Vorlesung Experimentalphysik I am 14
Werbung

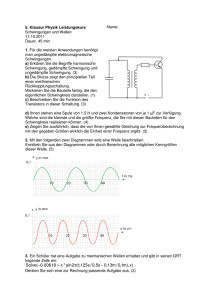
1 Vorlesung Experimentalphysik I am 14.12.1998 und 15.12.1998 J. Ihringer 4 Schwingungen und Wellen Schwingungen sind zeitlich periodische Zustandsänderungen in einem System. Eine beliebige physikalische Größe schwingt, wenn ihr Betrag in jedem Augenblick ihrer zweiten Ableitung nach der Zeit entgegengesetzt, aber proportional ist. Die Proportionalitätskonstante ist das Quadrat der Kreisfrequenz. Man denke an die Auslenkungen eines mechanischen Pendels: Die Auslenkung ist zu ihrer zweiten zeitlichen Ableitung, der Beschleunigung, immer entgegengesetzt, aber proportional. Im elektrischen Schwingkreis verhalten sich Ladung und ihre zweite Ableitung analog. Wellen sind wie Schwingungen periodische Funktionen, die aber nicht nur in der Zeit, sondern auch im Raum periodisch sind. In Systemen mit Schwingungen und Wellen gibt es einen Gleichgewichtszustand und rücktreibende Kräfte, die bei Störungen das Gleichgewicht wieder herzustellen versuchen. Die Ursache für die Kräfte sind in starren Körpern Federn, in Gasen und Flüssigkeiten Drucke, bei Diffusion Dichtegefälle, in elektrischen Schwingkreisen elektrische Felder. Ein schwingendes System kann beliebig viele schwingende Objekte enthalten: Das Federpendel enthält nur einen Massenpunkt, ein Kristall aus einem mol eines Stoffes 6 10 23 schwingende Bausteine. Bei gekoppelten Objekten spricht man von gekoppelten Schwingungen. Gekoppelte Teilchen schwingen im allgemeinen abwechselnd mehr oder weniger stark, die Energie wandert zwischen den Teilchen hin und her. Es gibt aber spezielle Schwingungen, bei denen alle Teilchen auf gleichbleibende Art schwingen: Das sind die Eigenschwingungen des Systems. Ihre Anzahl und Schwingungsform ist für das System spezifisch. Alle anderen Schwingungen sind Überlagerungen von Eigenschwingungen. Sie führen zu dem oben genannten schwer zu durchschauenden Muster abwechselnd bewegter Teilchen, das aus der Betrachtung kaum Rückschlüsse auf das System erlaubt. Abbildung 1 Die Lichtspiele auf den Steinen entstehen durch Lichtbrechung an den in Raum und Zeit veränderlichen Wellen an der Oberfläche des Wassers 2 4.1 Schwingungen Die Verknüpfung der rückstellenden Kräfte mit einer Auslenkung aus der Gleichgewichtslage kann man als Rückkopplung bezeichnen. Schwingungen gibt es immer dann, wenn die Rückkopplung ein Zeitverhalten zeigt, daß die Antwort entgegengesetzt zur zweiten Ableitung der Störung wird. Durch geeignete Rückkopplungen werden biologische Systeme zu Schwingungen angeregt, die den 24 Stunden Takt vieler Lebensvorgänge steuern: Bei entsprechender Rückkopplung können beliebige Systeme zu Schwingungen angeregt werden. Das sei an einem Schiff gezeigt, das mit Motorkraft längs einer Boje manövriert mit dem Ziel, daß die Boje mittschiffs zum Liegen kommt. Das Schiff liege anfangs ein Stück hinter der Boje und beim Start der Maschine stehe der Maschinentelegraph auf voller Fahrt voraus. Die Motorkraft könne aufgrund der Mechanik nur stetig und langsam verändert werden. Der Kapitän sorgt für die Rückkopplung, indem er nach Beobachtung der Geschwindigkeitsanzeige versucht, die Beschleunigung entsprechend einzustellen. Durch die Trägheit des Schiffes und die Verzögerung in der Ansteuerung des Motors kommt die Fahrt des Schiffs ins Schwingen. Es ist unmöglich, mit diesen Startbedingungen und dieser Mechanik an der Boje mittschiffs anzuhalten. 