1
Laminare Rohrströmung - Gesetz von Hagen-Poiseuille . .
78
Turbulente Strömungen . . . . . . . . . . . . . . . . . . . . . . . .
79
5.7.1
Widerstandskraft . . . . . . . . . . . . . . . . . . . . . . .
79
Ähnlichkeitsgesetze . . . . . . . . . . . . . . . . . . . . . . . . . .
80
5.8.1
80
5.7
5.8
Kritische Reynoldszahl . . . . . . . . . . . . . . . . . . . .
6 Wärmelehre
6.1
83
Temperatur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
83
6.1.1
Thermometer . . . . . . . . . . . . . . . . . . . . . . . . .
84
6.1.2
Freiheitsgrade . . . . . . . . . . . . . . . . . . . . . . . . .
85
Wärme und Wärmeleitung . . . . . . . . . . . . . . . . . . . . . .
86
6.2.1
Wärmeleitung . . . . . . . . . . . . . . . . . . . . . . . . .
86
Elektrische Analogie . . . . . . . . . . . . . . . . . . . . .
87
6.2.2
Wärmedurchlasskoeffizient . . . . . . . . . . . . . . . . . .
89
6.2.3
Konvektion . . . . . . . . . . . . . . . . . . . . . . . . . .
90
6.2.4
Wärmestrahlung . . . . . . . . . . . . . . . . . . . . . . .
90
6.3
Wärmeleitungsgleichung . . . . . . . . . . . . . . . . . . . . . . .
91
6.4
Wärmekapazität . . . . . . . . . . . . . . . . . . . . . . . . . . . .
91
6.5
Anfangs- und Randbedingungen . . . . . . . . . . . . . . . . . . .
92
Anfangsbedingung . . . . . . . . . . . . . . . . . . . . . .
92
Randbedingung . . . . . . . . . . . . . . . . . . . . . . . .
92
6.6
Kinetische Gastheorie . . . . . . . . . . . . . . . . . . . . . . . . .
93
6.7
Zustandsgleichung idealer Gase . . . . . . . . . . . . . . . . . . .
94
6.8
Hydrostatische Grundgleichung . . . . . . . . . . . . . . . . . . .
95
6.9
Barometrische Höhenformel . . . . . . . . . . . . . . . . . . . . .
96
6.9.1
Atmosphärischer Druck bei linearen Temperaturverlauf . .
96
6.10 Das Gesetz von Boyle-Mariotte . . . . . . . . . . . . . . . . . . .
97
6.11 Das Gesetz von Gay-Lussac . . . . . . . . . . . . . . . . . . . . .
98
6.2
Inhaltsverzeichnis
vii
6.12 Das Gesetz von Charles
. . . . . . . . . . . . . . . . . . . . . . .
98
6.13 Der 1. Hauptsatz der Wärmelehre . . . . . . . . . . . . . . . . . .
98
6.13.1 Innere Energie . . . . . . . . . . . . . . . . . . . . . . . . .
98
6.13.2 Druckarbeit . . . . . . . . . . . . . . . . . . . . . . . . . .
99
6.14 Aggregatzustände . . . . . . . . . . . . . . . . . . . . . . . . . . .
99
6.14.1 Der Partialdruck . . . . . . . . . . . . . . . . . . . . . . . 100
6.14.2 Der Dampfdruck - die Koexistenz von Flüssigkeit und Dampf100
Sieden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Hygrometrie . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Verdampfungswärme . . . . . . . . . . . . . . . . . . . . . 101
6.14.3 Koexistenz von Festkörper und Flüssigkeit . . . . . . . . . 102
6.14.4 Koexistenz dreier Phasen . . . . . . . . . . . . . . . . . . . 102
6.14.5 Der kritische Punkt . . . . . . . . . . . . . . . . . . . . . . 103
7 Optik
105
7.1
Reflexion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
7.2
Brechung
7.3
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
7.2.1
Totalreflexion . . . . . . . . . . . . . . . . . . . . . . . . . 107
7.2.2
Prismen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
7.2.3
Dispersion . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Optische Instrumente . . . . . . . . . . . . . . . . . . . . . . . . . 109
7.3.1
Die Linse . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
7.3.2
Das Auge . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
Literatur
113
viii
Inhaltsverzeichnis
Abbildungsverzeichnis
1.1
Darstellung eines Vektor . . . . . . . . . . . . . . . . . . . . . . .
5
2.1
Abbildung eines Geschwindigkeitvektors . . . . . . . . . . . . . .
12
2.2
Darstellung einer dreidimensionalen Bewegung . . . . . . . . . . .
15
2.3
Darstellung des schrägen Wurfs . . . . . . . . . . . . . . . . . . .
15
2.4
Darstellung einer Kreisbewegung . . . . . . . . . . . . . . . . . .
16
2.5
Darstellung der Winkelgeschwindigkeit . . . . . . . . . . . . . . .
18
2.6
Darstellung der Galilei-Transformation . . . . . . . . . . . . . . .
19
2.7
Schematische Darstellung der Addition von Kräften . . . . . . . .
24
2.8
Schematische Darstellug einer Rakete . . . . . . . . . . . . . . . .
25
2.9
Impulserhaltung bei einer Rakete . . . . . . . . . . . . . . . . . .
26
2.10 Schematische Darstellung des Drehmoments . . . . . . . . . . . .
28
2.11 Schematische Darstellung der Hangabtriebskraft und der Normalkraft . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.12 Schematische Darstellung der Rollreibung
28
. . . . . . . . . . . . .
31
2.13 Schematische Darstellung einer Rolle . . . . . . . . . . . . . . . .
31
2.14 Schematische Darstellung der Kräfte bei der Seilreibung . . . . . .
33
2.15 Linearität beim Hookeschen Gesetz . . . . . . . . . . . . . . . . .
36
2.16 Abbildung verschiedener Federn . . . . . . . . . . . . . . . . . . .
37
2.17 Parallelschaltung zweier Federn . . . . . . . . . . . . . . . . . . .
37
2.18 Reihenschaltung zweier Federn . . . . . . . . . . . . . . . . . . . .
37
2.19 Schematische Darstellung zur Drehimpulserhaltung . . . . . . . .
38
2.20 Darstellung der Corioliskraft . . . . . . . . . . . . . . . . . . . . .
39
2.21 Schematische Darstellung des Schwerpunkts . . . . . . . . . . . .
45
3.1
Schematische Darstellung einer harmonischen Schwingung . . . .
47
3.2
Energiebilanz bei einem Federpendel . . . . . . . . . . . . . . . .
49
3.3
Schematische Darstellung eines Fadenpendels . . . . . . . . . . . .
50
x
Abbildungsverzeichnis
3.4
Schematische Darstellung eines physikalischen Pendels . . . . . . .
52
3.5
Schematische Darstellung einer Torsionsschwingung . . . . . . . .
53
3.6
Schematische Darstellung einer schwach gedämpften Schwingung .
55
3.7
Schematische Darstellung des aperiodischen Grenzfalls . . . . . .
56
3.8
Schematische Darstellung einer stark gedämpften Schwingung . .
57
3.9
Zeigerdiagramm: Abhängigkeit der Amplituden bei einer erzwungenen Schwingung
. . . . . . . . . . . . . . . . . . . . . . . . . .
58
3.10 Abhängigkeit der Amplitude von ω bei einer Erzwungenen Schwingung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
59
3.11 Abhängigkeit der Phasen von ω . . . . . . . . . . . . . . . . . . .
60
3.12 Schwingungsdauer und Wellenlänge einer harmonischen Welle . .
62
3.13 Ausbreitung einer Transversalwelle . . . . . . . . . . . . . . . . .
62
3.14 Schematische Darstellung einer Longitudinalwelle . . . . . . . . .
63
4.1
Schematische Darstellung des isotropen Drucks in Flüssigkeiten .
66
4.2
Schematische Darstellung einer hydraulischen Presse . . . . . . . .
66
4.3
Darstellung des hydrostatischen Paradoxons . . . . . . . . . . . .
67
4.4
Schematische Dartsellung eines Manometers . . . . . . . . . . . .
68
4.5
Schematische Darstellung der Auftriebskraft . . . . . . . . . . . .
68
4.6
Dichtebestimmung nach Archimedes
. . . . . . . . . . . . . . . .
69
5.1
Geschwindigkeitsprofil bei einer laminaren Strömung . . . . . . .
72
5.2
Darstellung der Kontinuität von Flüssigkeiten . . . . . . . . . . .
72
5.3
Abbildung zum Verständnis der Bernoulli-Gleichung . . . . . . . .
73
5.4
Schematische Darstellung eines Ventur-Rohrs . . . . . . . . . . . .
75
5.5
Schematische Darstellung einer Wasserstrahlpumpe . . . . . . . .
76
5.6
Schematische Darstellung zum Ausflussgesetz von Torricelli . . . .
77
5.7
Darstellung der Auftriebskraft bei einem Flügel . . . . . . . . . .
77
5.8
Schematische Darstellung einer laminaren Grenzschicht . . . . . .
81
6.1
Schematische Darstellung der Rotation eines zweiatomigen Moleküls 85
6.2
Schematische Darstellung der Wärmeleitung . . . . . . . . . . . .
87
6.3
Darstellung einer thermischen Reihenschaltung . . . . . . . . . . .
88
6.4
Dampfdruckkurve des Wassers . . . . . . . . . . . . . . . . . . . . 101
6.5
Sättigungskurve von Wasserdampf . . . . . . . . . . . . . . . . . . 102
6.6
Phasendiagramm von Wasser . . . . . . . . . . . . . . . . . . . . 103
Abbildungsverzeichnis
xi
7.1
Schematische Darstellung eines Spiegelbildes . . . . . . . . . . . . 105
7.2
Schematische Darstellung von Reflexion und Brechung . . . . . . 106
7.3
Das Berchungsgesetz nach Snellius
7.4
Schematische Darstellung der Brechung bei einem Prisma . . . . . 109
7.5
Dispersion bei einem Prisma . . . . . . . . . . . . . . . . . . . . . 109
7.6
Darstellung einer dünnen Linse . . . . . . . . . . . . . . . . . . . 110
7.7
Bildkonstruktion bei einer Lupe . . . . . . . . . . . . . . . . . . . 110
7.8
Strahlengang beim kurzsichtigen Auge . . . . . . . . . . . . . . . 111
7.9
Strahlengang beim weitsichtigen Auge
. . . . . . . . . . . . . . . . . 107
. . . . . . . . . . . . . . . 112
xii
Abbildungsverzeichnis
Tabellenverzeichnis
1.1
Übersicht Größenordnungen . . . . . . . . . . . . . . . . . . . . .
3
2.1
Übersicht cw -Werte . . . . . . . . . . . . . . . . . . . . . . . . . .
29
2.2
Übersicht einiger Trägheitsmomente . . . . . . . . . . . . . . . . .
44
3.1
Übersicht der Phasenlage bei einer erzwungenen Schwingung . . .
58
6.1
Wärmedurchgangskoeffizient verschiedener Baustoffe . . . . . . .
89
6.2
Wärmetransportwiderstand bei Wasser und Gasen . . . . . . . . .
90
1 Einleitung
1.1 Grundgrößen
Die Defintion einer physikalsichen Größe besteht in der Definition einer Messvorschrift. Die Messung einer physikalischen Größe erfolgt durch den Vergleich mit
einer Einheit.
Meter
Das Meter ist die Länge der Strecke, die Licht im Vakuum während der Dauer
von (1/299 792 458) Sekunden durchläuft.
Basisgröße Basiseinheit Symbol relative Genauigkeit
Länge
Meter
m
10−14
Kilogramm
Das Kilogramm ist die Einheit der Masse; es ist gleich der Masse des Internationalen Kilogrammprototyps.
Basisgröße Basiseinheit Symbol relative Genauigkeit
Masse
Kilogramm
kg
10−9
Sekunde
Die Sekunde ist das 9 192 631 770-fache der Periodendauer der dem Übergang
zwischen den beiden Hyperfeinstrukturniveaus des Grundzustandes von Atomen
des Nuklids Cs-133 entsprechenden Strahlung.
Basisgröße Basiseinheit Symbol relative Genauigkeit
Zeit
Sekunde
s
10−14
2
1 Einleitung
Ampere
Das Ampere ist die Stärke eines konstanten elektrischen Stromes, der, durch zwei
parallele, geradlinige, unendlich lange und im Vakuum im Abstand von einem
Meter voneinander angeordnete Leiter von vernachlässigbar kleinem, kreisförmigen Querschnitt fließend, zwischen diesen Leitern je einem Meter Leiterlänge die
Kraft 2 · 10−7 Newton hervorrufen würde.
Basisgröße
Basiseinheit Symbol relative Genauigkeit
Stromstärke Ampere
A
10−6
Kelvin
Das Kelvin, die Einheit der thermodynamischen Temperatur, ist der 273,16te Teil
der thermodynamischen Temperatur des Tripelpunktes des Wassers.
Basisgröße
Basiseinheit Symbol relative Genauigkeit
Temperatur
Kelvin
K
10−6
Mol
Das Mol ist die Stoffmenge eines Systems, das aus ebensoviel Einzelteilchen besteht, wie Atome in 0,012 Kilogramm des Kohlenstoffnuklids C-12 enthalten sind.
Bei Benutzung des Mol müssen die Einzelteilchen spezifiziert sein und können
Atome, Moleküle, Ionen, Elektronen sowie andere Teilchen oder Gruppen solcher
Teilchen genau angegebener Zusammensetzung sein.
Basisgröße
Basiseinheit Symbol relative Genauigkeit
Stoffmenge Mol
mol
10−6
Candela
Die Candela ist die Lichtstärke in einer bestimmten Richtung einer Strahlungsquelle, die monochromatische Strahlung der Frequenz 540 · 1012 Hertz aussendet
und deren Strahlstärke in dieser Richtung (1/683) Watt durch Steradiant beträgt.
Basisgröße
Basiseinheit Symbol relative Genauigkeit
Lichtstärke Candela
cd
5 · 10−3
Ein Beispiel für eine abgeleitete Größe ist die Geschwindigkeit [m/s].
1.1 Grundgrößen
3
Wichtig: Der Messvorgang darf die Messung nicht verfälschen. In subatomarer Physik ist dies häufig unvermeidbar.
Physikalische Größen können vom Betrag her sehr verschieden sein. So beträgt die
Wellenlänge des roten Lichts gerade 0,00000066 m während der Abstand zwischen
der Erde und der Sonne 150.000.000.000 m beträgt.
1.1.1 Größenordnungen
Um sehr große bzw. sehr kleine Größen übersichtlicher darzustellen, benutzt man
die Zehnerpotenzschreibweise.
In der technischen Notation werden als Exponenten ausschließlich ganzzahlige
Vielfache von 3 verwendet, also ganzzahlige Potenzen von Tausend. Diese Notation geht auf die Verwendung von Maßeinheiten ein, weil bei diesen die genormten
Größenordnungen (mikro, milli, kilo, Mega und so weiter) Potenzen von 103 entsprechen.
Peta
P
1015
milli
m
10−3
Tera
T
1012
mikro
µ
10−6
Giga
G
109
nano
n
10−9
Mega
M
106
pico
p
10−12
Kilo
k
103
femto
f
10−15
Tabelle 1.1: Übersicht Größenordnungen
1.1.2 Skalare und vektorielle Größen
Man unterscheidet zwischen skalaren und vektoriellen Größen.
Skalare Größen besitzen lediglich einen Betrag, z.B. sind die Zeit, die Temperatur
und die Energie skalare Größen.
Vektorielle Größen besitzen neben einem Betrag auch eine Richtung, in die sie
gerichtet sind, z.B. sind Längen, die Geschwindigkeit, die Beschleunigung und
4
1 Einleitung
die Kraft vektorielle Größen. Man macht eine vektorielle Größe mit Hilfe eines
Vektorpfeils~ kenntlich, z. B. ~v .
1.1.3 Zeit
Der physikalische Zeitbegriff beruht auf dem Vergleich mit periodischen Vorgängen.
Früher: 1 Sekunde entsprach dem 86400stel Teil der Rotationsperiode der Erde.
Da diese Schwankungen unterliegt, wurde diese Messvorschrift widerrufen. Tpische Periodendauern:
Lebensdauer Mensch
1010 s
Alter des Sonnensystems
1018 s
Erdrotation
105 s
Schallwellen
10−3
Radiowellen
10−6 s
Kernschwingung
10−21 s
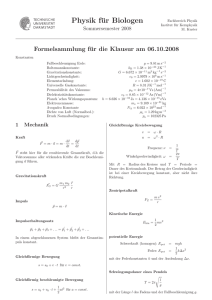
1.1.4 Länge
Als Länge ~a bezeichnet man den Abstand zwischen zwei Punkten. Die Länge ~a ist
daher einer vektorielle Größe. Sie besitzt neben einem Betrag auch eine Richtung.
Als Ortsvektor bezeichnet man einen Vektor dessen Anfang im Ursprung liegt.
Seine Spitze liegt in dem Punkt, der durch die Koordinaten des Vektors bestimmt
ist. Es gilt:
ax
~a = ay = ax e~x + ay e~y + az e~z
az
(1.1)
wobei e~x , e~y , e~z Einheitsvektoren in x-,y- und z-Richtung sind. Für den Einheitsvektor mit der Länge 1 gilt:
1
e~x = 0
0
(1.2)
Meßgeräte für die Bestimmung einer Länge in der Praxis:
Zollstock
≈ 1 mm
Schieblehre
≈ 1/10 mm
Mikrometerschraube
≈ 1/100 mm
Lichtmikroskop
≈ 1/1000 mmm
Elektronenmikroskop
≈ 1/1000000 mm
1.2 Fundamentale Rechengesetze
5
Abbildung 1.1: Darstellung eines Vektor [Stoecker2000]
Große Entfernungen misst man entweder durch Winkelmessung (Triangulation)
oder indirekt durch die Messung einer Laufzeit. So wird z.B. die Entfernung zum
Mond mit Hilfe der Laufzeit eines auf der Mondoberfläche reflektierten Laserstrahls bestimmt.
1.2 Fundamentale Rechengesetze
Im folgenden Abschnitt werden die wichtigsten Rechengesetze, die zu Beginn der
Physikvorlesung relevant sind, kurz rückblickend zusammengetragen.
1.2.1 Vektorgesetze
Für den Betrag des Vektors ~x gilt:
x p
|~x| = y = x2 + y 2 + z 2
z (1.3)
Multipliziert man ein Skalar c mit einem Vektor ~x so gilt:
c·x
c · ~x = c · y
c·z
(1.4)
6
1 Einleitung
Dies muss man sich als Streckung bzw. Stauchung des Vektors um den Faktor c
vorstellen.
Skalarprodukt
Für das Skalarprodukt von zwei Vektoren ~a und ~b gilt:
ax
bx
~
~a · b = ay · by = ax bx + ay by + az bz = |~a||~b| cos α
az
bz
(1.5)
Anwendung in der Physik
Definition der Arbeit: W = F~ · ~s
Man erhält als Ergebnis eine skalare Größe.
Vektorprodukt
Für das Vektorprodukt, auch Kreuzprodukt genannt, von zwei Vektoren ~a und ~b
gilt:
ay b z − az b y
bx
ax
~a × ~b = ay × by = az bx − ax bz
ax b y − ay b x
bz
az
(1.6)
Beim Vektorprodukt entsteht ein Vektor, der senkrecht auf der von den Vektoren ~a
und ~b aufgespannten Ebene steht. Der Betrag des Vektors gibt den Flächeninhalt
des durch die Vektoren ~a und ~b aufgespannten Parallelgrams an:
|~a × ~b| = |~a||~b| sin α
(1.7)
Der Winkel α gibt dabei den Winkel zwischen den Vektoren ~a und ~b an. Zusammenfassend gilt
~
~
~a × b = |~a||b| sin α ~n
wobei ~n der zu ~a und ~b senkrecht stehende Einheitsvektor ist.
Anwendung in der Physik
~ = ~r × F~
Für das Drehmoment gilt: M
Man erhält als Ergebnis eine vektorielle Größe.
(1.8)
1.2 Fundamentale Rechengesetze
7
1.2.2 Ableitungsregeln
Im folgenden werden kurz die wichtigsten Ableitungsregeln zusammengefasst:
Potenzregel
dxn
= nxn−1 , n ∈ Z\{0}
dx
(1.9)
(x3 )0 = 3x2
(1.10)
Beispiel
Ableitung von Sinus, Kosinus und ln
d
sin x = cos x
dx
d
cos x = − sin x
dx
d
1
ln x =
dx
x
(1.11)
(1.12)
(1.13)
Produktregel
f (x) und g(x) seien differenzierbare Funktionen. Dann folgt:
d
(f (x)g(x)) = f 0 (x)g(x) + f (x)g 0 (x)
dx
Beispiel
sin(x)x2
0
= cos(x)x2 + sin(x)2x
(1.14)
(1.15)
Kettenregel
f (x) und g(x) seien differenzierbare Funktionen. Dann folgt:
d
f (g(x)) = f 0 (g(x)) g 0 (x)
dx
Beispiel
sin x2
0
= cos x2 2x
(1.16)
(1.17)
8
1 Einleitung
1.2.3 Der Gradient
Der Gradient ist ein Differentialoperator, der auf ein Skalarfeld angewandt werden kann. Das Ergebnis ist ein Vektorfeld, das die Änderungsrate und Richtung
der größten Änderung des Skalarfeldes angibt. Ein Skalarfeld f (x, y, z) ist eine
Funktion, die jedem Punkt im Raum eine Zahl zuordnet. Beispiele hierfür sind
z.B. die Beschreibung des Luftdrucks oder der Temeratur in der Atmosphäre. Für
den Gradienten von f gilt:
∂f
∂x
grad f (x, y, z) = ∇f (x, y, z) = ∂f
∂y
(1.18)
∂f
∂z
∂f
∂x
bezeichnet man als partielle Ableitung von f nach x.
