Uebungsblatt_6_Musterloesung
Werbung

XVIII. Das mathematische und das physikalische Pendel
Eine lineare Differentialgleichung 2. Ordnung hat die allgemeine Form:
dy(x)
d 2 y(x)
(1)
+ P(x) ⋅
+ Q(x) ⋅ y(x) = R(x) .
2
dx
dx
Die allgemeine Lösung dieser inhomogenen Gleichung lautet y(x) = yh(x) + yp(x), dabei ist
yh(x) die allgemeine Lösung der zu (1) gehörenden homogenen Gleichung:
dy(x)
d 2 y(x)
(2)
+ P(x) ⋅
+ Q(x) ⋅ y(x) = 0 ,
2
dx
dx
yp(x) ist irgendeine partikuläre Lösung von (1).
Handelt es sich bei P(x) und Q(x) um Konstanten, etwa A und B, ergibt sich aus (2) folgende
homogene Gleichung:
dy(x)
d 2 y(x)
(3)
+ A⋅
+ B ⋅ y(x) = 0 .
dx
dx 2
Diese lineare DGL löst man mit Hilfe des Ansatzes: y(x) = exp(α⋅x). Damit ergibt sich aus
(3) das charakteristische Polynom α2 + A⋅α + Β = 0. Diese Gleichung liefert für α zwei
Wurzeln (die beiden Lösungen dieser quadratischen Gleichung) α1 und α2 und es sind
folgende Fälle zu unterscheiden:
(i) Die Wurzeln sind beide reell und verschieden (α1 ≠ α2). Eine partikuläre Lösung ist y(x) =
exp(α1⋅x) + exp(α2⋅x), somit lautet die allgemeine Lösung y(x) = c1⋅exp(α1⋅x) + c2⋅exp(α2⋅x).
(ii) Die Wurzeln sind beide reell und gleich (α1 = α2 = α). Eine partikuläre Lösung ist y(x) =
exp(α⋅x) + x⋅exp(α⋅x), somit lautet die allgemeine Lösung y(x) = c1⋅exp(α⋅x) + c2⋅x⋅exp(α⋅x).
(iii) Die Wurzeln sind komplex. Sind A und B reelle Konstanten, erhält man konjugiert
komplexe Wurzeln, nämlich α1 = a + i⋅b und α2 = a - i⋅b. Eine partikuläre Lösung ist y(x) =
exp((a + i⋅b) ⋅x) + exp((a - i⋅b) ⋅x), mit der Beziehung exp(i⋅a⋅x) = cos(a⋅x) + i⋅sin(a⋅x)
(Eulersche Beziehung) ergibt sich als allgemeine Lösung y(x) = exp(a⋅x)
⋅(c1⋅cos(b⋅x)+c2⋅sin(b⋅x)).
Sucht man nun die allgemeine Lösung der folgenden inhomogenen DGL:
dy(x)
d 2 y(x)
(4)
+A⋅
+ B ⋅ y(x) = R(x) ,
2
dx
dx
so muß man zunächst eine partikuläre Lösung der inhomogenen Gleichung bestimmen und
dann zu ihr die allgemeine Lösung der homogenen Gleichung (3) addieren. Zur Bestimmung
einer partikulären Lösung dienen zwei wichtige Methoden:
1. „Methode der unbestimmten Koeffizienten“
Diese Methode kann man nur zur Lösung solcher Funktionen R(x) heranziehen, die durch
Polynome, Exponentialfunktionen, trigonometrische Funktionen oder Summen dieser
Funktionen gegeben sind. Man benutzt folgende Ansätze:
Funktionstyp
R(x) = a0 + a1⋅x + a2⋅x2 + ... + an⋅xn
R(x) = a⋅exp(m⋅x)
R(x) = a⋅cos(m⋅x) + b⋅sin(m⋅x)
R(x) = a⋅cosh(m⋅x) + b⋅sinh(m⋅x)
Ansatz für yp(x)
yp(x) = A0 + A1⋅x + A2⋅x2 + ... + An⋅xn (fehlt y(x)
in (4), dann bis xn+1)
yp(x) = A⋅exp(m⋅x)
yp(x) = A⋅cos(m⋅x) + B⋅sin(m⋅x)
yp(x) = A⋅cosh(m⋅x) + B⋅sinh(m⋅x)
1
R(x) = exp(p⋅x) ⋅( a0 + ... + an⋅xn)⋅(
a⋅cos(m⋅x) + b⋅sin(m⋅x))
R(x) ist Summe obiger Funktionen
yp(x) = exp(p⋅x) ⋅[(A0 + ... + An⋅xn)⋅cos(m⋅x) +
(B0 + ... + Bn⋅xn)⋅sin(m⋅x)]
yp(x) entsprechende Summe
2. „Methode der Variation der Parameter“
Zunächst wird hier eine homogene Lösung mit den Konstanten c1 und c2 bestimmt.