3 Geschwindigkeitsan zeige Maschinentelegraph a b c d Abbildung 2 Schwingung in rückgekoppelten Systemen: Ein Schiff liegt hinter der Boje, diese soll mittschiffs zu liegen kommen. Die Fahrt beginne mit voller Kraft voraus (a), der Kapitän versucht gleich, die Beschleunigung zurückzunehmen. Die Mechanik zur Motoransteuerung sei aber schwergängig, deshalb kommt die Maschine erst dann zum Stand, wenn die Boje schon mittschiffs liegt (b). Um anzuhalten gibt er jetzt zunehmend Kraft rückwärts, das Schiff wird langsamer bis es bei voller Kraft rückwärts wieder steht (c) und nach rückwärts losfährt. Jetzt nimmt der Kapitän die Kraft rückwärts zurück, bei der Boje mittschiffs stoppt die Maschine bei höchster Fahrt zurück und gibt jetzt zunehmend Fahrt voraus. 4 4.1.1 Harmonische Schwingungen Eine harmonische Schwingung ist die Lösung der Bewegungsgleichung für eine Größe, deren Betrag in jedem Augenblick ihrer zweiten Ableitung nach der Zeit entgegengesetzt, aber proportional ist. Die Winkelgeschwindigkeit ist nur durch die Größen der Bewegungsgleichung bestimmt, sie ist unabhängig von der Amplitude. Die Amplitude ist frei wählbar, sie ist konstant und behält deshalb ihren Wert der maximalen Auslenkung bei Beginn der Schwingung („Anfangswert“) bei. Formel Erläuterung m x k x x(t ) r sin t 0 Bewegungsgleichung des „harmonischen Oszillators“ Lösung der Gleichung: Die „harmonische Schwingung“ Amplitude, jeder Wert erfüllt die Bewegungsgleichung r t 0 Phase, 0 Anfangsphase Mit diesem Lösungsansatz ergibt sich: x(t ) r 2 sin t 0 m 2 k Zweite Ableitung der Funktion x(t ) und x(t ) in die Bewegungsgleichung eingesetzt Es folgen die Lösung für die Winkelgeschwindigkeit, r und 0 sind beliebig wählbar: 2 k T m Winkelgeschwindigkeit, T ist die Periode der Schwingung Tabelle 1 Die harmonische Schwingung. 4.1.1.1 Das Zeigerdiagramm Die momentane Auslenkung einer Schwingung ist durch ihren Betrag und ihre Phase gegeben. Die Information enthält also zwei Komponenten, die man am besten als eine komplexe Zahl angibt. Man wählt dazu die Form der komplexen Exponentialfunktion, weil in dieser Schreibweise Betrag und Phase klar getrennt hervortreten. Außerdem kann die Exponentialfunktion bequem differenziert- bzw. integriert werden. Formel r e i e i cos i sin 1 cos e i e i 2 1 i e e i sin 2i r e i r cos i r sin Anmerkung Komplexe Zahl mit Betrag r und Phase Eulersche Beziehung Winkelfunktionen in komplexer Schreibweise Aufteilung in Real- und Imaginärteil: Realteil Imaginärteil r cos r sin Tabelle 2 Komplexe Exponentialfunktion und Eulersche Beziehung 5 Die Schwingung kann auf die Bewegung eines Punktes zurückgeführt werden, der sich mit konstanter Winkelgeschwindigkeit auf einer Kreisbahn bewegt. Die zeitliche Abhängigkeit der Auslenkung einer harmonischen Schwingung ist dann die Projektion eines mit konstanter Winkelgeschwindigkeit umlaufenden Zeigers auf die x- oder y-Achse. Zur Darstellung von Kreisbewegungen ist die komplexe Zahlenebene besonders geeignet, weil Radius und Phasenwinkel als Betrag und Richtung des Zeigers, der als komplexer Vektor aufgefaßt wird, unmittelbar abzulesen sind. Harmonische Schwingung im Zeigerdiagramm Verknüpfung zum Komponente komplexen Vektor x r cos( t 0 ) Realteil y r sin( t 0 ) Vektor in der komplexen Zahlenebene r e i t Imagiärteil 0 r sin t 0 t F1 F2 1,0 r 0,5 x, y 0 0,0 -0,5 -1,0 x, y 0 1 1,0 0,5 0,0 -0,5 -1,0 0 1 2 r cost 0 2 3 t 4 5 6 Darstellung einer komplexen Zahl als Vektor mit Betrag und Phase: Die beiden kartesischen Komponenten beschreiben eine harmonische Schwingung, wenn der Zeiger mit konstanter Winkelgeschwindigkeit rotiert. 