1.2.4 Integrationsgesetze
Das Integrieren wird häufig auch als Aufleiten bezeichnet. Ziel des Integrierens
ist es, die Fläche unterhalb eines Graphen zu bestimmen. Folgende Integrationsgesetze sind von besonderer Relevanz:
Die Stammfunktion
Für die Stammfunktion F (x) einer Funktion f (x) gilt folgende Beziehung:
Z
d
F (x) = f (x) bzw.
f (x)dx = F (x)
(1.19)
dx
Es gibt unendlich viele Stammfunktionen F (x) einer Funktion f (x), da bei der
Integration eine Integrationskonstante C berücksichtigt werden muss. Dies soll
im folgenden Abschnitt deutlich werden.
Integration von Potenzfunktionen
Z
1
xn+1 + C
(1.20)
n+1
C heißt Integrationskonstante. Man bezeichnet das obenstehende Integral als unbestimmtes Integral.
xn dx =
1.2 Fundamentale Rechengesetze
9
Das bestimmte Integral
Integriert man eine Potenzfunktion zwischen zwei gegebenen Grenzen x1 und x2
so folgt:
Zx2
xn dx =
1
1
−
xn+1
xn+1
2
n+1
n+1 1
(1.21)
x1
Im Allgemeinen gilt für das bestimmte Integral:
Zx2
f (x)dx = F (x2 ) − F (x1 )
(1.22)
x1
Integrieren von Sinus, Kosinus und 1/x
Z
sin(x)dx = − cos(x) + C
(1.23)
cos(x)dx = sin(x) + C
Z
1
= ln(x) + C
x
(1.24)
Z
(1.25)
Integration durch lineare Substitution
Ist die innere Funktion g(x) bei verketteten Funktionen der Form f (g (x)) eine
lineare Funktion, so erhält man die Stammfunktion durch lineare Substitution“.
”
Es gilt:
Z
1
(1.26)
f (mx + b) dx = F (mx + b) + C
m
Beispiel 1: Es soll das unbestimmte Integral von f (x) = e2x+3 gebildet werden.
Es gilt für die äußere bzw. innere Funktion:
f (x) = ex
und entsprechend F (x) = ex + C
g(x) = 2x + 3
Nach der Regel für die lineare Substitution folgt:
Z
1
e2x+3 dx = e2x+3 + C
2
(1.27)
(1.28)
(1.29)
10
1 Einleitung
Beispiel 2: Es soll das unbestimmte Integral von f (x) = sin (4x + 2) gebildet
werden. Es gilt für die äußere bzw. innere Funktion:
f (x) = sin(x) und entsprechend F (x) = − cos(x) + C
(1.30)
g(x) = 4x + 2
(1.31)
Nach der Regel für die lineare Substitution folgt:
Z
1
sin (4x + 2) dx = − cos (4x + 2) + C
4
(1.32)
Integration durch Trennung der Variablen
Für
dy
= f (x)g(y)
dx
(1.33)
dy
= f (x)dx + C
g(y)
(1.34)
folgt
Beispiel
Radioaktiver Zerfall: Die Abnahme dN der Anzahl der Kerne pro Zeit dt ist
proportional zur Zerfallskonstanten λ und Anzahl N der Kerne.
dN
1
dN
Z N
1
dN
N
ln(N (t))
= −N λdt
(1.35)
= −λdt
Z
= −λ dt
(1.36)
= −λt + C
(1.38)
(1.37)
N (t) = e−λt+C
(1.39)
N (t) = e−λt · eC
(1.40)
N (t) = N0 · e−λt
(1.41)
(1.42)
N0 kann als Anzahl der Kerne zur Zeit t = 0 gedeutet werden.
2 Klassische Mechanik
2.1 Kinematik
Die Kinematik ist die Lehre der Bewegung (gr. Kinema).
Eine Bewegung ist eine zeitliche Veränderung der Position. Bewegung ist ein relativer Begriff. Beispielsweise bewegt sich ein Zugreisender aus Sicht des Schaffners
nicht, da der Reisende in seinem Sitz sitzen bleibt. Aus Sicht eines am Bahnstieg
stehenden Fahrgastes bewegt sich dagegen der Reisende mit der Geschwindigkeit
des Zuges. Die Bewegung ist daher ein relativer Begriff. Ohne die Angabe eines
Bezugssystems ist eine Aussage über eine Bewegung sinnlos.
Wechselt man von einem Bezugssystem in ein anderes, so spricht man von einer
Transformation. Dabei unterscheidet man zwischen einer Translation (Verschiebung) und einer Rotation (Drehung).
Wichtig: Physikalische Gesetze dürfen nicht von der Wahl des Bezugssystems
abhängen.
2.1.1 Massepunkt
Zur Erleichterung einer physikalischen Beschreibung bedient man sich des Massepunktes. Der Massepunkt ist ein Gebilde mit der Masse m und einer unendlich
kleinen Ausdehnung. Er ist eine Idealisierung, bei der angenommen wird, dass
die gesamte Masse des Körpers in einem Punkt konzentriert ist.
12
2 Klassische Mechanik
Abbildung 2.1: Abbildung eines Geschwindigkeitvektors [Stoecker2000]
2.2 Geschwindigkeit
Die Geschwindigkeit ist eine vektorielle Größe und ist ebenso wie die Länge durch
ihren Betrag und ihre Richtung festgelegt. Für die momentane Geschwindigkeit
gilt:
∆~r
= lim
∆t→0 ∆t
∆t→0
~v (t) = lim
∆x
∆t
∆y
∆t
∆z
∆t
(2.1)
Beispiel:
Gegeben sei ~v (t) = (vx , 0, 0) mit der Startbedingung ~r(0) = (5, 2, 1) Wie hängt
der zurückgelegte Weg von der Zeit ab?
Z
Z
d~r =
~v dt
Z
~r = ~v dt
~v unabhängig von t
vx · t + r0x
~r =
r0y
(2.2)
(2.3)
(2.4)
r0z
Setzt man die Anfangsbedingung ~r(0) = (5, 2, 1) ein, so erhält man:
~r =
vx · t + 5
2
(2.5)
1
Man spricht in diesem Fall von einer gleichförmigen Bewegung, da die Gechwindigkeit |~v | = vx konstant ist. Bei einer gleichförmigen Bewegung besteht zwischen
dem zurücklegten Weg ~r und der Zeit t ein linearer Zusammenhang.
2.3 Beschleunigung
13
2.3 Beschleunigung
Als Beschleunigung versteht man die zeitliche Änderung der Geschwindigkeit.
Sie ist wie die Geschwindigkeit ~v eine vektorielle Größe. Für die momentane
Beschleunigung ~a gilt:
∆~v
=
∆t→0 ∆t
~a(t) = lim
∆vx
∆t
∆vy
∆t
∆vz
∆t
(2.6)
bzw.
∆2~r
∆~v
= lim
=
∆t→0 ∆t2
∆t→0 ∆t
~a(t) = lim
∆2 x
∆t2
∆2 y
∆t2
∆2 z
∆t2
(2.7)
Beispiel:
Gegeben: ~a = (ax , 0, 0). Was gilt dann für x(t) und vx (t)?
dvx
dt
= ax dt
Z
= ax dt
(2.8)
ax =
⇒ dvx
Z
dvx
(2.9)
(2.10)
vx (t) = ax t + v0
v0 ist die Integrationskonstante
(2.11)
Bei der Herleitung der Bahnkurve x(t) geht man wie folgt vor:
dx
= ax · t + v0
dt
dx = (ax · t + v0 )dt
Z
Z
dxx = ax tdt + v0 dt
v(t) =
x(t) =
1 2
ax t + v0 t + x0
2
(2.12)
(2.13)
(2.14)
x0 ist die Integrationskonstante (2.15)
x0 und v0 müssen durch die Anfangsbedingungen festgelegt werden. Lauten die
Anfangsbedingungen z.B. vx (2) = 3 und x(0) = 1 so folgt:
vx (t) = ax t + v0
(2.16)
vx (2) = ax 2 + v0 = 3
(2.17)
v0 = 3 − 2ax
(2.18)
⇒ vx (t) = ax t − 2ax + 3
(2.19)
14
2 Klassische Mechanik
Setzt man dies in die Lösung für die Bahnkurve x(t) samt der Randbedigung
x(0) = 1 ein, so erhält man:
1 2
ax t + (3 − 2ax )t + x0
2
1
x(0) =
ax 02 + (3 − 2ax )0 + x0 = 1
2
x0 = 1
1 2
⇒ x(t) =
ax t + (3 − 2ax )t + 1
2
x(t) =
(2.20)
(2.21)
(2.22)
(2.23)
2.3.1 Überlagerung von Bewegungen
Den waagrechten Wurf kann man als eine ungestörte Überlagerung einer gleichförmigen Bewegung in x-Richtung und einer gleichmäßigen Beschelunigung mit az =
g = 9, 81m/s2 in z-Richtung verstehen.
Für die Bewegung in z-Richtung gilt:
0
~r(t) =
0
(2.24)
− 12 gt2 + h
Für die zusammengesetzte Bewegung aus dem freien Fall in z-Richutng und der
gleichförmigen Bewegung in x-Richtung gilt:
~r(t) =
vx t
0
(2.25)
− 21 gt2 + h
Weiteres Beispiel:
Es ist auch möglich, dass sich drei Bewegungen unabhängig voneinander überlagern (Abb. 2.2), z.B.:
x(t)
x0 + v x t
~r(t) = y(t) =
y0 + vy t
1 2
z(t)
z0 + vz t − 2 gt
(2.26)
2.3 Beschleunigung
15
Abbildung 2.2: Darstellung einer dreidimensionalen Bewegung [Stoecker2000]
Abbildung 2.3: Darstellung des schrägen Wurfs [Tipler2009]
Der schräge Wurf
Zur Vereinfachung wird der schräge Wurf als zweidimensionale Bewegung betrachtet. Es gilt dann:
~v (t) =
x(t)
y(t)
!
=
v0 cos(α)
!
v0 sin(α) − gt
(2.27)
Für die Bahnkurve ~r(t) gilt dann unter der Randbedingung ~r = (0, 0):
~r(t) =
v0 cos(α)t
v0 sin(α)t − 21 gt2
!
(2.28)
16
2 Klassische Mechanik
Abbildung 2.4: Darstellung einer Kreisbewegung [Mueller2001]
2.4 Kreisbewegung
Betrachtet man eine Kreisbewegung, so werden häufig sog. Polarkoordinaten anstatt kartesischer Koordinaten verwendet. Für Polarkoordinaten gilt (siehe Abb.
2.4):
~r(t) =
r cos(θ(t))
r sin(θ(t))
!
(2.29)
θ wird als Bogenmaß bezeichnet. Es gilt:
θ=
Bogenlänge s
Kreisradius r
(2.30)
Es gilt somit s = θ · r. Als Winkelgeschwindigkeit ω bezeichnet man die zeitliche
Änderung des Bogemaßes dθ/dt. Es gilt somit:
ω=
dθ
dt
(2.31)
2.4 Kreisbewegung
17
Somit gilt:
dθ = ωdt
Zθ
Zt
dθ = ω dt
(2.32)
(2.33)
0
θ0
|θθ0 θ
= ω|t0 t
(2.34)
θ(t) − θ0 = ωt
(2.35)
θ(t) = ωt − θ0
(2.36)
Mit t = t0 und θ0 = 0 folgt θ = ωt.
θ = 2π = ωT
2π
T =
ω
(2.37)
(2.38)
Die Frequenz f einer Periode ist der Kehrwert der Umlaufdauer T . Es gilt also:
1
T
ω = 2πf
f =
(2.39)
(2.40)
Bei einer konstanten Kreisbewegung rotiert ein Körper mit einem konstanten
Radius r und einer konstanten Winkelgeschwindigkeit ω
~ (t) = ω
~ um einen Punkt.
Es gilt somit für die Bahnkurve ~r(t):
~r(t) =
r cos(ωt)
!
(2.41)
r sin(ωt)
Die Bahngeschwindigkeit ~v (t) ergibt sich wie folgt:
~v (t) = ~r˙ (t) =
−rω sin(ωt)
!
rω cos(ωt)
(2.42)
Für den Betrag der Bahngeschwindigkeit gilt |~v (t)| = rω.
Allgemein gilt:
~v = ω
~ × ~r
|~v | = |~ω | · |~r| · sin α
(2.43)
(2.44)
Der Winkel α steht zwichen dem Vektor der Winkelgeschwindigkeit ω
~ und dem
Radius ~r der Kreisbahn. Für die Zentripetalbeschleunigung ~ar (t) gilt entspre-
18
2 Klassische Mechanik
Abbildung 2.5: Darstellung der Winkelgeschwindigkeit [Stoecker2000]
chend:
~
dv(t)
~ar (t) =
=
dt
−rω 2 cos(ωt)
2
−rω sin(ωt)
!
= −ω 2~r(t)
(2.45)
Der Betrag der Zentripetalbeschleunigung ergibt zu |~ar (t)| = rω 2 . Die Tangentialbeschleunigung ~aθ tangential zur Bahnkurve ist aufgrund der kosntanten Bahngeschwindigkeit gleich Null. Allgemein gilt für die Zentrifugalbeschleunigung ~ar :
~ar = ω
~ × (~ω × ~r)
(2.46)
~ar zeigt in Richtung von −~r. Die Zentripetalbeschleunigung zeigt also zum Kreismittelpunkt.
2.5 Galilei-Transformation
Wir nehmen an, dass zwei Beobachter in gegeneinander gleichförmig bewegten
Bezugssystemen einen Punkt beobachten. Der Ursprung des System S 0 des einen
Bezugssystems bewege sich gegenüber dem Ursprung von S mit der konstanten
Geschwindigkeit ~u = const, so dass für den Abstand ~s der beiden Koordinatenursprünge ~s = ~ut gilt (siehe Abb. 2.6). Für die Bahnkurve ~r(t) des Punktes ergibt
sich aus Sicht des Beobachters im Bezugssystem S 0 folgende Abhängigkeit:
~r(t) = ~r0 (t) + ~u
Die Zeit ist in beiden Bezugssystemen gleich, so dass t = t0 .
(2.47)
2.5 Galilei-Transformation
19
Abbildung 2.6: Darstellung der Galilei-Transformation [Stoecker2000]
Transformation von Längen
Es soll nun untersucht werden, inwieweit sich eine Länge ∆~r = ~r2 −~r1 unter einer
Galilei-Transformation verändert.
∆~r = ~r2 − ~r1 in S
(2.48)
∆~r0 = ~r20 − ~r10 in S 0
(2.49)
∆~r0 = ~r2 − ~ut − (~r1 − ~ut)
(2.50)
∆~r0 = ∆~r
(2.51)
(2.52)
Die Länge ∆~r ist also invariant gegenüber einer Galilei-Transformation. Sie ist in
beiden Bezugssystem gleich.
20
2 Klassische Mechanik
Transformation von Geschwindigkeiten
Nun stellt sich die Frage, inwieweit sich die Geschwindigkeit gegenüber einer
Galilei-Transformation verändert.
~v (t) =
~v 0 (t) =
~v 0 (t) =
~v 0 (t) =
~v 0 (t) =
d~r(t)
in S
dt
d~r0 (t)
in S 0
dt
d(~r(t) − ~ut)
dt
d~r(t) d~ut
−
dt
dt
~v (t) − ~u
(2.53)
(2.54)
(2.55)
(2.56)
(2.57)
Man sieht, dass die Geschnwidigkeit nicht invariant gegenüber einer Galilei-Transformation ist. Es gilt ~v (t) 6= ~v 0 (t). Eine Angabe zu Geschwindigkeiten ist also nur
bezüglich eines bestimmten Bezugssystems sinnvoll.
Transformation von Beschleunigungen
Es soll auch untersucht werden, inwieweit sich eine Beschleunigung gegenüber
einer Galilei-Transformation verändert.
d~v (t)
~a(t) =
in S
dt
d~v 0 (t)
0
~a (t) =
in S 0
dt
d(~
v (t) − ~u
~a0 (t) =
dt
=0
z}|{
d~v (t)
d~u
~a0 (t) =
−
dt
dt
~a0 (t) = ~a
(2.58)
(2.59)
(2.60)
(2.61)
(2.62)
Man sieht, dass die Beschleunigung invariant gegenüber einer Galilei-Transformation ist. Erfährt ein Massepunkt in einem System S die Beschleunigung ~a, so
erfährt er in jedem anderen Bezugssystem, das sich geradlinig, gleichförmig relativ zu S bewegt, die gleiche Beschleunigung ~a(t) = ~a0 (t).
Bezugssysteme, die sich realtiv zueinander bewegen geradlinig, gleichförmig bewegen, heißen Inertialsysteme.
2.6 Newtonsche Dynamik
21
2.6 Newtonsche Dynamik
Die Dynamik beschäftigt sich mit der Wirkung von Kräften und den daraus
resultierenden Bewegungen. Dagegen stellt die Kinematik die Bewegungslehre
ohne Berücksichtigung einer Kraft als Ursache einer Bewegung dar. Die Statik beschäftigt sich mit unbewegten Objekten, bei denen angreifende Kräfte im
Gleichgewicht stehen.
2.6.1 Newtonsche Gesetze
In dem berühmten Werk Philosophiae Naturalis Principia Mathematica (Mathematische Prinzipien der Naturphilosophie) formulierte im Jahr 1687 der englische
Naturforscher Isaac Newton drei Grundsätze (Gesetze) der Bewegung, die als die
newtonschen Axiome bekannt sind.
1. Newtonsches Axiom
Jeder Körper verharrt im Zustand der Ruhe oder der gleichförmigen Bewegung,
falls er nicht durch äußere Kräfte F~i gezwungen wird, diesen Zustand zu ändern.
Es gilt:
X
F~i = 0 ⇒ ~a = 0
(2.63)
i
Dieses Trägheitsprinzip gilt auschließlich in Inertialsystemen, d.h. es gilt nicht
in beschleunigten Bezugssystemen. Für isolierte Körper (keiner Wechselwirkung
unterliegende) ist in Inertialsystemen die Beschleunigung Null.
Bewegt sich ein Körper geradlinig gleichförmig in einem Bezugssystem S, dann
bewegt er sich auch in jedem anderen Intertialsystem S 0 geradlinig gleichförmig.
Denn nach der Galilei-Transformation für Geschwindigkeiten gilt (Gleichung 2.57):
v~0 = |{z}
~v − |{z}
~u = const
=const
=const
(2.64)
22
2 Klassische Mechanik
2. Newtonsches Axiom
Eine Kraft F~ , die auf einen Körper mit Masse m einwirkt, führt zu einer Beschleunigung ~a des Körpers, die proportional zur Kraft ist. Es gilt:
~a =
1 ~
F
m
(2.65)
Man sieht in Gleichung 2.65, dass die Masse m die Bedeutung einer Proportionalitätskonstanten hat. Je größer die Masse m, desto kleiner ist die resultierende
Beschleunigung ~a bei einer angreifenden Kraft F~ .
Für die Einheit der Kraft gilt [F~ ] = 1kg sm2 = 1N. Früher wurde häufig die Einheit
1 kp = 9,81 N verwendet. Ein Kilopond (kp) entspricht demnach der Gewichtskraft eines Körpers der Masse m = 1 kg.
Das zweite Newtonsche Axiom ist zudem invariant gegenüber einer Galilei-Transformation. Nach Gleichung 2.62 ist für alle Inertialsysteme S und S 0 ~a = ~a0 . Demnach gilt unter Berücksichtigung von Gleichung 2.65 F~ = F~ 0 , da m = m0 . Somit
hat in jedem Inertialsystem das zweite Newtonsche Axion die Form F~ = m~a.
Einstein folgerte daraus, dass alle Gesetze der Physik in allen Interialsystemem
gleich sind.
Anwendungen des zweiten Newtonschen Axioms
Nach Gleichung 2.65 gilt
F~ = m~a = m~r¨
(2.66)
(1) Sind alle Kräfte, die auf einen Massepunkt wirken, bekannt, so lässt sich mit
Hilfe einer Divison durch die Masse die Beschleunigung des Körpers bestimmen.
Durch eine zweimalige Integration nach der Zeit erhält man auch die Bahnkurve
~r(t) des Körpers.
(2) Ist dagegen durch eine Beobachtung die Bahnkurve ~r(t) des Körpers bekannt,
so lässt sich durch Differenzieren die Beschleunigung ermitteln. Mit dieser kann
die auf den Körper einwirkende Kraft bestimmt werden.
2.6 Newtonsche Dynamik
23
3. Newtonsches Axiom
Das dritte Newtonsche Axiom besagt, dass es zu jeder einwirkenden Kraft F~12
(actio) eine Gegenkraft F~21 (reactio) gibt, für die gilt:
F~12 = −F~21
(2.67)
Demnach ist in einem abgeschlossenen System die Summe aller Kräfte gleich Null:
X
F~i = 0
(2.68)
i
2.6.2 Superpositionsprinzip
In Newtons Werk wird das Prinzip der ungestörten Überlagerung als Zusatz
zu den Bewegungsgesetzen beschrieben. Wirken auf einen Massepunkt mehrere Kräfte F~1 , F~2 , F~3 , ...F~n , so ergibt sich die resultierende Kraft F~R als Summe der
angreifenden Kräfte:
F~R = F~1 + F~2 + F~3 + ... + F~n
n
X
=
F~i
(2.69)
(2.70)
i=1
Die Kräfte F~i addieren sich hierbei vektoriell:
F~R =
F~1
=
=
F~n
F1x
F2x
F3x
Fnx
F1y + F2y + F3y + ... + Fny
F1z
F2z
F3z
Fnz
F1x + F2x + F3x + .. + Fnx
F1y + F2y + F3y + .. + Fny
F1z + F2z + F3z + .. + Fnz
+
F~2
+
F~3
+ ... +
Das Superpositionsprinzip ist auch unter dem Begriff Lex quarta bekannt.
