Mathematische Begriffe und Hilfsmittel
Werbung

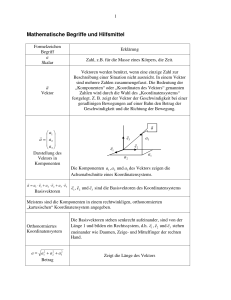
1 Mathematische Begriffe und Hilfsmittel Formelzeichen a a Begriff Erklärung Skalar Zahl, z.B. für die Masse eines Körpers, die Zeit. Vektor Vektoren werden benötigt, um außer einer Maßzahl, seinem Betrag, eine zu dieser gehörende Richtung anzuzeigen. a e3 a1 a a2 a 3 Darstellung des Vektors in Komponenten e1 a2 e2 a3 a1 Die Komponenten a1 , a2 und a3 des Vektors zeigen die Achsenabschnitte eines Koordinatensystems. e1 , e2 und e3 sind die Basisvektoren des a a1 e1 a2 e2 a3 e3 Basisvektoren Koordinatensystems Meistens sind die Komponenten in einem rechtwinkligen, orthonormierten „kartesischen“ Koordinatensystem angegeben. Die Basisvektoren stehen senkrecht aufeinander, Orthonormiert sind von der Länge 1 und bilden ein es Rechtssystem, d.h. e1 , e2 und e3 stehen Koordinatensy zueinander wie Daumen, Zeige- und stem Mittelfinger der rechten Hand. a a12 a22 a32 Betrag Zeigt die Länge des Vektors Manchmal ist es sinnvoll, einen Vektor durch Betrag a und Richtung ea anzugeben a a ea Darstellu ng des Vektors durch Betrag und Richtung a1 1 ea a 2 a a3 Einheitsvektor, d.h. Vektor vom Betrag 1, der die Richtung von a angibt. Beispiel: Geschwindigkeit Kraft, Beschleunigung in einer vorgegeben Richtung, 2 Vektoren werden komponentenweise addiert. Dem entspricht die folgende geometrische Konstruktion: a1 b1 a b a2 b2 a b 3 3 Summe zweier Vektoren a b b a Beispiel: Kräfteparallelogramm b Multiplik ation mit einem Skalar b k a a b a b cos a , b a Beispiel: F m a (Kraft=Masse*Beschleunigung) Entspricht dem Produkt zwischen a und der Projektion von b auf a : b cos a , b a Skalarpro dukt b Beispiel: Die Arbeit ist das Skalarprodukt aus dem Kraft- und dem Wegvektor Speziell im dreidimensionalen Raum ist das Vektorprodukt definiert: Ergebnis: Vektor a b Richtung: Senkrecht auf a und b a b a b b Vektorpro dukt Betrag: a a b a b sin a , b Dieser entspricht der grau eingezeichneten Fläche des von a und b aufgespannten Parallelogramms Beispiel: L r p Der Drehimpulsvektor steht senkrecht auf Radius- und Impulsvektor 3 Funktionen, Ableitungen, Integrale y f x y ist eine Funktion der Variablen x Bei vorgegebenem x hat y den Wert f x f x kann durch eine Wertetabelle gegeben sein, z.B. bei einer Abzählung: Ist x die Nummer der Beobachtung, dann gibt f x die beobachtete Zahl. f x kann eine analytische Funktion sein, z.B. y sin x y df x 0 x dx y f ( x0 ) x x0 df (x) dx Mit Hilfe der Ableitung kann die Änderung y des Funktionswerts an der Stelle x 0 bei Änderung x des Arguments abgeschätzt werden. Anwendung in der Physik und Meßtechnik: Fehlerfortpflanzung. df x0 x zeigt, daß die Abweichung x vom Argument x 0 y dx die Abweichung y in der Funktion f bewirkt. Ist f x als Wertetabelle gegeben, dann wird die Ableitung numerisch als „Differenzenquotient“ berechnet: f ( x0 x) f ( x0 ) f ( x0 ) x x Differenti Ist die Funktion f x analytisch bekannt, dann liefert die Mathematik ation, Ableitung für deren Ableitung die Funktion