3 t 4 5 6 F1 F2 Tabelle 3 Auslenkungen der harmonischen Schwingung als Komponenten eines Zeigers in der komplexen Zahlenebene 6 4.1.2 Überlagerung und Zerlegung von Schwingungen Schwingungen können überlagert werden. Man konstruiert dazu den Zeiger der Summe als vektorielle Summe der Zeiger der Komponenten im Zeigerdiagramm. Außer diesen harmonischen Schwingungen gibt es Rechteck- und Sägezahnschwingungen, die als Summe harmonischer Schwingungen dargestellt werden können. Diese Zerlegung bezeichnet man als Fourier-Analyse (Näheres folgt beim Kapitel über Optik). Versuch 1 Sinus- Sägezahn- und Rechteck-Schwingung am Oszilloskop 4.1.2.1 Lissajous-Figuren Lissajous Figuren entstehen, wenn die Auslenkung einer Schwingung gegen die zeitgleiche Auslenkung einer zweiten Schwingung aufgetragen wird. Das entstehende Bild hängt vom Verhältnis der Frequenzen beider Komponenten und von der Phasenlage beider Schwingungen ab. Feststehende, geschlossene Kurven erhält man, wenn sich die Frequenzen wie ganze Zahlen verhalten. In der Abbildung wurden als Beispiel die Lissajous Figuren für die Frequenzverhältnisse 1:2 und 1:2,1 berechnet. Durch Beobachtung der Lissajous Figur kann man Frequenzen gut vergleichen und auf Vielfache abstimmen. 1,0 1,0 0,5 0,5 sin(2.1 t) sin(2t) B 0,0 0,0 -0,5 -0,5 -1,0 -1,0 -1,0 -0,5 0,0 sin(t) 0,5 1,0 B -1,0 -0,5 0,0 0,5 1,0 sin(t) Abbildung 3 Lissajous Figuren für das Frequenzverhältnis y: x=2:1 (links) und y:x=2,1:1 (rechts). Versuch 2 Lissajous Figuren für unterschiedliche Frequenzen an der x- und y- Achse des Oszilloskops 4.1.2.2 Schwebungen Werden Schwingungen mit gleicher Ausbreitungsrichtung überlagert und unterscheiden sich die Frequenzen nur wenig, dann erhält man eine neue Frequenz, die der Schwebung. Die Einhüllende der Summe beider Komponenten zeigt eine Modulation, die in auf- und abschwellender Lautstärke, die man als Schwebung bezeichnet, hörbar wird. 7 Schwebungen: Schwingungen, die sich überlagern: 2 X 1 x1 A sin t 0 -1 x2 A sin t -2 0 2 4 6 8 10 t Die Überlagerung x x1 x2 von Schwingungen ähnlicher Frequenz heißt Schwebung, sie ist die Frequenz der Einhüllenden der Summe der Komponenten: Überlagerung beider Schwingungen, die Schwebungsfrequenz ist . Die Berechnung 2 ist am klarsten in komplexer Schreibweise: 2 X 1 x A (sin t sin t e it e i t e it (1 e it ) 0 e -1 e -2 0 2 4 6 8 t it (e i t 2 i t 2 e i t 2 2 cos e i t 2 e i t 2 ) t 2 10 x Re( ) 2 sin t cos t 2 2 Tabelle 4 Schwebungen: Addition von zwei Schwingungen, deren Frequenzen sich nur wenig unterscheiden. Versuch 3 Schwebung: Überlagerung von Schwingungen ähnlicher Frequenz bis zur Überlagerung von um eine Oktave entfernten Schwingungen 4.1.3 Gedämpfte Schwingungen Wie jede Bewegung unter realen Bedingungen wird auch die harmonische Schwingung durch Reibung gedämpft. Wird keine Energie zugeführt, dann klingt die Schwingung nach einiger Zeit ab, indem ihre Amplitude immer kleiner wird. Die mathematische Behandlung zeigt, daß die Amplitude exponentiell mit der Zeit abklingt. Dazu wird die Bewegungsgleichung des harmonischen Oszillators um einen Term für die Reibungskraft erweitert. Dieser wird proportional zur Geschwindigkeit angesetzt. Wird die Dämpfung immer stärker, dann geht schließlich eine einmalige Auslenkung exponentiell gedämpft in die Ruhelage zurück. Der aperiodische Grenzfall ist erreicht. Bei noch höherer Dämpfung wird die Rückkehr der Auslenkung in die Ruhelage als „kriechen“ bezeichnen. 