AD/DA-Umsetzung
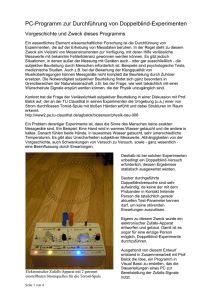
Werbung

Digitale Signal-Verarbeitung 1 Kapitel 2: AD/DA-Umsetzung Inhaltsverzeichnis 2.1. EINLEITUNG ................................................................................................................................................ 2 2.2. ABTASTUNG ................................................................................................................................................. 3 2.3. ALIASING ...................................................................................................................................................... 6 2.3.1 SPEZIFIKATION VON ANTI-ALIASING-FILTERN ........................................................................................... 7 2.3.2 ANTI-ALIASING-FILTER (OHNE NACHGESCHALTETEN DIGITALEN TIEFPASS).............................................. 8 2.3.3 ANTI-ALIASING-FILTER MIT NACHGESCHALTETEM DIGITALEN TIEFPASS ................................................... 8 2.3.4 OVERSAMPLING, DIGITALES TIEFPASS-FILTER, DOWNSAMPLING ............................................................... 9 2.4. REKONSTRUKTION ................................................................................................................................... 9 2.5. UNDERSAMPLING (FAKULTATIV) ...................................................................................................... 11 2.6. QUANTISIERUNG...................................................................................................................................... 12 2.7. APERTURE UND CLOCK SAMPLING JITTER (FAKULTATIV) ..................................................... 15 2.8. DIREKTE DIGITALE SYNTHESE .......................................................................................................... 17 2.9. MATHEMATISCHE GRUNDLAGEN (FAKULTATIV) ....................................................................... 21 2.9.1. DIRAC-IMPULS ......................................................................................................................................... 21 2.9.2. FOURIERREIHE ......................................................................................................................................... 22 2.9.3. FOURIERTRANSFORMATION ..................................................................................................................... 23 2.9.4. SPEZIELLE SIGNALFUNKTIONEN IM ZEIT- UND FREQUENZBEREICH ......................................................... 24 2.10. VISUALISIERUNG VON ABTASTUNG UND REKONSTRUKTION .............................................. 25 Literatur [1] W. Kester, Editor: „Analog-Digital Conversion“, Analog Devices, 2004. ISBN 0-916550-27-3, gratis Download: http://www.analog.com/library/analogDialogue/archives/39-06/data_conversion_handbook.html 68613979 / 14.05.16 Seite 1 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW 2.1. Einleitung In vielen DSV-Anwendungen ist eine Analog-Digital-(AD)-Wandlung und/oder eine DAWandlung erforderlich. In diesem Kapitel wird die konventionelle AD-DA-Umsetzung analysiert. Die oversampling-Methoden werden im Kapitel „Multiraten-Systeme“ behandelt. Die in diesem Kapitel verwendeten mathematischen Grundlagen sind im Anhang kurz zusammengestellt. Signale können mathematisch als Funktionen einer oder mehrerer unabhängiger Variablen dargestellt werden (z.B. ein Sprachsignal als Amplitude in Funktion der Zeit, ein Bildsignal als Helligkeit in Funktion zweier Ortsvariablen). Im Folgenden betrachten wir ausschliesslich Zeitsignale. Sie können in Bezug auf den Werte- und den Zeitbereich kontinuierlich oder diskret sein. Zeit- und wertkontinuierliche Signale bezeichnet man als analoge Signale. Digitale Signale dagegen sind zeit- und wertdiskret, d.h. das Signal nimmt nur diskrete Werte an äquidistanten Zeitpunkten an. Die Umwandlung eines zeitkontinuierlichen in ein zeitdiskretes Signal erfolgt durch die Abtastung und die Umwandlung eines wertkontinuierlichen in ein wertdiskretes Signal durch die Quantisierung, siehe Abbildung 2-1. Die Umwandlung eines digitalen Signals in ein anderes (z.B. binäres) digitales Signal schliesslich bezeichnet man als Codierung. x(t) analoges Signal (zeit- und wertkontinuierlich) t Abtastung zeitdiskretes, wertkontinuierliches Signal t Quantisierung digitales Signal (zeit- und wertdiskret) t Codierung binäres Signal (zeitdiskret, zweiwertig) t Abbildung 2-1: Klassifizierung von Signalen. 68613979 / 14.05.16 Seite 2 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW 2.2. Abtastung Im Folgenden bezeichnet Ts die Abtastperiode bzw. das Abtastintervall und fs=1/Ts die Abtastrate [Samples/s] bzw. die Abtastfrequenz [Hz]. Das tiefgestellte „s“ steht für „sampling“ bzw. „abtasten“. In Abbildung 2-2 (A) ist die „natural sampling“ Methode dargestellt. Ein Schalter wird zu den äquidistanten Zeitpunkten nTs, n= …, -1, 0, 1, …, für eine sehr kurze Zeit T0 <<Ts geschlossen. Das resultierende „Abtastsignal“ kann als Produkt des analogen Signals x(t) mit der Rechteck-Impulsfolge (Schalterfunktion) aufgefasst werden. (A) x(t) t = nTs T0 T0 t t -Ts T0 Ts t -Ts (B) x(t) Ts xs(t) t = nTs t -Ts t Ts t -Ts Ts Abbildung 2-2: Natural Sampling (A) und ideale Abtastung (B). Zu einer echt zeitdiskreten Darstellung des Signals gelangt man mathematisch durch Verkürzen der Einschaltzeit T0, bis im Grenzfall T0 → 0 nur noch die Funktionswerte x(nTs) zu den Zeitpunkten nTs im ideal abgetasteten Signal xs(t) enthalten sind. Damit die Leistung nicht Null wird, muss die Rechteck-Impulsfolge durch eine Dirac-Impulsfolge ersetzt werden. Symbolisch werden die Dirac-Impulse durch Pfeile dargestellt, siehe Abbildung 2-2 (B). Im Anhang befindet sich eine kurze Übersicht zum Dirac-Impuls δ(t). Das ideal abgetastete Signal xs(t) kann als Multiplikation des analogen Signals mit der DiracImpulsfolge dargestellt werden, d.h. xs (t ) x(t ) (t nTs ) . (2.1) n Mit der Sieb- bzw. Ausblendeigenschaft der