(2.71)
(2.72)
(2.73)
24
2 Klassische Mechanik
Abbildung 2.7: Schematische Darstellung der Addition von vier Kräften
[Stoecker2000]
2.7 Der Impuls
Der Impuls p~ ist definiert als das Produkt aus der Masse m eines Körpers und
seiner Geschwindigkeit ~v :
p~ = m~v
(2.74)
= 0) gilt:
Für eine zeitliche konstante Masse ( dm
dt
d~p
d(m~v )
d~v
p~˙ =
=
= m = m~a = F~
dt
dt
dt
(2.75)
Die Kraft ist somit die zeitliche Änderung des Impulses. Daher spricht man bei
einer Implusänderung auch häufig von einem Kraftstoß.
Nach dem dritten Newtonschen Axiom ist in einem abgeschlossenen System (vgl.
P
Gleichung 2.68) ohne resultierende (externe) Kraft der Gesamtimpuls i p~i = p~
erhalten:
X
F~i = 0 =
ˆ
i
X
p~i = const
(2.76)
i
2.7.1 Die Raketengleichung - Impulserhaltung bei
veränderlicher Masse
Eine Rakete stößt kontinuierlich heiße Gase, die aus der Verbrennung des mitgeführten Treibstoffs entstehen, mit hoher Ausströmgeschwinidigkeit ~u nach hinten aus und wird durch deren Rückstoß nach vorne getrieben. Die Raketemasse
nimmt daher während der Beschleunigung ab. Eine Rakete kann im Gegensatz
zum Düsentriebwerk, welches Luft aus der Atmosphäre angesaugt und nach hinten austößt, auch im Vakuum betrieben werden. Zur Berechnung der Beschleu-
2.7 Der Impuls
25
nigung betrachtet man ein kleines Zeitintervall ∆t, in dem eine Masse ∆M von
der Rakete der Anfangsmasse M mit der Geschwindigkeit ~u ausgestoßen wird.
Dabei steigt die Geschwindigkeit der Rakete von ~v0 auf ~v0 + ∆~v an. Der Impuls
der Rakete ergibt sich zu:
p~ = M · ~v0 = (mR + mB ) · ~v0
(2.77)
mB beschriebt hierbei die Masse des Brennstoffs zum Zeitpunkt t = 0, während
mR die Masse der ausgebrannten Rakete angibt. Für die Zeit t gilt:
t = t0 + ∆t
(2.78)
Nach der Zeit ∆t haben sich die Größen wie folgt geändert. Der Impuls des Gesamtsystems (Rakete + ausgeströmtes Gas) bleibtjedoch insgesamt konstant:
p~ = (M − ∆M ) · (~v0 + ∆~v ) + ∆M~u
= (M − ∆M ) · (~v0 + ∆~v ) + ∆M · (~vrel + ~v0 )
(2.79)
(2.80)
= M~v0 + M ∆~v − ∆M~v0 − ∆M
| {z∆~v} +∆M~vrel + ∆M~v0 = M~v0 (2.81)
klein
Es ergibt sich:
M ∆v + ∆M~vrel = 0
(2.82)
Für die Relativgeschwindigkeit ~vrel zwischen der Ausströmgeschwindigkeit ~u des
Verbrennugsgases und der Geschwindigkeit v~0 der Rakete gilt:
~vrel = v~0 + ~u
(2.83)
Für ∆t → 0 folgt:
M
d~v
dM
+ ~vrel
=0
dt
dt
Abbildung 2.8: Schematische Darstellug einer Rakete [Mueller2001]
(2.84)
26
2 Klassische Mechanik
Abbildung 2.9: Scheamtische Darstellung der Impulserhaltung bei einer Rakete
[Mueller2001]
aus Gleichung 2.84 wird als Schubkraft bezeichnet. Die
Der Summand ~vrel dM
dt
Schubkratf besitzt die Einheit Newton. Gleichung 2.84 lässt sich wie folgt umformen:
−~vrel dM = M d~v
vend
ZmR
Z
dM
1
−
=
dv
M
~v rel
mb +mR
(2.85)
(2.86)
v0
(2.87)
Damit ergibt sich sich eine Endgeschwindigkeit vend zu:
mB + mR
vend = vrel · ln
+ v0
mR
(2.88)
2.8 Kräfte in der Natur und Technik
In diesem Abschnitt werden die unterschiedlichen Arten von Kräfte betrachtet.
2.8.1 Gewichtskraft
Die Gewichtskraft ist die Anziehungskraft der Erde, die auf alle Körper wirkt.
Sie ist proportional zur Masse eines Körpers. Die Proportionalitätskonstante ist
die Fall- bzw. Erdbeschleunigung g, die an einem festen Ort für alle Körper unabhängig von ihrer Masse gleich groß ist. Für Mittelhessen beträgt die Fallbeschleunigung g = 9, 81m/s2 . Für die Gewichtskraft gilt:
FG = m · g
(2.89)
2.8 Kräfte in der Natur und Technik
27
2.8.2 Gravitationskraft
Unter der Gravitationskraft F~G versteht man die anziehende Kraft zweier massebehafteter Körper der Massen m1 und m2 . Die Kraft nimmt quadratisch mit
dem Abstand der beiden Körper ab:
m1 · m2
~er12
F~G = γ
2
∆~r12
(2.90)
Die Proportionalitätskonstante γ = 6, 67428·10−11 m3 /kg·s2 wird als Gravitationskonstante bezeichnet. Sie ist im ganzen Universum gleich groß. Für Körper auf der
Erdoberfläche ergibt sich folgende Gravitationskraft (Erdradius rE = 6.371.000m,
Erdmasse mE = 5,9736·1024 kg:
m1 · m2
~er12
F~G = γ
2
∆~r12
mE
=
γ 2
r
| {zE }
=
(2.91)
m2~er12
unabhängig vom Objekt
9, 81m/s2 m2~er12
(2.92)
(2.93)
Mit m2 = m folgt das Gesetz der Gewichtskraft aus Abschnitt 2.8.1.
2.8.3 Drehmoment
~ einer Kraft ist das Vektorprodukt aus dem Ortsvektor ~r und
Das Drehmoment M
der Kraft F~ , die am Ort ~r wirkt:
~ = ~r × F~
M
= r · F · sin(θ)
(2.94)
(2.95)
~ ] =Newtonmeter = Nm.
Die Einheit des Drehmoments ist [M
Wirken auf einen Körper mehrere Kräfte F~i , so können die einzelnen Drehmomen~ i = ~ri × F~i vektoriell zu einem resultierenden Drehmoment zusammengesetzt
te M
werden:
~ =
M
n
X
i=1
~i
M
(2.96)
28
2 Klassische Mechanik
Abbildung 2.10: Schematische Darstellung des Drehmoments [Mueller2001]
2.8.4 Hangabtriebskraft und Normalkraft
Bei der Beschreibung einer schiefen Ebene mit dem Neigungswinkel α wird die Gewichtskraft FG in die Hangabtriebskraft FHA und die Normalkraft FN zerlegt. Die
Zerlegung von Kräften wird angewendet, wenn ein Körper, wie bei der schiefenen
Ebene, in einer bestimmten Weise unterstützt wird. Für die Hangabtriebskraft
FHA und die Normalkraft FN gilt entsprechend Abbildung 2.11:
FHA = mg sin(α)
(2.97)
FN = mg cos(α)
(2.98)
Abbildung 2.11: Schematische Darstellung der Hangabtriebskraft und der Normalkraft [Stoecker2000]
2.8 Kräfte in der Natur und Technik
29
2.8.5 Reibungskräfte
Reibungskräfte treten bei der Bewegung auf, wenn sich der Körper in Berührung
mit einem anderen Körper oder durch eine Flüssigkeit (oder ein Gas) bewegt.
Reibungskräfte wirken parallel zu der Berührungsfläche.
Strömungswiderstand - Luftwiderstand
Ein Körper, der sich mit einer Geschwindigkeit vrel relativ zu einem gasförmigen oder flüssigen Medium bewegt, erfährt einen Strömungswiderstand Fcw . Die
Kraft des Strömungswiderstandes wirkt dabei der Bewegungsrichtung entgegen.
Bewegt sich ein Körper durch Luft, so spricht man auch vom Luftwiderstand; bei
hydrodynamischen Problemen im Wasser spricht man entsprechend vom Wasserwiderstand.
Für frei umströmte Körper ergibt sich für den Strömungswiderstand die folgende
Abhängigkeit:
1
2
(2.99)
Fcw = cw ρA~vrel
2
A entspricht hierbei die senkrecht zur Bewegungsrichtung (senkrecht zu ~vrel ) projezierte Fläche des Körpers und ρ die Dichte des umgegebenden Mediums. Die
Proportionalitätskonstante cw ist charakteristisch für den umströmten Körper
und wird als Strömungswiderstandsbeiwert bezeichnet.
Objekt
cw -Wert
Objekt
cw -Wert
Kugelhalbschale
1,33
Cabrio offen
0,5
LKW
0,8
VW Käfer
0,48
Mensch
0,78
modernes Auto
0,3
Tragflügel
0,08
Tropfenform
0,05
Tabelle 2.1: Übersicht cw -Werte
Haftreibung
Die Haftreibung FHR wird durch die Rauheit der Berührungsflächen bedingt und
äußert sich als Widerstand eines Körpers gegen ein Gleiten. Haftreibung tritt nur
auf, wenn ein Körper auf einer Berührungsfläche ruht. Wirkt auf den Körper eine
30
2 Klassische Mechanik
Kraft, dann setzt eine Bewegung erst ein, wenn diese angreifende Kraft die Haftreibungskraft übersteigt. Die Haftreibungskraft ist proportional zur Normalkraft
FN , die den Körper auf eine Auflagefläche drückt. Die Proportionalitätskonstante
µ0 wird als Haftreibungszahl bezeichnet. Es gilt:
FHR = µ0 FN
(2.100)
Die Haftreibungskraft hängt nicht von der Größe der Berühungsfläche ab, sondern
lediglich vom Material der Körper und ihrer Oberflächenbeschaffenheit.
Gleitreibungskraft
Eine Gleitreibung tritt auf, wenn ein Körper auf einer Berührungsfläche gleitet.
Die Gleitreibungskraft FGR ist der Geschwindigkeit des Körpers entgegengerichtet, ihr Betrag ist proportional zum Betrag der Normalkraft FN :
FGR = µFN
(2.101)
Die Proportionalitätskonstante µ wird als Gleitreibungszahl bezeichnet.
Rollreibung
Rollreibung tritt auf, wenn ein Körper (z.B. ein Rad) auf einer ebenen Unterlage
nicht gleitet, sondern rollt. Eine Rollreibung entsteht durch die Deformation von
Rad und Unterlage. Eine am Radkranz angreifende, der Zugkraft an der Radachse entgegengerichtete Rollreibungskraft FR bewirkt, dass die Bodenkraft nicht
am Punkt P1 (momentane Drehachse), sondern am Punkt P2 angreift. Die Bodenkraft ist die Resultierende aus der Gegenkraft der Normalkraft FN und der
Rollreibungskraft FR . Ein Rad rollt gleichmäßig, wenn die Summe von Normalkraft, Bodenkraft und Zugkraft verschwindet. Die Rollreibungszahl fR drückt die
Proportionalität zwischen der Normalkraft FN und dem durch die Reibungskraft
bewirkten Drehmoment M aus:
M = fR F N
(2.102)
Mit M = FR R ergibt sich für die Rollreibungskraft:
FR =
fR
FN
R
(2.103)
2.8 Kräfte in der Natur und Technik
31
Abbildung 2.12: Schematische Darstellung der Rollreibung [Stoecker2000]
Abbildung 2.13: Schematische Darstellung einer Rolle [Stephan]
Die Rollreibungszahl hat die Dimension einer Länge. Die Rollreibung ist abhängig
von der Belastung, dem Raddurchmesser, Material von Rad und Unterlage und
der Geschwindigkeit. Mit wachsendem Raddurchmesser wird sie geringer. Die
Rollreibungszahl für einen Autoreifen auf einer asphaltierten Straße beträgt beispielsweise ca. 0,001 - 0,0015 m.
Seilreibung
Die Reibung zwischen einem Seil (Riemen oder Band) und Rolle (Trommel) resultiert in einer Seilreibungskraft. An den Enden des Seils in Abbildung 2.13 wirken
die Kräfte F~1 und F~2 . Um die Seilreibung beschreiben zu können, betrachten
wir in Abbildung 2.14 einen Ausschnitt ∆ϕ des Winkels/Bogenmaßes. Für die
Haftreibung zwischen Seil und Rolle gilt:
∆F~R = µ0 ∆F~N
(2.104)
32
2 Klassische Mechanik
Die Normalkraft F~N wird in diesem Zusammenhang auch oft als Auflagekraft
bezeichnet. Für die vertikalen Kräfte aus Abbildung 2.14 gilt:
∆FN = (F + ∆F ) sin(α) + F · sin(α) = (2F + ∆F ) · sin(α)
(2.105)
Für die horizontalen Kräfte gilt entsprechend:
(F + ∆F ) · cos(α) = ∆FR + F cos(α)
∆FR = ∆F cos(α)
(2.106)
(2.107)
Setzt man Gleichungen 2.105 und 2.107 in Gleichung 2.104 ein, so erhält man:
∆F · cos(α) = µ0 (2F + ∆F ) · sin(α)
∆F = µ0 (2F + ∆F ) · tan(α)
∆F
µ0 (2F + ∆F ) · tan(α)
=
∆ϕ
∆ϕ
∆F
µ0 (F + 2 ) · tan(α)
∆F
=
∆ϕ
∆ϕ
2
∆F tan(α)
∆F
= µ0 (F +
)·
∆ϕ
2
α
(2.108)
(2.109)
(2.110)
(2.111)
(2.112)
(2.113)
Für ϕ → 0 gilt auch α → 0, ∆F → 0 und
tan(α)
α
→ 1. Es folgt:
dF
= µ0 · F
dϕ
(2.114)
Gleichng 2.114 stellt eine DGL1 dar, welche man durch Trennung der Variablen
löst. Man erhält:
F (ϕ) = eµ0 ·ϕ+c = |{z}
ec ·eµ0 ·ϕ = F0 · eµ0 ·ϕ
(2.115)
=F0
Beim Heraufziehen einer Last ist F0 die Kraft der Last und F die hebende Kraft.
Beim Herablassen ist F die Kraft der Last, F0 die haltende Kraft:
FHeben = eµ0 ϕ FLast
(2.116)
FSenken = e−µ0 ϕ FLast
(2.117)
Diese Formeln gelten, wenn der Zylinder in Ruhe ist und das Seil sich mit konstanter Geschwindigkeit bewegt, oder wenn das Seil ruht und der Zylinder mit
2.8 Kräfte in der Natur und Technik
33
Abbildung 2.14: Schematische Darstellung der Kräfte bei der Seilreibung
[Stephan]
gleichbleibender Geschwindigkeit rotiert. Bei der Seilreibung hängt der Gleitreibungskoeffizient von der Geschwindigkeit des Seils und vom Radius der Rolle ab.
Soll beim Heben einer Last das Seil nicht rutschen, dann muss gelten:
F
≤ eµ0 ϕ
F0
(2.118)
Z. B. beträgt die Haftreibungszahl zwischen einem Lederriemen und Metall ca.
0,6.
2.8.6 Trägheitskräfte in rotierenden Bezugssystemen
Die Kreisbewegung ist keine gleichförmige geradlinige Bewegung, sondern eine
beschleunigte. Damit muss eine Kreisbewegung die Folge einer Kraft sein. Die
Beschleunigung macht sich nicht unbedingt in einer Erhöhung der Geschwindigkeit bemerkbar, sondern in einer Ändeurng der Richtung.
1
Differenzialgleichung
34
2 Klassische Mechanik
Zentripetal- und Zentrifugalkraft
In einem rotierenden Bezugssystem kann man Ort, Geschwindigkeit und Beschleunigung wie folgt ausdrücken:
~r(t) =
~vR (t) =
~aR (t) =
3
X
i=1
3
X
i=1
3
X
ri (t)êi (t)
(2.119)
ṙi (t)êi (t)
(2.120)
r̈i (t)êi (t)
(2.121)
i=1
Es ist zu beachten, dass die Einheitsvektoren êi von der Zeit t abhängen. Aus
Sicht eines Inertialsystems ergibt sich somit:
X dri
d
d~r
=
êi (t) + ri êi (t)
dt
dt
dt
i
= ~vR + ri
d
êi (t)
dt
(2.122)
(2.123)
Für die Beschleunigung gilt:
X d2 ri
X dri d
d2~r
d2
=
ê
(t)
+
2
ê
(t)
+
r
ê (t)
i
i
i
2
2 i
dt2
dt
dt
dt
dt
i
i
X dri d
X d2
êi (t) +
ri 2 êi (t)
= ~aR (t) + 2
dt
dt
dt
i
i
(2.124)
(2.125)
Die Einheitsvektoren êi (t) verändern sich im Fall einer konstanten Winkelgeschwindigkeit wie folgt:
d
êi (t) = ω
~ × êi
dt
d
d2
d~ω
× êi +~ω × êi
êi (t) =
2
dt
dt
|dt {z }
|{z}
=0
= ω
~ × (~ω × êi )
(2.126)
(2.127)
ω
~ ×êi
(2.128)
2.8 Kräfte in der Natur und Technik
35
Damit folgt:
X d2 ri
X dri d
d2~r
d2
ê
(t)
=
ê
(t)
+
2
ê (t)
+r
i
i
2 i
2 i
dt2
dt
dt
dt
dt
| {z }
| {z }
i
i
ω
~ ×êi
= ~aR (t) + 2~ω ×
X dri
|i
dt
{z
ω
~ ×(~
ω ×êi )
êi (t) +~ω × (~ω ×
=~vR
(2.129)
X
ri êi )
(2.130)
| i {z }
}
=~
r
= ~aR (t) + 2~ω × ~vR + ω
~ × (~ω × ~r)
(2.131)
~aR ist die Beschleuningung des Körpers der Masse m, die der Beobachter im
rotierenden Bezugssystem wahrnimmt. Dafür gilt:
m~aR =
d2~r
m 2
dt }
| {z
~ ~r)
−2m~ω × ~vR −m~ω × (ω ×
|
{z
}|
{z
}
physik.Kraf t
Coriloiskraf t
(2.132)
Zentrif ugalkraf t
Die Zentrigul- und Corioliskraft sind eine Folge der Trägheit. Man bezeichnet
beide Kräfte als sog. Scheinkräfte. Aufgrund der Corioliskraft werden Luftmassen, die aufgrund der hohen Temperatur am Äquator aufsteigen, nach Osten
abgelenkt, so dass sich der sog. Jet-Stream ausbildet. Ein weiterer Effekt der Coriloiskraft ist, dass sich Wirbel eines Hochdruckgebiets auf der Nordhalbkugel im
Uhrzeigersinn und Wirbel eines Tiefdruckgebiets entgegengesetzt des Uhrzeigersinns drehen.
Ist die Winkelbeschleunigung nicht konstant, so folgt:
d~ω
d
d2
êi (t) =
× êi + ω
~ × êi
2
dt
dt
dt
|{z}
(2.133)
ω
~ ×êi
= ω
~˙ × êi + ω
~ × (~ω × êi )
(2.134)
Dies führt zu:
m~aR =
d2~r
m 2
dt }
| {z
physik.Kraf t
~ ~r)
−2m~ω × ~vR −m~ω × (ω ×
|
{z
}|
{z
}
Coriloiskraf t
ω
~˙ × ~r}
|−m{z
Zentrif ugalkraf t AnteilW inkelbeschleunigung
(2.135)
36
2 Klassische Mechanik
2.8.7 Federkraft - Hookesche Gesetz
Eine Feder übt aufgrund ihrer Elastizität eine rücktreibende Kraft Fx aus, die
proportional zu ihrer Auslenkung x ist:
F ∝ −x
(2.136)
F = −kx
(2.137)
Die Proportionalitätskonstante k heißt Federkonstante. Das Hookesche Gesetz
gilt nur für kleine Auslenkungen x aus der Ruhelage. Bei größeren Auslenkungen
treten Nichtlinearitäten auf bis die Feder letztendlich bricht. Es gibt verschiedene
Arten von Federn:
• Zugfedern üben bei einer Ausdehnung eine Zugkraft aus
• Druckfedern setzen beim Zusammendrücken eine Druckkrft entgegen
• Torsionsfedern setzen einem äußeren Drehmoment ein Gegenmoment entgegen
Auch können mehrere Federn verbunden werden. Bei einer Parallelschaltung von
Abbildung 2.15: Linearität beim Hookeschen Gesetz
2.8 Kräfte in der Natur und Technik
37
Abbildung 2.16: Foto einer Torsions-, Druck- und Zugfeder
Abbildung 2.17: Parallelschaltung zweier Federn [Stoecker2000]
n Federn ergibt sich die resultierende Federkonstante kres zu:
kres = k1 + k2 + k3 + ... + kn
(2.138)
Bei einer Reihenschaltung von n Federn ergibt sich die resultierende Federkonstante kres zu:
1
kres
=
1
1
1
1
+
+
+ ... +
k1 k2 k3
kn
Abbildung 2.18: Reihenschaltung zweier Federn [Stoecker2000]
(2.139)
38
2 Klassische Mechanik
Abbildung 2.19: Schematische
Darstellung
zur
Drehimpulserhaltung
[Stoecker2000]
2.8.8 Der Drehimpuls
~ eines Körpers der Masse m ist als das Vektorprodukt aus dem
Der Drehimpuls L
Ortsvektor ~r und dem Impuls p~ des Körpers definiert:
~ = ~r × p~
L
~ = |~r| · |~p| · sin(α)
|L|
(2.140)
(2.141)
α beschreibt hierbei den Winkel zwischen dem Ortsvektor ~r und dem Impuls p~
des Körpers. Bei einer Kreisbewegung steht der Drehimpuls senkrecht auf der
Ebene, in der sich die Masse bewegt, sofern sich der Bezugspunkt des Drehimpulses ebenfalls in dieser Ebene befindet.