Anschließend werden diese Konstanten durch die Funktionen f1(x) und f2(x) erstetzt, die so
gewählt werden, daß sie die gegebene Gleichung erfüllen.
Der freie gedämpfte harmonische (mathematische) Oszillator wird durch folgende DGL
(Bewegungsgleichung) beschrieben:
c
D
und ω 2 :=
m ⋅ &x& = −c ⋅ x& − D ⋅ x , mit γ :=
ergibt sich &x& = −2 ⋅ γ ⋅ x& − ω 2 ⋅ x .
0
0
2⋅m
m
Dabei ist c ⋅ x& der Dämpfungsterm und D ⋅ x der Rückstellterm. Der freie gedämpfte
harmonische (physikalische) Oszillator wird durch folgende DGL beschrieben (hier wird
die Masse m durch das Trägheitsmoment Θ ersetzt):
c
D
und ω 2 :=
Θ ⋅ &x& = −c ⋅ x& − D ⋅ x , mit γ :=
ergibt sich &x& = −2 ⋅ γ ⋅ x& − ω 2 ⋅ x .
0 Θ
0
2⋅Θ
Zur Bearbeitung der folgenden Aufgaben empfiehlt sich u.a. ein Studium der folgenden
Literatur:
„Klassische Mechanik“ von F.Kuypers, Seiten 140-143
VCH Verlagsgesellschaft mbH, Weinheim, 3. Auflage
„Physik“ von C.Gerthsen, H.O.Kneser und H.Vogel, Seiten 89-91 und 649-651
Springer-Verlag, Berlin – Heidelberg, 16. Auflage
________________________________________________________________________
Aufgaben
a) Lösen Sie die Bewegungsgleichung des freien, gedämpften harmonischen
(mathematischen) Oszillators für den Fall (i) geringer Dämpfung (γ2 < ω02), (ii) starker
Dämpfung (γ2 > ω02) und (iii) für den sogenannten „aperiodischen Grenzfall“ (γ2 = ω02).
φ
s
R
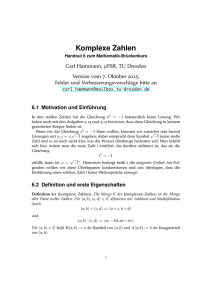
b) (i) Wie lautet die Bewegungsgleichung für die Schwingung einer dünnen Kreisscheibe
vom Radius R im Schwerefeld der Erde (g ≡ Erdbeschleunigung), wenn man Winkel φ
zwischen + 90° und - 90° zuläßt (die Scheibe habe die Masse M und die homogene Dichte ρ,
2
Reibung sei stets ausgeschlossen)? Der Abstand zwischen dem Massenmittelpunkt und dem
Punkt, um den sich die Scheibe bewegen kann, sei s (vergleichen Sie mit der nebenstehenden
Abbildung).
(ii) Welche Bewegung ergibt sich im Sonderfall s = 0, wenn man die Scheibe durch einen
kurzen Stoß in Bewegung setzt?
(iii) Wie lautet die Bewegungsgleichung im Sonderfall s = R?