Dirac-Funktion (siehe Anhang) folgt xs (t ) 68613979 / 14.05.16 x(nTs ) (t nTs ) . (2.2) n Seite 3 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW Einen besseren Einblick in die Eigenschaften des ideal abgetasteten Signals erhält man durch Fouriertransformation von xs(t) in den Frequenzbereich. Im Anhang befindet sich eine kurze Zusammenfassung wichtiger Resultate der Fourieranalyse. Die Dirac-Impulsfolge in Gleichung (2.1) ist eine periodische Funktion und kann deshalb als Fourierreihe dargestellt werden, d.h. 2 1 j n Ts t (t nTs ) Ts e n n (2.3) Durch Einsetzen der Fourierreihe aus der Gleichung (2.3) in die Gleichung (2.1) erhält man 2 jn t 1 xs (t ) x(t ) e Ts Ts n . (2.4) Mit Hilfe der Fouriertransformation bzw. mit den Eigenschaften „Superposition“ und „Frequenzverschiebung“, siehe Tabelle A2-1 im Anhang, erhält man das Spektrum des ideal abgetasteten Signals Xs( f ) 1 X ( f nf s ) Ts n (2.5) Interpretation Das Spektrum Xs(f) des ideal abgetasteten Signals xs(t) besteht bis auf eine Normierung aus dem Originalspektrum X(f) des analogen Signals x(t) sowie Kopien (Spiegelspektren bzw. Images) bei den ganzzahligen Vielfachen der Abtastfrequenz fs. Oder anders ausgedrückt: Das Fourier-Spektrum eines ideal abgetasteten bzw. diskreten Signals ist periodisch mit der Abtastfrequenz fs. Es ist vollständig bestimmt, wenn man es im Frequenzbereich [-fs/2, fs/2] bzw. [0, fs/2] kennt. Die einzelnen Frequenzbänder [(n-1)·fs/2, n·fs/2], n≥1, bezeichnet man auch als Nyquistbänder bzw. -zonen, als Referenz an die Pionierarbeiten von H. Nyquist in den 20er Jahren des letzten Jahrhunderts. Beispiel In Abbildung 2-3 (gestrichelt) ist das mit fs = 8 kSps abgetastete Signal x(t) = cos(2πf 0t) dargestellt, wobei f0 = 1 kHz. Das analoge Signal x(t) besitzt das Originalspektrum X(f) = 0.5·(δ(f+f0)+δ(f-f0)), siehe Tabelle A2-2 im Anhang. Das Spektrum Xs(f) des abgetasteten Signals ist in Abbildung 2-3 unten dargestellt. Es ist periodisch. 68613979 / 14.05.16 Seite 4 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW xs(t) = x(nTs) = x[n] Zeitbereich x(t) Frequenzbereich 1. Nyquistzone … 2. Nyquistzone … Ts·Xs(f) 2. Nyquistzone -fs fs Abbildung 2-3: Abgetastetes harmonisches Signal im Zeit- und im Frequenzbereich. In der Praxis wird die Abtastung mit einem Sample-and-Hold-Amplifier (SHA) gemacht, siehe Abbildung 2-4. Der SHA ist heute meistens im Analog-Digital-Converter (ADC) integriert. Der ideale SHA besteht aus einem Eingangsverstärker, einem Schalter, einer Haltekapazität und einem Impedanzwandler. Die Eingangsimpedanz des Impedanzwandlers muss so hochohmig sein, dass sich die Kapazität in der Halte- bzw. Konversionsphase (Schalter offen) maximal um 1 LSB (least significant bit) entladen kann. sampling clock analog input Timing ADC Encoder S track (S zu) hold (S offen) digital output track (S zu) Abbildung 2-4: SHA im ADC (siehe [1], Seite 2.26). 68613979 / 14.05.16 Seite 5 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW Ausgehend von Gleichung (2.2) kann noch ein anderer Ausdruck für das Fourier-Spektrum Xs(f) des ideal abgetasteten Signals xs(t) hergeleitet werden. Direkt mit der Fouriertransformation oder, alternativ, mit Hilfe des Fouriertransformationspaares δ(t) ○-● 1 und der Zeitverschiebungseigenschaft in Tabelle A2-1 im Anhang folgt Xs( f ) x(nT ) e jn2 s n f fs . (2.6) Gleichung (2.6) hat eine wichtige Bedeutung im Zusammenhang mit der Auswertung der zTransformation auf dem Einheitskreis, wie wir später sehen werden. 2.3. Aliasing In Abbildung 2-5 ist das Spektrum Xs(f) eines ideal abgetasteten Signals xs(t) für zwei verschiedene Abtastfrequenzen fs dargestellt. X(f) f fg Xs(f) Fall fs≥2fg Spiegelspektren bzw. images HTP(f) f -3fs -fs -2fs fs 2fs 3fs Xs(f) Fall fs<2fg Aliasing f -4fs -3fs -2fs -fs fs 2fs 3fs 4fs Abbildung 2-5: Spektrum eines ideal abgetasteten Signals ohne und mit Aliasing. Wenn das analoge Signal mit IfI ≤ fg frequenzbeschränkt ist und die Abtastfrequenz fs ≥ 2fg gewählt wird, überlappen sich die periodisch repetierten Spektralanteile im Spektrum des ideal abgetasteten Signals nicht. Das Originalspektrum X(f) kann mit einem idealen TiefpassFilter HTP(f) mit der Grenzfrequenz fs /2 fehlerfrei aus dem Spektrum Xs(f) des ideal abgetasteten Signals zurückgewonnen bzw. rekonstruiert werden. Die Abtastung mit fs = 2fg wird auch als kritische Abtastung und die Abtastrate fs = 2fg als Nyquist-Rate bezeichnet. Wenn das mit IfI ≤ fg frequenzbeschränkte, analoge Signal x(t) hingegen mit einer Abtastrate fs < 2fg abgetastet wird, überlappen sich die periodisch repetierten Spektralanteile im Spektrum des ideal abgetasteten Signals und das Originalspektrum des analogen Signals kann nicht mehr fehlerfrei bzw. nur noch mit nichtlinearen Verzerrungen rekonstruiert werden. Dieser Überlappungseffekt im Spektrum des abgetasteten Signals wird aliasing genannt. Effektiv werden dann höhere Frequenzkomponenten in tiefere reflektiert, oder anders ausgedrückt, höhere Frequenzkomponenten nehmen die Identität von tieferen Frequenzen an. 68613979 / 14.05.16 Seite 6 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW Beispiel Im Beispiel von Abbildung 2-3 oben ist neben dem 1 kHz Cosinussignal (gestrichelt) auch ein 7 kHz Cosinussignal (Strich-Punkt-Linie) dargestellt. Beide analogen Signale haben im Diskreten das gleiche Abtastsignal und das gleiche Spektrum Xs(f), wenn die Abtastrate fs =8 kSps beträgt. Das 7 kHz Cosinussignal sieht wegen dem Aliasing in der 1. Nyquistzone wie ein fs-7 kHz = 1 kHz Cosinussignal aus. Beispiel Im Film oder am Fernsehen drehen bei vorwärtsfahrenden Autos manchmal die Räder rückwärts. Das ist ein (störender) Aliasing-Effekt! Um das Aliasing genügend zu unterdrücken, muss das analoge Signal vor der Abtastung mit einem (analogen) Anti-Aliasing-Tiefpass-Filter auf das 1. Nyquistband frequenzbegrenzt werden, siehe Abbildung 2-6. fs fs fg < fs/2 fg < fs/2 AntiAliasing-Filter DAC „DSP“ ADC mit ZOH* Post-Filter * ZOHKompensation * Abbildung 2-6: Digitalisierungssystem (*: Komponenten des Rekonstruktionsfilters). 