Wie das in Abbildung 2.19 dargestellte Beispiel zeigt, ist der Drehimpuls eine Erhaltungsgröße. Übergibt man einer Person, die ruhig auf einem Drehstuhl
sitzt, ein rotierendes Rad mit einer Ausausrichtung senkrecht zur Drehstuhlachse,
bleibt der Drehstuhl zunächst in Ruhe. Wird die Radachse aufgerichtet, parallel
zur Drehstuhlachse, dreht sich die Person samt Stuhl umgekehrt zur Raddrehung.
Für ein System aus n Massepunkten folgt für den Gesamtdrehimpuls:
~ =
L
n
X
mi~ri × ~vi
(2.142)
i=1
Weitere Beispiele der Drehimpulserhaltung sind Pirouetten beim Eiskunstlauf
oder das Drehen eines Saltos beim Turmspringen.
2.9 Arbeit
39
Abbildung 2.20: Darstellung der Corioliskraft [Stoecker2000]
Die zeitliche Änderung des Drehimpulses ergibt sich zu:
~
dL
d(~r × p~)
d~r
d~p
d~p
=
=
× m~v + ~r ×
= ~v| ×{zm~v} +~r ×
dt
dt
dt
dt
dt
|{z}
(2.143)
=0
~
=F
= ~r × F~
(2.144)
~
= M
(2.145)
Somit ist nach Gleichung 2.145 die zeitliche Änderung des Drehimpulses gleich
~ der wirkenen Kraft F~ .
dem Drehmoment M
2.9 Arbeit
Der physikalische Arbeitsbegriff entwickelte sich aus dem Studium der Kraftübertragung durch Hebel, Seile und Rollen. Man stellte hierbei fest, dass bei einer geeigneten Übersetzung Kraft eingespart“ werden kann. Man muss also einen ge”
wissen Faktor weniger Kraft aufwenden als schließlich auf die zu bewegende Last
wirkt. Allerdings muss man hierfür eine um den gleichen Faktor größere Strecke ~s zurücklegen. Umgekehrt kann man Weg gewinnen, muss dafür aber Kraft
zusetzen. In jedem Fall gibt es eine Größe, die bei einer derartigen Kraftübertragung erhalten bleibt. Dies ist das Produkt aus Kraft und Weg, welches als die
40
2 Klassische Mechanik
physikalische Arbeit W definiert ist ( Goldene Regel der Mechanik“):
”
W = F~ · ∆~r
|W | = |~r| · |F~ | cos(α)
(2.146)
(2.147)
Aus Gleichung 2.147 wird ersichtlich, dass nur der zur Kraft paralle Anteil des
Weges zur Arbeit beiträgt. Eine Kraft verrichtet an einem Körper also keine Arbeit, wenn sich dieser senkrecht zur Kraft bewegt. Die Einheit der Arbeit ist
[W ] =1 Nm = 1 Ws = 1 Joule = 1 J.
Ändert sich die Kraft längs des Weges oder ist dieser gekrümmt, so ist Gleichung
2.147 nicht mehr direkt andwendbar. Man mann ein besseres Resultat erwarten, wenn man den Gesamtweg in mehrere Teile zerlegt, die einigermaßen gerade
sind und auf denen die Änderung der Kraft unwesentlich ist. Auf einem solchem
Wegstück ∆~r wird dann die Arbeit
∆W = F~ · ∆~r
verrichtet. Für den Gesamtweg addieren sich diese Anteile:
X
F~ ∆~r
W =
(2.148)
(2.149)
Das Verfahren wird umso genauer, je feiner die Unterteilung ist. Der Grenzwert
des Verfahrens entspricht dem sog. Linienintegral entlang der Kurve C:
Z
W = F~ d~r
(2.150)
C
I
W (~r1 , ~r1 ) =
F~ (~r) · d~r = 0
(2.151)
C
2.10 Kinetische Energie
Wurde an einem Körper die Arbeit W verrichtet, um ihn zu beschleunigen, dann
wurde diese Arbeit aufgewendet, um dem Körper die Bewegungsenergie (kinetische Energie) ∆Ekin hinzu zu fügen. Für diese gilt:
~
=F
=∆~
r
z
}|
{
2
z }| { 1
1
∆v
1
2
~a
~a (∆t) =
∆t2 = m∆~v 2
W = F~ · ∆~r = F~ = m |{z}
|{z}
2 ∆~v
2 ∆t
2
∆~
v
= ∆t
= ∆t
(2.152)
2.11 Potentielle Energie
41
1
W = m∆~v 2 = ∆Ekin
2
(2.153)
Die Eniheit der kinetischen Energie ist [Ekin ] = Nm = Ws = J.
2.11 Potentielle Energie
Hebt man einen Körper nahe dem Erdeboden der Masse m um die Höhe h, so
leistet man gegen die Schwerkraft eine Hubarbeit
Wpot = mgh
(2.154)
= Epot
(2.155)
Diese Arbeit steckt ebenfalls als potentielle Energie Epot in dem Körper und kann
jederzeit in kinetische Energie umgewandelt werden. Streng genommen, müsste
man bei der Angabe der potentiellen Energie angeben, auf welchen Startort ~r1
diese normiert ist. Wenn man bei der Ermittlung der Arbeit W (~r1 , ~r2 ) immer vom
gleichen Startort ~r1 ausgeht aber den Zielort variiert, ist W eine Funktion von ~r2
allein. Man nennt sie die potentielle Energie W (~r2 ) normiert auf den Ort ~r1 . Es
gibt also unendlich viele Normierungen der potentiellen Energie.
2.11.1 Fluchtgeschwindigkeit
Soll ein Körper das Schwerefeld der Erde verlassen, so muss er unendlich weit von
der Erde entfernt werden. Dabei startet der Körper auf Höhe des Erdradius R.
42
2 Klassische Mechanik
Die dafür benötigte Arbeit beträgt:
Z+∞
W =
F~G d~r
(2.156)
R
Z+∞
mME
γ 2 d~r
=
~r
(2.157)
R
mME +∞
|
~r R
mME
= γ
R
mME R
= γ
R2
= gmR
= −γ
(2.158)
(2.159)
(2.160)
(2.161)
Diese Arbeit entspricht der kinetischen Energie W = Ekin = 21 mv 2 . Man erhält
uf diese Weise die Geschwinidigkeit, die ein Körper besitzen muss, um das Schwerefeld der Erde zu verlassen:
W = Ekin
1 2
mgR =
mv
2
p
v =
2gR
(2.162)
(2.163)
(2.164)
Man erhält eine sog. Fluchtgeschwindigkeit von v = 11200 m/s. Die Fluchgeschwindigkeit wird auch als zweite kosmische Geschwindigkeit bezeichnet. Die
√
erste kosmische Geschwindigkeit ist die Kreisgeschwindigkeit v = gR = 7, 9
km/s, die ein Körper auf einer Kreisbahn mit dem Erdradius R besitzen muss,
um durch die Zentrifugalkraft die Gravitationskraft ausgleichen zu können.
2.12 Der Energiesatz
Die Summe aus kinetischer und potentieller Energie bezeichnet man als mechanische Energie. Die mechanische Energie ist in einem konservativen Kraftfeld konstant. D.h. potentielle Energie kann z.B. beim freien Fall (im Vakuum) vollständig
in kinetische Energie umgewandelt werden. Es gilt:
Ekin + Epot = const
d(Ekin + Epot )
= 0
dt
(2.165)
(2.166)
2.13 Leistung
43
2.13 Leistung
Als Leistung P bezeichnet man die geleistete Arbeit oder Energieänderung ∆Ekin
pro Zeiteinheit:
F~ ∆~r
W
=
= F~ · ~v
∆t
∆t
Die Einheit der Leistung ist [P ] = 1 Watt = 1 W.
P =
(2.167)
2.14 Dynamik eines starren Körpers
Ein Körper rotiere um eine Achse. Die einzelnen Punkte des Körpers seien durch
den senkrechten Abstand ri0 zur Drehachse gekennzeichnet, nicht mehr durch den
vollständigen Ortsvektor ~ri . Der bei ri0 befindliche Massenteil dmi hat die Geschwindigkeit vi = ωri0 und die kinetische Energie 12 dmi vi2 . Die Gesamtenergie des
Körpers ist somit:
Erot =
1X
1 X
dmi vi2 = ω 2
dmi ri02
2
2
(2.168)
Bei einem kontinuierlichen Körper ersetzt man mi durch ρdV und die Summe
durch ein Integral und integriert über das ganze Volumen:
Z
1
1 2
ρr02 dV = Jω 2
Erot = ω
2
2
Den Ausdruck
J=
X
dmi ri02
Z
=
r02 ρdV
(2.169)
(2.170)
bezeichnet man als Trägheitsmoment des Körpers bezüglich der gewählten Rotationsachse. Er besagt, dass sich die einzelnen Massenanteile in der Rotation um
so mehr auswirken, je weiter sie von der Drehachse entfernt sind.
Der Steinersche Satz stellt eine Beziehung zwischen dem Massenträgheitsmoment
bezüglich einer Achse , die durch den Schwerpunkt des Körpers geht, und einer
beliebigen anderen dazu parallelen Achse her: Wenn man das Trägheitsmoment
JA0 eines Körpers in bezug auf eine durch seinen Schwerpunkt gehende Achse A0
kennt, gilt für das Trägeheitsmoment JA einer dazu parallelen Achse
JA = JA0 + M a2
(2.171)
44
2 Klassische Mechanik
, wo bei a der Abstand der beiden Achse ist. Beweis:
X
X
mi ri02 + a2 + 2ari0
X
X
X
mi + 2a ·
mi ri0
=
mi ri02 + a2
|
{z
}
JA =
mi ri2 =
(2.172)
(2.173)
=0
Beispiel: Trägheitsmoment eines dünnen Stabes
Z
r02 ρdV
J =
(2.174)
l
Z2
= ρ·
A · x2 dx
(2.175)
− 2l
=
1
M L2
12
Objekt
Massepunkt um eine Drehachse
(2.176)
Trägheitsmoment J
J = mr2
Hohzylinder
J = mr2 mit r << d
Vollzylinder
J = 21 mr2
Hohlzylinder
Massive Kugel
Kugelschale
r12 +r22
2
2
2
mr
5
J =m
J=
J = 23 mr2 mit r << d
Tabelle 2.2: Übersicht einiger Trägheitsmomente. Die Drehachse verläuft bei den
angebenen Werten durch den Schwerpunkt
2.15 Der Schwerpunkt
Bei Objekten mit einer räumlichen Ausdehnung wird oft zur Vereinfachung des
Problems der Schwerpunkt des Systems verwendet. Dies ist möglich, da der
Schwerpunkt die gleiche Wirkung auf andere Körper besitzt. Umgekehrt kann
man eine angreifende Kraft, die auf alle Massenpunkte des Körpers wirkt, durch
eine einzige Kraft darstellt werden, die im Schwerpunkt des Schwerpunkt des
Körpers angreift. Für den Schwerpunt ~rcm eines Systems aus N Massepunkten
2.16 Wirkungsgrad
45
Abbildung 2.21: Schematische Darstellung des Schwerpunkts [Stoecker2000]
folgt:
~rcm =
N
1 X
mi~ri
M i=1
(2.177)
Hierbei wird M durch die Summation aller Massen berechnet:
M=
N
X
mi
(2.178)
i=1
2.16 Wirkungsgrad
Als Wirkungsgrad η bezeichnet das Verhältnis der Arbeit, die bei einer Energieumwandlung abgegeben wird (effektive Leistung) zu der dazu aufgenommenen
Arbeit (Nennleistung). Oft wird der Wirkungsgrad als das Verhältnis von Ausgangslesitung zu Eingangsleistung definiert:
Paus
Pein
Pein − PV erlust
=
Pein
PV erlust
= 1−
Pein
η =
(2.179)
(2.180)
(2.181)
Der Gesamtwirkungsgrad N hintereinander geschalteter Maschinen ergibt sich
durch Multiplikation der Enzelwirkungsgrade:
ηges =
N
Y
i=1
ηi
(2.182)
46
2 Klassische Mechanik
2.17 Stoßprozesse
In der Physik unterscheidet bei Stoßprozessen zwischen einem elastischen Stoß
und einem inelastischen Stoß. Beim elastischen Stoß bleibt die kinetische Energie
erhalten. Dagegen wird beim inelastischen Stoß ein Teil der kinetischen Energie
in innere Energie (Verformungsarbeit, Wärme) umgewandelt. Sowohl beim elastischen als auch beim inelastischen Stoß bleibt der Impuls des Systems erhalten.
Für den zentralen elastischen Stoß gilt somit:
2
X
1
i=1
2
2
X
mi vi2
=
mi vi =
i=1
2
X
1
i=1
2
X
2
mi u2i
mi ui
(2.183)
(2.184)
i=1
Für den zentralen inelastischen Stoß gilt entsprechend:
2
X
1
i=1
2
2
X
mi vi2
>
2
X
1
i=1
mi vi =
i=1
2
X
2
mi u2i
mi ui
(2.185)
(2.186)
i=1
vi stellt hierbei die Geschwindigkeit der Stoßpartner vor dem Stoß und ui die
Geschwindigkeit der Stoßpartner nach dem Stoß dar. Findet der Stoß nicht eindimesnional statt, so kann der resultierende Impuls mit seinen sechs Komponenten
nicht eindeutig durch die vier Gleichungen bestimmt werden. Die resultierenden
Impulse liegen auf der sog. Impulskugel.
3 Schwingungen
Wiederholt sich ein Vorgang immer nach einem bestimmten Zeitintervall, so nennt
man diesen Vorgang zeitlich periodisch; wiederholt sich dagegen eine Anordnung
immer nach einem festen Abstand im Raum, so nennt man diese Anordnung
räumlich periodisch. Als Oszillator bezeichnet man einen Körper, der die zu beschreibenden Schwingungen ausführt. Als Ruhelage bezeichnet man den Zustand,
in dem sich das System befand, bevor es eine äußere Störung erfuhr.
3.1 Harmonische Schwingungen
Kann eine Schwingung, wie z. B. die Schwingung eines Federpendels (siehe Abbildung 3.1), mit Hilfe einer Sinus- bzw. Kosinusfunktion beschrieben werden, so
bezeichnet man die Schwingung als Harmonische Schwingung. Die harmonische
Schwingung lässt sich demnach wie folgt beschreiben:
u(t) = A cos(ωt + φ)
π
= sin(ωt + φ + )
2
Abbildung 3.1: Schematische
[Stoecker2000]
Darstellung
einer
harmonischen
(3.1)
(3.2)
Schwingung
48
3 Schwingungen
u(t) aus Gleichung 3.1 beschreibt den Zustand des Systems zur Zeit t und wird als
Elongation bezeichnet. Die maximale Elongation A ist die sog. Amplitude. Die
Nullphase φ bestimmt die Elongation zur Zeit t = 0. Durch Gleichung 3.1 wird
eine freie Schwingung beschrieben. D.h. nachdem der Oszillator einmal angeregt
wurde, schwingt das System für alle Zeiten mit einer konstanten Frequenz.
Zwischen der Winkelgeschwindigkeit bzw. Kreisfrequenz ω und der Umlaufdauer
T bzw. der Frequenz f besteht der bekannte Zusammenhang:
1
f
2π
ω =
T
T =
(3.3)
(3.4)
3.2 Das Federpendel
Der erste in Abbildung 3.1 zu sehende Zustand beschreibt die Ruhelage des Systems. Durch eine äußere Kraft, auch Störung genannt, wird die Feder gestaucht,
so dass eine rücktreibende Kraft entsteht, die den Oszillator zur Gleichgewichtslage treibt. Für die rücktreibende Kraft gilt das Hooke’sche Federgestz:
FF = −kx
(3.5)
Mit Hilfe des dritten Newton’schen Axoims folgt:
F = FF
(3.6)
ma = −kx
(3.7)
mẍ = −kx
k
ẍ(t) = − x(t)
m
(3.8)
(3.9)
Man sieht, dass die Lösung der Gleichung 3.9 die Funktion x(t) ist, die die Elongation des Oszillators zur Zeit t beschreibt. Man muss sich die Frage stellen, welche
Funktion x(t) zweimal nach der Zeit abgeleitet wieder die negierte Funktion −x(t)
ergibt. Die Kosinus- und Sinusfunktion erfüllen diese Bedingung:
x(t) = A cos(ωt + φ)
(3.10)
ẋ(t) = −Aω sin(ωt + φ)
(3.11)
ẍ(t) = −Aω 2 cos(ωt + φ)
(3.12)
3.3 Das Fadenpendel
49
Abbildung 3.2: Energiebilanz bei einem Federpendel [Stoecker2000]
Ein Vergleich mit Gleichung 3.9 liefert:
ω2 =
k
m
(3.13)
Energie des Systems
Die Energie des Oszillators setzt sich aus seiner kinetsichen und potentiellen Energie zusammen. Für diese gilt:
Eges
1
1
Ekin = mẋ2 = mA2 ω 2 sin2 (ωt + φ)
2
2
1 2 1
Epot = kx = mA2 ω 2 cos2 (ωt + φ)
2
2
1
1
= Ekin + Epot = mA2 ω 2 = kA2 = const
2
2
(3.14)
(3.15)
(3.16)
Die Gesamtenergie des Systems ist nach Gleichung 3.16 zeitlich konstant und ist
durch die Amplitude A und die Federkonstante k festgelegt. In Abbildung 3.2
ist sowohl die kinetische als auch die potentielle Energie des Systems zur Zeit t
aufgetragen. Man sieht, dass die Summe stets konstant ist.
3.3 Das Fadenpendel
Bei einem Fadenpendel (siehe Abbildung 3.3) hängt ein Körper im Gravitationsfeld der Erde an einem Faden. Wird der Pendelkörper ausgelenkt und losgelassen,
so führt der Körper eine harmonische Schwingung um seine Ruhelage aus. Für die
50
3 Schwingungen
Abbildung 3.3: Schematische Darstellung eines Fadenpendels [Stoecker2000]
Auslenkung x des Pendels gilt x = sin(α)l. Für kleine Winkel kann man sin(α)
durch sin(α) ≈ α annähern, so dass für die zeitliche Veränderung der Auslenkung
folgt:
x = lα
(3.17)
ẋ = lα̇
(3.18)
ẍ = lα̈
(3.19)
Für die rücktreibende Kraft erhält man in guter Näherung
F = −mg sin(α) = −mgα
(3.20)
so dass folgt:
ma = mlα̈
−mgα = mlα̈
g
α̈ = − α
l
(3.21)
(3.22)
(3.23)
Für diese Differentialgleichung erhält man eine ähnliche Lösung wie beim Federpendel:
x(t) = A cos(ωt + φ)
mit ω =
pg
l
.
(3.24)
3.4 Das physikalische Pendel
51
3.4 Das physikalische Pendel
Unter einem physikalischen Pendel versteht man einen starren Körper, der unter
der Wirkung der Gravitationskraft um eine feste Achse Schwingungen ausführt.
Diese Achse geht nicht durch den Schwerpunkt und habe den Abstand l vom
Schwerpunkt. Durch die Schwerkraft wirkt das Drehmoment:
~ = ~r × F~
M
d(~ω × ~r)
d~v
= ~r × m
dt
dt
dω
2
~ | = r · mr
|M
= mr α̈
dt
= ~r × m
(3.25)
(3.26)
(3.27)
Für das Drehmoment und den Drehimpuls um die Drehachse A gilt:
L = JA α̇
M = L̇ = JA α̈
(3.28)
(3.29)
Für das Drehmoment aus Abbildung 3.4 ergibt sich durch die Kombination aus
dem Hebel sin α · l und der angreifenden Gravitationskraft FG = −mg folgende
Beziehung:
JA α̈ = −mgl sin(α)
lmg
α̈ = −
α
JA
(3.30)
(3.31)
Gleichung 3.31 lässt sich analog zum Feder- und Fadenpendel lösen, wobei die
Amplitude A durch den maximalen Auslenkwinkel αmax zu ersetzen ist:
α(t) = αmax cos(ωt + φ)
r
mgl
ω =
J
sA
JA
T = 2π
mgl
(3.32)
(3.33)
(3.34)
Man erkennt, dass man das Trägheitsmoment JA eines beliebigen starren Körpers
durch die Messung von m, l und T bestimmen kann.