(iv) Welche Eigenfrequenz ergibt sich bei kleinen Auslenkungen für 0 < s < R?
(v) Welche Eigenfrequenz ergibt sich bei kleinen Auslenkungen im Sonderfall s = R?
c) In der nebenstehenden Skizze ist ein Pendel dargestellt. Das Pendelgewicht ist eine 2,5 kg
schwere, flache und homogene Kreisscheibe mit dem Radius R = 15 cm. Das Pendelgewicht
ist in seinem Schwerpunkt an einen Stab der Länge l = 3 m im Punkt x befestigt (20 cm ≤ x ≤
280 cm). Der Stab selbst ist im Punkt A drehbar gelagert. Die Masse des Stabes kann als
masselos angesehen werden, weiterhin dürfen wieder jegliche Reibungseffekte vernachlässigt
werden.
(i) Berechnen Sie das Massenträgheitsmoment des Pendelgewichts in Abhängigkeit von der
Position x!
(ii) Leiten Sie nun die Bewegungsgleichung für dieses Pendel her!
(iii) Das Pendel werde zur Zeit t = 0 um den Winkel φ0 = φ(t = 0) = 3° nach rechts ausgelenkt
und losgelassen. Berechnen Sie (i) die potentielle Energie und (ii) die kinetische Energie
eines infinitesimalen Massenelements dm des Pendelgewichts zu einer beliebig späteren Zeit t
> 0, wenn das Pendel um den Winkel 0° < |φ(t)| < 3° ausgelenkt ist.
A
l
x
φ
(iv) Berechnen Sie mit den Ergebnissen aus (c) die Gesamtenergie E des Systems! Was gilt
für E - drücken Sie dies mit Hilfe einer mathematischen Beziehung aus!
(v) Zeigen Sie, daß sich die in (ii) aufgestellte Bewegungsgleichung des Pendels aus den in
(iv) gewonnenen Beziehungen herleiten läßt!
(vi) Wie lautet das Winkel-Zeit-Gesetz der Pendelbewegung unter der in (c) gegebenen
Nebenbedingung?
(vii) An welcher Position x muß das Pendelgewicht befestigt sein, damit das Pendel mit der
Frequenz ν = 0,3 Hz schwingt?
Musterlösung
a) Es ist die folgende DGL zu lösen
3
c
D
⋅ x& + ⋅ x = &x& + 2 ⋅ γ ⋅ x& + ω 02 ⋅ x = 0 .
m
m
Als Lösungsansatz wählt man x(t) = e α⋅t . Damit ergibt sich x& (t) = α ⋅ e α⋅t und &x&(t) = α 2 ⋅ e α⋅t .
In die obige DGL eingesetzt ergibt sich (es gilt stets e x ≠ 0∀x )
α 2 ⋅ e α⋅t + 2 ⋅ γ ⋅ α ⋅ e α⋅t + ω 02 ⋅ e α⋅t = 0 = α 2 + 2 ⋅ γ ⋅ α + ω 02 .
&x& +
Die Lösung dieser quadratischen Gleichung lautet α 1,2 = − γ ± γ 2 − ω 02 *.
i) geringe Dämpfung (γ2 < ω02): Hier ergibt sich für
(*) α 1,2 = − γ ± - 1 ⋅ (ω 02 − γ 2 ) = − γ ± − 1 ⋅ ω 02 − γ 2 = − γ ± i ⋅ ω 02 − γ 2 .