2.3.1 Spezifikation von Anti-Aliasing-Filtern Anti-Aliasing-Filter müssen sehr sorgfältig spezifiziert werden. In Abbildung 2-7 sind die Amplitudengänge IH(f)I zweier AAF dargestellt, welche Signalkomponenten bis zur Grenzfrequenz fg passieren lassen und darüber liegende Frequenzkomponenten dämpfen. IH(f)I IH(f)I ÜberDurchlass- gangsbereich bereich Sperrbereich DR Durchlassbereich DR Übergangsbereich Sperrbereich DR DR f fg f fg fs/2 fs-fg fs/2 fs-fg fs fs Abbildung 2-7: Spezifikation Anti-Aliasing-Filter (siehe [1], Seite 2.29). Die nach dem AAF verbleibenden Aliasing-Komponenten sind grau hinterlegt. Links: AAF dämpft alle Signal-Komponenten über fs/2 um den Faktor DR (dynamic range) Rechts: AAF dämpft erst die Signal-Komponenten über fs-fg um den Faktor DR. Es wird zusätzlich ein digitales Tiefpass-Filter nach dem ADC benötigt, um die Aliasing-Komponenten zwischen fg und fs/2 zu entfernen. Vorteil: Weniger strenge Anforderungen ans analoge AAF. Nachteil: Rechenleistung benötigt für das zusätzliche digitale Tiefpass-Filter. 68613979 / 14.05.16 Seite 7 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW Falls das analoge Eingangssignal „full-scale“-Komponenten über der Nyquistfrequenz fs/2 besitzt, entstehen beim Abtasten (ohne Anti-Aliasing-Filter) Alias-Komponenten. Diese Aliasing-Komponenten können nach der AD-Wandlung von den gewünschten SignalKomponenten nicht mehr unterschieden werden und können darum auch nicht mehr entfernt werden. D.h. die Aliasing-Komponenten müssen zwingend vor der AD-Wandlung unter den DR (dynamic range) gedämpft werden. Das Anti-Aliasing-Filter soll also einen Durchlassbereich bis zur Eckfrequenz fg und einen Sperrbereich ab der Eckfrequenz fs/2 resp. fs-fg mit einer Sperrdämpfung >DR aufweisen. Der erforderliche Dynamikbereich DR ist von Anwendung zu Anwendung verschieden und muss entsprechend den Anforderungen an die Signaltreue gewählt werden (z.B. >30 dB in der Telephonie oder >90 dB in der Audiotechnik). 2.3.2 Anti-Aliasing-Filter (ohne nachgeschalteten digitalen Tiefpass) In dieser klassischen Konfiguration muss das Anti-Aliasing-Filter sämtliche SignalKomponenten über der Nyquistfrequenz fs/2 soweit dämpfen, dass alle AliasingKomponenten unterhalb des DR (dynamic range) liegen. Diese Situation ist in der Abbildung 2-7 links dargestellt. Die Breite des Übergangsbereichs [fg,fs/2] des Anti-Aliasing-Filters hängt von der Grenzfrequenz fg (alle Nutzfrequenzen müssen unter fg liegen) und der Abtastfrequenz fs ab. Die Anforderungen an das Filter steigen zudem mit dem geforderten DR. Je schmaler der Übergangsbereich und je grösser der DR sind, desto steilflankiger und damit aufwändiger wird das Anti-Aliasing-Filter. Umgekehrt kann das Anti-Aliasing-Filter einfacher ausgelegt werden, wenn die Abtastfrequenz um einiges grösser als 2fg gewählt wird. Dafür müssen dann die Abtastwerte mit der höheren Rate verarbeitet werden (grösserer Rechenaufwand). Typischerweise wählt man die Abtastfrequenz fs im Bereich [2.5·fg, 4·fg]. Für ein ButterworthAnti-Aliasing-Filter N-ter Ordnung nimmt die Dämpfung A(f) im Übergangs- bzw. Sperrbereich f>fg mit N·6 dB pro Oktave (Frequenzverdoppelung) bzw. mit N·20 dB pro Dekade zu, d.h. A(f) ≈ 20·N·log10(f/fg) für f>fg. Wenn das analoge Eingangssignal oberhalb fs/2 um X dB kleinere Ampliduden als im interessierenden Frequenzbereich f<fg besitzt, kann die Anforderung an die Sperrdämpfung des Anti-Aliasing-Filters natürlich von DR auf DR-X gelockert werden. Beispiel Wenn Signalkomponenten bis fg = 3.1 kHz interessieren, die Abtastrate fs = 2.58·fg = 8 kSps beträgt und ein Dynamikbereich DR > 30 dB angestrebt wird, ist ein ButterworthAnti-Aliasing-Filter der Ordnung N ≥ 14 erforderlich, damit die Signalkomponenten bei f > fs/2 = 4 kHz mehr als 30 dB gedämpft werden. 2.3.3 Anti-Aliasing-Filter mit nachgeschaltetem digitalen Tiefpass Falls man noch etwas Reserve bei der Prozessor-Rechenzeit hat, kann man einen Teil des Anti-Aliasing-Aufwandes vom analogen zum digitalen verschieben und so Kosten sparen. Diese Situation ist in der Abbildung 2-7 links dargestellt. Der Übergangsbereich des analogen AAF wird verbreitert auf f g bis fs-fg. Die SignalKomponenten zwischen fs/2 und fs-fg erzeugen nun Aliasing im Frequenzbereich fg bis fs/2. Diese Aliasing-Komponenten werden durch ein digitales Tiefpass-Filter entfernt, womit das Signal im Nutzfrequenzbereich bis fg wieder sauber ist. 68613979 / 14.05.16 Seite 8 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW Beispiel Wenn Signalkomponenten bis fg = 3.1 kHz interessieren, die Abtastrate fs = 2.58·fg = 8 kSps beträgt und ein Dynamikbereich DR > 30 dB angestrebt wird, ist ein ButterworthAnti-Aliasing-Filter der Ordnung N ≥ 8 erforderlich, damit die Signalkomponenten bei f > fs-fg = 4.9 kHz mehr als 30 dB gedämpft werden. Weil hier die Aliasing-Komponenten zwischen fg und fs/2 durch das nachgeschaltetete digitale Tiefpass-Filter entfernt werden, sinkt die benötigte Filterordnung für das analoge AAF von 14 auf 8. 2.3.4 Oversampling, digitales Tiefpass-Filter, Downsampling Im Kapitel „Multiratensysteme“ werden wir sehen, dass mit der Oversampling-Methode der Anti-Aliasing-Filteraufwand noch stärker vom Analogen ins Digitale verschoben werden kann. Die Samplingfrequenz wird so weit über der höchsten Nutzfrequenz gewählt, das garantiert keine höherfrequenten Signalanteile vorhanden sind (Z.B. fs = 6.1 MHz für Audiosignale). Auf ein analoges Anti-Aliasing-Filter kann darum verzichtet werden. Ein mit fs getaktetes digitales Anti-Tiefpass-Filter entfernt alle Signalanteile zwischen fg und fs/2. (Z.B. fg = 20kHz für Audiosignale). Da jetzt über fg keine Signal-Komponenten mehr vorhanden sind, kann die Taktfrequenz auf 2fg reduziert werden (Z.B. auf 48kHz für Audiosignale). Die weitere Verarbeitung erfolgt nun effizient mit der niedrigen Taktfrequenz. Beispiel: In der professionellen Audiotechnik ist eine Abtastfrequenz von 192kHz, 96kHz oder 48 kHz und ein Dynamic Range von 140 dB (= 24 Bit) üblich, um Audiosignale bis 20 kHz verzerrungsfrei zu verarbeiten. CD hat eine Abtastfrequenz von 44.1 kHz und ein Dynamic Range von 90 dB (= 16 Bit). Die meisten Audiocodecs sind heute Sigma-Delta-Wandler, die wir im Kapitel „Multiratensysteme“ kennen lernen werden. 