Als reduzierte Pendellänge eines physikalischen Pendels bezeichnet man die Fadenlänge l0 , die ein Fadenpendel besitzen müsste, um die gleiche Schwigungsdauer
T wie das physikalische Pendel zu besitzen. Man erhält folgende Bedingugen:
52
3 Schwingungen
Abbildung 3.4: Schematische
Darstellung
eines
physikalischen
Pendels
[Stoecker2000]
TF2
TP2
gJA
=1
l0 mgl
JA
=
ml
=
l0
(3.35)
(3.36)
Ist JS das Trägheitsmoment durch den Schwerpunkt so folgt nach dem Satz von
Steiner JA = JS + ml2 . Für die reduzierte ergibt sich dann:
l0 =
JS
+ ml
ml
(3.37)
3.5 Die Torsionsschwingung
Die Verdrillung eines Körpers führt zu einem Drehmoment M , das proportional
aber entgegengerichtet zum Drehmoment als Ursache der Verdrillung ist. Für
kleine Torsionswinkel α gilt:
M = −Dα
(3.38)
wobei D die Proportionalitätskonstante zwischen M und α darstellt und als Winkelrichtgröße D bezeichnet wird. Mit M = JA α̈ ergibt sich:
3.6 Gedämpfte Schwingungen
Abbildung 3.5: Schematische
53
Darstellung
einer
Torsionsschwingung
[Stoecker2000]
JA α̈ = −Dα
D
α̈ = − α
JA
α(t) = αmax cos(ωt + φ)
r
D
ω =
JA
(3.39)
(3.40)
(3.41)
(3.42)
Man erkennt, dass die Winkelrichtgröße D durch das Messen des Torsionswinkels
α und des daraus resultierenden Drehmoments M oder durch die Schwingungsdauer T und dem Trägheitsmoment JA ermittelt werden kann.
3.6 Gedämpfte Schwingungen
Wirkt auf einem Körper nur eine Kraft, die der Auslenkung proportional und
ihrer Richtung entgegengesetzt ist, schwingt der Körper harmonisch. Die Energie
des Systems bleibt dabei erhalten; sie pendelt dabei zwischen kinetischer und potentieller Form hin und her. Doch in Wirklichkeit tritt hierbei immer ein Energieverlust durch Reibungskräfte auf. Wie betrachten eine Reibung, die proportional
zur Geschwindigkeit ist, die sog. Stokes-Reibung:
F = mẍ = −kx − bẋ
(3.43)
54
3 Schwingungen
Hierbei stellt b die sog. Dämpfungskonstante mit der Einheit kg/s dar. Eine Umformung liefert:
mẍ + bẋ + kx = 0
(3.44)
Mit dem Lösungsansatz x = Aeλt erhält man:
mλ2 Aeλt + bAλeλt + kAeλt = 0
(3.45)
mλ2 + bλ + k = 0
k
b
= 0
λ2 + λ +
m
m
(3.46)
Diese quadratische Gleichung hat zwei Lösungen:
r
b2
b
k
±
λ1,2 = −
−
2
2m
4m
m
(3.47)
(3.48)
Nun müssen drei verschiedene Fälle untersucht werden:
Fall 1: Der Radikand (der Ausdruck unter der Wurzel) ist negativ
Mit einer schwachen Dämpfung b erhält man:
b2
k
−
< 0
2
4m
m
√
b < 2 mk
(3.49)
(3.50)
Mit
b
2m
r
k
b2
ω =
−
m 4m2
δ =
(3.51)
(3.52)
erhalten wir mit der Wurzel λ1 :
x = Ae−δt eiωt
(3.53)
Mit der Euler-Formel eiϕ = cos(ϕ) + i sin(ϕ) erhält man für den Realteil:
x = Ae−δt cos(ωt)
(3.54)
Dieser beschreibt den tatsächlichen Vorgang bei dem eine Sinusschwingung einbeschrieben zwischen zwei abklingenden e-Funktionen als Einhüllende den zeitlichen
Verlauf der Schwingung angibt (siehe Abbildung 3.6). Für die allgemeine Lösung
3.6 Gedämpfte Schwingungen
Abbildung 3.6: Schematische
55
Darstellung
einer
schwach
gedämpften
Schwingung[Stoecker2000]
ist noch die Nullphase zur Zeit t = 0 zu berücksichtigen:
x = Ae−δt cos(ωt + φ)
(3.55)
Fall 2: Der Radikand ist Null
Bei einer mittleren Dämpfung verschwindet die Wurzel. Es gilt dann:
b2
k
−
= 0
2
4m
m
√
b = 2 mk
(3.56)
(3.57)
Mit dem oben angeführten Lösungsansatztes sollte man die Lösung x = Aeλt
erwarten. Da aber für eine eindeutige Beschreibung des Schwingungssystems
zwei Integrationskonstanten benötigt werden und der oben beschriebene Lösungsansatz nur eine Integrationskonstante liefert, wird eine weitere Ansatzfunktion
x(t) = A2 teλt benötigt. Beide Lösungen addiert stellt die gesamte Beschreibung
des Oszillators im sog. aperiodischen Grenzfall dar (siehe Abbildung 3.7).
x(t) = A1 eδt + A2 teδt
(3.58)
Der aperiodische Grenzfall hat für die Praxis eine besondere Bedeutung, da in diesem Fall der Gleichgewichtszustand eines Systems nach einer Störung am schnellsten wieder erreicht wird. Die Lösungen sind keine Schwingungen im eigentlichen
Sinne, da das System nach der Auslenkung aus der Ruhelage nicht mehr durch
die Ruhelage hindurch geht.
56
3 Schwingungen
Abbildung 3.7: Schematische
Darstellung
des
aperiodischen
Grenzfalls
[Stoecker2000]
Fall 3: Der Radikand ist positiv
Bei einer starken Dämpfung wird der Radikand positiv und man erhält:
k
b2
−
> 0
2
4m
m
√
b > 2 mk
(3.59)
(3.60)
Man erhält in diesem sog. Kriechfall die Lösung
x = A1 e
mit ω0 =
p
−δ+
√
δ 2 −ω02 t
+ A2 e
−δ−
√
δ 2 −ω02 t
(3.61)
k/m. Auch diese Lösung ist, wie in Abbildung 3.8 zu sehen ist, keine
Schwingung im eigebtlichen Sinne mehr. Sie geht nach einer Auslenkung auch
nicht mehr durch die Ruhelage hindurch. Sie kehrt exponentiell zur Ruhelage
zurück, aber langsamer als im aperiodischen Grenzfall.
3.7 Erzwungene Schwingungen
Betrachtet man ein zu Sinusschwingungen befähigtes System, so würde es sich
selbst überlassen, gedämpfte Schwingungen mit der Frequenz
r
ω=
k
b2
−
m 4m2
(3.62)
3.7 Erzwungene Schwingungen
57
Abbildung 3.8: Schematische Darstellung einer stark gedämpften Schwingung
[Stoecker2000]
ausführen. Dieses System sei nun einer harmonischen veränderlichen Kraft ausgesetzt. Dabei ist zu beobachten, dass das System nach einer gewissen Einschwingzeit mit der Kreisfrequenz ω des Erregers schwingt und nicht mit der Eigenfrequenz ω0 des Oszillators. Es ergibt sich folgende Bewegungsgleichung:
mẍ + bẋ + kx = F0 sin(ωt)
(3.63)
Aus der Beobachtung sieht man, dass nach Ablauf der Einschwingzeit die Auslenkung x(t) durch eine harmonische Zeitfunktion mit der Kreisfrequenz ω beschrieben werden kann. Allerdings ist eine Phasenverschiebung φ zwischen Oszillator
und Erreger zu beoachten. Man erhält folgenden Lösungsansatz:
x(t) = A(ω) sin(ωt − φ(ω))
(3.64)
Für die zeitliche Ableitung der Auslenkung erhalten wir:
π
− φ)
2
ẍ = −ω 2 A sin(ωt − φ) = ω 2 A sin(ωt + π − φ)
ẋ = ωA cos(ωt − φ) = ωA sin(ωt +
(3.65)
(3.66)
Man erhält für die Auslenkung x(t), die Geschwindigkeit des Oszillators ẋ(t),
die Beschleunigung des Oszillator ẍ(t) und den Erreger selbst die in Tabelle 3.1
zusammengefassten Eigenschaften. Mit den Gleichungen 3.64 bis 3.66 ergibt sich
folgende Bewegungsgleichung:
mω 2 A sin(ωt + π − φ) + bAω sin(ωt +
π
− φ) + kA sin(ωt − φ) = F0 sin(ωt) (3.67)
2
Trägt man die Amplituden der einzelnen Anteile in ein sog. Zeigerdiagramm ein
(Abbildung 3.9), so sieht man beim Vergleich mit Gleichung 3.67, dass die Summe
58
3 Schwingungen
Abbildung 3.9: Zeigerdiagramm: Abhängigkeit der Amplituden bei einer erzwungenen Schwingung [Metag2000]
der Zeiger, die den Größen der linken Seite der Gleichung entsprechen, gleich dem
Zeiger auf der rechten Seite der Glecichung sein muss. Man erhält:
F02 = (kA − mω 2 A)2 + (bωA)2
p
(kA − mω 2 A)2 + (bωA)2
F0 =
(3.68)
(3.69)
Mit
k
m
b
1
β =
=
m
τ
ω02 =
(3.70)
(3.71)
erhält man für die Amplitude
A(ω) =
q
m
k
m
F0
2
− ω2 +
(3.72)
2
b
ω
m
F0
m
A(ω) = q
2
(ω02 − ω 2 ) + (βω)2
(3.73)
Größe
Zeitabhängigkeit
Erreger
F (t) = F0 sin(ωt)
F0
0
Auslenkung x(t)
x(t) = Ak sin(ωt − φ)
Ak
−φ
Geschwindigkeit ẋ(t)
ẋ(t) = Abω sin(ωt +
Beschleunigung ẍ(t)
2
Amplitude Phase rel. zu F0
π
2
− φ)
ẍ(t) = mAω sin(ωt + π − φ)
π
2
bAω
mAω
2
−φ
π−φ
Tabelle 3.1: Übersicht der Phasenlage bei einer erzwungenen Schwingung
3.7 Erzwungene Schwingungen
59
Für die Phasenverschiebung φ(ω) folgt:
bωA
=
kA − mω 2 A
βω
tan(φ(ω)) =
2
ω0 − ω 2
tan(φ(ω)) =
b
ω
m
k
m
−
ω2
=
ω02
βω
− ω2
(3.74)
(3.75)
Vergleicht man nun die Erregerfrequenz ω mit der Eigenfrequenz ω0 , so ergeben
sich drei Fälle:
Es sei ω << ω0
Es folgt für die Amplitude:
A(ω) =
Fo /m
F0
=
ω0
k
(3.76)
Für die Phasenbeziehung zwischen Oszillator und Erreger folgt:
βω
βω
=
≈0
ω02 − ω 2
ω02
⇒φ = 0
tan(φ) =
(3.77)
(3.78)
Man erhält also eine angenäherte Lösung:
x(t) =
F0
= sin(ωt)
k
(3.79)
Der Oszillator wird quasi ohne Rücksicht auf Reibung und Trägheit der Masse
von der äußeren Kraft hin und her gezerrt. Dies lässt sich dadurch erklären, dass
Abbildung 3.10: Abhängigkeit der Amplitude von ω bei einer Erzwungenen
Schwingung [Metag2000]
60
3 Schwingungen
Abbildung 3.11: Abhängigkeit der Phasen von ω [Metag2000]
die auftretenden Beschelunigungen und Geschwindigkeiten durch die kleine Errgegerfrequenz klein sind.
Es sei ω >> ω0
Für ω → ∞ folgt A → 0.
Für die Phasenbeziehung zwischen Oszillator und Erreger folgt dann:
tan(φ) =
β
βω
=
−
→0
ω02 − ω 2
ω
(3.80)
Für die Phasenverschiebung φ ergibt sich: φ = π.
Es sei ω ≈ ω0
Es ergibt sich eine maximale Amplitude, da der Nenner von Gleichung 3.73 minimal wird. Will man das Maximum von A(ω) bestimmen, so muss man Gleichung
3.73 nach ω ableiten und die Nullstelle der Ableitung bestimmen:
2(ω02 − ω 2 ) · (−2ω) + 2ωβ 2 = 0
1
−ω02 + ω 2 + β 2 = 0
2
s
ωres = ω0
1−
(3.81)
(3.82)
β2
< ω0
2ω02
(3.83)
Man sieht, dass sich bei einer gedämpften Schwingung Resonanzfrequnz ωres und
Eigenfrequnez ω0 unterscheiden. Ist die Dämpfung gleich Null und somit β = 0,
ist ωres = ω0 . Für die Amplitude im Resonanzfall gilt annähernd:
A(ω) =
F0 /m
βω0
(3.84)
3.8 Wellen
61
Das Verhältnis der Amplitude bei ω = ωres zu der Amplitude bei ω ≈ 0 ist gleich
F0
k
k
A(ω ≈ ω0 )
= m
=
= ω0 τ = Q
A(ω ≈ 0)
βω0 F0
mβω0
(3.85)
Q wird als Güte des Resonators bezeichnet bezeichnet.
Für die Phasenbeziehung zwichen Oszillator und Erreger folgt:
tan(φ) =
ω02
βω
βω
=
→∞
2
−ω
0
(3.86)
Für die Phasenverschiebung φ erhält man somit φ = π2 .
Beim Resonanzfall folgt also für die Geschwindigkeit:
ẋ(t) = Aω0 sin(ω0 t)
(3.87)
Demnach schwingen die äußere Kraft und die Geschwindigkeit gleichmäßig, so
dass im Resonanzfall nach P = F ẋ die maximale Energie pro Zeiteinheit vom
Erreger an den Resonator übertragen wird. Daher hat der Resonator bei ωres die
maximale Amplitude.
3.8 Wellen
Ene Welle ist eine in Raum und Zeit periodische Ausbreitung eines Schwingungszustandes, bei der der Energietransport ohne gleichzeitigen Massetransport stattfindet. Man kann sich eine Welle als unendlich viele miteinander gekoppelte Oszillatoren vorstellen. Der Schwingungszustand eines Oszillators hängt sowohl vom
Ort als auch von der Zeit ab. Man unterscheidet zwischen sog. Transversal- und
Longitudinalwellen:
• Bei einer Transversalwelle schwingen die Oszillatoren senkrecht zum Ausbreitungsvektor der Welle
• Bei einer Longitudinalwelle schwingen die Oszillatoren parallel zum Ausbreitungsvektor der Welle
Zwischen der Wellenlänge λ, der Geschwindigkeit c und der Frequenz einer Welle
besteht der wichtige Zusammenhang:
c=λ·f
(3.88)
62
3 Schwingungen
Abbildung 3.12: Schwingungsdauer und Wellenlänge einer harmonischen Welle
[Stoecker2000]
Abbildung 3.13: Ausbreitung einer Transversalwelle [Stoecker2000]
3.8.1 Die Wellenfunktion einer harmonischen Welle
Betrachtet man ein A-x-Diagramm, so gilt für die Elongation y des Oszillators
am Ort x:
x
y(x) = A sin 2π
λ
(3.89)
3.8 Wellen
63
Abbildung 3.14: Schematische Darstellung einer Longitudinalwelle [Stoecker2000]
Dies ist zu vergleichen mit der Auslenkung des Oszillators in Abhängigkeit von der
Zeit t: y(t) = A sin (ωt) = A sin 2π Tt . Dies Auslenkung y(x) von Gleichung 3.89
breitet sich mit der Geschwindigkeit v aus. Somit erhält man für eine Bewegung
in positiver x-Richtung:
x − vt
y(x, t) = A sin 2π
λ
x
vt
= A sin 2π − 2π
λ
λ
= A sin (kx − 2πf t)
= A sin (kx − ωt)
(3.90)
mit k =
2π
λ
Wellengleichung einer harm. Welle
(3.91)
(3.92)
(3.93)
k heißt Wellenzahl und hat die Dimension einer inversen Länge. Sie ist das Perdant zur Kreisfrequenz ω bei räumlicher Betrachtung.
64
3 Schwingungen
4 Hydrostatik
Gleichen sich alle Kräfte aus, einschließlich der Kräfte, die von den Gefäßwänden
ausgeübt werden, so bleibt ein Fluid in Ruhe. In diesem Fall spricht man von
der Hydrostatik. Im Gegensatz dazu beschreibt die Hydrodynamik strömende
Flüssigkeiten.
4.1 Druck
Als Druck versteht man die Wirkung der Kraft F~ auf eine Fläche A:
p~ =
FN
A
(4.1)
FN stellt hierbei die wirkende Normalkraft dar. Die Einheit des Drucks ist [p]= 1
N/m2 = 1 Pa (Pascal) = 10−5 bar. 1 bar ist ungefähr der normale Atmosphärendruck: 1 atm = 1013 mbar. In der Technik wird manchmal noch mit 1 kp/cm2 =
9, 81 · 104 N/m2 = 1 at (technische Atmosphäre) gerechnet.
4.2 Isotroper Druck
In Flüssigkeiten sind die Moleküle frei verschiebbar. Dies hat zur Folge, dass
Fluide keine Scherkräfte aufnehmen können und der Druck zu allen Seiten gleich
wirkt. Man sagt, der Druck ist isotrop1 (siehe Abb. ??).
1
unabhängig von der Richtung
66
4 Hydrostatik
Abbildung 4.1: Schematische Darstellung des isotropen Drucks in Flüssigkeiten
[Stoecker2000]
4.2.1 Kolbendruck und hydraulische Presse
Auf den Kolben in Abbildung 4.1 mit der Fläche A wirkt die Kraft F~ . Somit
herrscht in der Flüssigkeit der Druck p = F/A. Vernachlässigt man die Gewichtskraft der Flüssigkeit ist p überall gleich groß. In einer hydraulischen Presse, wie sie
in Abbildung 4.2 schematisch dargestellt ist, wirkt daher auf den großen Kolben
die Kraft F2 = pA2 während auf den kleinen Kolben lediglich die Kraft F1 = pA1
ausgeübt werden muss. Somit gilt:
F2
F1
=
A1
A2
(4.2)
Die hydraulische Presse spart zwar Kraft, aber keine Arbeit. Für die entlang des
Weges dx geleistete Arbeit dW gilt i.A. dW = F dx. Somit gilt für den kleinen
Kolben dW = F1 dx1 = pA1 dx1 = pdV . dV ist das Volumen der Flüssigkeit,
welches verschoben wurde. Im großen Kolben wird die gleiche Arbeit verrichtet,
so dass hier gilt dW = F2 dx2 = pA2 dx2 = pdV . Ganz allgemein erfordert eine
Volumenabnahme unter einem konstanten Druck p die Arbeit
dW = −pdV
Abbildung 4.2: Schematische
[Stoecker2000]
Darstellung
(4.3)
einer
hydraulischen
Presse
4.3 Der Schweredruck
67
Abbildung 4.3: Darstellung des hydrostatischen Paradoxons[Stoecker2000]
4.2.2 Kompressibilität
Eine Drucksteigerung um dp bewirkt eine Volumenabnahme −dV , die proportional zum Druck dp und zum Volumen V des Körpers ist:
= −κV dp
1 dV
κ = −
V dp
dV
(4.4)
(4.5)
Die Kompressibilität κ hat die Einheit eines reziproken Drucks.
4.3 Der Schweredruck
Eine Flüssigkeitssäule der Höhe h übt und der Querschnittsfläche A besitzt eine
Gewichtskraft FG = gm = gρV = gρAh. Sie übt daher einen Druck
p=
F
= gρh
A
(4.6)
auf ihren Boden aus. Betrachtet man Wasser mit einer Dichte ρ = 103 kg/m3
so herrscht in 10 m Tiefe allein durch die Wassersäule ein Druck von 1 bar. Der
gesamte Druck ergibt sich durch die Addition des Luftdrucks.
Der Bodendruck ist hierbei unabhängig von der Form des Gefäßes (siehe Abbildung ??). Man bezeichnet dies als hydrostatisches Paradoxon.
4.3.1 Manometer
Ein Quecksilbermanometer ist ein Gerät zur Messung von Drücken durch den
Vergleich mit dem Schweredruck einer Quecksilbersäule. Auf der einen Seite des
68
4 Hydrostatik
Abbildung 4.4: Schematische Dartsellung eines Manometers [Stoecker2000]
Abbildung 4.5: Schematische Darstellung der Auftriebskraft [Stoecker2000]
Manometers wirkt der zu messende Druck p und der Schweredruck der Quecksilbersäule gρh1 . Auf der anderen Seite wirkt ein Vergleichsdruck p0 und der
Schweredruck der anderen Flüssigkeitssäule gρh2 . Im Gleichgewicht gilt
p + gρh1 = p0 + gρh2
p − p0 = gρ(h2 − h1 )
(4.7)
(4.8)
Der Höhenunterschied h = h2 − h1 ist also proportional zum Druckunterschied.
Ist der Vergleichsdruck p0 gleich Null, was durch ein Vakuum realisiert werden
kann, so gilt:
p = gρh
(4.9)
4.3.2 Auftrieb - Das Prinzipn von Archimedes
Als Auftrieb versteht man eine der Erdanziehung entgegengerichtete Kraft auf alle
Körper, die einer Flüssigkeit (oder auch Gas) unter- bzw. eingetauscht sind. Der
4.3 Der Schweredruck
69
Abbildung 4.6: Dichtebestimmung nach Archimedes [Stoecker2000]
Auftrieb ergibt sich aus dem Unterschied zwischem dem Schweredruck p1 auf der
Oberseite des Körpers und dem Schweredruck p~2 auf der Unterseite des Körpers.