8 Formel Erläuterung Bewegungsgleichung des „harmonischen Oszillators“ bei Reibung Lösung der Gleichung: Die gedämpfte harmonische Schwingung Amplitude, exponentiell gedämpft m x k x R x x(t ) A(t ) sin t r sin t e t A(t ) r e t Man findet die Lösung am leichtesten bei einem Ansatz mit komplexer Schreibweise: (t ) r e i t t Zeiger in der komplexen Ebene (t ) i (t ) Erste Ableitung der Funktion (t ) i 2 (t ) Zweite Ableitung der Funktion Funktion und Ableitungen in die Bewegungsgleichung eingesetzt Aus dem Vergleich der Real- und Imaginärteile zu beiden Seiten der Gleichung folgen die Lösungen für die Kreisfrequenz und die Dämpfungskonstante : Die Kreisfrequenz ist gegenüber dieser des ungedämpften Oszillators verstimmt. Wenn die Wurzel imaginär wird, 2 k 2 dann ist die Schwingung überdämpft: Die einmalige T m Auslenkung geht exponentiell gegen Null. m 2 2 i m k R i R R 2m Dämpfungskonstante Tabelle 5 Herleitung der gedämpften Schwingung. Die reelle Lösung ist gleich dem Realoder Imaginärteil des Zeigers (t ) in der komplexen Ebene. F1 1,0 0,8 0,6 0,4 Y Axis Title x(t ) 0,2 0,0 -0,2 -0,4 -0,6 -0,8 0 5 10 15 t X Axis Title Abbildung 4 Gedämpfte Schwingung: x(t ) sin( t ) e 0.2t 20 25 30 9 4.1.4 Erzwungene Schwingung Ein zur freien Schwingung fähiges System, seine Eigenfrequenz sei 0 , werde durch einen äußeren Antrieb mit Frequenz in Bewegung gesetzt. Der Antrieb prägt dann der Schwingung des Systems seine eigene Frequenz auf. Das System reagiert auf unterschiedliche Antriebsfrequenzen mit Änderungen in der Amplitude und in der Phase: i System mit Eigenschwingung 0 Die Amplitude der Auslenkung hängt vom Verhältnis der Antriebs- zur Eigenfrequenz ab. Das gleiche gilt für die Phase zwischen der Schwingung des Antriebs und der Schwingung des Systems. In Worten des Alltags: Bei zu hoher Frequenz des Antriebs kommt der Oszillator nicht mehr mit, er zittert nur noch im Gegentakt zum Antrieb, also mit einer halben Periode Phasenverschiebung, und die Amplitude ist klein. Wird die Antriebsfrequenz bis zur Eigenfrequenz verkleinert, dann kommt das System in Resonanz. Der Antrieb läuft der Schwingung des Systems nur noch um eine viertel Periode voraus, die Amplitude wird immer größer. Ohne Dämpfung kommt es zur „Resonanzkatastrophe“, das System zerfällt, weil die Amplituden jedes Maß überschreiten. Amplitude 4 2 0,0 0,2 0,4 0,6 0,8 1,0 1,2 D 0,5 Antr 1,0 iebs frequ enz/ Eige nfreq uenz äm pf un g 0 0,0 1,5 1,4 2,0 Abbildung 5 Amplitude einer erzwungenen Schwingung in Abhängigkeit von dem Verhältnis zwischen Antriebs- und Eigenfrequenz und der Dämpfung. Die Resonanzkurve wird mit abnehmender Dämpfung schärfer 10 100 50 0 0,0 0,5 1,0 1,5 2,0 2,5 0,0 0,5 1,0 1,5 2,0 2,5 3,0 3,0 g fun mp Dä Phase zwischen Antrieb und Oszillator 150 Antriebsfrequenz/Eigenfrequenz Abbildung 6 Phase zwischen Antrieb und Schwingung des Systems in Abhängigkeit des Verhältnisses zwischen den Amplituden und der Dämpfung Liegt die Antriebsfrequenz unterhalb der Eigenfrequenz, dann läuft das System dem Antrieb mit nur wenig Abweichung in Amplitude und Phase nach. Man erkennt an den Bildern, daß bei genügend großer Dämpfung die Amplitude bei der Resonanzfrequenz nicht mehr überhöht ist. An den Phasen ist aber auch dann zu erkennen, ob die Antriebsfrequenz kleiner oder größer als die Eigenfrequenz ist. Versuch 4 Erzwungene Schwingung: Die Eigenfrequenz des freien Systems liegt bei70 Hz. Man steigert die Antriebsfrequenz, beginnend bei 65 Hz und fährt über die Resonanzstelle zu höheren Frequenzen. Versuch 5 Resonante Anregung von 3 Pendeln unterschiedlicher Eigenfrequenzen. Versuch 6 Im Zungenfrequenzmesser stehen Zungen unterschiedlicher Eigenfrequenz bereit, die in Resonanz befindliche zeigt die Frequenz der Erregung. 