2.4. Rekonstruktion Solange das Spektrum des abgetasteten Signals kein Aliasing aufweist, kann das Originalspektrum X(f) des analogen Signals mit einem idealen Tiefpass-Filter HTP(f) mit der Grenzfrequenz fs /2 fehlerfrei aus Xs(f) rekonstruiert werden. Für X(f) gilt dann X(f) = Xs(f)·Ts·HTP(f) , (2.7) wobei das Rekonstruktionsfilter bzw. das Anti-Imaging-Filter ein rechteckiges Spektrum aufweist, d.h. HTP(f) = 1 für IfI ≤ fs/2 und HTP(f) = 0 für IfI > fs/2. Mit Hilfe der Fourier-Rücktransformation bzw. der Tabellen A2-1 und A2-2 im Anhang erhält man x(t ) xs (t ) sin( f s t ) , fs t (2.8) wobei die sin(x)/x-Funktion die Stossantwort des idealen Rekonstruktionsfilters und * die Faltung darstellen. Wenn man für xs(t) nun den Ausdruck rechts in der Gleichung (2.2) einsetzt und die Faltung ausführt, erhält man schliesslich das Abtasttheorem (C. Shannon) 68613979 / 14.05.16 Seite 9 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW x(t ) x(nTs ) sin(2 fs (t nTs )) 2 . (2.9) f 2 s (t nTs ) 2 n Interpretation Jedes mit fg<fs /2 frequenzbegrenzte Signal x(t) kann mit Hilfe von sin(x)/x-Interpolationsfunktionen fehlerfrei aus seinen Abtastwerten x(nTs) wiedergewonnen werden. Dieser Sachverhalt ist in Abbildung 2-8 dargestellt. Für t = nTs verschwinden jeweils alle Interpolationsfunktionen mit einer Ausnahme, welche dann den Wert 1 annimmt. x(t) = cos(2π(fs/16)t) 1 x(Ts) t Ts Abbildung 2-8: Rekonstruktion mit sin(x)/x-Interpolationsfunktionen. In der Praxis kann das ideale Rekonstruktions- bzw. Anti-Imaging-Filter mit seiner zeitlich unbeschränkten Stossantwort natürlich nur approximiert werden. Die meisten DAC halten am Ausgang einfach den diskreten Stützwert während dem ganzen Abtastintervall Ts fest, um Überschwinger während der D/A-Konversion zu vermeiden (deglitching). In Abbildung 2-6 ist das resultierende Treppenstufen-Signal dargestellt. Diese einfache Interpolation wird mit einem Halteglied 0. Ordnung (engl. zero order hold bzw. ZOH) erzeugt. Dieses Filter weist eine rechteckige Stossantwort auf, d.h. 1 0 t Ts h ZOH (t) sonst 0 (2.10) Mit Hilfe der Fouriertransformation bzw. der Tabellen A2-1 und A2-2 im Anhang und dem Normierungsfaktor 1/Ts erhält man für die Übertragungsfunktion bzw. das Spektrum des ZOH-Filters sin( f f ) j f f s e s f H f ZOH f (2.11) s Das ZOH-Filter ist nur ein bescheidenes Tiefpassfilter, siehe Abbildung 2-9. Um die Ecken des Treppenstufensignals zu glätten bzw. die hohen Frequenzanteile ganz auszufiltern, muss dem ZOH-Glied noch ein analoges Tiefpassfilter, das sogenannte Post-Filter, nachgeschaltet werden, siehe Abbildung 2-6. 68613979 / 14.05.16 Seite 10 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW -4 -14 Abbildung 2-9: Betragsspektrum des ZOH-Filters. Der Durchlassbereich des ZOH-Filters ist nicht konstant. Die Dämpfung bei IfI = fs/2 beträgt ca. 4 dB. Der abfallende Durchlassbereich kann aber oft ohne zusätzlichen Aufwand kompensiert werden, wenn das Kompensationsfilter mit einem bereits vorhandenen Digitalfilter kombiniert werden kann (Vorkompensation, siehe Abbildung 2-6). Natürlich ist auch eine analoge Nachkompensation möglich. Genau genommen besteht das Rekonstruktions- bzw. Anti-Imaging-Filter aus dem ZOHFilter, dem ZOH-Kompensationsfilter und dem nachgeschalteten Tiefpassfilter, siehe Abbildung 2-6. 2.5. Undersampling (fakultativ) Bis jetzt ist ausschliesslich das Abtasten eines Basisband-Signals behandelt worden, dessen Originalspektrum in der 1. Nyquistzone liegt, siehe Abbildung 2-10 (A). 1. Nyquistzone 2. Nyquistzone 3. Nyquistzone 4. Nyquistzone (A) Original Image Image Image f fs 2fs (B) Image Original Image Image f fs 2fs (C) Image Original Image fs Image f 2fs Abbildung 2-10: Unterabtastung bzw. Undersampling (siehe [1], Seite 2-32). 68613979 / 14.05.16 Seite 11 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW In Abbildung 2-10 (B) ist das Spektrum eines Bandpass-Signals dargestellt, das in der 3. Nyquistzone [fs, 1.5·fs] liegt. Das Abtasten eines Signals ausserhalb der 1. Nyquistzone bezeichnet man auch als undersampling (oder Unterabtastung). Durch die Unterabtastung entsteht in der 1. Nyquistzone eine frequenzverschobene Kopie (Image) des Originalspektrums. In Abbildung 2-10 (C) schliesslich ist das Spektrum eines Bandpass-Signals dargestellt, das in der 2. Nyquistzone [0.5·fs, fs] liegt. Durch die Unterabtastung entsteht in der 1. Nyquistzone eine frequenzverschobene, umgekehrte Kopie (Image) des Originalspektrums. Die Unterabtastung des Empfangssignals auf einer Zwischenfrequenz fc ist in der Mobilkommunikation weit verbreitet, weil man einerseits mit einer Abtastrate von f s << fc auskommt und gleichzeitig das Empfangssignal ins Basisband verschieben kann. Mit steigender Zwischenfrequenz fc steigen aber auch die Anforderungen an das dynamische Verhalten des ADC. Die Abtastfrequenz fs zur Unterabtastung eines Bandpass-Signals mit Mittenfrequenz fc und Bandbreite B kann mit den folgenden zwei Gleichungen bestimmt werden. Erstens muss das Abtasttheorem erfüllt sein, d.h. fs > 2B (2.12) Die nächste Gleichung garantiert, dass fc in der Mitte der Nyquistzone NZ (Integer) liegt: 4f c f s 2 NZ 1 (2.13) Auch bei der Unterabtastung ist normalerweise ein Anti-Aliasing-Filter am Eingang erforderlich. Es muss natürlich Bandpass-Charakter aufweisen. Beispiel Ein Bandpass-Signal im Frequenzbereich [69, 73] MHz mit Mittenfrequenz fc=71 MHz und Bandbreite B = 4 MHz soll unterabgetastet werden. Für die kleinst mögliche Abtastfrequenz erhalten wir aus den Gleichungen (2.12) und (2.13) fs = 8.1143 MSps. Das Bandpass-Signal liegt in der Mitte der 18. Nyquistzone [8.5·fs, 9·fs], d.h. im Frequenzbereich [68.9716, 73.0287] MHz. Die Anforderungen an das