Für die Auftreibskraft FA gilt unter zur Hilfenahme von Abbildung 4.5:
FA = F2 − F1
(4.10)
= A(p2 − p1 )
(4.11)
= AρF g(h2 − h1 )
(4.12)
= ρF V g
(4.13)
= mg
(4.14)
= FG
(4.15)
Man sieht, dass die Auftriebskraft, die ein Körper in einer Füssigkeit oder in
einem Gas erfährt, gleich der Gewichtskraft des verdrängten Mediums ist. Dies
kann dazu genutzt werden, um die Dichte eines festen Körpers ρK zu bestimmen.
Dazu misst man die Gewichtskraft eines Körper in Luft und einmal wenn er sich
in einer Füssigkeit befindet. Für die Gewichtskraft in Luft gilt:
FL = ρK VK g
(4.16)
Hierbei wurde die Auftriebskraft durch die Luft vernachlässigt. Für die Gewichtskraft in der Flüssigkeit gilt:
FF l = ρK VK g − ρF l VK g = (ρK − ρF l )VK g
(4.17)
Dividiert man die beiden Gleichungen so erhält man:
ρK
FL
=
FF l
ρF − ρF l
ρF l
ρK =
1 − FFFLl
(4.18)
(4.19)
70
4 Hydrostatik
Eine Dichtebestimmung auf diese Art it nur möglich, wenn der Körper nicht
schwimmt, seine Dichte also größer ist die der verwendeteten Flüssigkeit.
5 Hydrodynamik
Jede organisierte Bewegung von nicht-festen Multiteilchensystemen wird als Fließen bezeichnet und durch die Hydrodynamik beschrieben. Dabei beschreibt sie
den Transport von Materie aufgrund von Druckdifferenzen und äußeren Kräften.
5.1 Ideale Strömung
Eine ideale Flüssigkeit weist die folgenden Eigenschaften auf:
• die Flüssigkeit ist inkompressibel
• es tritt in der Flüssigkeit keine innere Reibung (Viskosität) auf
• die Dichte ρ ist konstant
• es bilden sich beim Fließen keine Wirbel aus; man betrachtet also nur laminare Strömungen
Gleiches gilt für ein ideales Gas. Ist die Strömungsgeschwindigkeit bei Gasen
deutlich kleiner als die Schallgeschwindigkeit (ca. ein Drittel), so verhalten sich
auch Gase als praktisch inkompressibel.
5.1.1 Laminare Strömung
Bei einer laminaren Strömung gleiten einzelne Flüssigkeitsschichten endlicher Dicke mit verschiedenen Geschwindigkeiten übereinander hinweg, ohne sich stark
zu vermischen. Da sich die Flüssigkeit in die gleiche Richtung bewegt, bewegen sich die einzelnen Schichten mit unterschiedlichen Geschwindigkeiten. Beim
Aufeinandergleiten entstehen so Reibungskräfte, die zu einer gleichmäßigen Verringerung der Geschwindigkeit quer zum Strömungsprofil führen. Der Geschwin-
72
5 Hydrodynamik
Abbildung 5.1: Geschwindigkeitsprofil bei einer laminaren Strömung zwischen
zwei gegeneinander bewegten Platten [Stoecker2000]
Abbildung 5.2: Darstellung der Kontinuität von Flüssigkeiten [Stoecker2000]
digkeitsgradient dv/dx beschreibt den Unterschied der Geschwindigkeiten zweier
benachbarter Schichten bezogen auf die Dicke einer Schicht.
5.2 Kontinuitätsgleichung
Durchströmt eine Flüssigkeit bzw. ein Gas ein Rohr mit unterschiedlichen Querschnittsflächen, dann ist das transportierte Volumen in einem bestimmten Zeitintervall ∆t konstant. Es gilt:
V1 = A1 d1 = A1 v1 ∆t = A2 v2 ∆t = V2 = const
(5.1)
Aus Gleichung 5.1 erhält man die sog. Kontinuitätsgleichung:
A1 v1 = A2 v2
(5.2)
Sie drückt indirekt die Erhaltung der Masse aus. Das Produkt aus der Quer-
5.3 Bernoulli-Gleichung
Abbildung 5.3: Abbildung
73
zum
Verständnis
der
Bernoulli-Gleichung
[Stoecker2000]
schnittsfläche A und der Fließgeschwindigkeit v wird als Fluß φ bezeichnet. Für
den Fluß φ gilt also:
φ = A · v = const
(5.3)
5.3 Die Bernoulli-Gleichung
Das Gesetz von Bernoulli stellt einen Zusammenhang zwischen dem Querschnitt
eines Rohrs und dem in ihm herrschenden Druck her. Dabei unterscheidet man
zwischen dem
• statistischen Druck, der sowohl senkrecht als auch in Strömungsrichtung
gleichmäßig wirkt,
• dem Schweredruck
• und dem dynamischen Druck, der aufgrund der Strömung zusätzlich wirkt
und von der Strömungsgeschwindigkeit abhängt
Die Änderung der kinetischen Energie
1
1
1
1
∆E = mv22 − mv12 = m v22 − v12 = ρAv∆t v22 − v12
2
2
2
2 | {z }
=m
(5.4)
74
5 Hydrodynamik
ist gleich der Summe aus der Änderung der potentiellen Energie und der Arbeit,
die nötig ist, um das Volumen ∆V in der Zeit ∆t bei einer Druckdifferenz ∆p =
p1 − p2 durch das Rohr zu pressen. Dabei gilt für die Änderung der potentiellen
Energie
∆Epot = mg∆h = ρAv∆t g (h1 − h2 )
| {z }
(5.5)
=m
und für die geleistete Arbeit
W = (p1 − p2 ) ∆V = (p1 − p2 ) · v|{z}
· A ∆t
(5.6)
Ekin = Epot + W
1
ρAv∆t v22 − v12 = ρAv∆tg (h1 − h2 ) + (p1 − p2 ) vA∆t
2
1
1
p1 + ρv12 + ρgh1 = p2 + ρv22 + ρgh2
2
2
(5.7)
=const
Es gilt also
(5.8)
(5.9)
Daraus ergibt sich die Gleichung von Bernoulli:
1
p + ρv 2 + ρgh = const
2
(5.10)
Betrachten wir nun einige Spezaialfälle der Bernoulli-Glechung:
5.3.1 Flüssigkeit in Ruhe
Befindet sich die Flüssigkeit in Ruhe, so ist die Geschwindigkeit v = 0. Es gilt
somit
p + ρgh = const Pascal’s Gesetz
(5.11)
5.3.2 Horizontal fließende Flüssigkeit
Fließt eine Flüssigkeit horizontal durch ein Rohr mit unterschiedlichen Querschnitten, so ergibt sich für p2 folgendes:
1
1 2
A21
2
2
p2 = p1 + ρ v1 − v2 = p1 + ρv1 1 − 2
2
2
A2
(5.12)
Ist A1 > A2 so folgt P2 < P1 . Dieses Prinzip findet in einem Drosselgerät, dem sog.
5.3 Bernoulli-Gleichung
75
Abbildung 5.4: Schematische Darstellung eines Ventur-Rohrs [Stoecker2000]
Venturi-Rohr, Anwendung. Mit Hilfe des in Abbildung 5.4 abgebildeten Geräts
kann der Volumenstrom bzw. der Fluß φ bestimmt werden: Mit ∆p = p1 − P2
folgt für den Volumenstrom:
v
u
2∆p
u
φ = A1 · v1 = A1 · u 2
t
A1
ρ
−1
A2
(5.13)
Bei realen Strömungen muss die Reibung berücksichtigt werden. In der Praxis
erfolgt dies durch Korrekturfaktoren, die über Eichmessungen ermittelt werden.
5.3.3 Saugeffekte
Aufgrund der Gleichung von Bernuolli ist der statische Druck in einer Strömung
kleiner als der statische Druck in der Umgebung. Dies führt zu Saugeffekten bei
Strömungen.
Wasserstrahlpumpe
Die mit hoher Geschwindigkeit durch eine Düse ausströmende Flüssigkeit führt zu
einem verminderten statischen Druck, wodurch das Ansaugen eines Gases bewirkt
wird.
Hydrodynamisches Paradoxon
Eine ausströmendes Medium kann eine direkt auf die Ausströmöffnung gesetzte Platte ansaugen. Dies geschieht dann, wenn die Ausströmgeschwindigkeit so
76
5 Hydrodynamik
Abbildung 5.5: Schematische
Darstellung
einer
Wasserstrahlpumpe
[Stoecker2000]
groß ist, dass der äußere Druck größer wird als der verbleibende statische Druck
der zwischen Austrittsrohr und Platte strömenden Flüssigkeit. Aufgrund dieser
Tatsache ziehen sich zwei dicht nebeneinander fahrende Autos an.
5.4 Torricellisches Ausflussgesetz
Es soll nun die Ausflussgeschwindigkeit v einer Flüssigkeit aus einem kleinen Loch
im Mantel eines Gefäßes untersucht werden. Dazu vergleicht man ein Flüssigkeitsvolumen an einem beliebigen Punkt im Gefäß mit einem an der Austrittsöffnung.
Es gilt:
ρ
ρgh1 + p0 = ρgh2 + v 2 + p0
(5.14)
2
Hierbei stellt p0 den Atmosphärendruck dar. Die Geschwindigkeit des Flüssigkeitsvolumen auf der Höhe h1 sei fast Null. Formt man Gleichung 5.14 um, so
erhält man mit h = h1 − h2 für die Ausflussgeschwindigkeit:
p
v = 2gh
(5.15)
Für die Entfernung L zwischen Gefäß und Auftreffpunkt des Strahls gilt unter
√
Berücksichttigung des Prinzips des waagrechten Wurfs L = 2 h · h2 . Durch eine
analoge Vorgehensweise findet man die Ausströmgeschwindigkeit aus einem Rohr,
indem ein Überdruck p = pr − p0 gegenüber dem Außenraum herrscht. Es gilt
dann für die Auströmgeschwindigkeit:
r
v=
2p
ρ
(5.16)
5.5 Auftrieb
77
Abbildung 5.6: Schematische Darstellung zum Ausflussgesetz von Torricelli
[Stoecker2000]
5.5 Auftrieb
Ist ein Körper so geformt, dass die Umströmungsgeschwindigkeit auf der Oberseite
größer ist als auf der Unterseite, so erfährt der Körper durch den entstehenden
Druckunterschied eine Auftriebskraft. Für die Auftriebskraft gilt:
ρ
FA = cA Av 2
2
(5.17)
Die von der Ausrichtung des Flügels abhängige Proportionalitätskonstante cA
wird als Auftriebsbeiwert bezeichnet und ist dimensionslos.
Abbildung 5.7: Darstellung der Auftriebskraft bei einem Flügel [Stoecker2000]
5.6 Innere Reibung
Befindet sich zwischen einer festen Wand und einer bewegten Platte eine dünne
Flüssigkeitsschicht der Dicke x, so wird eine Kraft F benötigt, um die Platte mit
78
5 Hydrodynamik
der Fläche A mit konstanter Geschwindigkeit v zu verschieben:
F = ηA
v
x
(5.18)
Hierbei beschreibt η die sog. dynamische Viskosität der Flüssigkeit. Je größer die
Viskosität oder Zähigkeit einer Flüssigkeit ist, desto mehr Kraft ist nötig, um
die Schichten gegeneinander zu bewegen. Die Viskosität einer Flüssigkeit nimmt
steigender Temperatur stark ab. Die Einheit der Viskosität ist [η]=N s
−2
m.
In dem Spalt zwischen den ebenen Platten ändert sich die Ströumungsgeschwindigkeit linear mit der Koordinate x. Im Allgemeinen ist dieser Zusammenhang
nicht linear und man muss Gleichung 5.18 auf eine sehr dünne Schicht dx anwenden. Man erhält das sog. Newtonsche Reibungsgesetz:
F = ηA
dv
dx
(5.19)
Das Verhältnis aus dynamischer Viskosität η und der Dichte ρ der Flüssigkeit
wird als kinematische Viskosität ν bezeichnet:
ν=
η
ρ
(5.20)
5.6.1 Laminare Rohrströmung - Gesetz von Hagen-Poiseuille
In einem Rohr haftet die Flüssigkeit an seiner Innenseite und strömt in dessen
Mitte am schnellsten. Betrachtet man hierzu ein koaxiales Rohr mit dem Radius
r und der Länge l, so ergibt sich die folgende Reibungskraft:
FR = ηA
dv
dv
= η2πrl
dr
dr
(5.21)
Im stationären Fall ist diese Reibungskraft gleich der Druckkraft
Fp = Ap = πr2 (p1 − p2 ), so dass folgt:
dv
p1 − p2
=
r
dr
2ηl
(5.22)
Die Integration
Zv
0
p1 − p 2
dv =
2ηl
ZR
rdr
(5.23)
r
p 1 − P2 2
v(r) = v0 −
r
4ηl
(5.24)
5.7 Turbulente Strömungen
mit v0 =
79
p1 −p2 2
R .
4ηl
Durch den Hohlzylinder zwischen r und r + dr fließt der Volumenstrom
ZR
V̇ =
2πrv(r)dr =
π(p1 − p2 ) 4
R
8ηl
(5.25)
0
Gleichung 5.25 ist als Gesetz von Hagen-Poiseuille bekannt und besagt, dass bei
einem gleichen Druckgefälle der Volumenstrom durch ein Rohr mit doppelten
Radius 16mal größer ist.
5.7 Turbulente Strömungen
Von einer turbulenten Strömung spricht man, wenn Verwirbelungen der Flüssigkeit auftreten. Diese Verwirbelugen treten aufgrund von Reibung auf. Beim Umströmen einer Kugel ist der Druck dort am größten, wo die Oberfläche senkrecht
zur Strömung steht, während der Druck dort am kleinsten ist, wo die Kugeloberfläche parallel zur Strömung ist. Für die Geschwindigkeit der Flüssigkeitsteilchen
gilt dies entsprechend umgekehrt. Flüssigkeitsteilchen, die an der Kugel vorbeiströmen, werden zunächst abgebremst, wodurch ein Staudruck entsteht. Sie werden dann nach dem Prinzip von Bernoulli beschleunigt und zur Eingliederung in
die normale Strömung abgebremst. Durch die Reibung erhöht sich die Abbremsung, so dass die Teilchen noch vor der Eingliederung zur Ruhe kommen und ihre
Richtung umkehren. Es entstehen Verwirbelungen, die aufgrund der Drehimpulserhaltung paarweise mit entgegengesetzten Drehsinn auftreten.
Durch die reibung wird Energie verbraucht, die der Strömung der Flüssigkeit
durch eine zusätzliche Reibungskratf entzogen wird. Die Reibungskraft ist bei
einer turbulenten Strömung größer als bei einer laminaren Strömung.
5.7.1 Widerstandskraft
Die Widerstandskraft FW setzt sich aus der Reibungswiderstandskraft FR , die
bei laminarer Strömung zwischen Körperoberfläche und Flüssigkeit entsteht und
der Druckwiderstandskraft FD zusammen. Die Druckwiderstandskraft entsteht
durch die Wirbelbildung auf der Rückseite des Körpers. In den Wirbeln ist die
80
5 Hydrodynamik
Geschwindigkeit der Teilchen sehr schnell, so dass der statische Druck dort geringer als auf der Vorderseite ist. Es gilt:
1
(5.26)
FW = FR + FD = ρcw Av 2
2
wobei die Kosntante cw den Widerstandsbeiwert angibt. Dieser hängt von der
Form des Körpers ab.
Die Leistung P eines Körpers ergibt sich damit zu P = F v = 12 ρcw Av 3 . Bei einer
Verdopplung der Geschwindigkeit muss die Leistung um den Faktor 8 steigen.
5.8 Ähnlichkeitsgesetze
Ähnlichkeitsgesetze stellen eine Beziehung zwischen den strömungsmechanischen
Eigenschaften von verkleinerten bzw. vergrößerten Modellen zu deren Originalen
her. Dabei muss das Modell eine geometrische Ähnlichkeit besitzen, so dass die
geometrischen Abmessungen und die Oberflächenbeschaffenheit eine verkleinerte
Darstellung des Originals abgeben.
Zudem muss durch eine geeignte Wahl der Dichte, der Viskosität, Geschwindigkeit
der Flüssigkeit und Widerstandskraft im Modellversuch eine sog. hydrodynamische Ähnlichkeit geschaffen werden. Die Reynoldszahl Re beschreibt die hydrodynamische Ähnlichkeit:
Lρv
Lv
=
(5.27)
η
ν
Die Widerstandswerte zweier geometrisch ähnlicher Körper stimmen überein,
Re =
wenn die Reynoldszahlen identisch sind. Verkleinert man ein Modell, so muss
entsprechend die Geschwindigkeit v erhöht oder die kinematischen Viskosität ν
verringert werden.
5.8.1 Kritische Reynoldszahl
Die kritische Reynoldszahl stellt ein Kriterium für den Übergang von einer laminaren zu einer turbolenten Strömung dar. Überschreitet die Reynoldszahl einen
bestimmten Wert Rekrit , so wird die Strömung turbolent. In einer glatten Röhre
liegt Rekrit bei ca. 2000. Da aufgrund der Reibung die Strömungsgeschwindigkeit
auf einer Oberfläche klein ist, bildet sich auf dem Körper eine laminare Grenzschicht aus. Erst überhalb dieser Grenzschicht kommt es zu Verwirbelungen.
5.8 Ähnlichkeitsgesetze
Abbildung 5.8: Schematische Darstellung einer laminaren Grenzschicht
81
82
5 Hydrodynamik
6 Wärmelehre
Die Wärmelehre ist eine phänomenologische Theorie von Materie. Sie stellt die
Beschreibung einer ungeordneten Molekülbewegung dar.
6.1 Temperatur
Wärmeenergie ist die kinetische Energie einer ungeordneten Molekülbewegung.
Dabei haben keineswegs alle Teilchen die gleiche Energie. Dennoch ist ihre mittlere Energie W für alle Teilchen unabhängig von ihrer Masse gleich. Aus dieser
mittleren Energie
W = 12 mv 2
(6.1)
folgt, dass schwere Teilchen langsamer fliegen als leichte. Hierbei ist v die quadratisch gemittelte Geschwindigkeit der N Moleküle:
r
2
v12 + v22 + v32 + ... + vN
v2 =
N
(6.2)
Die Temperatur ist dabei nur ein anderes Maß für die mittlere kinetische Energie der Moleküle und ist daher ebenfalls eine skalare Größe. Berücksichtigt man
zunächst nur die Translationsenergie, so gilt:
W = 12 mv 2 = 32 kT
(6.3)
Die Boltzmann-Konstante k hat den Wert 1, 381 · 10−23 KJ . Würde man die Temperatur direkt in Joule messen, könnte man auf die Boltzmann-Konstante verzichten. Dies würde aber zu einer sehr unhandlichen Größe (1023 ) führen. Zudem
wird die Sonderstellung der Wärmeerscheinung durch die besondere Grundeinheit
Kelvin entsprechend hervorgehoben.
Aus Gleichung 6.3 folgt, dass es einen absoluten Nullpunkt gibt, der nicht unterschritten werden kann. Bei dieser Temperatur sind die Moleküle in völliger
84
6 Wärmelehre
Ruhe. Von hier aus zählt man die absolute Temperatur, die auch als Kelvin-Skala
bezeichnet wird. Ihre Einheit 1 K hat die gleiche Größe wie ein 1 ◦ C, das
1
100
des
Abstandes zwischen dem Gefrier- und Siedepunkt des Wassers unter 1 atm (=
1,013 bar).
Da die Temperatur eine skalare Größe ist, besitzt sie keine Richtung. Hängt die
Temperatur vom Ort ab, spricht man von einem Temperaturfeld T (~x) . Hängt
die Temperatur nur vom Ort ab und nicht von der Zeit, so spricht man von einem
stationären Temperaturfeld, andernfalls von einem instationären Feld T (~x, t).
Der Temperaturgradient ist ein Vektor, der in Richtung des größten Temperaturanstiegs zeigt. Für den Temperaturgradienten gilt:
∂T
∂x
grad T (~x) = ∇T (~x) = ∂T
∂y
(6.4)
∂T
∂z
Der Operator ∇ wird als Nabla-Operator bezeichnet.
6.1.1 Thermometer
Zur Temperaturmessung sind alle Größen geeignet, die in reproduzierbarer Weise
von der Temperatur abhängen. Eine Messung der Molekülgeschwindigkeit wäre
die direkteste Weise. Weit aus einfacher ist die Messung der Längenausdehnung
als Folge einer Temperaturerhöhung. Dies ist möglich, da die Länge l(T ) eines
Körpers linear von der Temperatur T des Körpers abhängt:
l(T ) = l0 (1 + αT )
(6.5)
α ist hierbei der lineare Ausdehnungskoeffizient mit der Einheit K−1 . Eisen hat
z.B. einen linearen Ausdehnungskoeffizienten von 12 · 10−6 K−1 .
Betrachtet man die Volumenänderung eines Körpers mit dem Volumen
V (T ) = l(T )3
(6.6)
= l03 (1 + αT )3
(6.7)
≈ l03 (1 + 3αT )
(6.8)
= V0 (1 + γT )
(6.9)
γ ist hierbei der sog.Raumausdehnungskoeffizient und es gilt γ = 3α. Quecksilber
besitzt z.B. einen Raumausdehnungskoeffizienten von γ = 181 · 10−6 K−1 .