Es ergeben sich also voneinander verschiedene und komplexe Wurzeln. Als Lösung ergibt
sich also (α1, α2 ∈ C )
− γ ⋅ t + i⋅ ω 2 − γ 2 ⋅ t
− γ ⋅ t − i⋅ ω 2 − γ 2 ⋅ t
i⋅ ω 2 − γ 2 ⋅t
−i⋅ ω 2 − γ 2 ⋅ t
0
0
0
x(t) = α 1 ⋅ e
+ α2 ⋅ e
= e − γ⋅t ⋅ (α1 ⋅ e 0
+ α2 ⋅ e
)
2
2
ii) starke Dämpfung (γ > ω0 ): Hier ergibt sich als Lösung (die Lösung (*) der obigen
quadratischen Gleichung bleibt hier unverändert – damit ergeben sich reelle, voneinander
verschiedene Wurzeln)
⋅ γ 2 -ω 2 ⋅ t
⋅ γ 2 −ω 2 ⋅t
0
0
x(t) = e − γ⋅t ⋅ (α1 ⋅ e
+ α2 ⋅ e
) (α1, α2 ∈ C ).
2
2
iii) aperiodischer Grenzfall (γ = ω0 ): Aus (*) ergibt sich nun α1,2 = -γ. Die Wurzeln sind
gleich und reell. Als Lösung ergibt sich nun
x(t) = e − γ⋅t ⋅ (α1 + α 2 ⋅ t) .
b)
Vorüberlegungen
Die Bewegungsgleichung für eine punktförmige Masse m, die im Schwerefeld der Erde
Pendelbewegungen ausführt, lautet
für kleine ϕ
g
g
ϕ&&(t) + ⋅ sin{ϕ (t)} = 0
⇒
ϕ&&(t) + ⋅ ϕ (t) = 0.
l
l
Es ergibt sich also eine Bewegungsgleichung, die unabhängig von der Masse des pendelnden
Körpers ist. Mit dem Lösungsansatz: ϕ(t) = A⋅sin(ω⋅t) ergibt sich: ω2 = g/l (ω ist die
Eigenfrequenz des schwingenden Systems).
Bei der gegebenen Kreisscheibe wird die Masse während des Pendelvorgangs nicht
vernachlässigbar sein! Außerdem ist zu beachten, daß man es hier mit einem Problem der
„Rotation starrer Körper“ zu tun hat. Bei der Beschreibung muß man also von der
Translation zur Rotation übergehen - dabei gelten folgende Analogien
Translation
Rotation
rr r
x, v , a, m
r
r
F = m⋅a
r r r
r
r r
r
M D = r ⊗ F = I ⋅ ϕ&&
ϕ ,ω,α, I
Allgemein gilt für die Berechnung eines Massenträgheitsmomentes (MTM): I = ∫ r 2 ⋅ dm .
Außerdem gilt der für die Berechnung von MTM wichtige Steinersche Satz: IP = IS + m⋅s2.
Dabei bezeichtet IS das MTM bezüglich einer Drehachse S, die durch den Schwerpunkt des
betrachteten Körpers geht; s ist der Abstand dieser Drehachse S von der Drehachse P (das zu
dieser Achse gehörende MTM ist IP) und m ist die Masse des Körpers. Es ist zu beachten, daß
die Achsen A und S parallel zueinander stehen!
Lösung
4
i) Der Punkt, um den sich die Scheibe drehen kann, sei P. Dieser Punkt habe vom Mittelpunkt
r
r
r
S den Abstand s = s . Die Gewichtskraft F = M ⋅ g , die am Schwerpunkt S der Kreisscheibe
r
r
r
angreift (also am Mittelpunkt der Scheibe), führt zu einem Drehmoment M D = s ⊗ M ⋅ g ,
welches zu einer Drehung der Kreisscheibe um den Punkt P führt. Dieses Drehmoment hat
den Betrag
r
M D = M D = s ⋅ M ⋅ g ⋅ sin{Φ(t)}.
&& (t) . Dabei ist IP das MTM
Allgemein gilt für den Betrag eines Drehmoments M D = I P ⋅ Φ
bezüglich einer Drehachse, die durch den Punkt P geht. Nach dem Satz von Steiner gilt für IP:
IP = IS + M⋅s2. Das MTM ist die „Antwort“ eines Körpers der Masse M auf eine Drehung des
Körpers und wirkt der Kraft entgegen, die die Drehung verursacht. Es gilt also
&& (t) = −s ⋅ M ⋅ g ⋅ sin{Φ(t)} ⇒ Φ
&& (t) + s ⋅ M ⋅ g ⋅ sin{Φ(t)} = 0.