Anti-Aliasing-Bandpass-Filter können gelockert werden, wenn die Abtastrate fs erhöht wird, z.B. auf fs=10.519 MSps. Damit liegt das BandpassSignal in der 14. Nyquistzone im Frequenzbereich [68.3735, 73.6330] MHz. 2.6. Quantisierung Die Umsetzung einer Folge wertkontinuierlicher Abtastwerte in eine Folge von Zahlen beinhaltet wegen der beschränkten Wortlängen immer auch eine Rundungs- oder Abschneideoperation, die Quantisierung, siehe Abbildungen 2-1. Die Quantisierung verursacht einen Fehler, den Rundungs- oder Abschneidefehler, der nicht mehr rückgängig gemacht werden kann. Im Folgenden betrachten wir nur die lineare Quantisierung mit äquidistanten Quantisierungsstufen. Es wird aber auch mit unterschiedlich grossen Quantisierungsstufen gearbeitet, z.B. in der PCM-Telefonie. Bei der linearen Quantisierung wird der total mögliche Wertebereich des Eingangssignals, d.h. der Aussteuerbereich A bzw. fullscale-Bereich, in 2W gleich grosse Quantisierungsintervalle 68613979 / 14.05.16 Seite 12 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW A 2W (2.14) unterteilt, wobei W die Wortlänge eines Abtastwerts [in Bits] darstellt. Die resultierenden Intervalle werden numeriert bzw. codiert und jedem Code entspricht der Signalwert in der Mitte des betreffenden Intervalls (Rundung). Die Quantisierung ist eine nichtlineare Operation. In Abbildung 2-11 ist die treppenförmige Ein-/Ausgangskennlinie eines linearen Quantisierers mit 8 Intervallen (Wortlänge W=3 Bits) und Binär-Codierung im 2er-Komplement dargestellt. x(nTs) und xq(nTs) stellen die Abtastwerte am Ein- und am Ausgang des Quantisierers dar. In Abbildung 2-11 ist auch ein lineares Ersatzmodell für den Quantisierer dargestellt. Für den Quantisierungs- bzw. Rundungsfehler gilt (nTs ) x(nTs ) x q (nTs ) [ / 2, / 2[ . (2.15) Im Folgenden interessiert das Signal-to-Noise-Ratio [dB] SNR 10 log10 (Px / P ) , (2.16) d.h. das Verhältnis [dB] der Leistung Px des Signals am Quantisierungseingang zur Leistung Pε des Quantisierungsfehlers bzw. des Quantisierungsrauschens. x(nTs) xq(nTs) Quantisierer x(nTs) xq(nTs) ε(nTs) xq(nTs) 011 3Δ 010 2Δ out of range 001 Δ 000 -4Δ -3Δ out of range -2Δ 110 101 100 -Δ 111 x(nTs) Δ/2 Δ 2Δ 3Δ -Δ -2Δ -3Δ -4Δ Abbildung 2-11: Ein-Ausgangskennlinie eines Quantisierers und Ersatzmodell. 68613979 / 14.05.16 Seite 13 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW Herleitung der SNR-Formel Wenn die meisten kontinuierlichen Abtastwerte x(nTs) viel grösser als das Quantisierungsintervall Δ sind, treffen folgende Annahmen gut zu: Die einzelnen Quantisierungsfehler ε(nTs) sind unkorrelierte Zufallsgrössen und gleichverteilt im Intervall [- Δ/2, Δ/2]. Die Quantisierungsfehler ε(nTs) und die kontinuierlichen Abtastwerte x(nTs) sind unkorreliert. Der Mittelwert bzw. der Erwartungswert des Quantisierungsfehlers E[ε] = 0. Für die Leistung Pε des „DC-freien“ Quantisierungsfehlers erhält man /2 Pe 1 2 E[ ] d 12 / 2 2 2 . (2.17) Mit den Gleichungen (2.14) und (2.17) wird das Leistungsverhältnis Px 12 Px 2W 2 P A2 (2.18) SNR 6.02 W 10 log10 (12 Px / A 2 ) . (2.19) und das SNR in [dB] K Interpretation 1. Mit jedem Bit mehr Wortlänge wird das SNR um 6 dB erhöht. 2. Die Konstante K ist von der Signalleistung Px abhängig. Je kleiner der Signalpegel relativ zum Aussteuer- bzw. fullscale-Bereich ist, desto kleiner wird das SNR. 3. Selbst wenn der ADC voll ausgesteuert wird, ist die Konstante umgekehrt proportional zum Verhältnis von Spitzenwert A/2 zum Effektivwert (√Px), d.h. zum Crest-Faktor des Signals x(t). Je grösser der Crest-Faktor, desto kleiner ist K bzw. das resultierende SNR. SNR-Fromel für den Spezialfall vollausgesteuertes Sinus-Signal Bei einem sinusförmigen Signal x(nTs) mit Vollaussteuerung beträgt Px=(1/2)·(A/2)2 bzw. K = 1.76 dB und damit gilt: SNR [dB] = 6·W + 1.76 (2.20) Beispiel Ein sinusförmiges Signal x(t) = Xp·sin(2π·f0·t) werde mit einer Abtastfrequenz fs > 2f0 abgetastet und mit W = 8 Bit quantisiert. Für die Amplitude von x(t) gelte Xp ≤ Xmax = A/2, wobei A den peak-to-peak-Aussteuerungsbereich des AD-Wandlers darstellt. Für das Verhältnis von Signalleistung zu Quantisierungsrauschen SNR gilt wegen Px = (Xp)2/2 bzw. den Gleichungen (2.19) bzw. (2.20) SNR [dB] = 6·W + 1.76 + 20·log10(Xp/Xmax) . 68613979 / 14.05.16 Seite 14 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW In Abbildung 2-12 ist das resultierende SNR [dB] in Funktion der Aussteuerung Xp / Xmax [dB] dargestellt. Abbildung 2-12: SNR in Funktion der Aussteuerung für ein sinusförmiges Signal. Bei Vollaussteuerung Xp = Xmax, d.h. 20·log10(Xp/Xmax) = 0 dB, gilt wegen Gleichung (2.20) SNR = 49.76 dB. Wird die Amplitude Xp des sinusförmigen Signals x(t) um x dB reduziert, so reduziert sich auch das SNR um x dB. Das Übersteuern des Quantisierers oder ADCs muss unbedingt vermieden werden, weil die entstehenden Oberwellen störende Aliasingfrequenzen produzieren können. Das AntiAliasing-Filter hilft hier nicht, weil die Störungen nach dem Filter entstehen. Bei den zufälligen Signalen wie z.B. den Audiosignalen minimiert man die Übersteuerungswahrscheinlichkeit, indem man den ADC ganz selten voll aussteuert bzw. die Leistung Px verkleinert. In der Regel ist das erreichbare SNR dann um 8-10 dB kleiner als die „Daumenregel“ 6·W. Bei der CD (W=16 Bit) beträgt das erreichbare SNR ca. 90 dB. Bis jetzt haben wir angenommen, dass x(t) unverrauscht ist. Wenn das analoge Signal x(t) aber mehr oder weniger verrauscht ist, kann das digitale Signal x(nTs) kein höheres SNR aufweisen als x(t), auch wenn W sehr gross gewählt wird. Die Vergrösserung von W im ADC hat bei einem verrauschten Analogsignal also seine Grenze. Bei sehr geringer Aussteuerung trifft die obige Annahme eines im Intervall [ -Δ/2, Δ/2] gleichverteilten Quantisierungsfehlers nicht mehr zu. Im Extremfall wird ein sehr leiser Sinuston nur noch mit dem LSB abgebildet. Die resultierende Rechteckwelle besitzt Oberwellen, die „unharmonische“ Aliasingfrequenzen verursachen können. Eine Verbesserung kann durch eine höhere Auflösung, eine höhere Abtastrate oder durch Zumischen eines geringen Rauschens (dither) zwischen dem Anti-Aliasing-Filter und dem Abtaster erreicht werden. 