6.1 Temperatur
85
Abbildung 6.1: Schematische Darstellung der Rotation eines zweiatomigen Moleküls [Tipler2009]
Neben Ausdehnungsthermometern finden auch häufig Widerstands- und Strahlungsthermoter Anwendung.
6.1.2 Freiheitsgrade
Moleküle können nicht nur Translationsenergie besitzen, sondern auch Rotationsund Schwingungsenergie. Jede solche unabhängige Bewegungsmöglichkeit nennt
man Freiheitsgrad. Die Translation besitzt demnach für jede der drei Bewegungsrichtungen einen Freiheitsgrad. Ein Vergleich mit Gleichung 6.3 zeigt, dass auf
jeden Freiheitsgrad die Energie
WF G = 21 kT
(6.10)
entfällt.
Auch die Rotation besitzt im Allgemeinen drei Freiheitsgrade. Ein zweiatomiges
Molekül, wie z.B. Sauerstoff, besitzt nur zwei Freiheitsgarde der Rotation. Die
Drehung um die z 0 -Achse in Abbildung 6.1 besitzt bei der Rotation eines zweiatomigen Moleküls aufgrund des kleinen Trägheitsmoments keine Energie. Allgemein
entfällt auf ein Molekül mit f Freiheitsgraden die mittlere Gesamtenergie
W = f2 kT
(6.11)
86
6 Wärmelehre
6.2 Wärme und Wärmeleitung
Wärme ist Energie, die an einer diathermen1 , wärmedurchlässigen Grenze zwischen Systemen verschiedener Temperaturen auftritt und allein durch den Temperaturunterschied ∆T = T2 − T1 ohne Arbeitsleistung zwischen den Systemen übertragen wird. Die Wärme Q wird dadurch übertragen, dass in der Zeit
∆t = t2 − t1 ein Wärmestrom Q̇ mit [Q̇] =W fließt: Wärme ist Energie, die an
einer diathermen2 , wärmedurchlässigen Grenze zwischen Systemen verschiedener
Temperaturen auftritt und allein durch den Temperaturunterschied ∆T = T2 −T1
ohne Arbeitsleistung zwischen den Systemen übertragen wird. Die Wärme Q wird
dadurch übertragen, dass in der Zeit ∆t = t2 −t1 ein Wärmestrom Q̇ mit [Q̇] =W
fließt:
Z
Q̇=const
t2
Q=
Q̇(t)dt
z}|{
= Q̇ · (t2 − t1 )
(6.12)
t1
Generell unterscheidet man zwischen stoffgebundenen (Leitung und Kobvektion)
und nicht stoffgebundenen Wärmetransport (Strahlung).
6.2.1 Wärmeleitung
Nach dem empirischen Fourier-Gesetz hängt die Wärmestromdichte ~q̇ linear vom
~ ab:
negativen Temperaturgradienten −∇T
~
~q̇ = −λ∇T
(6.13)
Hierbei bezeichnet der Materialkoeffizient λ mit [λ] =W/m K die spezifische
Wärmeleitfähigkeit . Der durch einen homogenen, quaderförmigen Körper fließende Wärmestrom Q̇ ist der Querschnittsfläche A und dem Temperaturunterschied
∆T = T2 − T1 proportional sowie antiproportional zu dessen Dicke d:
A
Q̇ = λ ∆T
d
(6.14)
Dies ist zur Illustration in Abbildung 6.2 schematisch dargestellt. Hierbei besteht
zwischen dem Wärmestrom Q̇ und der Wärmestromdichte q̇ folgender Zusammenhang:
q̇ =
1
2
dQ̇
dA⊥
Eine diatherme Grenze ist für Wärme durchlässig, lässt aber kein Gas hindurch
Eine diatherme Grenze ist für Wärme durchlässig, lässt aber kein Gas hindurch
(6.15)
6.2 Wärme und Wärmeleitung
87
Abbildung 6.2: Schematische Darstellung der Wärmeleitung
Elektrische Analogie
Analog zum elektrischen Widerstand Rel =
l
σ·A
kann der thermische Widerstand
Rth eines Körpers wie folgt definiert werden:
Rth =
d
λ·A
(6.16)
Bei dieser Analogiebetrachtung entspricht die Länge l des elektrischen Leiters der
Dicke d des wärmedurchflossenen Körpers, sowie die elektrische Leitfähigkeit σ
der thermischen Leitfähigkeit λ.
Vergleicht man den Temperaturunterschied ∆T mit der elektrischen Spannung U
und den Wärmestrom Q̇ mit dem elektrischen Strom I (Ladungsmenge pro Zeitintervall), so besteht die Möglichkeit, thermische Netzwerke analog zu elektrischen
Netzwerken zu berechnen, wobei die Regeln für Reihen- und Parallelschaltung
von Widerständen sowie die Kirchhoff-Gesetze analog anwendbar sind.
Bei einer thermischen Reihenschaltung fließt durch alle Widerstände Rth,i (i =
1, 2, 3, .., n) derselbe Wärmestrom Q̇:
Q̇ =
T2 − T3
Tn−1 − Tn
T1 − Tn
T1 − T2
=
= ... =
=
Rth,1
Rth,2
Rth,n
Rth,ges
(6.17)
Der thermische Gesamtwiderstand Rth,ges ergibt sich durch Addition der einzelnen
thermischen Widerstände Rth,i . In Analogie zu den elektrischen Gesetzmäßigkei-
88
6 Wärmelehre
Abbildung 6.3: Darstellung einer thermischen Reihenschaltung [Halliday2003]
ten ist es zweckmäßig den reziproken Wert des thermischen Widerstandes Rth als
Wärmeleitwert Lth zu definieren:
Lth =
1
λ·A
=
Rth
d
(6.18)
Somit kann der thermische Wärmeleitwert Lth als Proportionalitätskonstante für
den Wärmetransport bei einer gegebenen Temperaturdifferenz ∆T aufgefasst werden:
Q̇ = Lth · ∆T
(6.19)
Bei einer Parallelschaltung von thermischen Widerständen addieren sich die Wärmeleitwerte Lth,i der einzelnen thermischen Widerstände Rth,i :
Lth,ges =
n
X
Lth,i bzw.
i=1
1
Rth,ges
=
n
X
1
Rth,i
i=1
(6.20)
Hierbei tritt bei jedem thermischen Widerstand der gleiche Temperaturabfall auf:
∆T = Q̇i · Rth,i = ... = Q̇ges · Rth,ges
(6.21)
Die Summe der durch jeden einzelnen thermischen Widerstand Rth,i fließenden
Wärmeströme Q̇i ergibt den Gesamtwärmestrom Q̇ges :
Q̇ges =
n
X
i=1
Q̇i =
T1 − T2
Rth,ges
(6.22)
6.2 Wärme und Wärmeleitung
89
Sind aneinandergrenzende Bauteile nicht ideal miteinander verbunden, so sind
thermische Kontaktwiderstände zu berücksichtigen. Durch eine gegebene Oberflächenrauigkeit entstehen kleine Luftzwischenräume, die den Wärmestrom behindern. An der Kontaktstelle tritt so ein endlicher Temperaturabfall ∆T◦ auf,
der einen thermischen Kontaktwiderstand
Rth,c =
∆T◦
Q̇
(6.23)
zur Folge hat. Dieser Widerstand hängt u. a. von der Oberflächengüte, dem Spaltmedium (Wasser, Luft, Wärmeleitpaste etc.) und dem Anpressdruck ab. In der
K
Praxis treten Werte zwischen 2 · 10−6 und 2 · 10−3 W
auf.
6.2.2 Wärmedurchlasskoeffizient
Der Wärmedurchgangskoeffizient Λ wird häufig auch als Wärmedämmwert, UWert oder früher als k-Wert bezeichnet. Er ist ein Maß für den Wärmestromdurchgang durch eine ein- oder mehrlagige Materialschicht, wenn auf beiden Seiten verschiedene Temperaturen anliegen. Dabei gibt er die Energie pro Zeiteinheit
an, die durch eine Fläche A fließt, wenn sich die beidseitig anliegenden Lufttemperaturen stationär um ∆T = T2 − T1 unterscheiden. Es gilt:
Λ=
λ
d
(6.24)
Dicke in cm
U-Wert in W/(m2 K)
Außenwand aus Beton
25
3,3
Außenwand aus Mauerziegl
40
0,8
Außenwand aus Porenbeton
40
0,2
Holzständerbauweise
25
0,15 - 0,2
Einfachfenster
0,4
6
Bauteil
Wärmeschutzverglasung
Passivhausfenster
1,3
0,5 - 0,8
Tabelle 6.1: Wärmedurchgangskoeffizient verschiedener Baustoffe
90
6 Wärmelehre
6.2.3 Konvektion
Konvektion wird auch als Wärmemitführung in einem strömenden Fluid oder Gas
aufgrund einer makroskopischen Teilchenbewegung bezeichnet. Dabei unterscheidet man zwischen erzwungener Konvektion (Einsatz von Ventilatoren) und freier
(natürliche) Konvektion. Hierbei ist der Wärmestrom proportional zur übetragenen Fläche A und zum Temperaturunterschied ∆T zwischen Fläche und Fluid:
Q̇ = αK A · ∆T
(6.25)
Der Wärmeübertragungskoeffizient αK mit [αK ] = W/(m2 K) hängt von vielen Parametern ab und kann nur mit großem Aufwand berechnet werden. In
der Praxis bedient sich daher oft der Ähnlichkeitstheorie (vgl. Reynoldszahl).
Der Wärmetransportwiderstand αK beträgt bei siedenden Wasser 2000 - 25000
Freie Konvektion
αK in W/(m2 K) Erzw. Konvektion αK in W/(m2 K)
Gase
3 - 20
Gase
10 - 100
Wasser
100 - 600
Wasser
500 -10000
Tabelle 6.2: Wärmetransportwiderstand bei Wasser und Gasen
W/(m2 K), bei kondensierenden Wasser 5000 - 100000 αK W/(m2 K).
6.2.4 Wärmestrahlung
Wärmestrahlung stellt einen nicht-stoffgebundenen Energiestransport durch elektromagnetische Strahlung dar. Wärmestrahlung kann somit auch im Vakuum erfolgen. Die langwellige Wärmestrahlung ist für das menschliche Auge nicht sichtbar und kann mittels Thermografie sichtbar gemacht werden. Dabei findet die
thermische Strahlung zwischen zwei Körperoberflächen statt, wobei die beiden
Oberflächen nach dem Sender-und-Empfänger-Prinzip Strahlung emittieren und
absorbieren. Das Stefan-Boltzmann-Gesetz beschreibt den hierbei auftretenden
Nettowärmestrom:
Q̇ = σ · A T14 − T24
(6.26)
Die Stefan-Boltzmann-Konstante σ hat den Wert 5, 67 · 10−8 W/(m2 K4 ). Es ist
zu betonen, dass die Temperatur in der vierten Potenz in das Strahlungsgesetz
eingeht.
6.3 Wärmeleitungsgleichung
91
6.3 Wärmeleitungsgleichung
Betrachtet man die Temperaturverteilung eines Festkörpers, so liegt im Allgemeinen ein mehrdimensionales und zeitabhängiges Temperaturfeld T (~x, t) vor. Aus
der Energiebilanz eines infinitesimalen Volumens lässt sich die allgemeine Fourier’sche Wärmeleitungsdifferenzialgleichung herleiten. Diese beschreibt den instationären Wärmetransport in einem homogenen Festkörper mit inneren Wärmequellen. Sie lautet für konstante Stoffwerte λ, ρ, und cp :
2
∂ T
Ėq
∂ 2T
∂ 2T
∂T
=D·
+
+ 2 +
2
2
∂t
∂x
∂y
∂z
ρ · cp
(6.27)
Der Koeffizient
λ
(6.28)
ρ · cp
wird als Tempearturleitfähigkeit bzw. als thermische Diffusivität bezeichnet, bei
D=
der ρ die Massendichte und cp die isobare Wärmekapazität darstellen. Es ist
möglich, mit Hilfe der Laser-Flash-Methode die thermische Diffusivität D und
somit die Wärmeleitfähigkeit λ zu bestimmen. Die volumenbezogene Dichte der
inneren Wärmequellen Ėq resultiert ggf. aus Ohm’schen Verlusten, der Rekombinationswärme bei Halbleitern und dem Peltier-Effekt.
= 0) ohne Wärmequellen
Handelt es sich um eine stationäre Wärmeleitung ( ∂T
∂t
(Ėq = 0) gilt die sog. Laplace’sche Differenzialgleichung:
∇2 T = ∆T = 0
(6.29)
6.4 Wärmekapazität
Um einen Körper von der Temperatur T1 auf die Temperatur T2 zu erwärmen,
muss man ihm Energie zuführen. Wie viel, folgt direkt aus Gleichung 6.11, wenn
man weiß, wie viele Moleküle der Körper enthält. Ein homogener Körper der
Masse M enthält M/m Moleküle der Masse m. Um jedes dieser Moleküle von T1
auf T2 zu erwärmen, benötigt man die Energie
∆W = 12 f k(T2 − T1 )
(6.30)
Insgesamt benötigt man also die Energie
∆W =
Mf
k∆T
m2
(6.31)
92
6 Wärmelehre
Das Verhältnis
Mf
∆W
=
k
(6.32)
∆T
m2
bezeichnet man als die Wärmekapazität des Körpers. Die spezifische WärmekaC=
pazität
C
fk
=
(6.33)
M
2m
gibt die benötigte Energie in J an, um 1 kg des Körpers um 1 K zu erwärmen.
c=
Um einen Körper der Masse M beispielsweise von der Temperatur T1 auf die
Temperatur T2 zu erwärmen, benötigt man demnach die Wärmeenergie:
∆W = cM (T2 − T1 ) = cM ∆T
(6.34)
Für die Einheit der Wärmekapazität gilt [C] =J/(kg K).
Wasser besitzt eine spezifische Wärmekapazität von 4185 J/(kg K). Die Energie
4,185 J, die man benötigt um 1 g Wasser um 1 K zu erwärmen, heißt 1 cal.
Als molare Wärmekapazität bezeichnet man die Energie, die benötigt wird, um
ein Mol eines Stoffes um 1 K zu erwärmen. Nach den vorherigen Überlegungen
müsste die molare Wärmekapazität für alle Stoffe mit der gleichen Anzahl an
Freiheitsgraden gleich sein. Nach der Regel von Dulong und Petit gilt:
Cmol = NA f2 k = 3NA k = 24, 9J/(mol · K)
(6.35)
6.5 Anfangs- und Randbedingungen
Anfangsbedingung
Eine Anfangsbedingung ist eine zeitliche Bedingung, die nur bei instantionären
Wärmetransportvorgängen auftritt. Sie beschreibt dabei die Temperaturverteilung T (x, y, z, t0 ) in allen Punkten des Körpers zur Zeit t0 .
Randbedingung
Randbedingungen sind örtliche Bedingungen, die sowohl bei instationärer als auch
bei stationärer Wärmeleitung auftreten. Bei der sog. Randbedingung 1. Art (Dirichlet’sche Randbedingung) handelt es sich um eine Temperaturvorgabe am jeweiligen Rand des Körpers:
T (x = x0 , y, z, t) = T0 (y, z, t)
(6.36)
6.6 Kinetische Gastheorie
93
Bei der Randbedingung 2. Art (Neumann’sche Randbedingung) ist der Temperaturgradient und damit die Wärmestromdichte q̇ gegeben:
q̇(x0 , y, z, t) = −λ ·
∂T (x, y, z, t)
|x=x0
∂x
(6.37)
Die Randbedingung 3. Art (Newton’sche Randbedingung) kennzeichnet den Wärmeübergang von einer festen Oberfläche an ein Fluid der Temperatur T∞ :
α · (T∞ − T (x = x0 , t)) = −λ ·
∂T (x, t)
|x=x0
∂x
(6.38)
6.6 Kinetische Gastheorie
Wie wir bereits wissen, ist Wärme eine ungeordnete Molekülbewegung. Treffen
Moleküle auf eine Wandfläche, so wird auf diese eine Kraft ausgeübt. Nach den
Gesetzen der Mechanik ist diese Kraft gleich dem an die Wand übertragenen
Impuls pro Zeiteinheit:
dp
dt
dp
p =
A · dt
F =
(6.39)
(6.40)
Nimmt man hierbei an, dass im Durchschnitt jedes dritte Molekül der N Moleküle
senkrecht zur Wand fliegt, so fliegt ein sechstel der Moleküle auf die Wand zu. Alle
Moleküle mit dieser Flugrichtung, die in einem Volumen dV mit der Grundfläche
A und der Länge v · dt enthalten sind, erreichen in der Zeit dt die Wand. Mit der
Teilchendichte n:
n=
N
⇔N =n·V
V
(6.41)
treffen dann
1
N
6
=
1
nV
6
(6.42)
=
1
nAvdt
6
(6.43)
Moleküle innerhalb der Zeit dt auf die Wand. Man erhält daraus die Stoßzahl z
pro Flächen- und Zeiteinheit:
z=
n
1 nAvdt
= v
6 Adt
6
(6.44)
94
6 Wärmelehre
Da jedes Molekül beim Aufprall und der nachfolgenden Reflexion 2mv an Impuls
überträgt, ergibt sich pro Flächen- und Zeiteinheit der folgende Impulsübertrag:
1
n
v2mv = nmv 2
6
3
Für den Druck ergibt sich unter Berücksichtigung von Gleichung 6.40:
(6.45)
z2mv =
1
p = nmv 2
3
(6.46)
Da sich die Moleküle alle mit einer unterschiedlichen Geschwindigkeit bewegen,
ersetzt man v 2 durch die quadrierte mittlere Geschwindigkeit v 2 :
1
p = nmv 2
3
(6.47)
Mit Gleichung 6.3 folgt:
1 2
3
mv =
kT
2
2
1 2
kT =
mv
3
(6.48)
(6.49)
Somit ergibt sich für den Druck:
p = nkT
Gleichung 6.50 wird als Grundgleichung der kinetischen Gastheorie
(6.50)
3
bezeich-
net.
6.7 Zustandsgleichung idealer Gase
Eine Zustandsgleichung eines Systems beschreibt wie seine messbaren Eigenschaften voneinander abhängen. Der Zustand einer Gasmasse M ist durch die Temperatur T , den Druck p und durch das Volumen V vollständig beschrieben. Hierbei
können zwei Größen unabhängig voneinander kombiniert werden. Die dritte Größe
ist dann durch die beiden anderen Größen eindeutig festgelegt. Dies sieht man
durch die Umformung:
p = nkT
pV
3
nach Daniel Bernoulli
= N kT
(6.51)
(6.52)
6.8 Hydrostatische Grundgleichung
95
Betrachtet man ein Gasvolumen mit ν Mol, so besteht die Gasmenge aus νNA
Molekülen. Es gilt:
pV = νNA kT
(6.53)
Zur Abkürzung wurde die Gaskonstante R eingeführt, für die gilt:
R = NA k = 8, 31 J/(K mol)
(6.54)
pV = νRT
(6.55)
Damit ergibt sich:
Gleichung 6.55 wird als das Gasgesetz idealer Gase bezeichnet. Bei einem idealen
Gas üben die Teilchen keine Kräfte aufeinander aus und besitzen selbst kein
merkliches Eigenvolumen.
6.8 Hydrostatische Grundgleichung
Die hydrostatische Grundgleichung beschreibt die Änderung von Druck und Dichte in Abhängigkeit von der Höhe h. Zu deren Herleitung betrachtet man ein
Volumenelement dV mit der Grundfläche A und der Höhe dh: dV = A·dh.
Aufgrund der geringen Höhe dh des Volumenelements dV kann man eine konstante Dichte der Luft ρ annehmen. Durch den atmosphärischen Druck wirkt
von unten eine Kraft p · A auf das Volumenelement. Die Kraft, die von oben
auf dieses Volumenelement wirkt, setzt sich aus der Gewichtskraft der Luft innerhalb des Volumenelements und der von unten wirkenden Kraft zusammen:
dmg + p · A = dV ρg + p · A = dhAρg + pA. Der atmosphärische Druck und damit
die Kraft hat sich durch den Höhenunterschied dh wie folgt geändert: (p − dp)A.
Im hydrostatischen Gleichgewicht heben sich die wirkenden Kräfte auf. Es gilt:
pA + dhAρg = (p − dp)A
(6.56)
pA = pA − dpA − dhAρg
(6.57)
dp
= −ρg
(6.58)
dh
Nach dem idealen Gasgesetz 6.55 kann man die Dichte wie folgt ersetzen:
pV
pM
ρ
= νRT
(6.59)
= RT
(6.60)
pM
RT
(6.61)
ρ =
96
6 Wärmelehre
m
.
ν
Dabei ist M die mittlere molare Masse mit M =
Es folgt:
dp
pM g
=−
dh
RT
(6.62)
Die hydrostatische Grundgleichung beschreibt die Druckänderung dp in Abhängigkeit von einer Höhenänderung dh. Durch das negative Vorzeichen wird die Abnahme des Drucks bei zunehmender Höhe deutlich.
6.9 Barometrische Höhenformel
Zur Herleitung der barometrischen Höhenformel trennt man die hydrostatische
Grundgleichung nach Variablen:
dp
p
Z p(h)
dp
p(h ) p
0 p(h)
ln
p(h0 )
p(h)
p(h0 )
Mg
dh
RT
Z
Mg h
= −
dh
RT h0
Mg
(h − h0 )
= −
RT
= −
Mg
= e− RT (h−h0 )
Mg
p(h) = p(h0 )e− RT h
(6.63)
(6.64)
(6.65)
(6.66)
(6.67)
h0 kann gleich Null gesetzt werden, wenn man es als Höhe des Meeresspiegels
mit h0 = 0 definiert. Demnach ist p(h0 ) der Luftdruck auf Meereshöhe. Die barometrische Höhenformel wurde unter der Annahme einer isothermen4 Luftsäule
hergeleitet und ist daher nicht exakt.