4.1.5 Eigenschwingungen, gekoppelte Systeme Dieses Thema ist deshalb so wichtig, weil Moleküle und kristalline Festkörper Systeme gekoppelter mechanischer Oszillatoren sind. Nur aus dieser Sicht ist ihr Verhalten bei Zufuhr von Wärme zu verstehen. In ihnen sind die Atome durch Wechselwirkungskräfte verbunden, die bei kleinen Auslenkungen annähernd dem Hookeschen Gesetz folgen. Die Anregung zur Auslenkung erfolgt durch die Temperaturbewegung der Teilchen in ihrer Umgebung. Das bei Betrachtung eines Systems zufällig erscheinende Auslenkungsmuster ist eine Überlagerung spezieller Schwingungszustände, den Eigenschwingungen, die für jedes System spezifisch sind. Das einfachste gekoppelte System ist das Doppelpendel, das als Modell für ein 11 zweiatomiges Molekül verstanden werden kann. Die dabei gewonnenen Erkenntnisse erlauben einen Ausblick auf gekoppelte Systeme mit beliebig vielen Teilchen. Bewegungsart Auslenkungsmuster Auslenkung Anmerkung Beliebig Die Pendel schwingen abwechselnd stärker und schwächer, während eines steht schwingt das andere maximal. Die Feder wird abwechselnd beansprucht. Mit gleicher Amplitude in gleiche Richtung Erste Eigenschwingung: Die Pendel schwingen in Gleichphase mit der Eigenfrequenz der freien Pendel, die Feder wird gar nicht beansprucht. Mit gleicher Amplitude in entgegenges etzteRichtun g Zweite Eigenschwingung: Die Pendel schwingen in Gegenphase, die Feder ist immer in Aktion Beliebig. Durch Vermittlung der Feder wandert die Energie zwischen den Pendeln hin und her. Eigenschwingungen: Beide Pendel schwingen zeitlich konstant. Es wird keine Energie zwischen den Pendeln ausgetauscht. Tabelle 6 Schwingungszustände des Doppelpendels Die Eigenschwingungen sind kollektive Schwingungszustände des ganzen Systems, die sich dadurch auszeichnen, daß jeder Körper mit konstanter Frequenz und Amplitude schwingt. Zu jeder Eigenschwingung gehört eine bestimmte Frequenz, die Eigenfrequenz, mit der sich alle an dieser Schwingung beteiligten Körper bewegen. Die Auslenkungsmuster von Eigenschwingungen unterscheiden sich in ihrer Symmetrie und stehen orthogonal zueinander, d. h., das Skalarprodukt zwischen Auslenkungen zu unterschiedlichen Eigenschwingungen ist Null. Die Anzahl der Eigenschwingungen entspricht immer der Anzahl der Freiheitsgrade: Das ist das Produkt aus der Anzahl N der Teilchen und dessen Freiheitsgrade, im Raum 3 für Auslenkungen in Richtung x, y und z, also 3N . Im Doppelpendel gibt es 2 „Teilchen“, die aber jeweils nur einen Freiheitsgrad zeigen, nämlich die Auslenkung in eine einzige Richtung. Deshalb gibt es gerade 2 Eigenschwingungen. Allgemein gilt: Jede beliebige Schwingung eines Systems kann als die Überlagerung seiner Eigenschwingungen gedeutet werden. In Systemen mit mehreren Freiheitsgraden kann man die Auslenkungsmuster der Eigenschwingungen nicht mehr durch Anschauung erkennen. Es gibt aber mathematische 12 Verfahren, die „Hauptachsentransformation“, die aus einem allgemeinen Ansatz der Bewegungsgleichung die Eigenschwingungen errechnen. Versuch 7 Eigenschwingungen des gekoppelten Pendels. Bei Verkürzung eines der Pendel ändern sich die Eigenschwingungen Versuch 8 Eigenschwingung am Torsionspendel: Die beiden Freiheitsgrade sind Torsion und Dehnung. Man suche die beiden Eigenschwingungen Versuch 9 Eigenschwingungen der Saite Versuch 10 Eigenschwingung der kreisförmigen Scheibe 4.2 Wellen Wellen sind Schwingungen, die sich in Raum und Zeit ausbreiten. Bei Schwingungen von Teilchen ist nur die Richtung ihrer Auslenkungs im Raum definiert, bei der Welle noch die Richtung ihrer Ausbreitung hinzu. Man spricht von Transversalwellen, wenn die Richtung der Auslenkung senkrecht zur Ausbreitungsrichtung steht, bei Longitudinalwellen sind Auslenkung und Ausbreitung gleichgerichtet. Versuch 11 Transversalwellen werden an einer drehbaren Spirale gezeigt: Man sieht in der Projektion durch einen Spalt daß die Teilchen senkrecht schwingen, ohne Spalt sieht man die Welle sich waagrecht ausbreiten. 