2.7. Aperture und Clock Sampling Jitter (fakultativ) Im AD- und DA-Umsetzungsprozess gibt es neben der Quantisierung noch weitere Rauschquellen. Insbesondere bei den high speed ADC’s und DAC’s kann schon ein kleiner Jitter beim Öffnen des Schalters im SHA (siehe Abbildung 2-4) einen merklichen Einfluss auf das SNR haben. Dieser Jitter ensteht einerseits durch Nichtidealitäten im SHA selbst (Aperture Jitter), aber andererseits vor allem auch durch Sampling Clocks mit Jitter und/oder nichtideale ClockZuführungen (Sampling Clock Jitter). 68613979 / 14.05.16 Seite 15 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW In Abbildung 2-13 sind die Auswirkungen des Aperture und Clock Sampling Jitters beim Abtasten eines analogen Eingangssignals x(t) dargestellt. Je schneller sich das Signal x(t) innerhalb der Jitterzeit tj (rms-Wert bzw. Standardabweichung) ändert, desto grösser ist der statistische Fehler ∆xrms bzw. das resultierende Rauschen. ∆xrms x(t) Schalter offen (hold) t tj Abbildung 2-13: Auswirkung von Aperture und Clock Sampling Jitter, siehe [1], S. 2.70. In [1], Seite 2.71, wird gezeigt, dass beim Abtasten eines sinusförmigen Eingangssignals x(t) mit Frequenz f und fullscale-Amplitude das SNR wegen dem Aperture und Clock Sampling Jitter wie folgt ausgedrückt werden kann: SNR = -20·log10(2πf·tj) [dB]. (2.21) Das SNR ist umso kleiner, je grösser der rms-Jitter tj und/oder je grösser die Frequenz des Eingangssignals ist, siehe Abbildung 2-14. Abbildung 2-14: SNR versus Frequenz f für verschiedene rms-Jitter tj. Beispiel Wenn ein sinusförmiges Eingangssignal x(t) mit fullscale-Amplitude und Frequenz f=10 MHz abgetastet und ein „schlechtes“ Clocksignal mit einem rms-Jitter tj=100 ps Jitter verwendet wird, dann wird das SNR nicht besser als ca. 42 dB, auch wenn das Quantisierungsrauschen noch so klein ist. Es macht deshalb keinen Sinn, einen 16-Bit-ADC mit einem DDS-Baustein zu clocken, der einen rms-Jitter von tj=80 ps aufweist. DDS steht für Direct Digital Synthesis. 68613979 / 14.05.16 Seite 16 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW 2.8. Direkte Digitale Synthese Das folgende Kapitel stützt sich auf [1], Kapitel 8.7. Unter Frequenzsynthese versteht man die Generierung von Sinus-Signalen mit unterschiedlichen Frequenzen ausgehend von einer Referenzfrequenz. Die Frequenzsynthese spielt u.a. eine wichtige Rolle in der Nachrichten- und der Messtechnik. Oft braucht man z.B. ein Sinus-Signal mit einer festen oder wählbaren Frequenz f0, um ein Nachrichtensignal im Spektrum um f0 nach oben oder unten zu verschieben (Mischung). Für die Frequenzsynthese können analoge Phase-Locked-Loops (PLLs) eingesetzt werden. Sinus-Signale werden heute aber vermehrt auch digital generiert. Das entsprechende Prinzip nennt man Direkte Digitale Synthese (DDS), siehe Abbildung 2-15. Lookup-Tabelle mit N Werten einer Sinus-Periode t 0 Ts=1/fs DAC TP (ZOH) Phase[n] = (Phase[n-1] + M) mod N fs (Phase entspricht Adresse) f0 = M·fs/N t 0 Ts=1/fs T0 Fall M=2 t 0 Ts=1/fs Abbildung 2-15: Grundprinzip DDS. In einer Lookup-Tabelle sind N Werte einer Sinus-Periode abgespeichert. Mit einem ModuloAdress-Zähler werden die Abtastwerte nacheinander oder in M-Schritten selektiert und mit einem Digital-Analog-Converter (DAC) mit der Abtastfrequenz fs umgesetzt. Das Ausgangssignal des DAC weist wegen dem Zero-Order-Hold Treppenstufen auf, die mit einem Tiefpass-Filter (TP) geglättet werden. Die Adresse in der Lookup-Tabelle entspricht eigentlich einer Sinus-Phase. Die PhasenAktualisierung kann wie folgt beschrieben werden, Phase[n] = (Phase[n-1] + M) modulo N, (2.22) wobei Phase[n] die Phase (= Adresse = Tabellenindex) zum Zeitpunkt n, M das so genannte Tuning-Wort (= Inkrement bis zur nächsten Phase => Adresse = Adresse + M) und N die Anzahl Phasen (= Anzahl Sinus-Abtastwerte = Grösse der Tabelle) bezeichnen. Die Frequenz kann durch Wahl des Tuning-Worts M eingestellt werden. Man spricht in diesem Zusammenhang auch von einem NCO (Numerically Controlled Oscillator). 68613979 / 14.05.16 Seite 17 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW Im Fall M=1 weist das DDS-Signal die längste Periode T0=N·Ts bzw. die kleinste Frequenz f0=fs/N auf. Im Fall M=2 weist das DDS-Signal die Periode T0=(N/2)·Ts bzw. die Frequenz f0=2·fs/N auf. Allgemein gilt die sogenannte Tuning-Gleichung: f0 = M·fs/N = M·Δf (2.23) Δf = fs/N (2.24) wobei die Frequenzauflösung darstellt. Ein DDS-System kann SW-mässig mit einem Prozessor mit Speicher und einem DAC realisiert werden. Um den Prozessor zu entlasten, ist es aber oft vorteilhaft, einen der zahlreich verfügbaren CMOS-DDS-Bausteine einzusetzen. In Abbildung 2-16 ist ein Blockdiagramm eines DDS-Bausteins (NCOs) dargestellt. Die Adresse für die Sinus-Lookup-Tabelle wird im Phasen-Akkumulator gemäss Gleichung (2.22) generiert. seriell oder parallel Vref Tuning-Wort M w truncation w = 24-48 Bits w Phasenregister w 12-19 Bit Sinus LookupTabelle 10-14 Bit DAC TP Phasen-Akkumulator DDS-Baustein (NCO) Referenz-Clock fs (fs ≤ 25…1000 MHz, je nach Baustein) Abbildung 2-16: Blockdiagramm DDS-Baustein (NCO). In der Praxis ist das Tuning-Wort w = 24-48 Bit breit. Damit hätte die Sinus-Lookup-Tabelle eigentlich N=2w Einträge. So fein können die Sinus-Abtastwerte aber nicht umgesetzt werden, weil der DAC im DDS eine Wortbreite von 10-14 Bit hat. Je nach Genauigkeitsanforderung schneidet man deshalb die w-Bit Phasen-Adresse so ab, dass sie 2 bis 4 Bit mehr Auflösung als der DAC aufweist. Dadurch wird die Lookup-Tabelle deutlich kleiner. Weiter wird normalerweise nur ein Quadrant der Sinus-Periode abspeichert. In Abbildung 2-17 ist das Betragsspektrum am Ausgang eines DDS-Systems für den Fall f0=30 MHz und fs=100 MHz dargestellt. Das Spektrum ist periodisch mit der Abtastfrequenz fs. Neben der f0-Komponente sind auch die Kopien bei den