6.9.1 Atmosphärischer Druck bei linearen Temperaturverlauf
Messungen der Temperatur in verschiedenen Höhen haben ergeben, dass die Temperaturabnahme mit zunehmender Höhe durch einen linearen Temperaturverlauf
beschrieben werden kann. Im Mittel nimmt die Luft um 0,65 K pro 100 m Höhe
ab. Der Hauptgrund für die Temperaturabnahme ist die Erwärmung des Erdbodens durch die Sonne und die dadurch resultierende Wärmeabstrahlung an
4
Luftsäule mit einer konstanten Temperatur
6.10 Das Gesetz von Boyle-Mariotte
97
die unteren Luftschichten. Die oberen Luftschichten geben ihre Wärme an den
Weltraum ab. Für eine lineare Temperaturabnahme kann man folgenden Ansatz
machen:
T (h) = T (h0 ) − a · (h − h0 )
(6.68)
Hierbei gibt a den Temperaturgradienten an, der die Temperaturänderung pro
Meter Höhenunterschied beschreibt. Mit Hilfe von Gleichung 6.63 folgt:
Z h
Mg
dp
=
−
dh
p
h0 RT
Z p(h)
Z h
dp
Mg
=
−
dh
p(h0 ) p
h0 R (T (h0 ) − a · (h − h0 ))
Z
p(h)
Mg h
1
ln
=
−
dh
p(h0 )
R h0 (T (h0 ) + ah0 ) − ah)
p(h)
Mg
T (h0 ) − a(h − h0 )
ln
=
ln
p(h0 )
Ra
T (h0 )
y·ln(x)
y
Mg
e
=x
a∆h Ra
z}|{
p(h)
=
p(h0 ) 1 −
T (h0 )
(6.69)
(6.70)
(6.71)
(6.72)
(6.73)
Leitet man diese Beziehung gemäß Gleichung 6.58 nach der Höhe h ab, so erhält
man für die Dichte:
M g −1
a∆h Ra
ρ(h) = ρ(h0 ) 1 −
T (h0 )
(6.74)
6.10 Das Gesetz von Boyle-Mariotte
Das Gesetz von Boyle-Mariotte besagt, dass bei konstanter Temperatur Druck
und Volumen antiproportional zueinander sind:
1
(T = const)
(6.75)
V
Das Gesetz von Boyle-Mariotte hat in der Tauchphysik eine besondere Bedeutung.
p∝
Taucht man z.B. ohne Gerät in 10 m Tiefe ab, so herrscht dort ein Druck von 2
bar. Der Druck hat sich damit verdoppelt, während sich das Volumen der Lunge
halbiert hat. Benutzt man dagegen einen Lungenautomaten, so presst dieser mit
dem Umgebungsdruck Luft in die Lunge. Atmet man in 10 m Tiefe voll ein und
taucht dann ohne auszuatmen an die Oberfläche, so vergrößert sich das Volumen
der Lunge bis sie reißt. Daher ist beim Auftauschen mit Lungenautomat immer
auf ein ständiges Ausatmen zu achten.
98
6 Wärmelehre
6.11 Das Gesetz von Gay-Lussac
Das Gesetz von Gay-Lussac besagt, dass bei kostantem Volumen der Druck mit
der Temperatur steigt:
p∝T
(V = const)
(6.76)
Dazu ließ Gay-Lussac Gas von einem Behälter in einen zweiten Behälter fließen.
In dem Behälter, der sich füllte, stieg die Temperatur an, während sie in dem
Behälter, dessen Druck sank, abnahm.
6.12 Das Gesetz von Charles
Bei konstantem Druck sind Volumen und Temperatur proportional zueinander:
T ∝V
(p = const)
(6.77)
6.13 Der 1. Hauptsatz der Wärmelehre
Führt man einem System die Wärmemenge ∆Q zu, so kann sie teilweise für
eine Arbeit −∆W verbraucht werden. Die restliche Wärmemenge führt zu einer
Steigerung der inneren Energie U des Systems um ∆U :
∆Q = ∆U − ∆W
(6.78)
Ist ∆W < 0, so wird vom System Arbeit geleistet, ist ∆W > 0, so wird am System
Arbeit verrichtet. Für ein ideales Gas lautet der erste Hauptsatz der Wärmelehre:
∆Q = cM ∆T − p∆V
(6.79)
6.13.1 Innere Energie
Als innere Energie bezeichnet man die Summe verschiedener Energieformen, die
die Moleküle besitzen können. Dazu zählt die Summe aus potentieller, kinetischer Rotations-, Schwingungs- und Spannenergie. Darin ist zum Teil die chemische Energie in Form von Bindungskräften bereits enthalten. Hinzu kommt
6.14 Aggregatzustände
99
der kernphysikalische Anteil, der die potentielle Energie bezeichnet, die in den
Atomkernen vorhanden ist und die bei Kernzerfällen, Kernspaltungen und Kernfusionen freigesetzt werden kann. Desweiteren können die Wechselwirkungen von
magnetischen und elektrischen Elementardipolen und induzierter Polarisation mit
elektrischen und magnetischen äußeren Feldern einen Beitrag zur inneren Energie
leisten.
6.13.2 Druckarbeit
Wieviel Arbeit ein Gas leistet, hängt von der Art der Zustandsänderung ab. Es
gilt:
W = pdV
(6.80)
Bei isobarer Expansion ergibt sich demnach:
∆W = p∆V
(6.81)
Bei einer adiabatischen Expansion ändert sich die Temperatur. Demnach gilt:
W = U1 − U2 = cM (T1 − T2 )
(6.82)
Bei einer isothermen Expansion gilt:
ZV 2
W = νRT
V2
dV
= νRT .
V
V1
(6.83)
V1
Bei isochoren (dV = 0) Zuständsänderugen wird keine Arbeit geleistet.
6.14 Aggregatzustände
Alle Stoffe können in drei5 unterschiedlichen Aggregatzuständen vorkommen. Dies
sind fest, flüssig und gasförmig. An dieser Stelle soll das Gleichgewicht zwischen
solchen Zuständen sowie der Übergang zwischen diesen beschrieben werden.
5
unter Extrembedingungen gibt es weitere Aggregatzustände wie z.B. das Plasma oder das
Bose-Einstein-Kondensat
100
6 Wärmelehre
6.14.1 Der Partialdruck
Der Gesamtdruck eines Gasgemischs ergibt sich aus der Summe aller durch Impulsübertrag auf eine Fläche ausgeübten Kräfte:
p=
F
A
(6.84)
Der Partialdruck pi einer Teilchensorte ist dagegen die Summe aller durch den
Impulsübertrag dieser bestimmten Teilchensorte auf eine Fläche A ausgeübten
Kraft:
Fi
(6.85)
A
Sie Summe aller Partialdrücke eines Gasgemisches mit K verschiedenen Kompopi =
nenten ergibt den Gesamtdruck:
p=
K
X
pi
(6.86)
i=1
6.14.2 Der Dampfdruck - die Koexistenz von Flüssigkeit und
Dampf
Bringt man eine Flüssigkeit in ein zuvor evakuiertes Gefäß ein, so dass die Flüssigkeit dieses nicht ganz ausfüllt, so verdampft ein Teil der Flüssigkeit. Der Druck der
sich dabei im Gefäß einstellt, wird als Sättigungsdampfdruck bezeichnet. Beim
Sättigungsdampfdruck sind die beiden Aggregatzustände flüssig und gasförmig
im Gleichgewicht. Um ein Molekül aus der Flüssigkeit zu bringen, muss Arbeit
aufgebracht werden. Besitzen die Moleküle eine genügend große kinetische Energie, können sie aus der Flüssigkeit austreten. Im Gleichgewicht treten genauso
viele Moleküle ein wie aus.
Sieden
Ist der Dampfdruck einer Flüssigkeit gleich dem darauflastenden Druck eines Gases, so siedet die Flüssigkeit. Dann entstehen nicht nur Blasen auf der Oberfläche
sondern auch im Inneren der Flüssigkeit. Z.B. riskieren Taucher, die zu schnell
auftauchen, das Ausdampfen der im Blut gelösten Gase (Caisson-Krankheit). Dabei perlt die zuvor ins Blut gepresste Luft aus.
6.14 Aggregatzustände
101
Abbildung 6.4: Dampfdruckkurve des Wassers [Stoecker2000]
Hygrometrie
Luft ist i.A. nicht mit Wasserdampf gesättigt. Zwar bildet sich in einem geschlossenen Raum der Sättigungsdruck aus, dies dauert aber sehr lange, da der Wasserdampf durch die gesamte Luft hindurchdiffundieren muss. Bei häufigen Luftmassenwechsel wird daher der Sättigungsdruck (fast) nie erreicht. Als absolute
Feuchte wird die Konzentration des Wasserdampfes in g/m3 bezeichnet. Die relative Feuchte ist der Quotient aus absoluter Feuchte und der Sättigungsfeuchte
(absolute Feuchte beim Sättigungsdruck). Kühlt sich Luft mit einer absoluten
Feuchte so stark ab, dass sie die Dampfdruckkurve erreicht oder überschreitet,
scheidet sich Wasser in Form von Tau oder Nebel ab.
Verdampfungswärme
Treten Moleküle aus der Flüsigkeit aus, so müssen sie Arbeit gegen die Anziehungskräfte leisten, die die Flüssigkeit zusammenhalten. Da nur langsame Moleküle zurückbleiben, kühlt sich die Flüssigkeit ab. Soll die Temperatur konstant
bleiben, muss man der Flüssigkeit die spezifische Verdampfungsenergie λ hinzuführen. Für Wasser beträgt λ = 2253 J/g.
102
6 Wärmelehre
Abbildung 6.5: Sättigungskurve von Wasserdampf [Stoecker2000]
6.14.3 Koexistenz von Festkörper und Flüssigkeit
Für das Schmelzen gelten ähnliche Gesetze wie für das Sieden. Bei der sog.
Schmelztemperatur sind die beiden Aggregatzustände fest und flüssig im Gleichgeicht. Um sich aus der festen Kristallstruktur lösen zu können, benötigen die
Moleküle Energie, die sie dem Kristall entziehen. Die Temperatur sinkt dadurch
ab. Soll die Temperatur kosntant bleiben, so muss die sog. Schmelzenergie hinzugeführt werden. Sie beträgt bei Wasser 333,5 kJ/kg.
6.14.4 Koexistenz dreier Phasen
Trägt man die Übergänge fest-flüssig (Schmelzdruckkurve), flüssig-gasförmig (Dampfdruckkurve) und fest-gasförmig (Sublimationskurve) in einem p,T-Diagramm
ein, so erkennt man die Existenz eines sog. Tripelpunktes, bei dem alle drei Phasen im Gleichgewicht miteinander stehen. Dies ist für Wasser bei 273,16 K und
610,6 Pa.
6.14 Aggregatzustände
103
Abbildung 6.6: Phasendiagramm von Wasser [Tipler2009]
6.14.5 Der kritische Punkt
Beim kritischen Punkt haben sich die Dichten von flüssiger und Gasphase eines
Stoffes angeglichen. Die Unterschiede zwischen beiden Aggregatzuständen hören
an diesem Punkt auf zu existieren. Somit stellt der kritische Punkt im Phasendiagramm das obere Ende der Dampfdruckkurve dar. Überkritische Fluide kombinieren das hohe Lösevermögen von Flüssigkeiten mit der niedrigen Viskosität
ähnlich den Gasen. Daher wird überkritisches Wasser z.B. benutzt, um Fette aus
Fleisch herauszulösen. Da sich viele verschiedene Substanzen im Fett ablagern,
werden mit dieser Methode Medikamente und andere Substanzen aus dem Fleisch
extrahiert und nachgewiesen.
104
6 Wärmelehre
7 Optik
Die Strahlenoptik beschreibt sehr einfach einige Züge der Lichtausbreitung. Die
Mechanismen der Reflexion und Brechung werden erst durch das Wellenbild klar.
Allem, was mit Beugung, Polarissation usw. zusammenhängt, steht die Strahlenoptik hilflos gegenüber.
7.1 Reflexion
An der Grenzfläche wird ein Lichtstrahl ganz oder teilweise reflektiert. Alle Strahlen werden so reflektiert, als kämen sie vom (virtuellen) Spiegelbild. Das Spiegelbild liegt ebensoweit hinter dem Spiegel wie der Gegenstand davor. Für die Konstruktion des Spiegelbildes bedient man sich dem optischen Lot, welches senkecht
auf der Oberfläche des Gegenstandes steht. Als Einfallswinkel α bezeichnet man
den Winkel zwischen auftreffenden Strahl und Lot, während der Ausfallswinkel
β den Winkel zwischen reflektierten Strahl und Lot darstellt. Zwischen Einfallsund Ausfallswinkel gilt die Beziehung:
α = α0
(7.1)
Abbildung 7.1: Schematische Darstellung eines Spiegelbildes [Tipler2009]
106
7 Optik
Abbildung 7.2: Schematische Darstellung von Reflexion und Brechung
7.2 Brechung
An einem optischen Übergang wird ein Teil des Lichtstrahls reflektiert während
der andere Teil in das zweite Medium eintritt (siehe Abb. 7.2). Dabei erfährt der
gebrochene Strahl eine Richtungsänderung, die auf die unterschiedliche Ausbreitungsgeschwindigkeit c2 in Medium 2 im Vergleich zu Medium 1 mit c1 zurückzuführen ist. Die sog. Brechzahl n gibt an, um wieviel langsamer das Licht im
Medium (cm ) im Vergleich zum Vakuum (c0 ) läuft:
n=
c0
>1
cm
(7.2)
Verglicht man zwei Medien miteinander, so bezeichnet man das Medium mit
der höheren Brechzahl als optisch dichter. Zur Herleitung des Brechungsgesetzes
betrachtet man einen optischen Übergang, wie er in Abbildung 7.3 dargestellt
ist. Dabei legt der gebrochene Strahl in der Zeit ∆t den Weg AE = c1 ∆t zurück,
während der noch nicht gebrochene Strahl in der selben Zeit die Strecke DB =
c2 ∆t zurücklegt. Es gilt:
c1 ∆t
AB
c2 ∆t
sin(β) =
AB
sin(α) =
(7.3)
(7.4)
Löst man beide Gleichungen nach AB auf und setzt sie gleich, erhält man das
Brechungsgesetz nach Snellius:
sin(α)
c1
=
sin(β)
c2
(7.5)
7.2 Brechung
107
Abbildung 7.3: Das Berchungsgesetz nach Snellius
Mit Gleichung 7.2 erhält man:
sin(α)
n2
=
sin(β)
n1
(7.6)
Ändert sich n nicht sprunghaft sondern allmählich, z.B. in einer Lösung, erhält
man anstatt einen Knick eine Krümmung. Zur Vermeidung von Fehlern ist daher
die Dichtebestimmung der Luft für die Astronomie sehr wichtig.
7.2.1 Totalreflexion
Tritt ein Lichtstrahl von einem optisch dichteren in ein optisch dünneres Medium,
so wird der Lichtstrahl vom Lot weggebrochen. Je schräger der Lichtstrahl auf
die Grenzfläche einfällt, desto stärker wird er vom Lot weggebrochen. Ist der
Winkel des gebrochenen Strahls 90◦ , so spricht man von Totalreflexion, da der
Lichtstrahl das optisch dichtere Medium nicht mehr verlässt. Es gilt im Fall der
Totalreflexion:
sin(αT ) =
n2
n1
(7.7)
Glas mit einer Brechzahl von ≈ 1,5 hat demnach einen Grenzwinkel von 42◦ . Ein
45◦ Prisma reflektiert daher besser als jeder Spiegel. Deswegen findet es in vielen
optischen Geräten zur Umlenkung von Lichtstrahlen Anwendung.
108
7 Optik
7.2.2 Prismen
Beim Durchgang durch ein dreiseitiges Prisma wird der Strahlstrahl um einen
Winkel δ abgelenkt. Der Ablenkwinkel ist am kleinsten, wenn das Licht so einfällt,
dass es im Inneren senkrecht zur Symmetrieachse verläuft. In diesem Fall spricht
man von einem symmetrischen Durchgang. Nach Abbldung 7.4 gilt:
γ = β1 + β2
(7.8)
Beim symmetrischen Durchgang gilt:
γ = 2β1
(7.9)
δ = (α1 − β1 ) + (α2 − β2 )
(7.10)
Zudem gilt allgemein:
Beim symmetrischen Durchgang gilt:
δ = 2(α1 − β1 )
(7.11)
γ + δ = α1 + α2
(7.12)
Daraus folgt allgemein:
bzw. für den symmetrischen Durchgang:
γ + δ = 2α1
(7.13)
Mit Hilfe des Brechungsgesetzes folgt für den symmetrischen Durchgang:
sin γ+δ
sin(α1 )
2
= n=
(7.14)
sin(β1 )
sin γ2
γ
sin γ+δ
=
n
·
sin
(7.15)
2
2
7.2.3 Dispersion
Die Brechzahl n ist i.a. für Licht verschiedener Farben verschieden. D.h. n hängt
von der Wellenlänge λ ab: n(λ). Dies bezeichnet man als Dispersion. Da der
Ablenkwinkel δ in einem Prisma von n und damit von λ abhängt, ist man in
der Lage, Licht mit Hilfe eines Prismas spektral zu zerlegen. Man bezeichnet
die Dispersion als normal, wenn langwelliges Licht schwächer gebrochen wird als
kurzwelliges.
7.3 Optische Instrumente
109
Abbildung 7.4: Schematische Darstellung der Brechung bei einem Prisma
7.3 Optische Instrumente
Bereits seit Galilei benutzen Menschen optische Instrumente, um die Natur, die
uns umgibt, besser zu verstehen.
Abbildung 7.5: Dispersion bei einem Prisma [Tipler2009]
110
7 Optik
Abbildung 7.6: Schematische Darstellung der Brechung bei einer dünnen Linse
[Tipler2009]
7.3.1 Die Linse
Für eine dünne Linse gilt die sog. Abbildungsgleichung
1 1
1
= +
f
g b
(7.16)
, wobei f die Brennweite und g, b die Gegenstands- bzw. Bildweite darstellen.
Treffen sich die Strahlen in einem Punkt, so wird das in diesem Punkt entstehende
Bild als reell bezeichnet. Treffen sich dagegen die verlängerten (nicht real existierenden) Strahlen, wird das Bild, welches in diesem Fall nur mit einer weiteren
Linse sichtbar gemacht werden kann, als virtuell bezeichnet. Ein Beispiel für ein
virtuelles Bild, ist das Bild einer Lupe. Die Vergrößerung V einer Lupe berechnet
sich aus dem Verhältnis der Bildbildgröße B und der Gegenstandsgröße G:
V =
B
G
(7.17)
Um das virtuelle einer Lupe oder einer Zerstreuungslinse sichtbar zu machen,
bedarf es einer zweiten Linse. Dies kann auch die Linse des Auges sein.
Abbildung 7.7: Bildkonstruktion bei einer Lupe [Tipler2009]
7.3 Optische Instrumente
111
Abbildung 7.8: Strahlengang beim kurzsichtigen Auge [Tipler2009]
7.3.2 Das Auge
Bei der Augenlinse handelt es sich um eine Sammellinse. Sie bündelt das durch
die Pupille eintretende Licht, so dass auf der Netzhaut ein scharfes Bild entsteht.
Die Linse ist elastisch und kann ihre Brechkraft ändern, um sowohl weit entfernte
als auch nahe Gegenstände zu fokussieren. Das geschieht mit Hilfe eines kleinen
Muskels, des Ziliarmuskels. Diese Schärfenanpassung nennt man Akkomodation.
Bei einem kurzsichtigen Menschen werden die Lichtstrahlen von der Linse des
Auges zu stark gebrochen, so dass ein scharfes Bild vor der Netzhaut entsteht.
Durch eine Zerstreuungslinse, die in der Mitte dicker ist als am Rand, kann der
Lichtstrahl vor dem Auge so gebrochen werden, dass der Strahl auf der Netzhaut
fokussiert wird und damit für den Betracher als scharf erscheint (siehe Abbildung
??). Bei einem weitsichtigen Menschen, bei dem die Lichtstrahlen ohne Brille
hinter der Netzhaut fokussiert werden, kann der Sehfehler gemäß Abbildung ??
mit einer Sammellinse korrigiert werden.
112
7 Optik
Abbildung 7.9: Strahlengang beim weitsichtigen Auge [Tipler2009]
Literaturverzeichnis
[Halliday2003]
D. Halliday, R. Resnick und J. Walker
Physik
Wiley-VCH, Weinheim (2003)
[Metag2000]
V. Metag
Skript zur Vorlesung der Experimentalphysik I, WS 2000/2001
Justus Liebig Universität Gießen
[Mueller2001]
T. Müller und F. Hartmann
Skript zur Vorlesung der Experimentalphysik I, WS 2001/2002
Universität Karlsruhe
[Stephan]
U. Stephan
Skript zur Vorlesung Mathematik/Numerik
TFH Berlin
[Tipler2009]
P. Tipler und G. Mosca
Physik, Für Wissenschaftler und Ingeniueure
Spektrum Akademischer Verlag, Heidelberg (2009)
[Stoecker2000]
H. Stöcker
Taschenbuch der Physik
Harri Deutsch Verlag, Frankfurt am Main (2000)