IP ⋅ Φ
IS + M ⋅ s 2
Das MTM einer Kreisscheibe bezüglich eine Drehachse, die durch den Schwerpunkt S geht,
1
ist IS = ⋅ M ⋅ R 2 (vergleichen Sie mit Aufgabenblatt 6). Damit ergibt sich
2
s⋅M⋅g
&& (t) + s ⋅ M ⋅ g ⋅ sin{Φ(t)} = Φ
&& (t) +
⋅ sin{Φ(t)} =
Φ
2
1
IS + M ⋅ s
⋅ M ⋅ R 2 + M ⋅ s2
2
s⋅g
&& (t) +
=Φ
⋅ sin{Φ(t)} = 0.
1 2
⋅ R + s2
2
Dies ist die gesuchte Bewegungsgleichung.
ii) Vernachlässigt man jegliche Reibung, so vollführt die Scheibe im Sonderfall s = 0 eine
Rotation um ihren Schwerpunkt S mit konstanter Winkelgeschwindigkeit ω, nachdem sie
durch einen kurzen Stoß in Bewegung versetzt wurde.
iii) Im Sonderfall s = R ergibt sich als Bewegungsgleichung (vergleichen Sie mit Teil (i))
R ⋅g
&& (t) +
&& (t) + 2 ⋅ g ⋅ sin{Φ(t)} = 0.
⋅ sin{Φ(t)} = Φ
Φ
1 2
3⋅ R
⋅R + R2
2
iv,v) Die allgemeine Bewegungsgleichung für eine Schwingung lautet
&& (t) + ω 2 ⋅ sin{Φ(t)} = 0 , dabei bezeichnet ω die Eigenfrequenz des schwingenden Systems.
Φ
Für den Fall 0 < s < R ergibt sich aus (i) für die Eigenfrequenz
s⋅g
ω=
.
1 2 2
⋅R +s
2
Für den Fall s = R ergibt sich aus (iii)
2⋅g
.
ω=
3⋅ R
c) Bei der Berechnung dieser Aufgabe wird sich stets auf die folgende Skizze bezogen
5
A
L
Φ
dm
x
x
r
hM
Ψ
R
hdm
Ω
M
Nach dem Satz von Steiner gilt wieder IA(x) = IM + m⋅x2, dabei ist m die Gesamtmasse
1
der Scheibe. Weiterhin ist wieder I M = ⋅ m ⋅ R 2 und damit folgt
2
1
I A (x) = m ⋅ x 2 + ⋅ R 2 .
2
ii) Analog zu Aufgabe (b) ergibt sich auch hier die Bewegungsgleichung (die Herleitung ist
identisch)
x ⋅m⋅g
&& (t) = − x ⋅ m ⋅ g ⋅ sin{Φ(t)} ⇒ Φ
&& (t) +
IA ⋅ Φ
⋅ sin{Φ(t)} = 0.
2 1 2
m⋅x + ⋅R
2
iii) Betrachtet wird das infinitesimale Massenelement dm, welches in der obigen Skizze
eingezeichnet ist. Betrachtet wird ein Zeitpunkt t > 0 und es gelte 0° < |Φ(t)| < 3°.
Aus dieser Skizze ergibt sich
L2 = x 2 + r 2 − 2 ⋅ r ⋅ x ⋅ cos(Ψ ) (Kosinussatz),
i)
cos(Φ (t)) =
x − hM
⇒ h M = x ⋅ (1 − cos(Φ (t)) und hdm = r⋅sin(Ω).
x
Da es sich bei dem Pendelgewicht um eine dünne Kreisscheibe handelt, gilt weiterhin
m
m
dm
dm
dm
=
=
=
=
.