Vielfachen der Abtastfrequenz, nämlich bei f=k·fs±f0, zu sehen. Das Spektrum ist mit dem sin(x)/x-förmigen Frequenzgang des ZOH gewichtet. Die Komponente bei f=fs-f0 und die anderen Kopien müssen mit einem TP weggefiltert werden. Die Anforderungen an die Steilheit des TP-Filters steigen, je näher f0 bei fs/2 gewählt wird. 68613979 / 14.05.16 Seite 18 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW Die Ausgangsfrequenz f0 eines DDS-Systems ist wegen dem Abtasttheorem theoretisch auf die halbe Abtastfrequenz beschränkt. In der Praxis gilt wegen der TP-Filterung typisch f0 ≤ 0.4·fs. (2.25) Auf dem Markt sind DDS-Bausteine mit maximalen Abtastfrequenzen von fs=25 MHz bis fs=1000 MHz erhältlich. analoges TP-Filter 0 dB HZOH (f) sin( π f/f s ) π f/f s -4 dB Kopien SFDR 2 2 „Rauschen“ f [MHz] f0=30 fs/2=50 70 fs=100 130 Abbildung 2-17: Betragsspektrum am Ausgang eines DDS-Systems. Die Reinheit des Spektrums wird normalerweise mit dem Spurious Free Dynamic Range (SFDR) angegeben. Primär hängt der SFDR von der Wortbreite des DAC bzw. dem Quantisierungsrauschen ab. Es gibt aber auch sekundäre Effekte, die die spektrale Reinheit ziemlich einschränken. So ist z.B. die DA-Umsetzung nicht ganz linear. Dadurch entstehen Oberwellen mit Kopien in der 1. Nyquistzone. In Abbildung 2-17 sind die 2. Oberwelle bei f = 2f0 = 60 MHz und die Kopie bei f = fs-2f0 = 40 MHz eingezeichnet. DDS-Systeme weisen die folgenden Eigenschaften auf: schnelles und flexibles Frequenz-Tuning Die Frequenz kann sehr einfach durch (serielles oder paralleles) Laden und Freischalten eines neuen Tuning-Worts M geändert werden. sehr hohe Frequenzauflösung Beispiel: Der DDS-Baustein AD9834 der Firma Analog Devices weist eine maximale Abtastfrequenz von 50 MHz und ein 28-Bit breites Tuning-Wort auf. Die Frequenzauflösung beträgt gemäss Gleichung (2.24) Δf = 0.186 Hz. spektrale Reinheit für viele Anwendungen genügend DDS-Bausteine haben (schmalband) SFDR-Werte im Bereich 60-90 dB. 68613979 / 14.05.16 Seite 19 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW kontinuierliche Phase Bei der Änderung der DDS-Ausgangsfrequenz entsteht grundsätzlich kein Phasensprung. Natürlich besteht auch die Option, nach jeder Frequenzänderung mit einer definierten Phase (z.B. 00) neu zu starten. Frequenz- und Phasen-Umtastung (FSK/PSK) Einige DDS-Bausteine verfügen über 2 Tuning-Wort-Register M0 und M1, wobei das eine oder andere zugeschaltet wird, je nachdem, ob ein binäres Datensignal 0 oder 1 ist. Damit kann das DDS-Ausgangssignal in der Frequenz moduliert werden (Frequenzumtastung, Datenbit=0 => f0=M0·Δf, Datenbit=1 => f1=M1·Δf). Ähnlich einfach ist auch die Phasenumtastung realisierbar, siehe [1]. Grundsätzlich kann auch die Amplitude moduliert werden, indem die Referenzspannung Vref verändert wird. Sweeping und schnelles Frequenz-Hüpfen (FH) Es gibt DDS-Bausteine, bei denen das Tuning-Wort M in einer vorgegebenen Zeit stufenweise im Bereich Mu ≤ M ≤ Mo inkrementiert werden kann (Sweep). Ebenso gibt es DDS-Bausteine, die schnelles Frequenzhüpfen zwischen vorgegebenen Frequenzen unterstützen, siehe [1]. HF-Frequenz-Synthese Es gibt DDS-Bausteine mit integriertem Phasendetektor zwecks Kombination „DDSPLL“ zur Synthese von Mikrowellen-Frequenzen. relativ hoher Stromverbrauch Die Leistungsaufnahme und damit der Stromverbrauch steigen mit der Abtastfrequenz fs stark an. Für fs > 200 MHz beträgt die Leistungsaufnahme schnell einmal mehr als 1 W. Es gibt aber einige wenige low-power DDS-Bausteine. relativ hoher rms-Jitterwert DDS-Signale sollten wegen den relativ hohen rms-Jitterwerten nicht als Clock für schnelle ADCs verwendet werden. 68613979 / 14.05.16 Seite 20 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW 2.9. Mathematische Grundlagen (fakultativ) In diesem Anhang werden einige mathematische Resultate zusammengestellt, die in diesem Kapitel gebraucht werden. 2.9.1. Dirac-Impuls Der Dirac-Impuls δ(t) kann als genügend kurzer Rechteck-Impuls hoher Amplitude gedeutet werden. Er wird üblicherweise mit einem Pfeil und allenfalls einem „Gewicht“ dargestellt. Mathematisch gesehen ist der Dirac-Impuls δ(t) eine verallgemeinerte Funktion, eine sogenannte Distribution. Er kann durch das folgende Integral definiert werden: x(t ) (t t0 ) dt x(t0 ) Der Dirac-Impuls verfügt über eine eigentliche Sieb- bzw. Ausblendeigenschaft. Im Integral oben wird aus der Funktion x(t) genau der Wert an der Impulsstelle t=t0 „herausgesiebt“. Es kann auch gezeigt werden, dass die Siebeigenschaft für ein Produkt von einem Dirac-Impuls δ(t) mit einem Signal x(t) gilt, d.h. x(t ) (t t0 ) x(t0 ) (t t0 ) . Beispiel x(t) h(t) y(t) = x(t) * h(t) δ(t) h(t) h(t) Abbildung 2-18: Stossantwort eines linearen, zeitkontinuierlichen Systems. Das Signal y(t) am Ausgang eines linearen, zeitkontinuierlichen Systems ist durch die Faltung des Eingangssignals x(t) mit der Stossantwort h(t) des Systems gegeben, d.h. y(t ) x(t ) h(t ) x( ) h(t ) d . Wenn man einen Dirac-Impuls δ(t) als Eingangssignal verwendet, antwortet das System mit der Stossantwort h(t), d.h. y(t ) (t ) h(t ) h(t ) , siehe Abbildung 2-18. 68613979 / 14.05.16 Seite 21 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW 2.9.2. Fourierreihe Signale x(t) mit Periode T, d.h. x(t) = x(t+nT) für alle ganzen Zahlen n, können als komplexe Fourierreihe dargestellt werden: cn e x(t ) cn 1 T jn 2 t T n T /2 T / 2 x(t ) e jn 2 t T dt Periodische Signale x(t) haben ein diskretes Linienspektrum cn bei den ganzzahligen Vielfachen der Grundfrequenz 1/T. Alternativ können periodische Signale x(t) auch als reelle Fourierreihe dargestellt werden: 2 x(t ) A A cos(n t ) 0 n n T n 1 Der Zusammenhang zwischen den reellen und den komplexen Fourierkoeffizienten lautet: A c , A 2 c für n 1, 2,... arg(c ) 0 0 n n n n Für die normierte Leistung (an 1Ω) gilt: 1 2 x (t ) dt T T 1 2 A2 A 0 2 n n 1 2 . c n n Beispiel cn x(t) 2/π 1 f t T 2 T -5 T -3 T -1 T 1 T 3 T 5 T Abbildung 2-19: Fourierreihendarstellung und Fourierkoeffizienten eines periodischen Rechtecksignals. Das in Abbildung 2-19 dargestellte periodische Rechtecksignal besitzt die reelle Fourierreihendarstellung xt 4 2 1 2 1 2 sin t sin 3 t sin 5 t ... T 3 T 5 T und ein diskretes Linienspektrum bei den ungeraden Vielfachen der Grundfrequenz 1/T, das betragsmässig mit 1/x abnimmt. Die Phasenwerte betragen φn = -n·π/2 für n=±1, ±3, … 68613979 / 14.05.16 Seite 22 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW In Abbildung A2-2 ist die Approximation des periodischen Rechtecksignals mit den ersten beiden Termen der Fourierreihe dargestellt. Der Zusammenhang zwischen Zeit- und Frequenzbereich wird oft mit dem Symbol ○-● hervorgehoben. 