y f x . Die Ableitungen wichtiger Funktionen sind: ( x r ) r x r 1 e e x c 0 ln x 1 x sin x cos x (c const.) x cos x sin x In der Physik sind die Ableitungen nach der Zeit t für folgende Größen besonders wichtig: f(t ) f (t ) f (t ) Mechanik Elektrizitätsl ehre Weg Geschwindigkeit Beschleunigung s (t ) v(t ) s(t ) a (t ) v(t ) s(t ) Ladung Strom Stromänderung Q(t ) I (t ) Q (t ) (t ) I(t ) Q 4 df (x) dx Ableitung eines Vektors nach einer Variablen Vektoren werden komponentenweise abgeleitet Beispiel für eine Anwendung in der Physik: Die Komponenten des Vektors der Geschwindigkeit sind die zeitlichen Ableitungen der Komponenten des Vektors der Bahn. Wird eine Funktion nach einem Vektor abgeleitet, dann entsteht ein Vektor, dessen Komponenten die Ableitungen der Funktion nach den Komponenten des Vektors sind. Beispiel für eine wichtige Anwendung in Physik und Meßtechnik: Die Fehlerfortpflanzung auf eine Funktion von mehreren Variablen. Der Wert y sei eine Funktion von vier Beobachtungen xi , i 1,2,3,4 , es gelte also y f ( x1 , x2 , x3 , x4 ) . Zur Berechnung der Abweichung y bei Abweichungen xi , i 1,2,3,4 der Variablen von den Werten xi0 , i 1,2,3,4 konstruiert man den Vektor df (x ) dx Ableitung einer Funktion nach einem Vektor df dx1 df dx y 2 df dx3 df dx 4 x x x 20 x 2 0 x3 x3 x 40 x 4 0 1 1 Die gesuchte Abweichung in y ist dessen Betrag: df 0 y xi xi i 1 dxi 4 2 5 Lineare Differentialgleichung 2. Ordnung mit konstanten Koeffizienten Eine Gleichung dieses Typs erhält man immer dann, wenn die 2. Ableitung einer Funktion nach der Zeit umgekehrt proportional zur Funktion selbst ist. Beispiele: In der Mechanik: Wenn auf einen Körper eine zum Weg x(t ) proportionale Kraft beschleunigend wirkt, dann ist die Trägheitskraft immer proportional zu x(t ) und der beschleunigenden Kraft entgegengerichtet. (Mechanische Schwingung) m x k x Die Elektrodynamik: Man erhält die analoge Gleichung, wenn eine zur Ladung Q(t ) proportionale Spannung eine (t ) Gegenspannung induziert, weil letztere proportional zu Q und der erzeugenden entgegengerichtet ist. (Elektrischer Schwingkreis aus Kondensator und Spule) Auch die Regeltechnik führt auf eine Gleichung dieses Typs, wenn die Regelgröße x(t ) im Takt ihrer zweiten Ableitung x(t ) verändert wird. (Es gibt z. B. Duschen, die man nur abwechselnd zu heiß oder zu kalt einstellen kann. Die mathematische Eigenschaft dieses Systems kann man mit T(t ) ~ T (t ) beschreiben.) x(t ) x0 sin t x(t ) x0 2 sin t m 2 k k m 2 T Lösung der Gleichung, man bezeichnet sie als „harmonische Schwingung“ und das System als „harmonischen Oszillator“ Zweite Ableitung der Funktion Folgt nach Einsetzen von x(t ) und x(t ) Die Winkelgeschwindigkeit (Kreisfrequenz) der Schwingung ist unabhängig von der Amplitude x 0 T ist die Periode der Schwingung 6 Die Integration ist die Umkehrung der Differentiation. Die Integration glättet, wie am folgenden Beispiel zu erkennen ist: s Beschleunigung t Diffe rentia tion s f ( x)dx Integ ratio n Geschwindigkeit t s Weg t Tabelle 1