2
A π⋅R
dA r ⋅ dΨ ⋅ dr r ⋅ dΩ ⋅ dr
Dabei ist dm eine Funktion des Winkels (Ψ oder Ω) und des Abstandes r vom
Kreismittelpunkt (dm = dm(Ω,r) bzw. dm = dm(Ψ,r)).
Bewegt sich nun dm von seiner Position aus in einer Zeit dt um einen kleinen Winkel dΦ(t)
weiter, so legt es dabei den Weg ds(t) = L⋅dΦ(t) und erreicht dabei die Geschwindigkeit
ds
dΦ (t)
v=
= L⋅
. Somit ergibt sich für die kinetische Energie des infinitesimalen
dt
dt
Massenelements dm
1
1 m
& 2 (t) . Draus folgt
dE kin = ⋅ dm ⋅ v 2 = ⋅
⋅ r ⋅ dΨ ⋅ dr ⋅ L2 ⋅ Φ
2
2 π⋅R2
1 m
& 2 (t) ⋅ dΨ ⋅ dr
dE kin = ⋅
⋅ r ⋅ (x 2 + r 2 − 2 ⋅ x ⋅ r ⋅ cos(Ψ)) ⋅ Φ
2
2 π⋅R
Für die potentielle Energie von dm ergibt sich nun
6
dE pot = g ⋅ dm ⋅ h = g ⋅
m
⋅ r ⋅ dΩ ⋅ dr ⋅ (h dm + h M ) , also
π⋅R2
m
⋅ r ⋅ dΩ ⋅ dr ⋅ (r ⋅ sin(Ω ) + x ⋅ (1 − cos(Φ (t)))) .
π⋅R2
iv) Daraus ergibt sich nun die Gesamtenergie E der Scheibe
E Ges = ∫ (dE kin + dE pot ) = ∫∫ dE kin + ∫∫ dE pot .
dE pot = g ⋅ dm ⋅ h = g ⋅
r = 0 → R,
Ψ = 0 → 2⋅π
r = 0→ R,
Ω = 0 → 2⋅π
1
& 2 (t) + m ⋅ g ⋅ x ⋅ (1 − cos(Φ (t))) .
E Ges = ⋅ I A ⋅ Φ
2
Weiterhin ist stets die mechanische Gesamtenergie eines reibungsfreien mechanischen
Systems eine Erhaltungsgröße, es gilt also EGes = konst und damit E& Ges = 0 .
v) Leitet man nun die in (iv) gefundene Beziehung für EGes nach der Zeit ab, so ergibt dies
(für alle Zeiten t)
& (t) ⋅ Φ
&& (t) - m ⋅ g ⋅ x ⋅ (sin(Φ (t)) ⋅ Φ
& (t) ) ,
E& Ges = 0 = (I A ⋅ Φ
&& (t) - m ⋅ g ⋅ x ⋅ (sin(Φ (t)) ) ⋅ Φ
& (t) .
0 = (I ⋅ Φ
A
Diese Beziehung kann nur dann für alle Zeiten null sein, wenn gilt
&& (t) - m ⋅ g ⋅ x ⋅ (sin(Φ (t)) ( Φ
& (t) ist nicht für alle Zeiten null)
0 = IA ⋅ Φ
und dies ist die gesuchte Bewegungsgleichung, die bereits in (ii) hergeleitet wurde.
x ⋅m⋅g
.
vi) Als Winkel-Zeit-Gesetz ergibt sich Φ(t) = 3°⋅cos(ω⋅t) mit ω =
2 1 2
m⋅x + ⋅R
2
x ⋅m⋅g
. Löst man diese
2 1 2
m⋅x + ⋅R
2
Gleichung nach x auf und löst die sich ergebende quadratische Gleichung, so ergeben sich als
Lösungen x1 = 0,004 m und x2 = 2,76 m. Somit muß das Pendelgewicht bei x2 = 2,76 m
befestigt werden, damit das Pendel mit einer Frequenz von 0,3 Hz schwingt.
vii) Aus (vi) ergab sich ω = 2 ⋅ π ⋅ ν = 0,6 ⋅ π Hz =
7