2.9.3. Fouriertransformation Für die allermeisten zeitkontinuierlichen Signale x(t) mit endlicher Energie exisitiert die Fouriertransformation und die inverse Fouriertransformation: X( f ) x(t ) x(t ) e j2 f t dt X ( f ) e j2 f t df Das Fourierspektrum wird manchmal auch in Funktion der Kreisfrequenz ω=2πf statt der Frequenz f angegeben. Zeitkontinuierlichen Signale x(t) mit endlicher Energie haben ein kontinuierliches AmplitudenDichtespektrum [Amplitude/Hz]. In Tabelle 2-1 sind einige nützliche Eigenschaften der Fouriertransformation zusammengefasst: Eigenschaft Faltung Multiplikation Symmetrie Superposition Ähnlichkeit Zeitbereich Zeitverschiebung x(t t0 ) Frequenzverschiebung x(t ) e j 2 f0 t X ( f ) e j 2 f t0 X ( f f0 ) Differentiation d n / dt n x(t ) ( j 2 f )n X ( f ) x(t ) h(t ) x(t ) h(t ) X (t ) a x(t ) b y (t ) x(a t ), a 0 Frequenzbereich X ( f ) H ( f ) X ( f ) H ( f ) x(-f) a X ( f ) b Y ( f ) (1/ a ) X ( f / a) Tabelle 2-1: Eigenschaften der Fouriertransformation. Beispiel Das Signal y(t) am Ausgang eines linearen, zeitkontinuierlichen Systems ist durch die Faltung des Eingangssignals x(t) mit der Stossantwort h(t) des Systems gegeben, d.h. y(t) = x(t) * h(t), siehe Abbildung 2-18. Mit Hilfe der Fouriertransformation bzw. der Faltungseigenschaft in Tabelle 2-1 gilt für das Fourier-Spektrum des Ausgangssignals Y(f) die einfache Beziehung Y( f ) X ( f ) H( f ) , wobei X(f) das Fourierspektrum des Eingangssignals x(t) und H(f) das Fourierspektrum der Stossantwort h(t) darstellen. H(f) wird üblicherweise als Übertragungsfunktion bezeichnet, die oft mit der Methode der symbolischen Wechselspannungsrechnung bestimmt wird. 68613979 / 14.05.16 Seite 23 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW 2.9.4. Spezielle Signalfunktionen im Zeit- und Frequenzbereich In Tabelle 2-2 sind einige nützliche Signalfunktionen im Zeit- und im Frequenzbereich dargestellt. Rechteckimpuls bzw. idealer TP A -τ/2 Afg τ A·r□(t/τ) ○-● A·τ·sin(π·f·τ) / (π·f·τ) t τ/2 f A A·fg·sin(π·t·fg) / (π·t·fg) ○-● A·r t □(f/fg) 1/τ f -fg/2 fg/2 1/fg Dirac-Impuls(folge) (1) δ(t) ○-● 1 1 t f 1 (1) 1 ○-● δ(f) „Gleichstrom“ t n f (t nT ) (1/ T ) ( f n / T ) n (1/T) (1) t T f 1/T Cosinus cos(2πf0t) ○-● 1/2 [δ(f+f0) + δ(f-f0)] 1 (1/2) t -f0 1/f0 f0 f Tabelle 2-2: Spezielle Signalfunktionen im Zeit- und im Frequenzbereich. 68613979 / 14.05.16 Seite 24 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW 2.10. Visualisierung von Abtastung und Rekonstruktion In diesem Kapitel wird der wichtige Fall eines sinusförmigen Signals, die Abtastung mit einem idealen AD-Wandler und die Rekonstruktion mit einem DA-Wandler mit Zero-OrderHold-Ausgang (also ohne Rekonstruktionsfilter) visualisiert. Der Einfluss der Abtastfrequenz ist ebenfalls ersichtlich. analoges Signal im Zeitbereich und im Frequenzbereich 1 1 0 0.5 -1 -1 -0.5 0 0.5 1 0 -10 ideal abgetastetes Signal im Zeitbereich 1 1 0 0.5 -1 -1 -0.5 0 0.5 1 mit Zero-Order-Hold rekonstruiertes Signal im Zeitbereich 1 0 -1 -1 -5 0 5 10 und im Frequenzbereich mit fs = 5 0 -10 -5 0 5 10 und im Frequenzbereich mit fs = 5 1 0.5 -0.5 0 0.5 1 0 -10 -5 0 5 10 Abbildung 2-20: Abtastung und Rekonstruktion bei Sampling-Frequenz = 5*Nutzfrequenz analoges Signal im Zeitbereich und im Frequenzbereich 1 1 0 0.5 -1 -1 -0.5 0 0.5 1 0 -40 ideal abgetastetes Signal im Zeitbereich 1 1 0 0.5 -1 -1 -0.5 0 0.5 1 mit Zero-Order-Hold rekonstruiertes Signal im Zeitbereich 1 0 -1 -1 -20 0 20 40 und im Frequenzbereich mit fs = 20 0 -40 -20 0 20 40 und im Frequenzbereich mit fs = 20 1 0.5 -0.5 0 0.5 1 0 -40 -20 0 20 40 Abbildung 2-21: Abtastung und Rekonstruktion bei Sampling-Frequenz = 20*Nutzfrequenz 68613979 / 14.05.16 Seite 25 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW Beim analogen Signal sind die beiden Frequenzlinien im Spektrum gut erkennbar. Die Abtastfrequenz wurde in der Abbildung 2-21 fünfmal so hoch wie das Nutzsignal gewählt. Man erkennt die Repetition des ursprünglichen Spektrums bei ganzzahligen Vielfachen der Abtastfrequenz. Bei der Rekonstruktion mit Zero-Order-Hold sieht man, dass das Spektrum mit dem Sinus(x)/x -Verlauf multipliziert wird. Zum Beispiel erscheint die Linie Abtastfrequenz Nutzfrequenz mit einem Fünftel der Amplitude am Ausgang. Mit höherer Sampling-Frequenz (Abbildung 2-22) bleibt sich im Grundsatz alles gleich. Als nachgeschaltetes analoges Rekonstruktionsfilter reicht wegen des grösseren Abstandes zwischen Nutzfrequenz und Samplingfrequenz meistens ein einfacher RC-Tiefpass. Der Rechenaufwand ist hingegen grösser, da mehr Samples verarbeitet werden müssen. analoges Signal im Zeitbereich und im Frequenzbereich 1 1 0 0.5 -1 -1 -0.5 0 0.5 1 0 -6 ideal abgetastetes Signal im Zeitbereich 1 0 0.5 -0.5 0 0.5 1 mit Zero-Order-Hold rekonstruiertes Signal im Zeitbereich 1 0 -1 -1 -2 0 2 4 6 und im Frequenzbereich mit fs = 3 1 -1 -1 -4 0 -6 -4 -2 0 2 4 6 und im Frequenzbereich mit fs = 3 1 0.5 -0.5 0 0.5 1 0 -6 -4 -2 0 2 4 6 Abbildung 2-21: Abtastung und Rekonstruktion bei Sampling-Frequenz = 3*Nutzfrequenz Bei tieferer Sampling-Frequenz ist ein steileres Anti-Aliasing- und Rekonstruktions-Filter notwendig. Weil weniger Samples verrechnet werden müssen, ist dafür der Aufwand im Digitalen kleiner. Diese Abbildungen wurden mit dem Matlab-Skript dsv1kap2_adda.m erstellt. 68613979 / 14.05.16 Seite 26 / 26 Rumc&Hhrt@ZSN@SoE@ZHAW