4.2.1 Die Wellengleichung Die Wellengleichung gilt für unterschiedliche Wellenarten, sie läßt sich leicht für eine longitudinale Welle in einer linearen Kette aus mit Federn verbundenen Massen herleiten. i Abbildung 7 Lineare Kette mit Massenpunkte im Abstand a mit Massen m und Federn mit Federkonstante D. Der Vektor i zeigt die Auslenkung des Teilchens i bei einer Longitudinalschwingung, gleiches gilt für die Nachbarn. 13 Formel m i D i 1 i D i i 1 i 1 i a i i 1 a d dx xi a 2 d dx xi a 2 d dx xi a 2 d dx xi a 2 d 2 a 2 dx Anmerkung Bewegungsgleichung für das Teilchen i Die Abstände zu den Nachbarn werden durch die Ableitungen nach x zu beiden Seiten des Teilchens i ersetzt Die Differenz der Ableitungen ist die zweite Ableitung nach x. Diese wird in die Bewegungsgleichung eingesetzt. Damit erhält man: xi D a2 m ( x, t ) 0 sin k x t Die Wellengleichung Lösung der Wellengleichung k 2 2 2 2 2. Ableitungen der Lösung Aus dem Vergleich dieser Beziehung mit der Wellengleichung ergibt sich k v 2 2 k2 D a2 m v ist die Ausbreitungsgeschwindigkeit. Tabelle 7 Die Wellengleichung und ihre Lösung Für Wellen in unterschiedlichen Medien zeigt die Wellengleichung die gleiche Gestalt, die Ausbreitungsgeschwindigkeit hängt von den Materialeigenschaften ab: Art der Welle Longitudinal Transversal Transversal Longitudinal Longitudinal v2 Materialkonstante E G E Elastizitätsmodul Festkörper G Scherungsmodul K K Kompressionsmodul p Druck Cp CV p Medium Zugspannung Seil Flüssigkeit Tabelle 8 Materialabhängige Ausbreitungsgeschwindigkeit für Wellen Gas 14 4.2.2 Die Ausbreitungsgeschwindigkeit von Wellen Die Ausbreitungsgeschwindigkeit beschreibt, wie schnell sich ein Wellenberg im Ortsraum bewegt. Nach dieser Definition wird der Ort eines Maximums zu zwei Zeiten ermittelt, der Quotient aus Orts- und Zeitdifferenz ist die Ausbreitungsgeschwindigkeit. 2 x 2 t T 2 0 1 2 x x 2 t t T 1,0 Auslenkung (x,t) 0,5 0,0 -0,5 -1,0 2 3 4 5 6 7 x Abbildung 8 Welle zur Zeit t und t+ t Formel t T 2 x x t t 2 2 T 2 x t 2 0 T x t T k 2 T 2 k 2 x 2 Anmerkung Bedingung für maximale Auslenkung: Das Argument der sin-Funktion ist 2 Maximale Auslenkung zur Zeit t t Aus der Differenz beider Gleichungen folgt: Die Ausbreitungsgeschwindigkeit ist der Quotient aus Kreisfrequenz und Wellenzahl Kreisfrequenz, Winkelgeschwindigkeit zur Periode T Tabelle 9 Ausbreitungsgeschwindigkeit einer Welle Wellenzahl zur Wellenlänge 15 4.2.3 Reflexion, Brechung und Interferenz von Wellen Weil die Ausbreitungsgeschwindigkeit von der Dichte des Mediums abhängt, werden Wellen beim Übergang zwischen Medien unterschiedlicher Dichte zum Teil reflektiert und zum Teil durchgelassen, wobei sich die Richtung ändern kann: Die Welle wird gebrochen. Dabei erfolgt die Brechung beim Übergang vom Medium mit größerer Ausbreitungsgeschwindigkeit (kleinere Dichte) zu dem mit kleinerer (höhere Dichte) immer zum Lot auf die Grenzfläche hin. Diese Effekte sind vor allem in der Optik und allgemein für elektromagnetische Wellen von großer Bedeutung, sie treten aber ebenso bei mechanischen Wellen auf. Als Interferenz bezeichnet man die Überlagerung von Wellen, die von unterschiedlichen Orten ausgehen. Versuch 12 In einer Wasserwanne mit flachem Ufer, um Reflektionen zu vermeiden (vgl. Strandbad in Freiburg), werden mit einem Oszillator Kugel- und Planwellen erzeugt. Die Planwelle wird a) mit einem Parabolspiegel fokussiert b) an einem Spalt gebeugt c) an einer Plexiglasplatte zum Lot hin gebrochen. Mit einer 2-Punkt Anregung werden Interferenzen beobachtet: Von unterschiedlichen Punkten ausgehende Wellen überlagern sich. 4.2.4 Stehende Wellen Wird eine Welle an einem Medium reflektiert, dann interferiert sie mit sich selbst. Die einlaufende und die auslaufende Welle überlagern sich, man erhält eine stehende Welle. In Abhängigkeit von der Dichte des Mediums, an dem reflektiert wird, entstehen an der Grenze „Knoten“ oder „Bäuche“. Damit immer eine konstruktive Interferenz möglich ist, muß die Länge des schwingenden Mediums auf die Wellenlänge abgestimmt sein: Ende Anfang Dicht (Knoten) 2 Dicht (Knoten) n Dünn (Bauch) (2n 1) Dünn (Bauch) (2n 1) 4 n 2 4 Tabelle 10 Längen eines Wellenträgers im Verhältnis zur Wellenlänge bei unterschiedlich abgeschlossenen Enden Versuch 13 Stehende Wellen werden mit zwei gegenläufigen Spiralen gezeigt Versuch 14 Eine stehende Transversalwelle wird mit 30, 60 und 90 Hz angeregt Versuch 15 Eine eingespannte Feder wird zu Schwingungen angeregt, es bilden sich sichtbare Knoten Versuch 16 Die Wellenmaschine für Transversalwellen erzeugt zunächst stehende, dann laufende Wellen. Abschluß zunächst ohne „Sumpf“: a) Auslenkung oben, die Welle läuft abwärts, wird am freien Ende reflektiert und läuft auf der anderen Seite wieder hoch. b) Wie a), aber mit festem Ende: Die Welle läuft auf der gleichen Seite wie abwärts wieder hoch c) Anregung unten, oben ohne Sumpf: Stehende Wellen d) Anregung unten, oben mit Sumpf: Die Welle läuft unreflektiert aus. 16 4.2.5 Schallwellen Schallwellen sind Longitudinalwellen, weil die Moleküle in Gasen wie auch in Flüssigkeiten keine Kräfte senkrecht zu ihrer Auslenkung weitergeben. Die Anregung der Teilchen wird durch Stoß weitergeleitet, es resultieren Druckschwankungen. Die Lautstärkeempfindung durch unsere Ohren ist ein Maß für die Fläche des Trommelfells auftreffende Energie pro Zeiteinheit, was man als Energieflußdichte bezeichnet. 4.2.5.1 Welle der Auslenkung und Welle des Drucks Die Kraft zur Beschleunigung der Teilchen in einem kleinen, einer Scheibe ähnlichen Volumen ist gleich der Differenz der Kräfte durch den Druck auf die Flächen der Scheibe. Berechnet man die Beschleunigung für die Welle der Auslenkung und setzt diese in die Kräftegleichung ein, dann ergibt sich eine Welle für den Druck, die aber gegenüber der Auslenkung um 2 phasenverschoben ist. Man findet auch den Zusammenhang zwischen der Geschwindigkeit der Auslenkung (Schallschnelle) und der Amplitude des Drucks. Formel ( x, t ) 0 sin( k x t ) 0 cos(k x t ) u 0 0 v dm k 2 A p( x) A p( x dx) t 2 Anmerkung Auslenkung der Schallwelle Geschwindigkeit der Auslenkung Amplitude der Geschwindigkeit der Auslenkung: „Schallschnelle“ Ausbreitungsgeschwindigkeit v , Winkelgeschwindigkeit und Wellenzahl k Bewegungsgleichung der Schallwelle, in Auslenkung und Druck formuliert: p( x dx) p (x ) ( x, t ) A dx 2 p A p A p dx 2 x t 2 p 2 x t 0 2 sin( t kx) Fläche A x p x p( x, t ) 0 2 sin( t kx) dx x dx Bewegungsgleichung, die zweimal nach der Zeit differenzierte Auslenkung eingesetzt Den Druck erhält man durch Integration über x , die Integrationskonstante ist der mittlere Druck p 1 ohne Welle. Man erkennt, daß der Druck p( x, t ) p 0 2 cos(t kx) gegenüber der Auslenkung der Teilchen in der k 17 verschoben ist. Für die 2 Druckamplitude folgt, mit u 0 0 und v : k Phase um p( x, t ) p p0 cos(t kx) p0 0 2 1 u0 v k Druckamplitude, Schallschnelle und Schallgeschwindigkeit Tabelle 11 Auslenkungs- und Druckamplitude 4.2.5.2 Energie und Energieflußdichte der Schallwelle Die Energie einer Schallwelle in einer Volumeneinheit des Mediums ist der zeitliche Mittelwert der Bewegungsenergie der darin befindlichen Teilchen: Formel Anmerkung Geschwindigkeit der Teilchen: ( x, t ) Ekin 1 2 V 2 Volumenein heit, Masse: 1 Ekin 1 2 u0 cos 2 kx t V 2 Ekin 1 2 u 0 cos 2 kx t V 2 E kin 1 2 u0 V 4 Der Mittelwert der cos 2 Funktion ist ½, damit folgt: Die potentielle Energie ist gleich groß wie die kinetische, deshalb ist die Gesamtenergie: E 1 2 u0 V 2 I Mittlere Bewegungsenergie der Teilchen E v V 2 1 1 p 2 I v u0 0 2 2 v Energiefluß durch die Einheitsfläche in einer Zeiteinheit: z.B. Fläche des Trommel sfells v Tabelle 12 Energieflußdichte der Schallwelle 4.2.5.3 Schallmessung Für die Schallmessung ist wichtig, daß die subjektive Empfindung der Lautstärke etwa logarithmisch mit der Intensität verläuft. Das ist der Inhalt des Weber-Fechnerschen Gesetzes. Der Schallpegel wird deshalb in Dezibel [dB] angegeben. Das ist ein logarithmisches Maß für die Intensität der Schallwelle in Vielfachen der Intensität an der Hörschwelle. Letztere ist auf 18 10-12 W/m2 festgesetzt, entsprechend einem Schalldruck von 20 Pa . Die Angabe einer Lautstärke in Phon für einen Ton mit beliebiger Frequenz bezieht sich auf den Schallpegel eines Vergleichstones mit 1kHz, der als genauso laut wie der zu messende empfunden wird. Die Phonzahlen (vgl. die Kurve in der folgenden Abbildung) werden in Meßinstrumenten durch Korrekturkurven angenähert, deren Dezibel Werte, wie die Phon-Skala, nur bei einem 1kHz Ton dem wirklichen Schallpegel entsprechen. Die Korrekturkurve nach Filter A nähert den komplizierten Verlauf der Phonkurve durch eine monotone Funktion, Filter C gibt den Schallpegel nur schwach korrigiert. Einhe it N s m3 Formel v Schallwiderstand W m2 Intensität, Schallstärke: Mittlere Energieflußdichte des Mediums: Energie, die in einer Zeiteinheit auf eine senkrecht zur Ausbreitungsrichtung stehende Ebene trifft (vgl. Tabelle 12) I 0 10 12 W m2 Intensität des gerade noch hörbaren 1kHz Tones p 0 20 10 -6 Pa Schalldruck dazu 2 I Anmerkung 1 1 p 2 v u0 0 2 2 v Hörschwelle: Lautstärke, Schallintensität I und Schalldruck p : Weber-Fechnersches Gesetz : Die Lautstärke wird etwa logarithmisch zu der Schallintensität I bzw. dem Schalldruck p empfunden. ~ log 10 I ~ log 10 p 2 2 log 10 p Lautstärke eines Geräuschs. Bei 1kHz zeigen alle Angaben den echten Schallpegel: 10 log 10 I 1kHz p1kHz 20 log 10 I0 p0 10 log 10 I p 20 log 10 I0 p0 Angabe in Phon: I 1kHz I 0 zeigt das Verhältnis der Intensität eines 1kHz Tones zu dessen Intensität an der Hörschwelle, der genauso laut Phon wie das zu messende Geräusch empfunden wird. Analoges gilt für die Schalldrucke p 1kHz p 0 (vgl. die Abbildung) dB Angabe in dB, ein nachgestellter Buchstabe nennt eine evtl. angewandte Filter-Kurve: 19 Nähert den Verlauf der Phon-Kurve durch eine einfach gekrümmte Korrekturkurve an A C Tabelle 13 Begriffe zur Schallmessung Sehr flache Korrekturkurve, korrigiert den Schallpegel bei 31,5 Hz und 8 kHz um –3dB. 20 Pa) Bei geeigneter Abstimmung kann man stehende Schallwellen erzeugen: Versuch 17 Quinkesches Resonanzrohr. In ein senkrechtes, in einem Wasserbad stehendes Rohr wird von oben mit einem Lautsprecher ein Ton eingespielt. Von unten wird das Rohr stetig „verkürzt“, indem der Wasserspiegel erhöht wird. Wenn die Rohrlänge (2n 1) / 4 erreicht wird der Ton lauter, weil eine stehende Welle in Resonanz mit dem Lautsprecher am offenen Ende einen Schwingungsbauch erzeugt. Versuch 18 Herrn Neu‘s Kundtsches Rohr: In ein einseitig geschlossenes Rohr wird von der offenen Seite ein Ton variabler Frequenz eingespielt. Erfüllt die Wellenlänge die Bedingung Rohrlänge= (2n 1) / 4 , dann bildet sich eine stehende akustische Welle, deren Druckbäuche und Knoten mit Flämmchen angezeigt werden! In stehenden Wellen gleichen die schnell bewegten Teilchen die Druckunterschiede aus. An Stellen der Bäuche der Geschwindigkeit zeigt der Druck Knoten und umgekehrt.